东北大学学报(自然科学版) ›› 2024, Vol. 45 ›› Issue (9): 1235-1243.DOI: 10.12068/j.issn.1005-3026.2024.09.003
• 信息与控制 • 上一篇
刘林1, 宋雨昊2,1( )
)
收稿日期:2023-04-28
出版日期:2024-09-15
发布日期:2024-12-16
通讯作者:
宋雨昊
作者简介:刘 林(1974-),女,四川资中人,西南交通大学副教授.
基金资助:
Lin LIU1, Yu-hao SONG2,1()
Received:2023-04-28
Online:2024-09-15
Published:2024-12-16
Contact:
Yu-hao SONG
About author:SONG Yu-hao, E-mail: 544552319@qq.com摘要:
为提高非视距场景下超宽带(ultra?wideband,UWB)定位精度,本文提出一种基于误差因子的改进加权最小二乘(weighted least square,WLS)算法.该算法利用测距值和实时信道冲激响应特征训练1维卷积神经网络,实现误差因子的准确预测;基于预测得到的误差因子设计改进WLS算法的加权矩阵,赋予不同基站合理的权重,以改善非视距场景下UWB定位性能.通过实测采集静态和动态定位数据对改进WLS算法进行性能验证.实验结果表明:视距场景下,改进WLS算法与最小二乘(least square,LS)算法、WLS算法定位性能相近;非视距场景下,改进WLS算法明显优于LS算法、WLS算法,能够有效抑制非视距误差.
中图分类号:
刘林, 宋雨昊. 基于误差因子的改进WLS超宽带定位算法[J]. 东北大学学报(自然科学版), 2024, 45(9): 1235-1243.
Lin LIU, Yu-hao SONG. Improved WLS Ultra-wideband Positioning Algorithm Based on Error Factor[J]. Journal of Northeastern University(Natural Science), 2024, 45(9): 1235-1243.
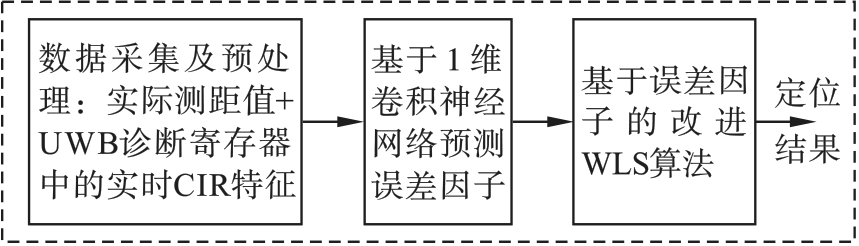
图1 UWB定位方案
Fig.1 UWB positioning scheme
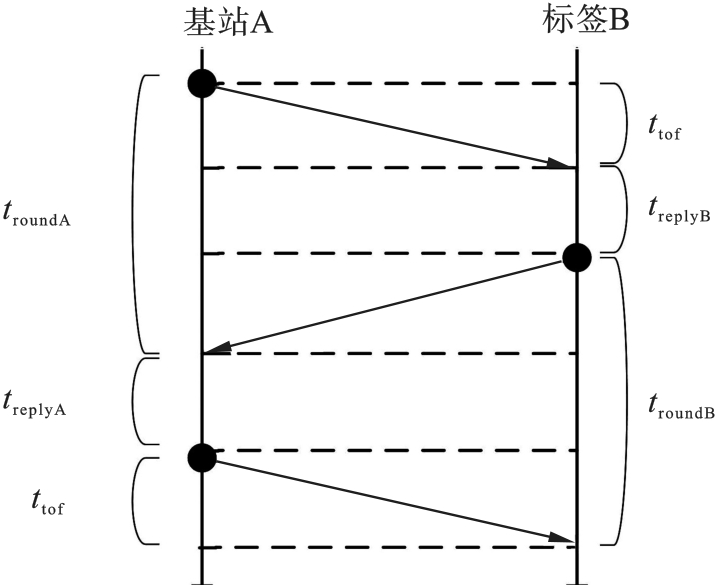
图2 AltDS-TWR测距原理图
Fig.2 Schematic diagram of AltDS-TWR ranging
| 名称 | 说明 |
|---|---|
| dr | 测距值 |
| F1 | 第一路径(point 1)的幅值 |
| F2 | 第一路径(point 2)的幅值 |
| F3 | 第一路径(point 3)的幅值 |
| Np | 前导码累积计数长度 |
| NMaxNoise | DW1000寄存器中报告的最大噪声 |
| σStdNoise | DW1000寄存器中报告的标准噪声 |
| CI | DW1000寄存器中报告的CIR功率值 |
| IFirstPath | 第一路径索引值 |
| PFPL | 第一路径信号功率 |
| PRPL | 接收信号功率 |
| Rp | 第一路径信号功率和接收信号功率之间的比值 |
表1 采集的实时特征
Table 1 Real?time features of acquisition
| 名称 | 说明 |
|---|---|
| dr | 测距值 |
| F1 | 第一路径(point 1)的幅值 |
| F2 | 第一路径(point 2)的幅值 |
| F3 | 第一路径(point 3)的幅值 |
| Np | 前导码累积计数长度 |
| NMaxNoise | DW1000寄存器中报告的最大噪声 |
| σStdNoise | DW1000寄存器中报告的标准噪声 |
| CI | DW1000寄存器中报告的CIR功率值 |
| IFirstPath | 第一路径索引值 |
| PFPL | 第一路径信号功率 |
| PRPL | 接收信号功率 |
| Rp | 第一路径信号功率和接收信号功率之间的比值 |
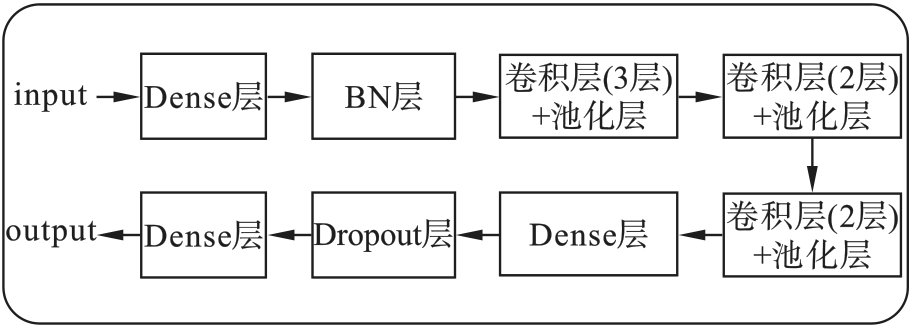
图3 1维卷积神经网络模型结构图
Fig.3 Structure diagram of 1DCNN model
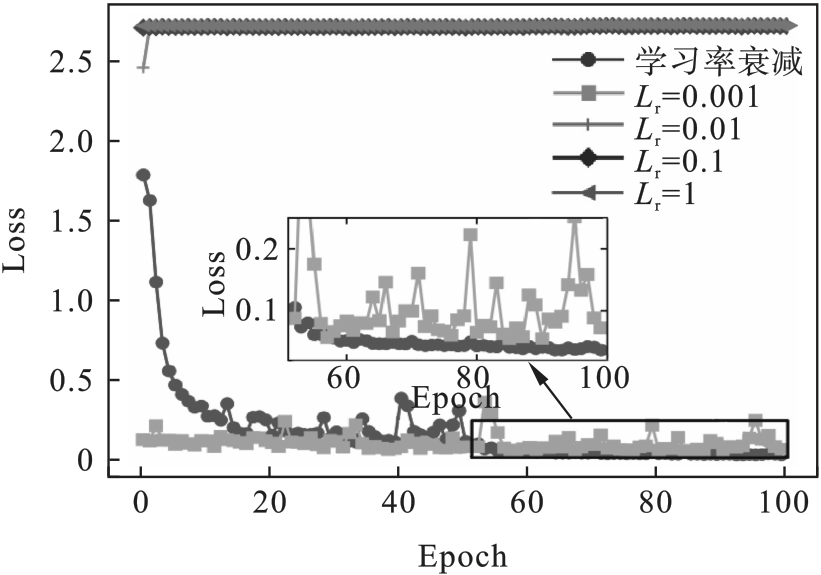
图4 不同学习率的模型性能
Fig.4 Model performance of different learning rates
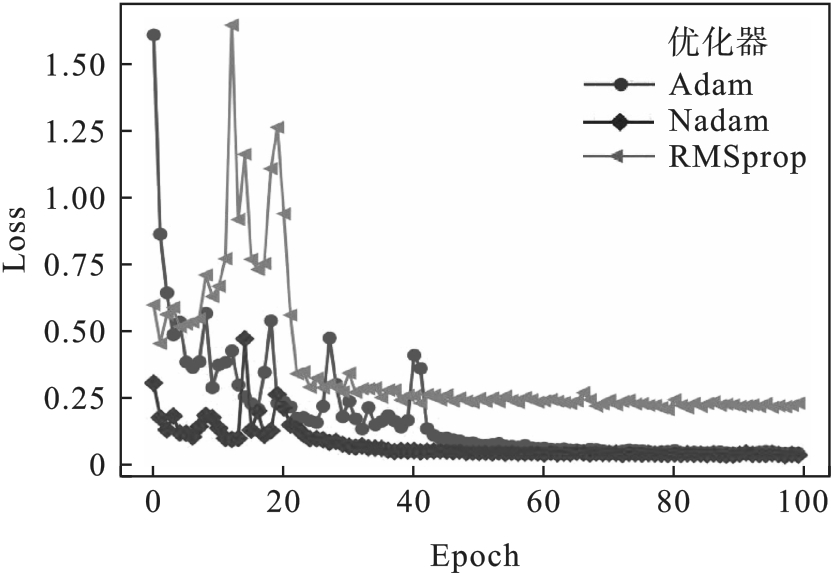
图5 不同优化器的模型性能
Fig.5 Model performance of different optimizers
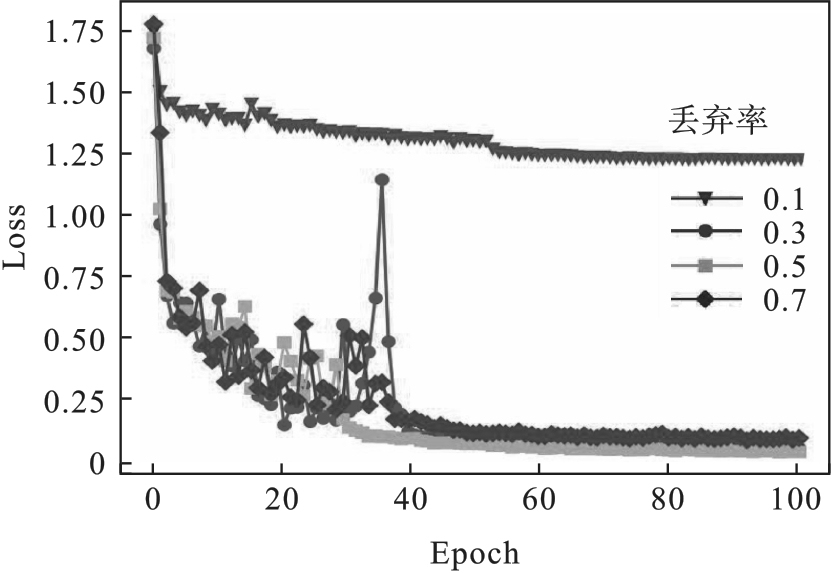
图6 不同丢弃率的模型性能
Fig.6 Model performance of different dropout rates
| 1DCNN超参数名称 | 取值/类型 |
|---|---|
| 学习率 | 初始值Lr=0.001,自适应衰减 |
| 优化器 | Nadam |
| 激活函数 | ReLU |
| 丢弃率 | 0.5 |
| 批量训练数据大小 | 64 |
| 损失函数 | 均方误差函数 |
表2 1DCNN模型超参数
Table 2 Hyperparameter of 1DCNN model
| 1DCNN超参数名称 | 取值/类型 |
|---|---|
| 学习率 | 初始值Lr=0.001,自适应衰减 |
| 优化器 | Nadam |
| 激活函数 | ReLU |
| 丢弃率 | 0.5 |
| 批量训练数据大小 | 64 |
| 损失函数 | 均方误差函数 |
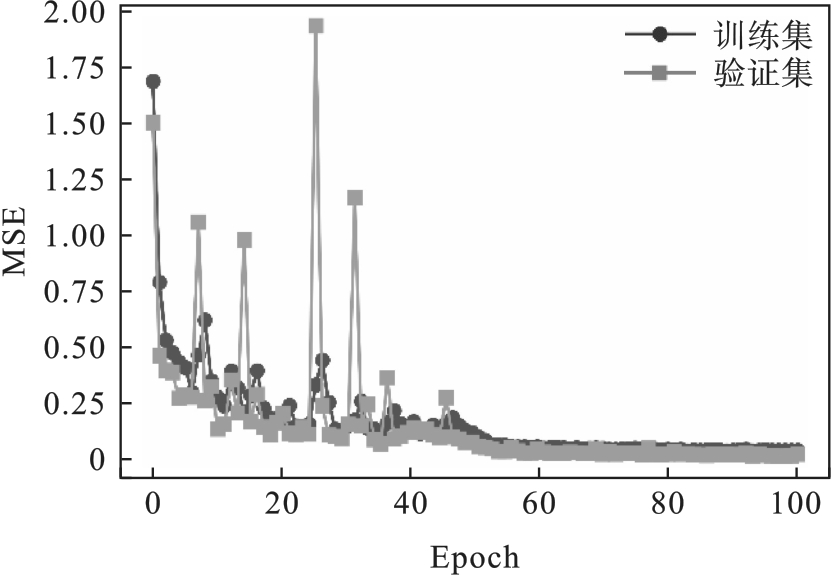
图7 训练集和验证集MSE对比情况
Fig.7 Comparison of MSE between training set and validation set
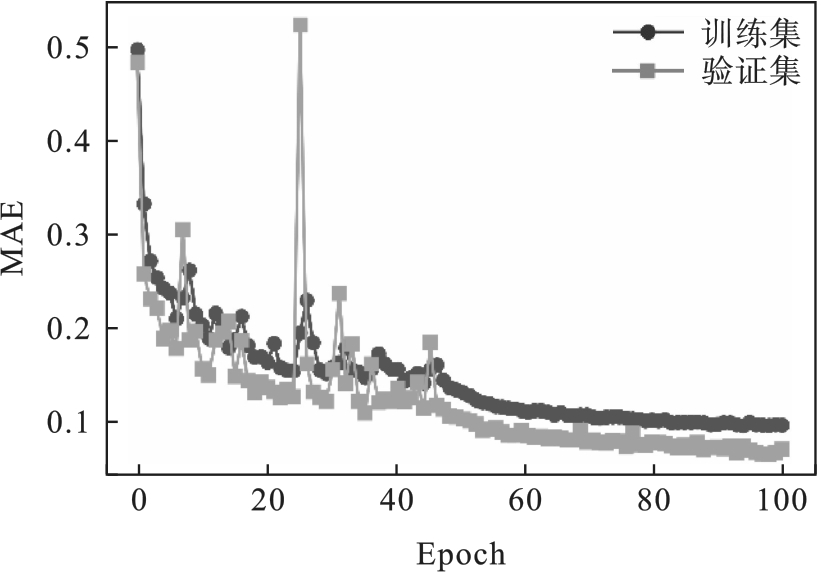
图8 训练集和验证集MAE对比情况
Fig.8 Comparison of MAE between training set and validation set
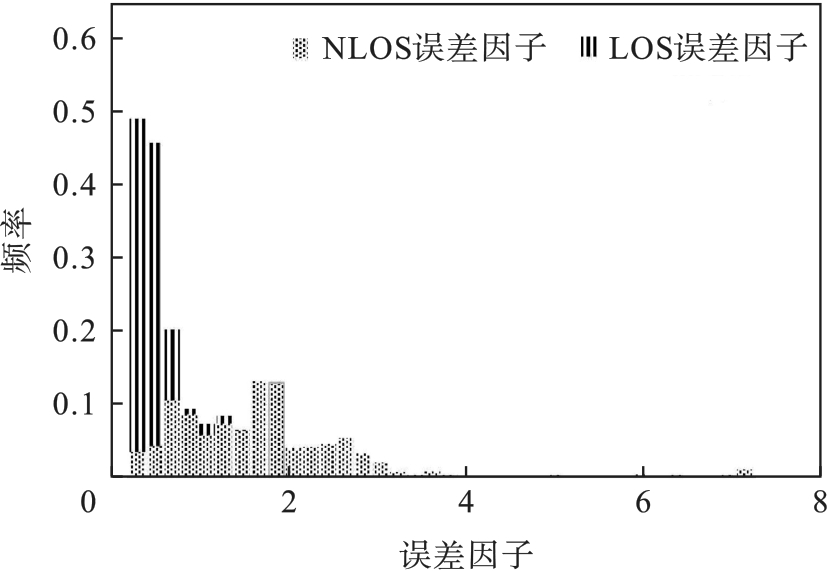
图9 误差因子频率分布直方图
Fig.9 Error factor frequency distribution histogram
| 算法 | 误差 | ||
|---|---|---|---|
| 均值 | 标准差 | RMSE | |
| LS | 2.66 | 0.98 | 2.83 |
| WLS | 2.66 | 0.98 | 2.83 |
| 改进WLS | 2.64 | 0.97 | 2.83 |
表3 实验1的定位误差 (cm)
Table 3 Positioning errors of experiment 1
| 算法 | 误差 | ||
|---|---|---|---|
| 均值 | 标准差 | RMSE | |
| LS | 2.66 | 0.98 | 2.83 |
| WLS | 2.66 | 0.98 | 2.83 |
| 改进WLS | 2.64 | 0.97 | 2.83 |
| 算法 | 误差 | ||
|---|---|---|---|
| 均值 | 标准差 | RMSE | |
| LS | 22.73 | 45.95 | 51.26 |
| WLS | 21.47 | 42.04 | 47.20 |
| 改进WLS | 11.84 | 25.51 | 28.12 |
表4 实验2的定位误差 (cm)
Table 4 Positioning errors of experiment 2
| 算法 | 误差 | ||
|---|---|---|---|
| 均值 | 标准差 | RMSE | |
| LS | 22.73 | 45.95 | 51.26 |
| WLS | 21.47 | 42.04 | 47.20 |
| 改进WLS | 11.84 | 25.51 | 28.12 |
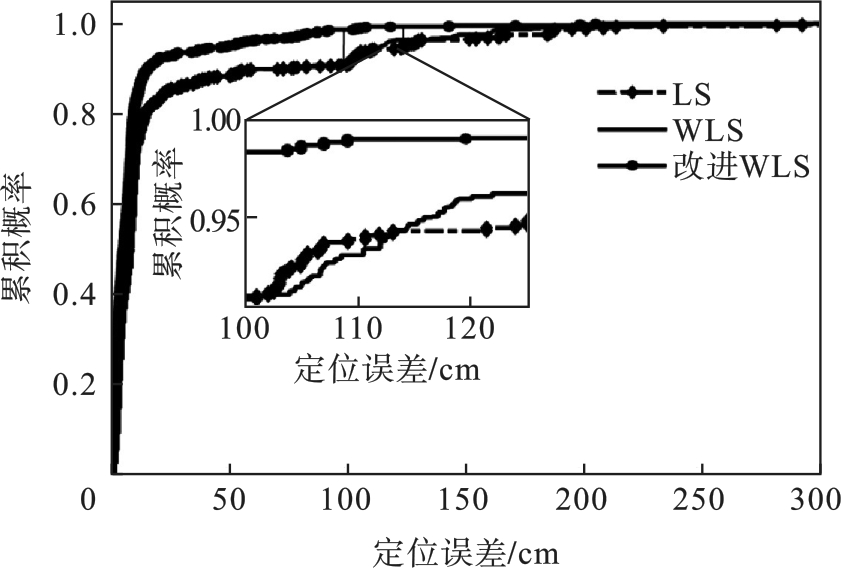
图10 实验2的CDF曲线
Fig.10 CDF curves of experiment 2
| 算法 | 定位误差 | ||
|---|---|---|---|
| 60% | 75% | 90% | |
| LS | 9.16 | 12.39 | 73.99 |
| WLS | 8.91 | 12.24 | 69.73 |
| 改进WLS | 7.88 | 9.67 | 16.41 |
表5 实验2的CDF分析表 (cm)
Table 5 CDF analysis table of experiment 2
| 算法 | 定位误差 | ||
|---|---|---|---|
| 60% | 75% | 90% | |
| LS | 9.16 | 12.39 | 73.99 |
| WLS | 8.91 | 12.24 | 69.73 |
| 改进WLS | 7.88 | 9.67 | 16.41 |
| 算法 | 误差 | ||
|---|---|---|---|
| 均值 | 标准差 | RMSE | |
| LS | 72.72 | 78.34 | 106.88 |
| WLS | 69.69 | 72.53 | 100.58 |
| 改进WLS | 36.78 | 52.96 | 64.47 |
表6 实验3的定位误差 (cm)
Table 6 Positioning errors of experiment 3
| 算法 | 误差 | ||
|---|---|---|---|
| 均值 | 标准差 | RMSE | |
| LS | 72.72 | 78.34 | 106.88 |
| WLS | 69.69 | 72.53 | 100.58 |
| 改进WLS | 36.78 | 52.96 | 64.47 |
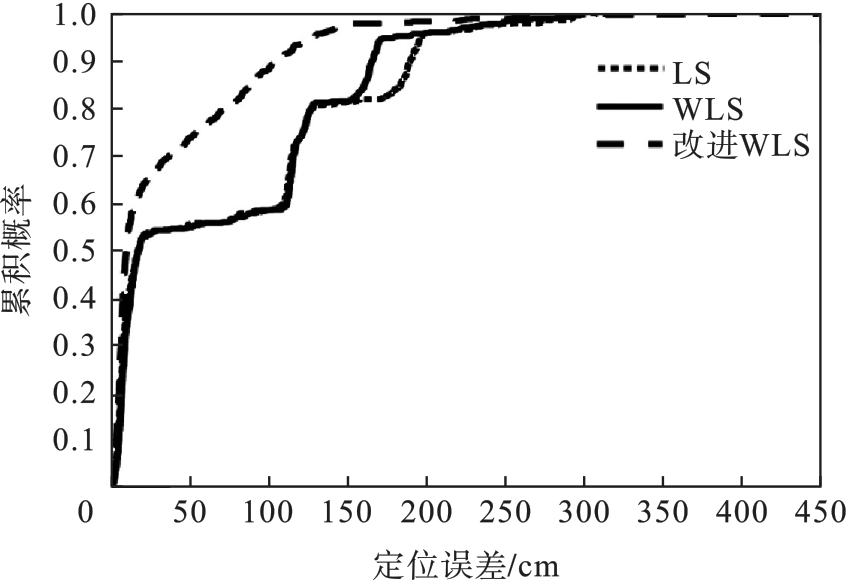
图11 实验3的CDF曲线
Fig.11 CDF curves of experiment 3
| 算法 | 定位误差 | ||
|---|---|---|---|
| 60% | 75% | 90% | |
| LS | 110.16 | 121.85 | 189.80 |
| WLS | 111.57 | 122.01 | 165.56 |
| 改进WLS | 16.37 | 54.35 | 104.65 |
表7 实验3的CDF分析表 (cm)
Table 7 CDF analysis table of experiment 3
| 算法 | 定位误差 | ||
|---|---|---|---|
| 60% | 75% | 90% | |
| LS | 110.16 | 121.85 | 189.80 |
| WLS | 111.57 | 122.01 | 165.56 |
| 改进WLS | 16.37 | 54.35 | 104.65 |
| 定位算法 | W11 | W22 | W33 | W44 |
|---|---|---|---|---|
| WLS | 0.729 | 0.723 | 0.466 | 0.004 |
| 改进WLS | 0.515 | 0.835 | 0.874 | 0.852 |
表8 实验3的加权矩阵设置
Table 8 Weighting matrix setting of experiment 3
| 定位算法 | W11 | W22 | W33 | W44 |
|---|---|---|---|---|
| WLS | 0.729 | 0.723 | 0.466 | 0.004 |
| 改进WLS | 0.515 | 0.835 | 0.874 | 0.852 |
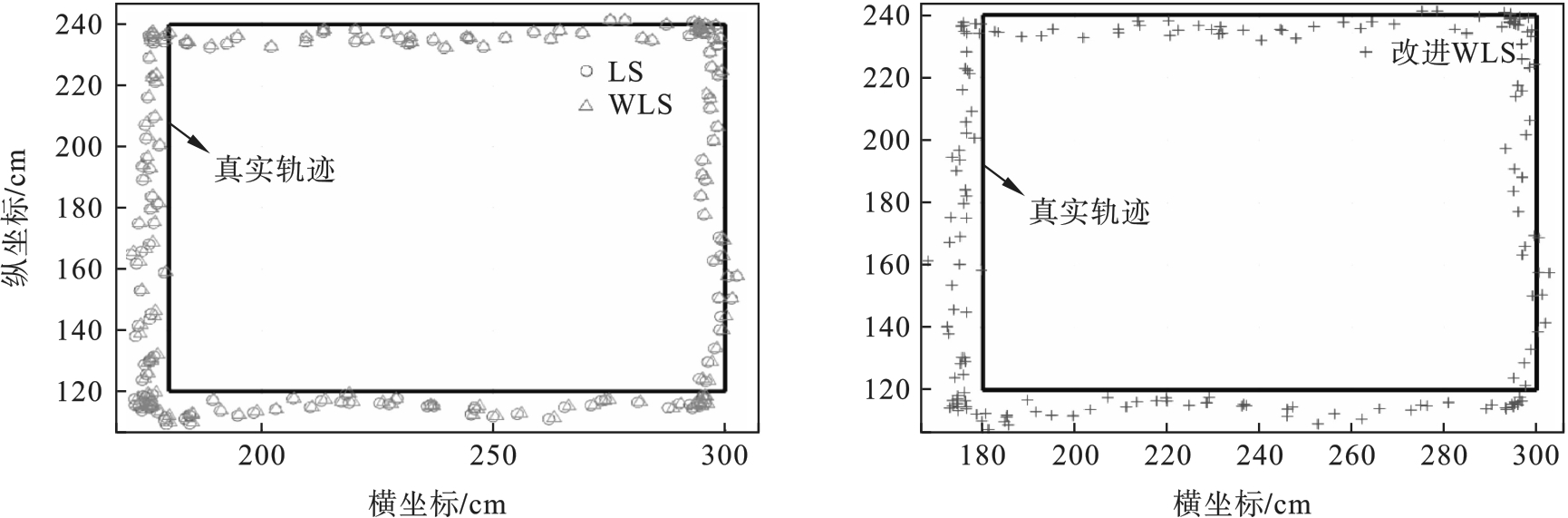
图12 LOS动态定位轨迹
Fig.12 LOS dynamic positioning trajectory
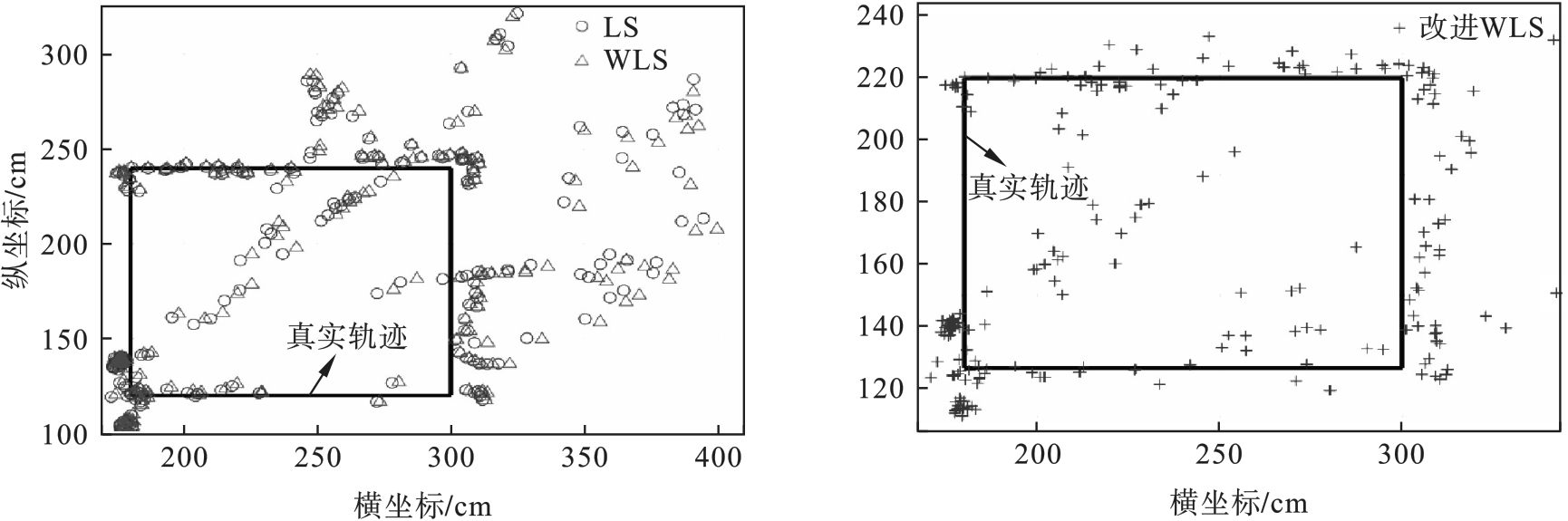
图13 NLOS动态定位轨迹
Fig.13 NLOS dynamic positioning trajectory
| 算法 | 时间 |
|---|---|
| LS | 4.120 |
| WLS | 4.129 |
| 改进WLS | 4.532 |
表9 不同算法的消耗时间 (s)
Table 9 Time consumption of different algorithms
| 算法 | 时间 |
|---|---|
| LS | 4.120 |
| WLS | 4.129 |
| 改进WLS | 4.532 |
| 1 | Batistić L, Tomic M.Overview of indoor positioning system technologies[C]//2018 41st International Convention on Information and Communication Technology,Electronics and Microelectronics. Opatija,2018:473-478. |
| 2 | 宋雨昊,刘林,王平.WKNN在UWB定位中的应用研究[J].现代计算机,2021,27(35):34-40,69. |
| Song Yu‑hao, Liu Lin, Wang Ping.Research on the application of WKNN in UWB positioning[J].Modern Computer,2021,27(35):34-40,69. | |
| 3 | Hu S C, He K, Yang X,et al.Bluetooth fingerprint based indoor localization using Bi‑LSTM[C]//2022 31st Wireless and Optical Communications Conference (WOCC).Shenzhen,2022:161-165. |
| 4 | Tan S, Ren Y L, Yang J,et al.Commodity WiFi sensing in ten years:status,challenges,and opportunities[J].IEEE Internet of Things Journal,2022,9(18):17832-17843. |
| 5 | Zhang S, Liu K H, Zhang Y L,et al.A coarse fingerprint‑assisted multiple target indoor device‑free localization with visible light sensing[J].IEEE Sensors Journal,2022,22(2):1461-1473. |
| 6 | Elsanhoury M, Mäkelä P, Koljonen J,et al.Precision positioning for smart logistics using ultra‑wideband technology‑based indoor navigation:a review[J].IEEE Access,2022,10:44413-44445. |
| 7 | Kim D H, Pyun J Y.NLOS identification based UWB and PDR hybrid positioning system[J].IEEE Access,2021,9:102917-102929. |
| 8 | Dong M Y.A low‑cost NLOS identification and mitigation method for UWB ranging in static and dynamic environments[J].IEEE Communications Letters,2021,25(7):2420-2424. |
| 9 | Chen C X, Huang Z, Wang J Y,et al.Channel‐quality‐evaluation‐based anchor node selection for UWB indoor positioning[J].Electronics,2022,11(3):436-450. |
| 10 | Wang T Y, Hu K K, Li Z H,et al.A semi‑supervised learning approach for UWB ranging error mitigation[J].IEEE Wireless Communications Letters,2021,10(3):688-691. |
| 11 | Bregar K, Mohorčič M.Improving indoor localization using convolutional neural networks on computationally restricted devices[J].IEEE Access,2018,6:17429-17441. |
| 12 | Angarano S, Mazzia V, Salvetti F,et al.Robust ultra‑wideband range error mitigation with deep learning at the edge[J].Engineering Applications of Artificial Intelligence,2021,102:104278-104286. |
| 13 | Yu K G, Wen K, Li Y B,et al.A novel NLOS mitigation algorithm for UWB localization in harsh indoor environments[J].IEEE Transactions on Vehicular Technology,2019,68(1):686-699. |
| 14 | Ferreira A G, Fernandes D, Branco S,et al.Feature selection for real‑time NLOS identification and mitigation for body‑mounted UWB transceivers[J].IEEE Transactions on Instrumentation and Measurement,2021,70:5502310. |
| 15 | Sang C L, Steinhagen B, Homburg J D,et al.Identification of NLOS and multi‑path conditions in UWB localization using machine learning methods[J].Applied Sciences,2020,10(11):3980-4004. |
| 16 | Che F H, Ahmed Q Z, Fontaine J,et al.Feature‑based generalized Gaussian distribution method for NLOS detection in ultra‑wideband (UWB) indoor positioning system[J].IEEE Sensors Journal,2022,22(19):18726-18739. |
| 17 | Sang C L, Adams M, Hörmann T,et al.An analytical study of time of flight error estimation in two‑way ranging methods[C]//2018 International Conference on Indoor Positioning and Indoor Navigation (IPIN).Nantes,2018:1-8. |
| 18 | Liu M Y, Lou X Z, Jin X P,et al.NLOS identification for localization based on the application of UWB[J].Wireless Personal Communications,2021,119(4):3651-3670. |
| 19 | 杨晓倩,童浩,王彬.一种基于测距信息的加权最小二乘定位算法[C]//第十一届中国卫星导航年会论文集——S09用户终端技术.成都,2020:81-86. |
| Yang Xiao‑qian, Tong Hao, Wang Bing.A weighted least‑squares localization algorithm based on ranging information[C]//The 11th China Satellite Navigation Annual meeting Proceedings:S09 User Terminal Technology.Chengdou,2020:81-86.) | |
| 20 | 陈楠,曹雪虹,焦良葆,等.变电站NLOS环境下的UKF超宽带定位改进算法[J].电力信息与通信技术,2021,19(5):71-81. |
| Chen Nan, Cao Xue‑hong, Jiao Liang‑bao,et al.Improved UKF UWB positioning algorithm in NLOS substation environment[J].Electric Power Information and Communication Technology,2021,19(5):71-81. |
| [1] | 黄越洋, 井元伟, 张嗣瀛, 石元博. 基于样本均值和中位值的粒子群优化定位算法[J]. 东北大学学报:自然科学版, 2018, 39(7): 913-917. |
| [2] | 胡楠, 吴成东, 刘鹏达, 于晓升. 基于严格残差选择的非视距定位算法[J]. 东北大学学报:自然科学版, 2016, 37(9): 1221-1224. |
| [3] | 程龙;吴成东;张云洲;贾子熙;. 基于假设检验的NLOS确定及最小残差定位算法[J]. 东北大学学报(自然科学版), 2012, 33(7): 917-921. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||