东北大学学报(自然科学版) ›› 2025, Vol. 46 ›› Issue (4): 124-133.DOI: 10.12068/j.issn.1005-3026.2025.20230292
• 资源与土木工程 • 上一篇
贺黎明, 岳峑佑, 曲政林, 张宇
Li-ming HE, Quan-you YUE, Zheng-lin QU, Yu ZHANG
摘要:
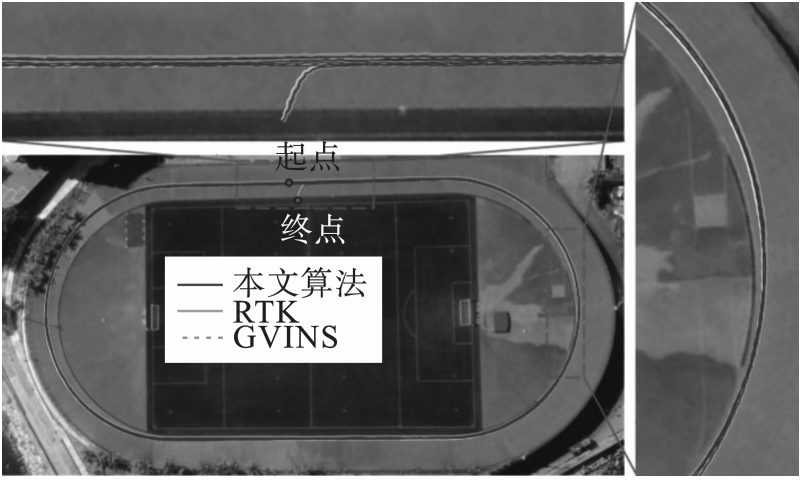
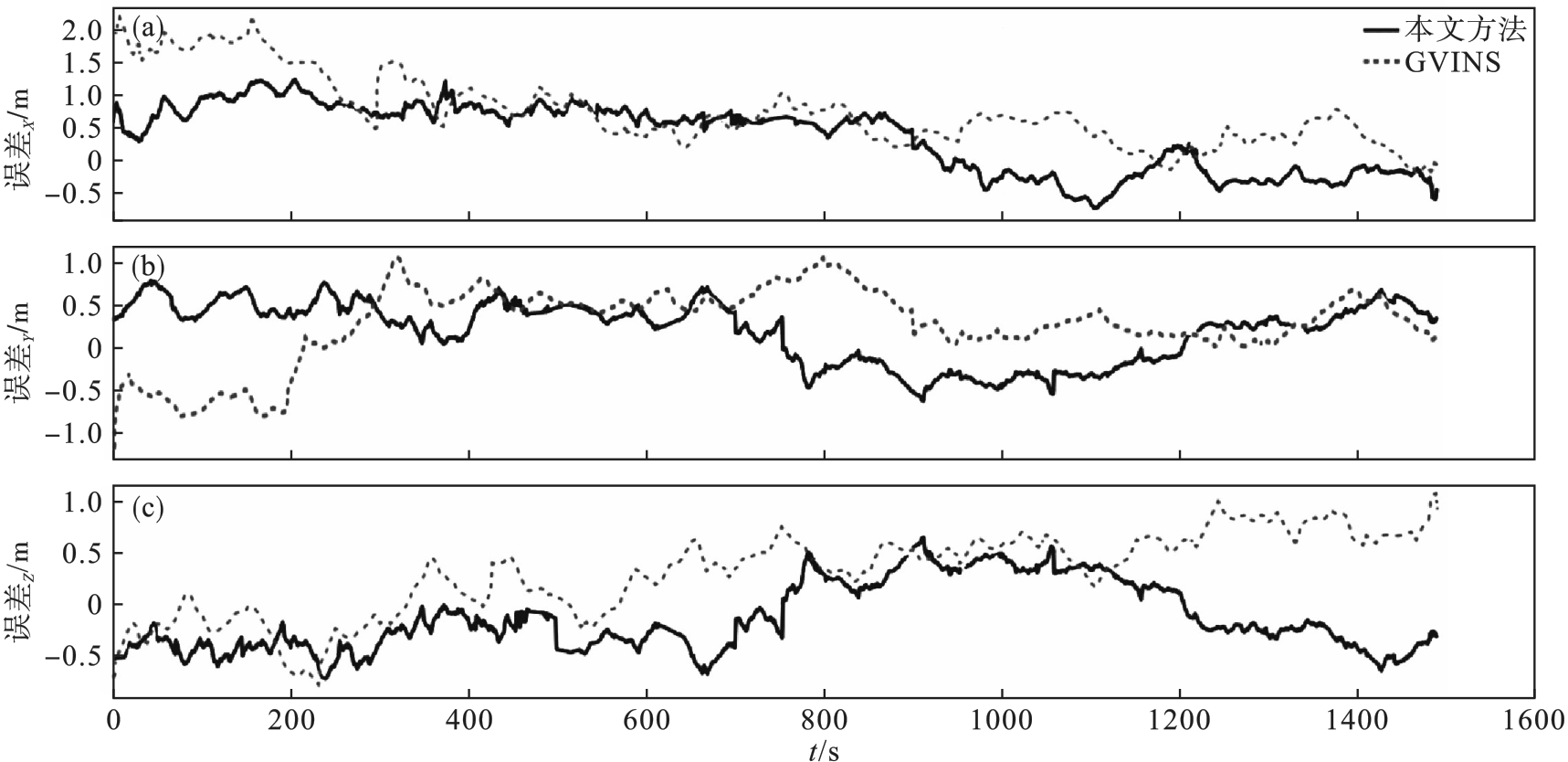
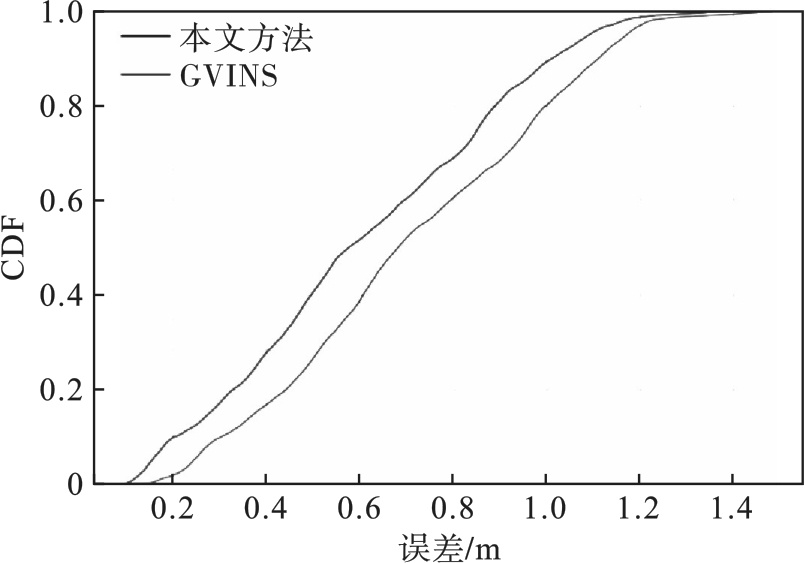
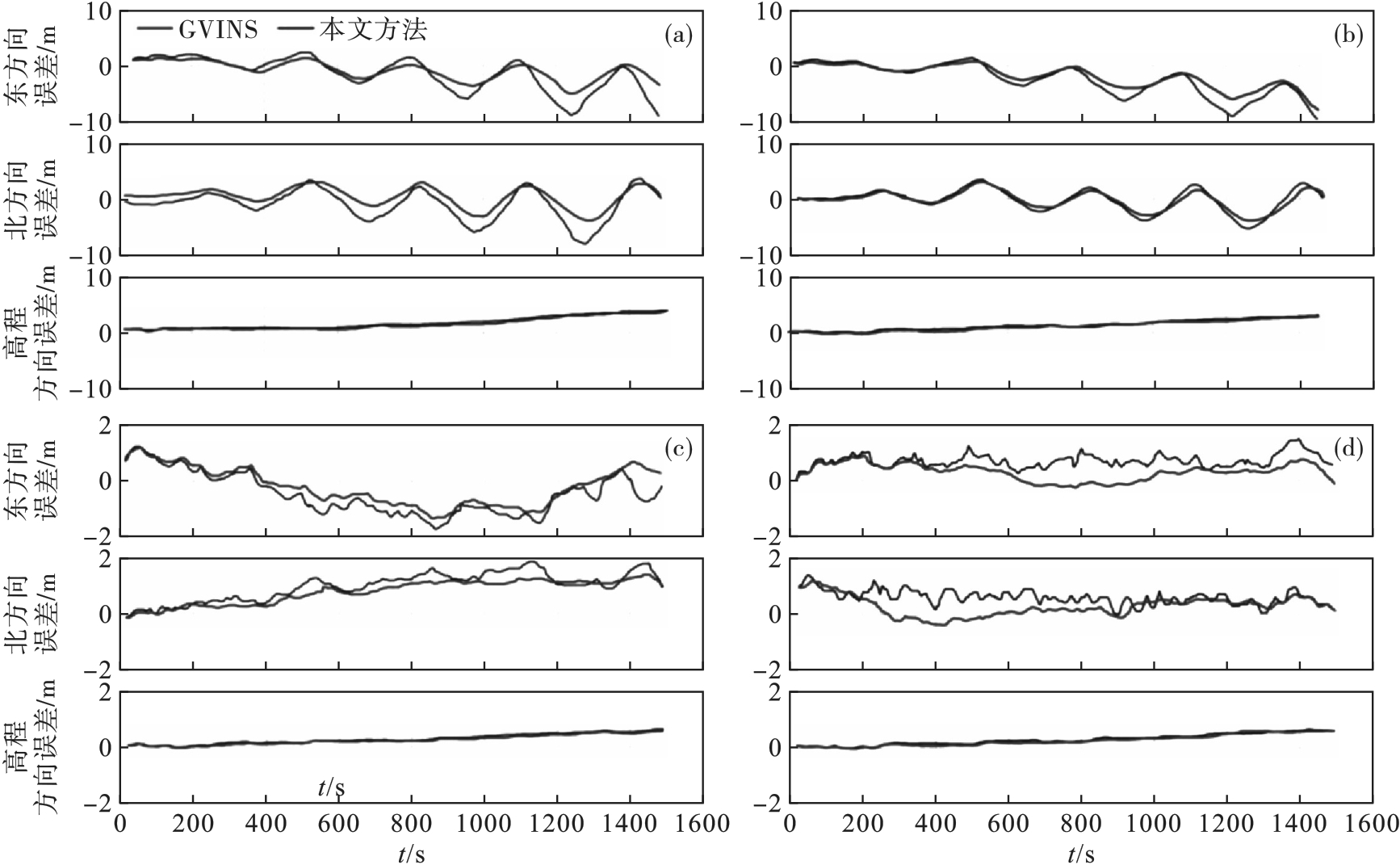
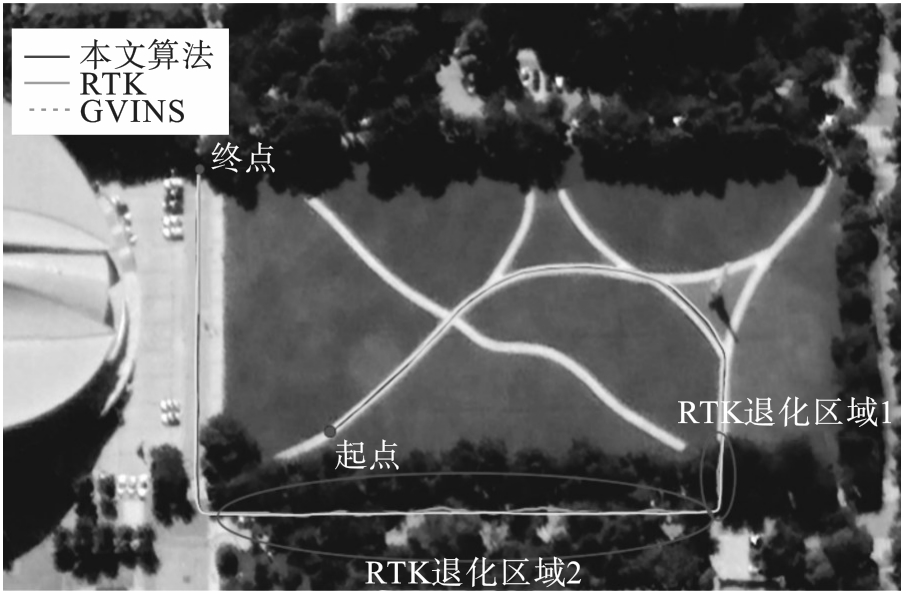
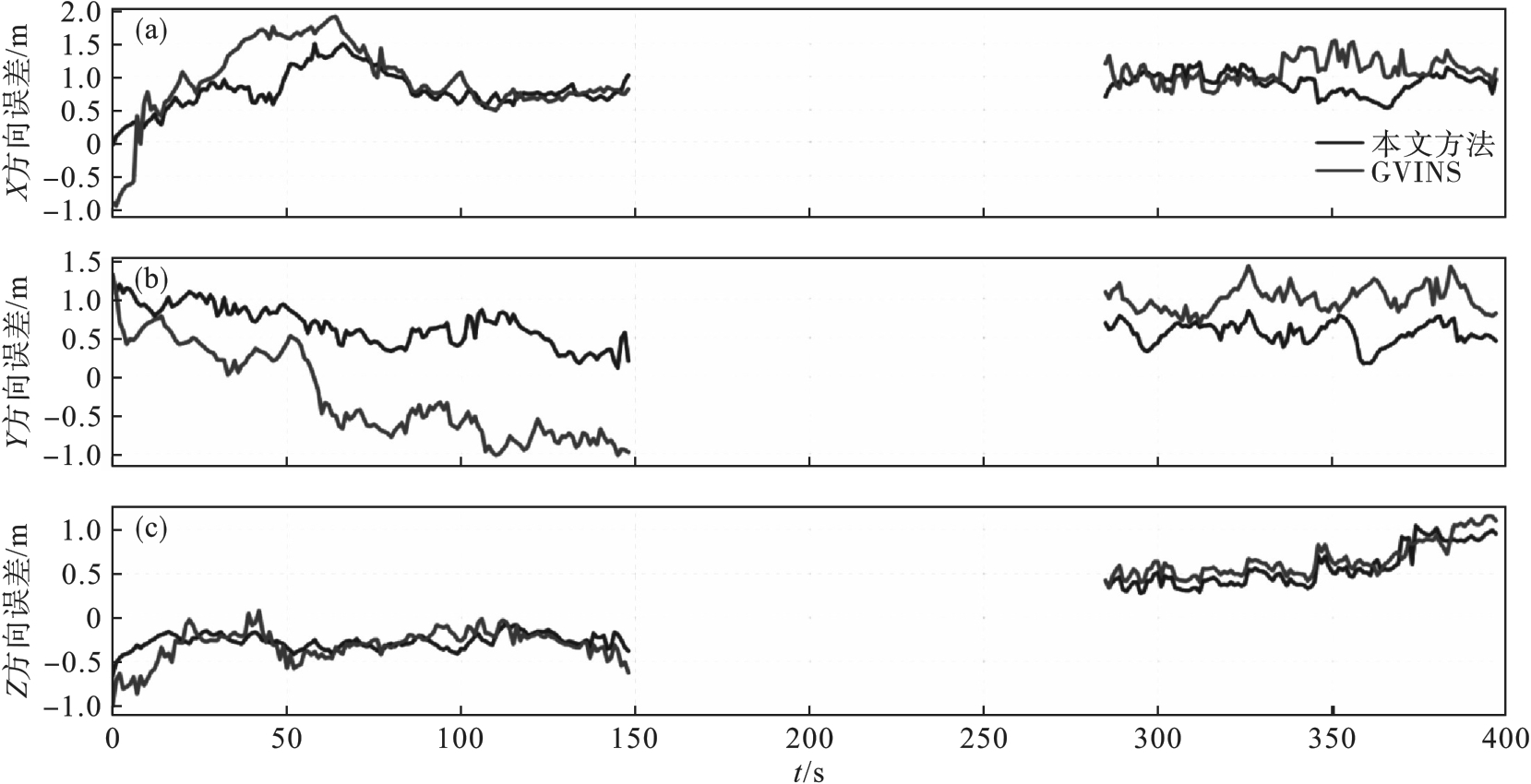
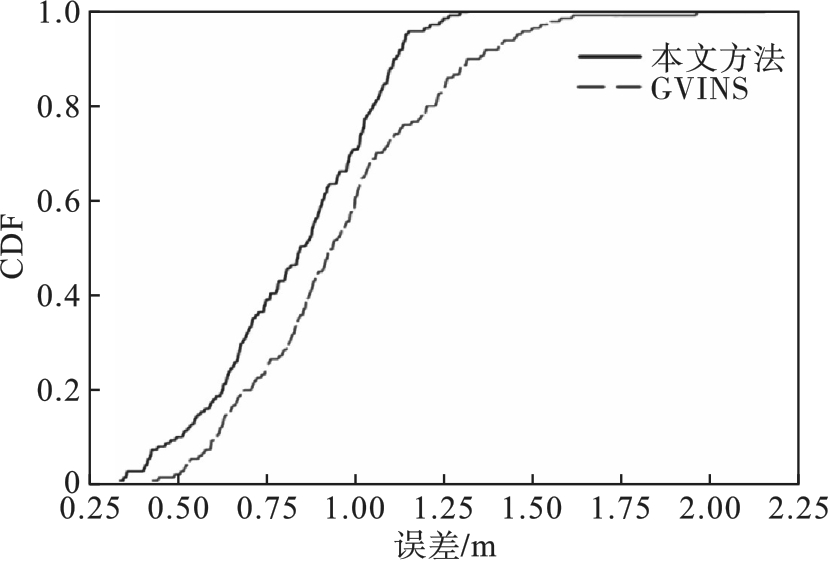
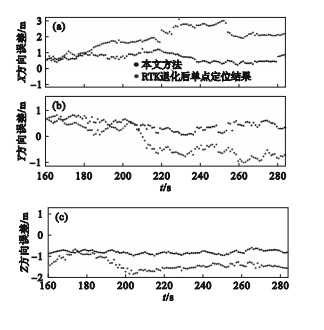
针对复杂环境下单一传感器定位的局限性问题,提出一种多传感器融合的定位方法.在视觉方面,通过在点特征的基础上增加线特征,以克服视觉图像中重复纹理的干扰;在GNSS(global navigation satellite system)方面,通过引入精度更高的载波相位对伪距观测值进行平滑处理,以提高单点定位精度.利用公开数据集和实测数据分别对算法的精度和稳定性进行了验证.结果表明,在公开数据集和实测数据中,所提方法相比于GVINS(视觉-惯性-GNSS紧耦合的算法)在地心地固坐标系下的X,Y,Z 3个方向上,定位精度分别提高了32.2%,23.3%,24.5%和25.7%,25.8%,14.1%.此外,在卫星信号被严重遮挡的环境下,所提方法在一定时间内仍具有良好的定位性能,平面定位精度达到0.74 m,高程定位精度达到0.91 m.研究成果为复杂环境下的多传感器融合定位提供新思路.
中图分类号: