东北大学学报(自然科学版) ›› 2024, Vol. 45 ›› Issue (7): 913-920.DOI: 10.12068/j.issn.1005-3026.2024.07.001
• 信息与控制 • 下一篇
王宏伟( ), 李磊, 刘晨宇, 汪洵
), 李磊, 刘晨宇, 汪洵
Hong-wei WANG(), Lei LI, Chen-yu LIU, Xun WANG
摘要:
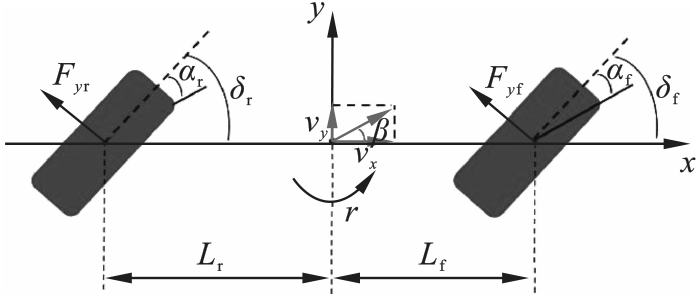
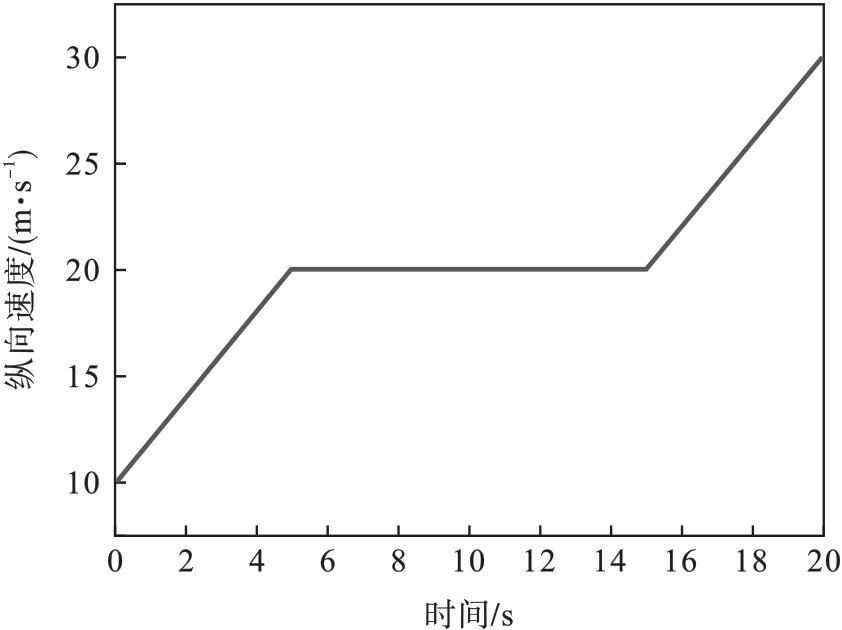
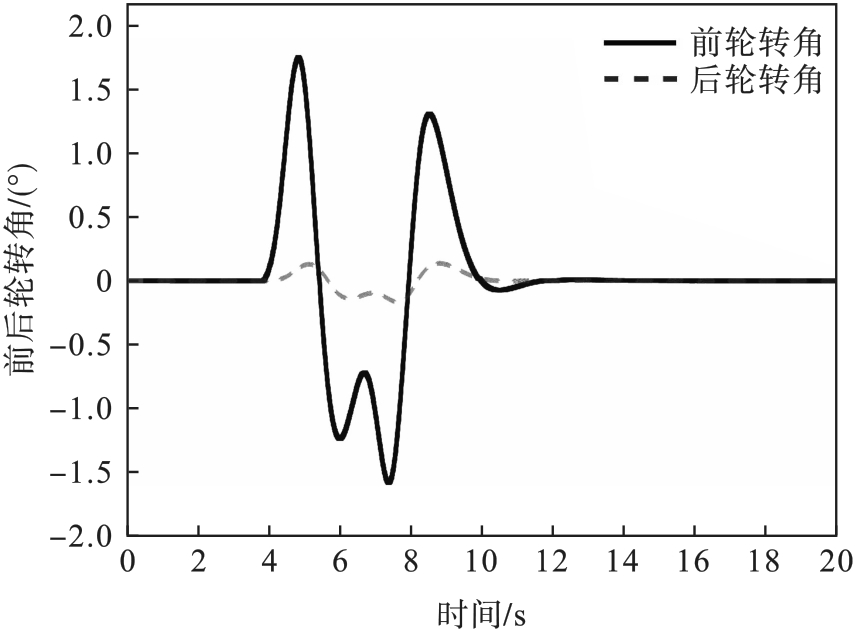
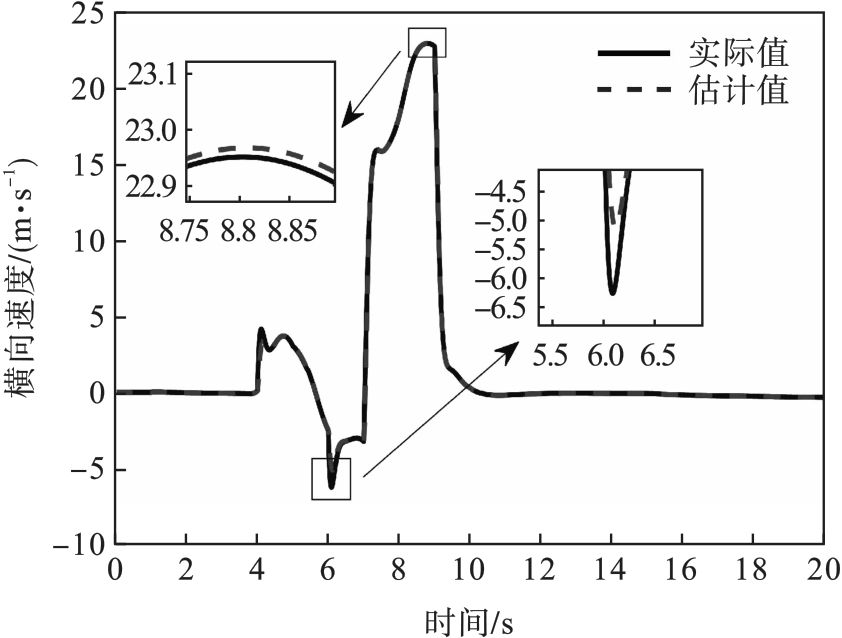
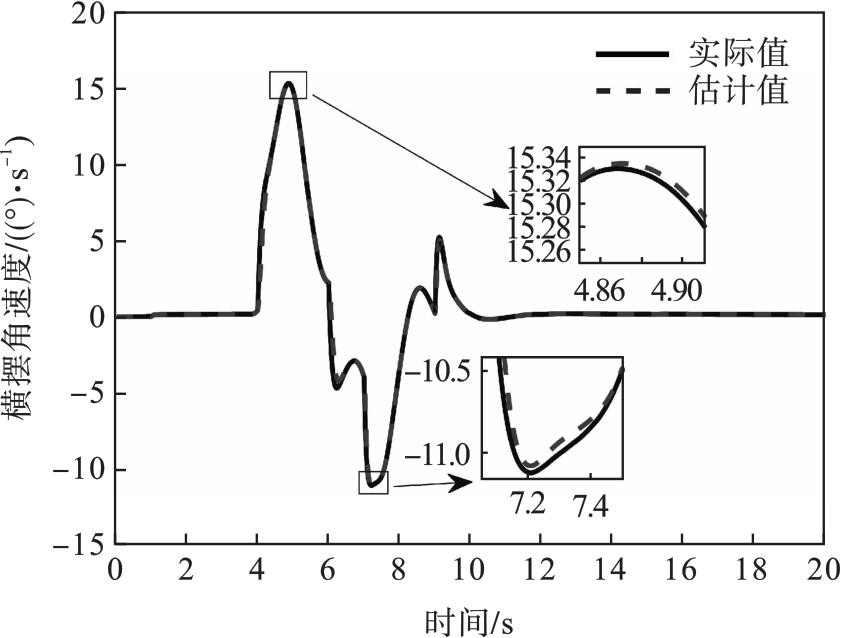
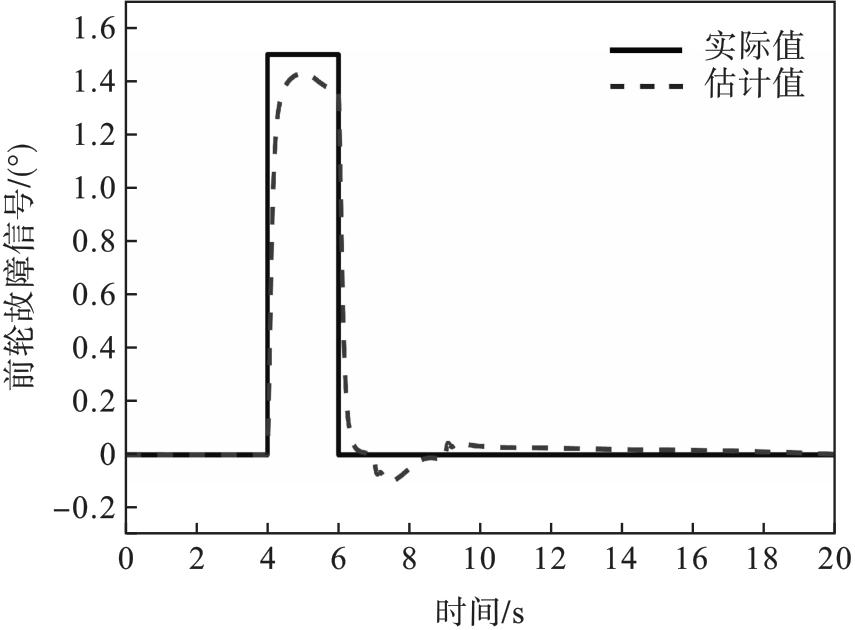
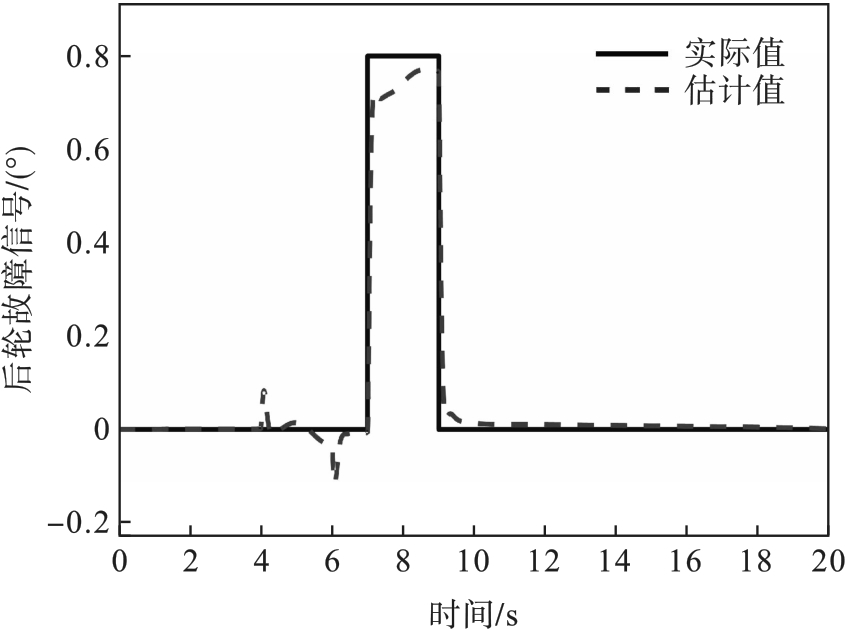
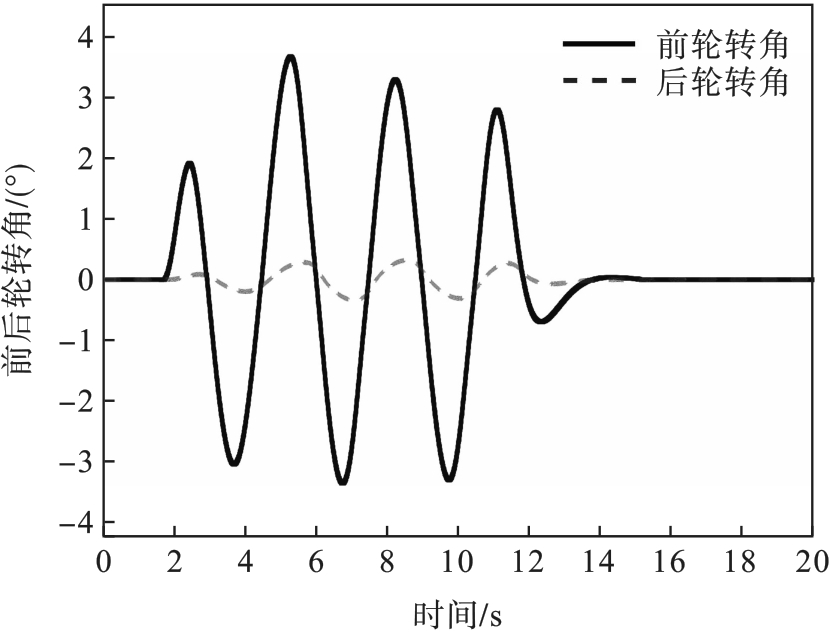
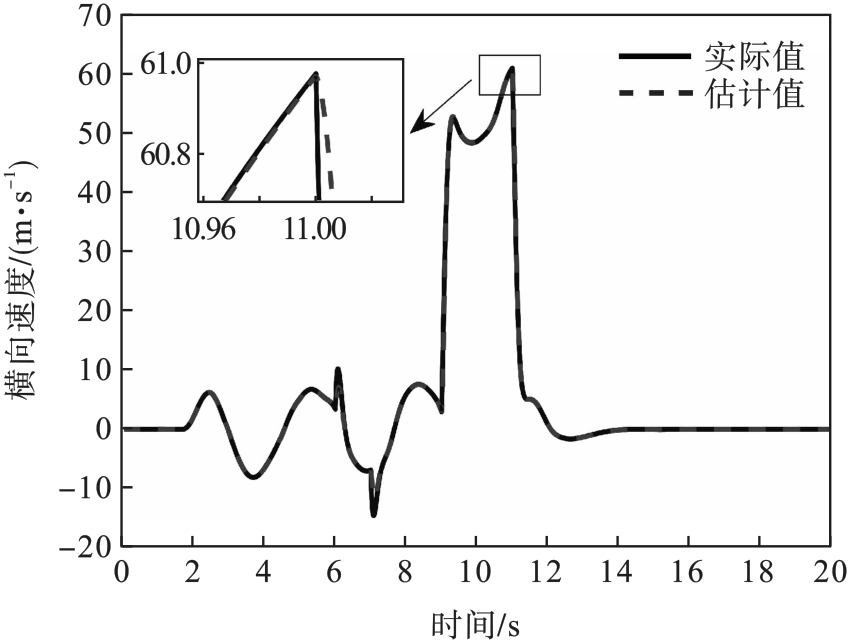
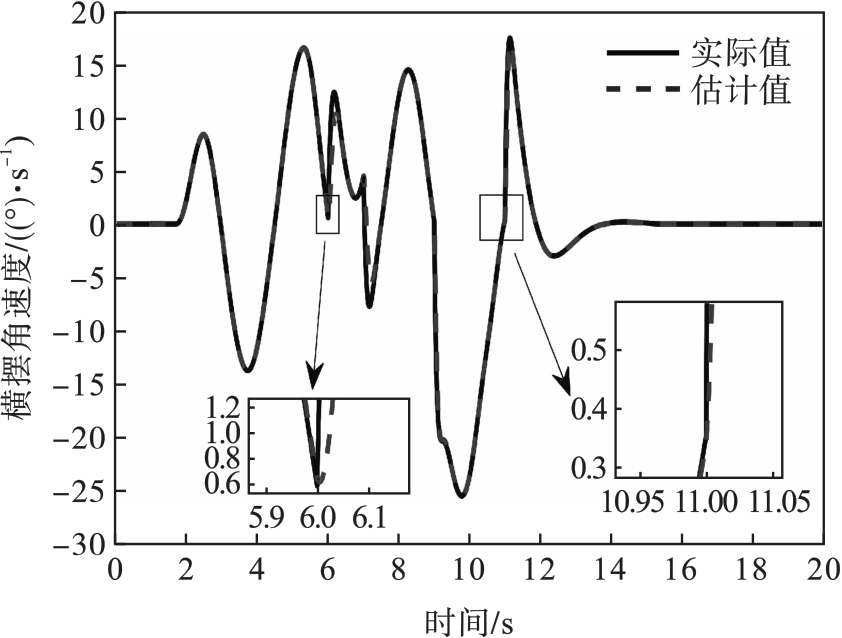
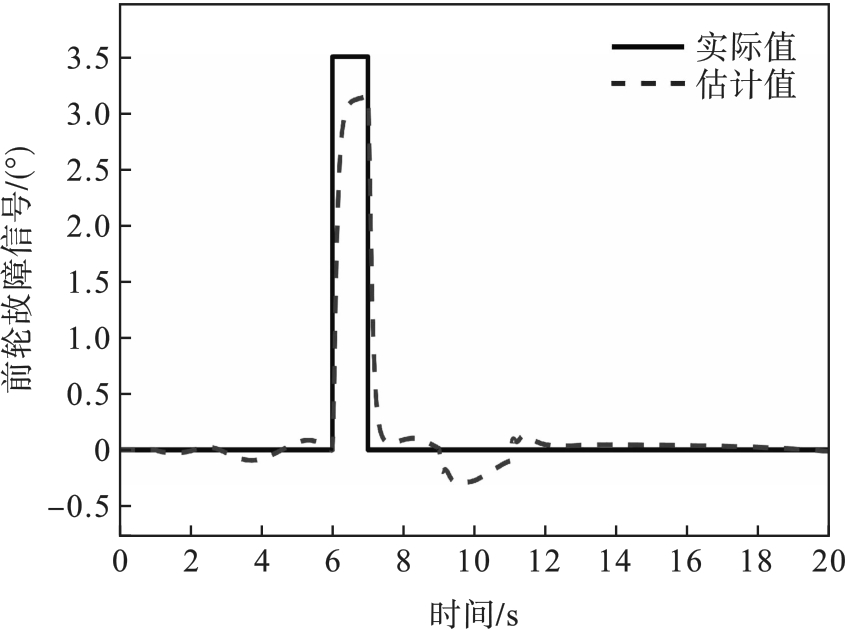
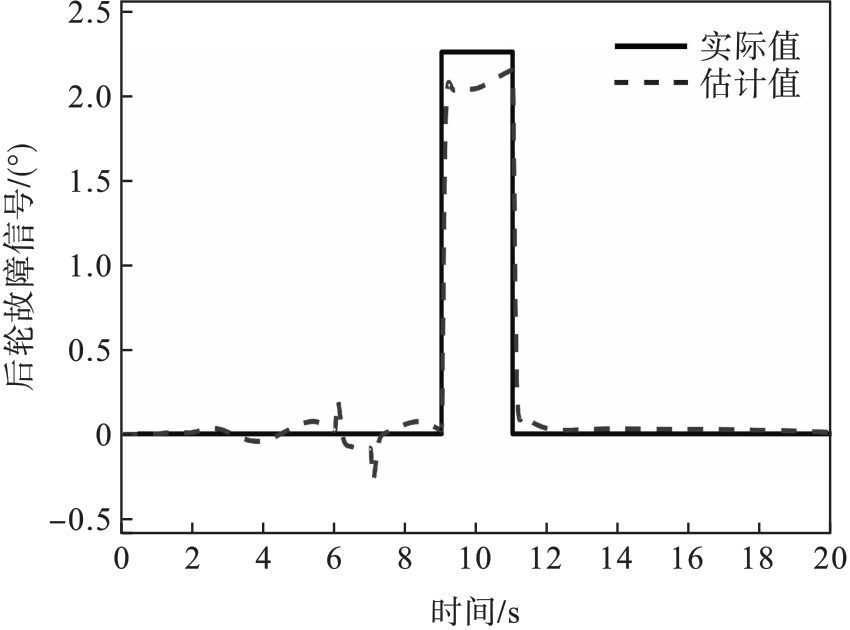
为解决传统车辆研究将纵向车速设为定值的问题,设计一种基于观测器的鲁棒增益调度故障诊断算法.首先,以纵向车速为调度变量,同时考虑执行器故障、模型不确定性以及外部干扰,在传统车辆模型基础上建立四轮转向线性变参数(linear parameter varying,LPV)数学模型.然后,对执行器故障进行状态重构,设计具有可变权重因子的鲁棒增益调度观测器,实现对车辆状态信息及执行器故障信号的双重估计.最后,选取双移线和蛇形工况,通过MATLAB/Simulink和Carsim联合仿真,结果表明,所设计的执行器故障诊断算法能有效处理车辆纵向车速的时变特性,在复杂工况下能及时快速地跟踪车辆的状态及故障信息,突破了原有传统车辆故障诊断算法的局限性.
中图分类号: