 2019, Vol. 40
2019, Vol. 40

2. 辽宁轨道交通职业学院 机械工程系,辽宁 沈阳 110023
2. Department of Mechanical Engineering, Guidaojiaotong Polytechnic Institute, Shenyang 110023, China
两激振器或多激振器的自同步理论被广泛应用在振动机器中[1].然而,自同步振动机器的稳定区域有一定的局限性,为解决这个问题,在振动机器的设计中引入了控制同步理论.
近些年来,已经出现一定数量与控制同步相关的研究文献.Tomizuka等将自适应前馈控制理论应用到同步运动中[2-3].Miklos等使用了自适应滑膜控制算法研究了多台感应电机的速度跟踪与同步[4-5].Kong等[6]研究了两个不同的感应电动机驱动的同步控制:采用了主从电机控制策略并用PI法和自适应滑膜来控制速度,并将相位跟踪方法引入到相位同步中.随着控制方法的发展,基于PID法、模糊PID法在电机控制中得到了广泛的应用[7-8].
基频同步振动筛,只能实现直线或近似圆周或椭圆的运动,限制了物料的类型和筛选效率.而倍频振动同步运动虽然可以解决上述问题,但实际工程中难以实现.倍频控制同步可以实现不同类型的运动,可增加振幅,并最终提高筛分效率.因此,本文对两个同形偏心转子反向回转的倍频控制同步进行研究.
1 振动系统的动力学模型 1.1 机械系统模型如图 1所示,振动系统由一个刚性质体和两个装有偏心转子的感应电机,及4个与地基相连的弹簧组成.o点是刚体的几何中心与质心,刚体沿着x和y方向运动.两感应电机沿着y轴对称地与质体相连,质体上4个弹簧也对称分布.

|
图 1 振动系统的动力学模型 Fig.1 Dynamic model of the vibratory system |
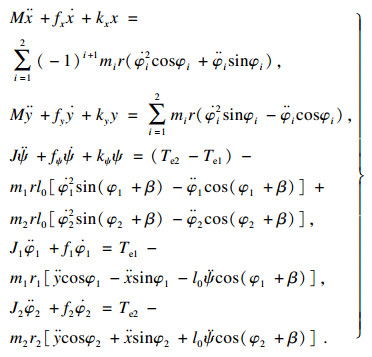
使用Lagrange方程,并选变量x, y, ψ, φ1和φ2为广义坐标,则振动系统的运动微分方程如下:
|
(1) |
其中:M=m1+m2+m;m1和m2是两转子的偏心质量,且m2=ηm1;m是刚体质量;r是偏心半径;l0是系统质心到偏心转子回转中心距离;J是系统的转动惯量,J=Mle2=Jp+(m1+m2)(l02+r2),其中Jp是刚体的转动惯量,且le是等效半径;J1和J2是两偏心转子的转动惯量,J1=m1r2,J2=m2r2;fx,fy,fψ分别是系统在x,y,ψ方向的阻尼系数;f1和f2是两感应电机的阻尼系数;kx,ky,kψ是弹簧的刚度;Te1和Te2分别是两感应电机的电磁转矩.
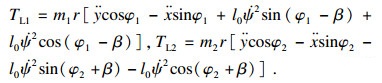
TL1和TL2是时变负载扭矩,可表示为
|
(2) |
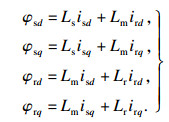
感应电机需要被控制,所以感应电机的模型如下:
|
(3) |
|
(4) |
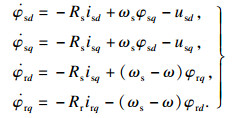
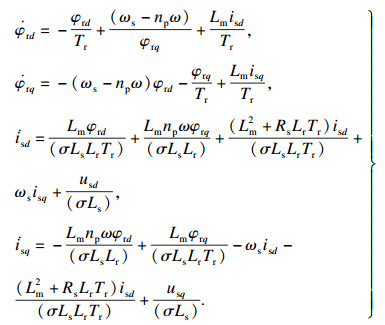
式(3)和(4)分别是在同步参考系中以d, q为轴的感应电机的磁链方程和电压方程.由于感应电动机模型为鼠笼式,转子部分会出现短路现象,于是urd=urq.当系统达到稳定状态时,φrd恒定,φrq=0.同步参考系的d和q轴上有9个变量,其中可以选择5个来建立转子磁场定向坐标系中感应电动机的状态方程.
本文中,ω-is-φr被选定,这里is代表isd和isq,φr代表φrd和φrq,ωs代表转速.这样方程可以表示为
|
(5) |
其中:下标s和r分别代表定子和转子;下标d和q分别代表d轴和q轴;i代表电流;u代表电压;R代表电阻;Ls和Lr分别代表定子和转子的自感系数;Lm是定子和转子的互感系数;Tr是转子的时间常数;Tr=Lr/Rr;同样,Ts=Ls/Rs;σ是泄漏因子,σ=1-Lm/(LsLr);np是感应电机的极对数;ω是机械转速;ωs是同步电动角速度.
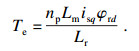
因为φrd=constant,φrq=0,根据感应电机的型号,可以得到以下方程.

|
(6) |
|
(7) |
如上所述,np,Lm,φrd和Lr都是常数.因此当感应电机稳定时,式(7)中的变量为isq.
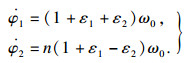
1.3 振动系统的响应根据文献[9],本文假设平均相位和相位差如下:

|
(8) |
其中n是振动系统多频同步系数.然后取φ1,φ2的导数,可得

|
(9) |
当系统达到稳态时,这意味着角速度的平均值为一常数[9],这里
|
(10) |
其中:

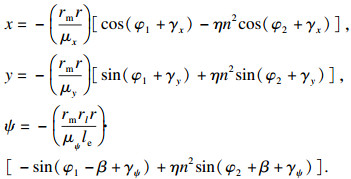
|
(11) |
其中:ωx2=kx/M,ωy2=ky/M,ωψ2=kψ/J, ξx=fx/(2 


如图 2所示,采用主从形式的控制方法,感应电机1,2分别是主电机与从电机.感应电机2跟踪感应电机1的相位角.感应电动机的电磁系统采用转子磁场定向控制(RFOC)和模糊PID控制.ωt是传输到主感应电机的给定速度.采用模糊PID控制方法,得到了电机1的转速ω1.然后将反馈值ω1用于两个部分,一部分用ωt控制主感应电机,另一部分通过积分法得到φ1,即跟踪从感应电机.最后,可以得到感应电机2的转速ω2和反馈给从电机的相位φ2.图 2中的RFOC被展示在图 3中.

|
图 2 控制系统流程图 Fig.2 Flow diagram of the controlled system |

|
图 3 转子磁场定向控制流程图 Fig.3 Flow diagram of rotor flux oriented control |
给定转速ωt减去反馈转速ω1,然后采用模糊PID法得到电磁转矩Te*,而Te*可以计算出定子在q轴上的电流isq*.定子在d轴上的电流isq*=φrd*/Lm,其中φrd*是给定的磁链.这样,usd*和usq*就得到.同步电动角度θ可以表示为
|
(12) |
其中:ωs是滑动角速度,ωs=Lmisq*/φrdTr.通过坐标变换,能够得到Usα*和Usβ*.最后,电机转速ω和电流iabc可以通过SVPWM技术获得.
2.2 模糊PID法的设计根据文献[9],模糊系统可以通过以下步骤构建.
步骤1 用变量xi(i=1, 2)的数字pi来界定模糊集Aili(li=1, 2, …, pi).
步骤2 依据模糊定律,运用∏i=12pi来构建模糊系统
R(j):如果x1是A1l2且x2是A1l2,那么 
模糊系统的输出可表示为
|
(13) |
其中:μAili(xi)是xi的成员函数;yfl1l2是集合θf∈R∏i=12pi中的自由参数.引入列向量ξ(x),式(13)可被推导为

|
(14) |
其中ξ(x)是带有维数∏i=12pi的列向量,其中第l1和第l2元素为
|
(15) |
给出了两个输入变量、三个输出变量.输入变量分别是错误(E)和错误变化(EC).输出变量分别是kP,kI,kD.这5个变量都被分成7种情况,分别是:NB,NM,NS,Z,PS,PM和PB.NB和PB是模型Z(zmf)的成员函数,其他是三角模型(trimf)的成员函数.
根据R(j)的表达,在本文中,用模糊控制定律建立了49条规则,从而得到了PID参数的方程:
|
(16) |
|
(17) |
|
(18) |
当速比和相位比均为1.5时,两电机可以被认为是同步的.在图 4a中,分别给出电机1的转速60rad/s和电机2的转速90 rad/s.在图 4b中,可见相位差没有稳定值,它是一个随时间变化的单调函数.所以当振动系统处于周期变化时电机不能达到同步状态.不同于n=1的情况,倍频自同步的振幅值由于振幅叠加而不能达到同一值.波峰和波谷的值随时间周期性变化.在图 4c~4e中可见振动系统在x, y, Ψ三个方向的一种特殊的现象:振幅的峰值发生正弦周期性变化.

|
图 4 n=1.5时倍频自同步 Fig.4 Multi-frequency self-synchronization for the situation n=1.5 (a)—电机转速;(b)—相位差;(c)—x方向响应;(d)—y方向响应;(e)—Ψ方向响应. |
虽然倍频自同步不能实现,却可以实现倍频控制同步.图 5中给出的主电机转速为60 rad/s.然后用相位比法,从电机对主电机进行跟踪.采用这种方法,主电机和从电机均能达到转速和相位同步状态.在图 5中,当系统达到如图 5c所示的稳定状态时,相位比为1.5,验证了该方法的有效性.图 5e表示:当相位比达到1.5时,相位差为0,这保证了方程的准确性(φ1-φ2=0,即φ2/φ1=1).同样,φ2-1.5φ2=0, 即φ2/φ1=1.5.根据式(8)~式(10),如果相位比等于1.5,则速度比也等于1.5.图 5c中的仿真结果与理论推导一致.从图 5a可知,从电机转速为90 rad/s.所以速度和相位都实现了倍频同步.与基频同步相比,每个波峰或波谷在周期内的值不存在一个标准的正弦变化.因为两电机的速度不同,波峰和波谷随电机的运行而出现振型叠加现象,这就导致波峰和波谷在一个周期内出现不同值.这是因为电机1的速度比电机2的速度快,当两电机反向旋转时,振幅处于叠加状态.

|
图 5 n=1.5时倍频控制同步 Fig.5 Multi-frequency controlled synchronization for the situation n=1.5 (a)—电机转速;(b)—负载转矩;(c)—相位差;(d)—x方向响应;(e)—y方向响应;(f)—Ψ方向响应. |
图 6描述了倍频控制同步n=1.5时,框架在x, y两个方向的运动轨迹投影.这个反向回转的运动轨迹有利于振动效率,有利于筛分.

|
图 6 n=1.5时框架倍频控制同步运动轨迹 Fig.6 The movement track of the frame with multi-frequency controlled synchronization with n=1.5 |
1) 基于小参数平均法推导电机转速和相位的方程,从而给出振动系统在三个方向上的响应方程.
2) 应用数值仿真得出了在本文的动力学模型下,双机驱动振动系统的振动同步运动不能实现.
3) 通过引入基于主从控制策略的模糊PID算法,证明了反向回转双机驱动振动系统倍频控制同步可以实现;还可以实现最小公倍周期下的零相位差同步运动,证明了文中理论的正确性,同时证明了本文方法的有效性.
4) 通过平面内的运动轨迹证明了本文方法在工程实际中能够应用于多样的物料筛分.
| [1] |
Wen B C, Fan J, Zhao C Y, et al.
Vibratory synchronization and controlled synchronization in engineering[M]. Beijing: Science Press, 2009.
|
| [2] |
Tomizuka M, Hu J S, Chiu T C, et al.
Synchronization of two motion control axes under adaptive feed forward control[J]. Journal of Dynamic Systems, Measurement, and Control, 1992, 114(2): 196–203.
DOI:10.1115/1.2896515 |
| [3] |
Xiao Y, Zhu K.
Optimal synchronization control of high-precision motion systems[J]. IEEE Transactions on Industrial Electronics, 2006, 53(4): 1160–1169.
DOI:10.1109/TIE.2006.878317 |
| [4] |
Zhao D Z, Li C W, Ren J.
Speed synchronization of multiple induction motors with adjacent cross-coupling control[J]. Systems Engineering—Theory & Practice, 2009, 29(1): 110–117.
|
| [5] |
Miklos A, Szabo Z.
Simulation and experimental validation of the dynamical model of a dual-rotor vibrotactor[J]. Journal of Sound and Vibration, 2015, 334: 98–107.
DOI:10.1016/j.jsv.2014.06.011 |
| [6] |
Kong X X, Chen X Z, Dou J X, et al.
Controlled synchronization of two nonidentical homodromy coupling exciters driven by inductor motors in a vibratory system[J]. Proceedings of the Institution of Mechanical Engineers, Part C:Journal of Mechanical Engineering Science, 2016, 230(17): 3040–3054.
DOI:10.1177/0954406215607557 |
| [7] |
张莉, 李彦明, 马培荪, 等.
基于模糊PID控制器的多电机同步控制装置的应用[J]. 工业仪表与自动化装置, 2003(4): 11–13.
( Zhang Li, Li Yan-ming, Ma Pei-sun, et al. The synchronization control of a multi-motor based on a fuzzy PID controller[J]. Industrial Instrumentation & Automation, 2003(4): 11–13. DOI:10.3969/j.issn.1000-0682.2003.04.003 ) |
| [8] |
Passino K M, Yurkovich S.
A course in fuzzy system and control[M]. Upper Saddle River: Prentice Hall, 1996.
|
| [9] |
Zhao C Y, Zhu H T, Wang R Z, et al.
Synchronization of two non-identical coupled exciters in a non-resonant vibrating system of linear motion.Part Ⅰ:theoretical analysis[J]. Shock and Vibration, 2009, 16(5): 505–515.
DOI:10.1155/2009/259149 |