 2018, Vol. 39
2018, Vol. 39

并联机构具有刚度大、误差小、承载能力大、动态响应性能好等优点而受到人们的青睐[1-3].少自由度并联机构中极为重要的一类是4自由度并联机构, 与6自由度并联机构相比, 其特点为成本低、结构简单、控制容易等, 因而成为机构学领域的研究焦点[4-7].Hiwa等[4]提出一种用于涡轮叶片加工的四自由度并联机构; Kong[5]提出一种3-RER 4自由度并联机构; 李坤等[6]提出了3UPS-UPR并联机构模型, 这种机构能实现绕定平台中心点的三维转动和沿Z轴的移动.耿明超等[7]提出一种耦合型4-UPS /UPR并联机构作为车辆运动模拟台; 但这些并联机构多含有中间约束分支, 或使用转动副来驱动, 使得机构构型较为复杂, 控制难度较大, 增加了制造成本; 同时, 机构承载力较低, 不易在重载场合应用.
基于此研究背景, 本文提出一种具有两维转动和两维移动的空间4自由度3UPS-UPR并联机构.与上述机构相比, 该机构具有结构简单、承载能力强、工作空间大及易于控制等优点, 可广泛用于机器人的机械臂、多维力传感器、人体康复装置等领域.因此, 本机构在工业生产和其他领域有着广阔的应用前景.
随着机器人向高精度、高速方向的发展, 其运动性能及性能优化成为机器人研究的关键.科学家提出多种指标来评价机器人性能的好坏[8-10], 但计算过程复杂, 工作量大.本文利用具有计算简单、通用性强等特点的雅可比矩阵条件数对3UPS-UPR并联机构进行性能指标分析, 得到机构尺寸与性能指标之间关系图谱, 并找出性能较优尺寸范围, 为机构优化设计提供理论依据, 避免了设计的盲目性.
1 并联机构运动学分析3UPS-UPR并联机构由动平台、定平台及连接动平台和定平台的分支组成, 其三维模型如图 1a所示.其中, 定平台通过3个结构完全相同的UPS (虎克铰-移动副-球副)驱动分支及1个UPR (虎克铰-移动副-转动副)驱动分支与动平台相连, 通过控制4个驱动分支的长度即可实现该机构的运动.

|
图 1 新型并联机构 Fig.1 Novel parallel mechanism (a)—三维模型;(b)—结构简图. |
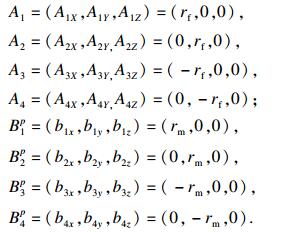
3UPS-UPR并联机构结构简图如图 1b所示, 在静平台和动平台中心分别建立固定坐标系O-XYZ和运动坐标系p-xyz, Ai(i=1, 2, 3, 4)均匀分布在以rf为半径的定平台圆周上, Bi(i=1, 2, 3, 4)均匀分布在以rm为半径的动平台圆周上.初始时刻, 运动坐标系p-xyz与固定坐标系O-XYZ相平行, 且Z轴与z轴重合.
Ai(i=1, 2, 3, 4)在定坐标系O-XYZ和Bi在动坐标系p-xyz中的坐标可分别表示为
|
当对动平台进行操作后, Bi(i=1, 2, 3, 4)在固定坐标系O-XYZ中可表示为

|
式中:p=[xp yp zp]T为p点在固定坐标系中坐标; RpO为运动坐标系相对于固定坐标系的旋转变换矩阵.设动平台首先绕X轴转动α角, 然后绕转动后的Y轴转动β角, 则旋转变化矩阵RpO可表示为
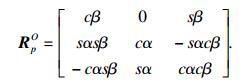
|
因此, 4个驱动分支的杆长为
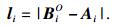
|
机构学中一个重要概念是影响系数矩阵, 能够反映机构运动学和动力学本质.用影响系数法分析机构速度、加速度、误差及受力等极为简单[11].
3UPS-UPR机构的UPR分支可等效为4个基本副(不足6个), 可利用虚设机构法在该支链上串联2个转动副, 使得UPR支链达到6个基本副[11].于是可根据虚设机构法建立3UPS-UPR并联机构的一阶影响系数矩阵(Jacobian矩阵).
1.2.1 UPS分支的一阶影响系数矩阵设第i (i=2, 3, 4)个UPS分支中第j (j=1, 2, …, 6)个运动副轴线的单位方向向量为Sj(i); 设运动坐标系p-xyz 原点p在定坐标系O-XYZ中的位置向量为p, Rj(i)为分支i中第j个运动副在定坐标系O-XYZ中的位置向量, p点相对于向量Rj(i)的矢量为(p-Rj(i)).由于UPS分支可等效为6个基本运动副, 根据影响系数矩阵构建方法[11]可得第i (i=2, 3, 4)个UPS分支一阶影响系数矩阵为

|
(1) |
UPR分支可等效为4个基本运动副, 根据虚设机构法[11], 可在该分支上串联2个转动副, 使UPR分支等效为6个基本副, 但所加的转动副须保证影响系数矩阵不奇异.设虚设转动副轴线单位向量和线矩分别为
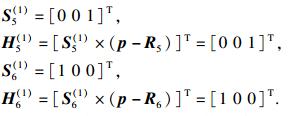
|
则UPR分支的一阶影响系数矩阵为

|
(2) |
在并联机构中, 当动平台的运动速度VH已知时, 各分支的运动速度为

|
(3) |
式中, [GΦH]r:-1(i)为第i分支逆矩阵[GΦH]-1(i)的第r行.
由于4个驱动分支为直线驱动, 则将该直线驱动分支的移动速度作为机构输入速度, 分别选取第1~4分支一阶影响系数矩阵[GΦH]-1(i)的逆阵的第3行为一阶综合影响系数逆阵的前4行; 因为第1分支UPR中第5和第6个运动副为虚设运动副, 所以选取UPR分支一阶影响系数的逆阵的第5和第6行为一阶综合影响系数逆阵的第5和第6行.机构一阶综合影响系数矩阵的逆阵为

|
(4) |
设机构输入速度为

|
(5) |
|
(6) |
式中:VH=[ωx ωy ωz vx vy vz]T; [GqH]为并联机构的一阶综合影响系数矩阵.
将式(6)代入式(3), 得每个支链中各运动副速度矢量

|
(7) |

|
(8) |
式中, [gqΦ](i)为分支i中各个运动副速度矢量与机构输入速度之间的一阶影响系数矩阵.
1.3 机构二阶综合影响系数矩阵及加速度求解 1.3.1 UPR和UPS分支的二阶影响系数矩阵机构的二阶影响系数是在一阶影响系数的基础上求得, 根据分支二阶影响系数矩阵的建立原则[11]可得UPR和UPS分支的二阶影响系数矩阵[HΦH](i)(i=1, 2, 3, 4).
当并联机构动平台的加速度AH已知时, 各支链的加速度

|
(9) |
式中, AH=[εx εyεz ax ay az]T.结合式(9)可将机构每个输入运动副的加速度表示为

|
(10) |
式中, 
则机构输入加速度
|
(11) |
式中: 
|
式中:“*”表示矩阵的广义标量积, 相当于将矩阵[GΦH]j-1:(j=3, 5, 6)看成一个常数, 且与[HΦH]中的每一个元素相乘.
式(11)可进一步简化为

|
(12) |
式中, [HHΦ]是6×6×6的标量矩阵.
此时, 并联机构动平台的加速度可由给定的输入加速度求出:

|
(13) |
式中, [HΦH]=[GΦH]*[HHΦ], [HΦH]为机构的二阶影响系数矩阵.
1.3.2 数值算例计算由于一阶影响系数矩阵的第1~4行对应机构的实运动副, 故所求的输入速度

设机构定平台半径rf=400mm, 动平台半径rm=300mm, 输出点p的输出速度和加速度分别为VH=[-6 6 0 0 0 0]T, AH =[0 0 0 0 0 0]T.根据并联机构速度方程式(5)及加速度方程式(12), 利用Matlab软件进行数值计算, 得4个主动件速度及加速度随时间变化曲线, 如图 2和图 3所示.从图 3中可知, 主动件1在t1=12s时加速度A1=3.2103mm·s-2, 在t2=18s时, 加速度A2=3.9996mm·s-2, 加速度峰值时间t3=16.02s, 此时加速度A3=4.2305mm·s-2, 峰值加速度与t1=12s时加速度之差为A3-A2=4.2305-3.2103=1.0202mm·s-2, 峰值加速度与t2=18s时加速度之差为A3-A2=4.2305-3.9996=0.2309mm·s-2, 加速度的波动会对动平台稳定性造成一定影响, 但此量纲单位时本机构加速度变化可以看作非常微小, 因此, 其波动对动平台的稳定性影响程度较小.

|
图 2 主动件速度曲线 Fig.2 Velocity of active limbs |

|
图 3 主动件加速度曲线 Fig.3 Acceleration of active limbs |
Hosseini等[10]提出基于工作空间的全局性能指标评价机构在全域空间内的性能, 其表达式为
|
(14) |
式中:ηJ为机构的全域性能度量指标; KJ为机构的条件数; W为机构的可达工作空间.
式(14)的数学意义是机构条件数KJ的倒数在可达工作空间上的平均值, 它的大小可以反映机构在整个工作空间内运动性能的好坏; 由于1≤KJ<∞, 所以0<ηJ≤1, ηJ的值越接近于1, 机构的灵巧度越高, 机构的运动学性能越好.
2.1 性能指标方程建立建立正确的性能评价指标是并联机构优化设计的基础.机构输入速度与末端输出速度之间关系为
|
(15) |
式中, [GqH]为一阶影响系数矩阵, 即Jacobian矩阵.
式(15)表述的是机构理想状态下(铰链间隙、构件制造误差、装配误差及主动件输入误差均为0)的运动方程, 但现实中机构不可避免地存在铰链间隙、构件制造误差、装配误差及主动件输入误差, 此时, 主动件的输入速度相对理想状态的输入速度


|
(16) |
式(16)和式(15)相减, 舍去高阶项, 两端取范数, 变形得
|
(17) |
式中, 因子‖[GqH]‖·‖[GqH]-1‖是雅可比矩阵的条件数, 用KG来表示, 它是衡量机构运动精度的一个度量.若矩阵条件数KG的值较大, 会使输入和输出之间的传递关系严重失真.由式(17)知, 主动输入速度的微小偏差将导致末端执行器输出的较大偏差, 此时雅可比矩阵条件数KG是输入速度相对偏差的放大因子.
由式(14)可知, 并联机构的全域性能指标可表示为
|
(18) |
式中, KG =‖[GqH]‖·‖[GqH]-1‖.
在此改变机构定平台和动平台的尺寸来研究尺寸变化对机构性能的影响.设机构定平台半径rf=600~700mm, 动平台半径rm=450~550mm, 步长为20mm, 其他尺寸不变, 共组建36组不同尺寸的机构, 根据36个ηG的值可画出这36组机构的全域性能指标图谱, 如图 4所示.由图 4可知, 当定平台半径较小、动平台半径较大时, 机构的全域性能指标越大, 即当rf=600~619mm, rm=535~550mm时, 机构的ηG值较大, 速度输出误差较小, 此时ηG=0.10508, 即机构此尺寸时在整个工作空间的灵巧度和控制精度较高.

|
图 4 全域性能图谱 Fig.4 Global performance index |
本文从并联机构动平台和定平台尺寸与机器人雅可比矩阵条件数之间关系出发, 给出了提高该并联机构运动性能的动平台和定平台尺寸范围; 并联机构优化设计为一宏观概念, 在实际设计过程中, 还需以此为基础考虑多方面因素, 如各构件尺寸、构件强度刚度、机构动态性能和设计经济型指标等, 并且针对具体设计要求作进一步的分析和讨论.
2.2 算例分析为验证上述性能指标计算的正确性, 根据上述性能图谱取两组不同尺寸的并联机构进行分析.取第一组机构尺寸为rf=600mm, rm=550mm; 取第二组机构尺寸为rf=700mm, rm=450mm.取第一驱动分支为研究对象, 当两组机构末端执行器输出速度相同时, 根据式(5)和式(12)可求出第一驱动分支的输入速度和加速度, 如图 5和图 6所示.

|
图 5 主动件1速度曲线 Fig.5 Velocity of active limb 1 |

|
图 6 主动件1加速度曲线 Fig.6 Acceleration of active limb 1 |
从图 5中可以看出第一组机构的第一驱动分支运动速度较第二组机构平缓, 且同一时刻, 第二组机构的速度振幅大于第一组机构, 不利于对机构进行控制.从图 6可以看出, 在t = 8 ~20s时, 该机构加速度曲线变化较为剧烈, 对机构的控制带来一定难度, 而第一组机构的加速度振幅较小, 说明该组机构运动学性能较好.与上述机构性能分析结果相吻合, 验证了性能评价指标的正确性.
综合速度与加速度运动曲线及性能评价指标分析可知:一定尺寸条件下, 减小定平台半径尺寸, 增大动平台半径尺寸有利于改善机构输入速度和加速度性能, 提高机构的控制精度.最后, 需指出在该机构的实际设计过程中, 还需针对具体情况作进一步分析与讨论.
3 结论1) 提出一种具有两维转动和两维移动的新型3UPS-UPR并联机构, 推导了该并联机构位置反解方程, 利用虚设机构法建立了一阶和二阶影响系数矩阵, 并推导了该机构速度与加速度表达式.通过速度和加速度仿真曲线可知该机构运动平稳, 各主动件速度和加速度均未出现突变或断点, 说明机构设计的正确性, 为后期机构的运动控制奠定了基础.
2) 通过雅可比矩阵条件数对3UPS-UPR并联机构全域性能指标进行分析.通过性能图谱可知, 当机构定平台半径rf=600~619mm, 动平台半径rm=535~550mm时, 机构全域性能指标较大, 速度和加速度运动性能较好.因此, 在机构设计时可以根据需要选取最优尺寸, 避免尺寸选取的盲目性.
| [1] |
Meng X D, Gao F, Wu S F.
Type synthesis of parallel robotic mechanisms:framework and brief review[J]. Mechanism and Machine Theory, 2014, 78: 177–186.
DOI:10.1016/j.mechmachtheory.2014.03.008 |
| [2] |
Lim H, Lee S H, So B R, et al.
Design of a new 6-DOF parallel mechanism with a suspended platform[J]. International Journal of Control, Automation, and Systems, 2015, 13(4): 942–950.
DOI:10.1007/s12555-014-0123-3 |
| [3] |
Plitea N, Szilaghyi A, Pisla D.
Kinematic analysis of a new 5-DOF modular parallel robot for brachytherapy[J]. Robotics and Computer-Integrated Manufacturing, 2015, 31: 70–80.
DOI:10.1016/j.rcim.2014.07.005 |
| [4] |
Hiwa G, Payeganeh G, Arbabtafti M.
Kinematic design of a novel 4-DOF parallel mechanism for turbine blade machining[J]. International Journal of Advanced Manufacturing Technology, 2014, 74(5/6/7/8): 729–739.
|
| [5] |
Kong X W.
Reconfiguration analysis of a 4-DOF 3-RER parallel manipulator with equilateral triangular base and moving platform[J]. Mechanism and Machine Theory, 2016, 98: 180–189.
DOI:10.1016/j.mechmachtheory.2015.12.007 |
| [6] |
李坤, 原大宁, 王庚祥, 等.
一种新型3-UPS/UPR并联机构运动学分析及应用[J]. 机械科学与技术, 2015, 34(2): 189–193.
( Li Kun, Yuan Da-ning, Wang Geng-xiang, et al. Kinematics analysis and application of a new 3-UPS/UPR parallel mechanism[J]. Mechanical Science and Technology, 2015, 34(2): 189–193. ) |
| [7] |
耿明超, 赵铁石, 王唱, 等.
4-UPS /UPR并联机构动力学分析[J]. 农业机械学报, 2014, 45(8): 299–306.
( Geng Ming-chao, Zhao Tie-shi, Wang Chang, et al. 4-UPS/UPR parallel mechanism dynamic analysis[J]. Transactions of the Chinese Society for Agricultural, 2014, 45(8): 299–306. DOI:10.6041/j.issn.1000-1298.2014.08.048 ) |
| [8] |
Gosselin C, Angeles J.
A global performance index for the kinematic optimization of robotic manipulators[J]. Journal of Mechanical Design, 1991, 113(3): 220–226.
DOI:10.1115/1.2912772 |
| [9] |
Liu S T, Huang T, Mei J P.
Optimal design of a 4-DOF SCARA type parallel robot using dynamic performance indices and angular constraints[J]. Journal of Mechanisms and Robotics, 2012, 4(3): 1–10.
|
| [10] |
Hosseini M A, Daniali H M.
Cartesian workspace optimization of tricept parallel manipulator with machining application[J]. Robotica, 2015, 33(9): 1948–1957.
DOI:10.1017/S0263574714000861 |
| [11] |
黄真, 赵永生, 赵铁石.
高等空间机构学[M]. 北京: 高等教育出版社, 2006: 169-191.
( Huang Zhen, Zhao Yong-sheng, Zhao Tie-shi. Advanced spatial mechanism[M]. Beijing: Higher Education Press, 2006: 169-191. ) |