东北大学学报(自然科学版) ›› 2024, Vol. 45 ›› Issue (10): 1443-1451.DOI: 10.12068/j.issn.1005-3026.2024.10.010
• 机械工程 • 上一篇
陈晓明1,2( ), 陈大川1, 赵玉倩1, 李程3
), 陈大川1, 赵玉倩1, 李程3
收稿日期:2023-05-15
出版日期:2024-10-31
发布日期:2024-12-31
通讯作者:
陈晓明
作者简介:陈晓明(1990-),男,河南郑州人,东北大学秦皇岛分校讲师,博士.
基金资助:
Xiao-ming CHEN1,2(), Da-chuan CHEN1, Yu-qian ZHAO1, Cheng LI3
Received:2023-05-15
Online:2024-10-31
Published:2024-12-31
Contact:
Xiao-ming CHEN
About author:CHEN Xiao-ming,E-mail:chenxiaoming@neuq.edu.cn摘要:
环境的污染给海洋生态带来的巨大变化会对人类的生活造成严重的影响,研究仿生机器人实时监测海滩环境能够有效解决该问题.因此,提出了一种绳索驱动柔性骨骼仿生蟹机器人.首先,建立刚柔耦合模型研究柔性足端的运动规律.其次,研究基于手机应用程序(application,APP)的仿生蟹控制方法,并实验研究仿生蟹机器人的响应特性和运动特性.然后,测试仿生蟹在多种沙滩上的越障能力,并同时控制多只仿生蟹以测试手机APP的集群控制性能.最后,利用该机器人实现渤海湾6个海滩环境的监测,并捕捉海滩环境图像和参数.该仿生蟹机器人的研究为海滩环境监测提供了一种有效的方法.
中图分类号:
陈晓明, 陈大川, 赵玉倩, 李程. 面向海滩环境监测的绳驱柔性骨骼仿生蟹机器人[J]. 东北大学学报(自然科学版), 2024, 45(10): 1443-1451.
Xiao-ming CHEN, Da-chuan CHEN, Yu-qian ZHAO, Cheng LI. Cable-Driven Flexoskeleton Bionic Crab Robots for Beach Environmental Monitoring[J]. Journal of Northeastern University(Natural Science), 2024, 45(10): 1443-1451.

图1 平面梁单元模型
Fig.1 Plane beam element model
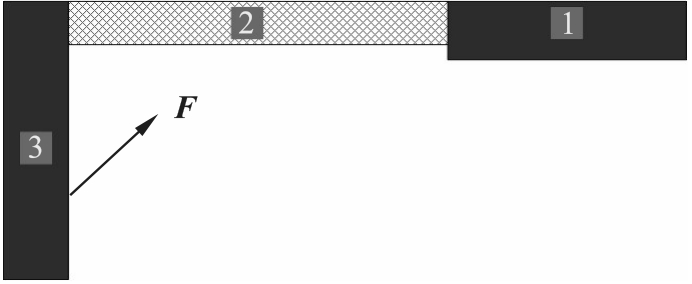
图2 仿生蟹机器人足端变形仿真模型示意图
Fig.2 Schematic diagram of the bionic crab robot foot end transformation simulation model
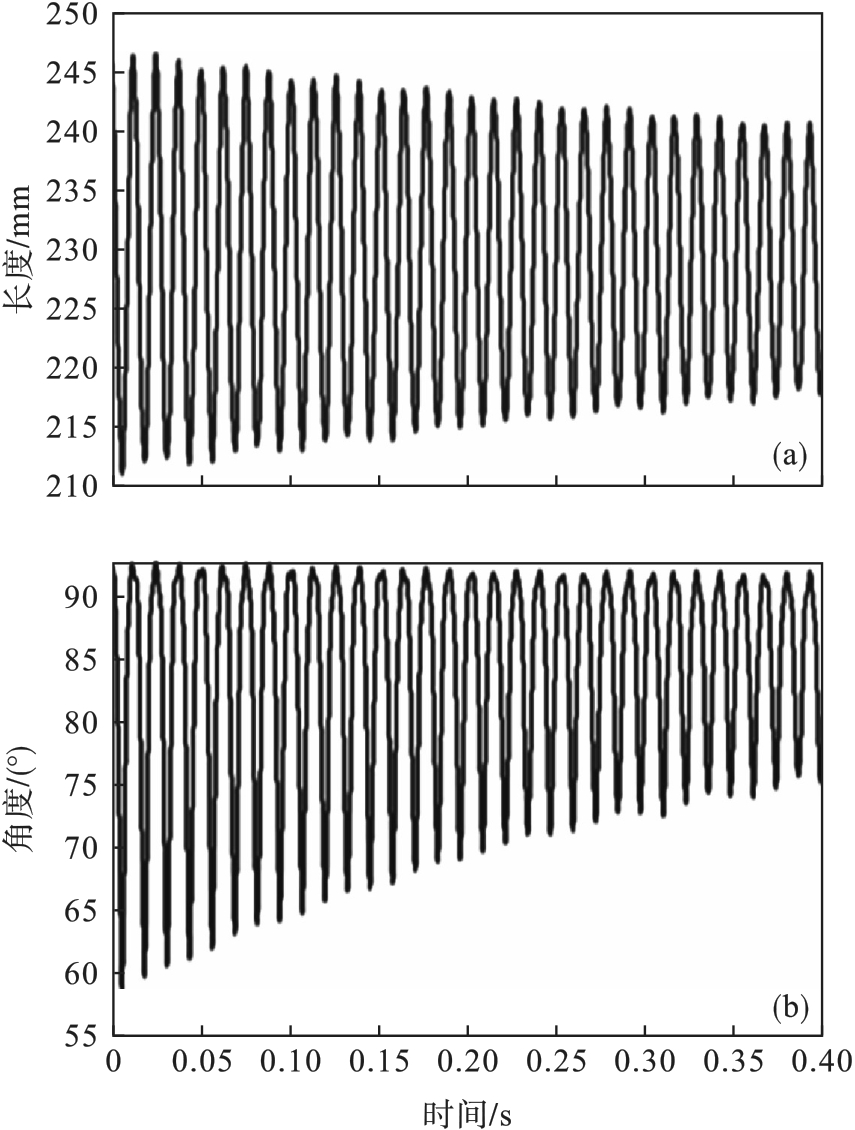
图3 仿生蟹机器人足端变形数值仿真结果(a)—足端变形量随时间的变化规律;(b)—足端弯曲角度随时间的变化规律.
Fig.3 Numerical simulation results of the bionic crab robot foot end transformation
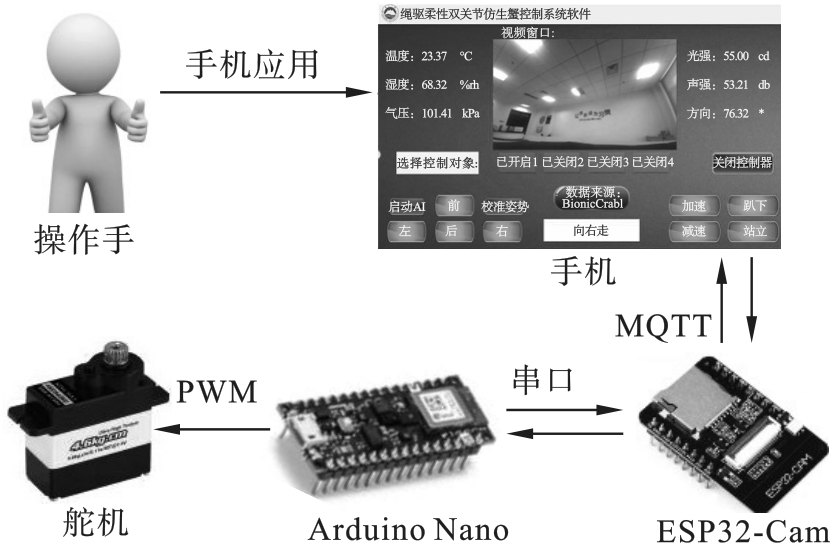
图4 仿生蟹机器人控制系统
Fig.4 Control system of the bionic crab robot
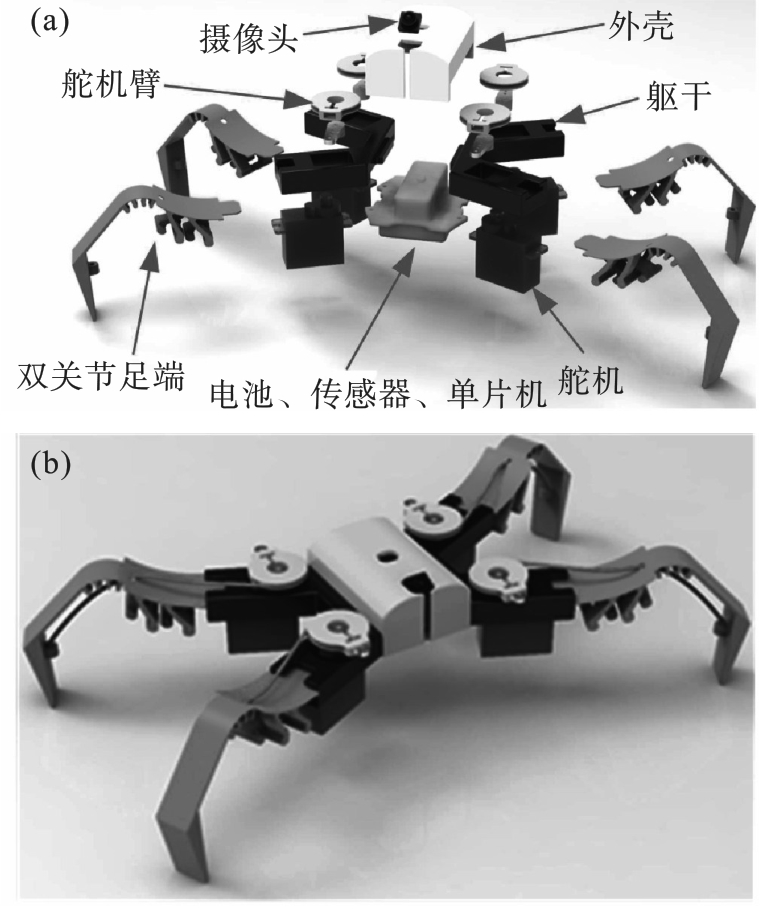
图5 仿生蟹机器人设计实物图(a)—仿生蟹机器人零件图; (b)—仿生蟹机器人装配图.
Fig.5 Rear object image of the designed bionic crab robot
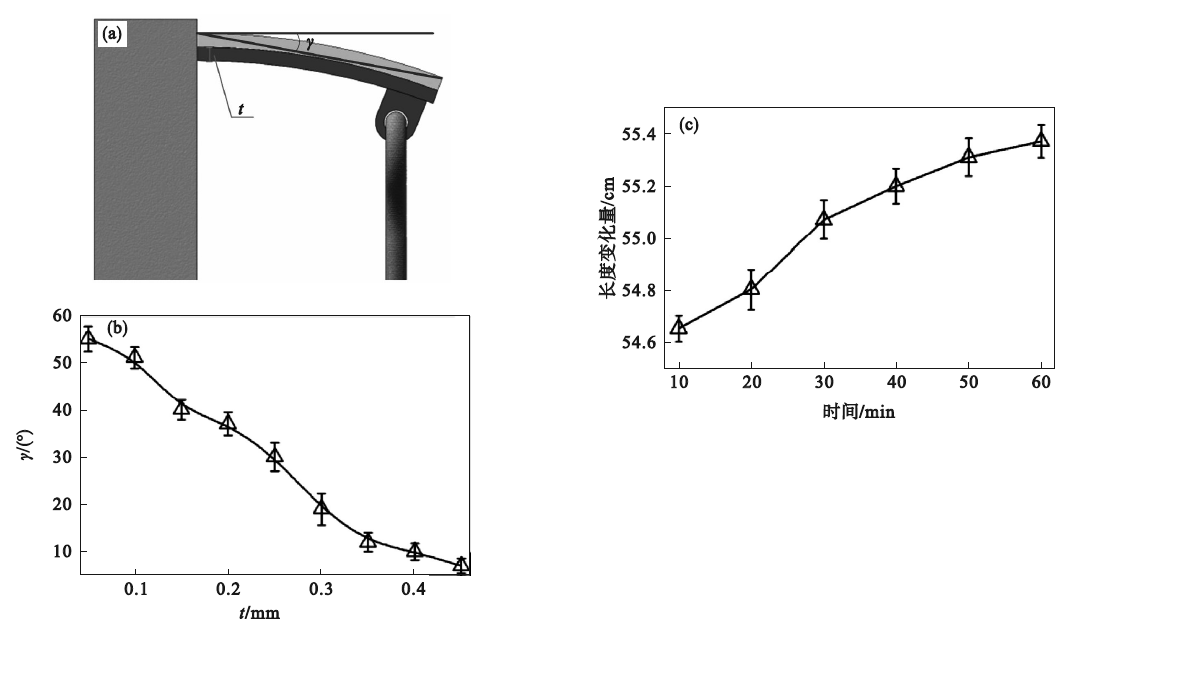
图6 仿生蟹机器人的测试(a) —测试装置; (b)—足端厚度与弯曲角度的关系;(c)—绳索长度随时间的变化规律.
Fig.6 Testing of the bionic crab robot
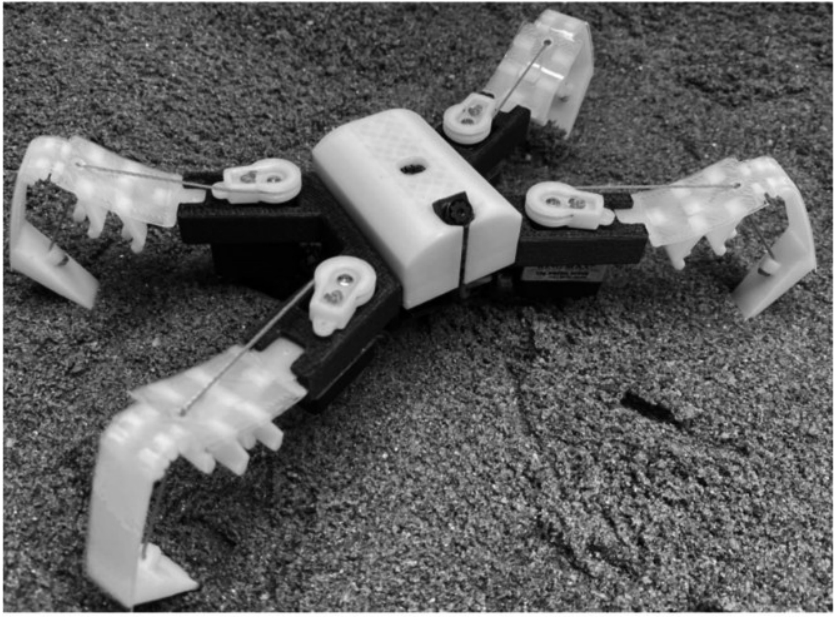
图7 仿生蟹机器人的组装
Fig.7 Assembly of the bionic crab robot
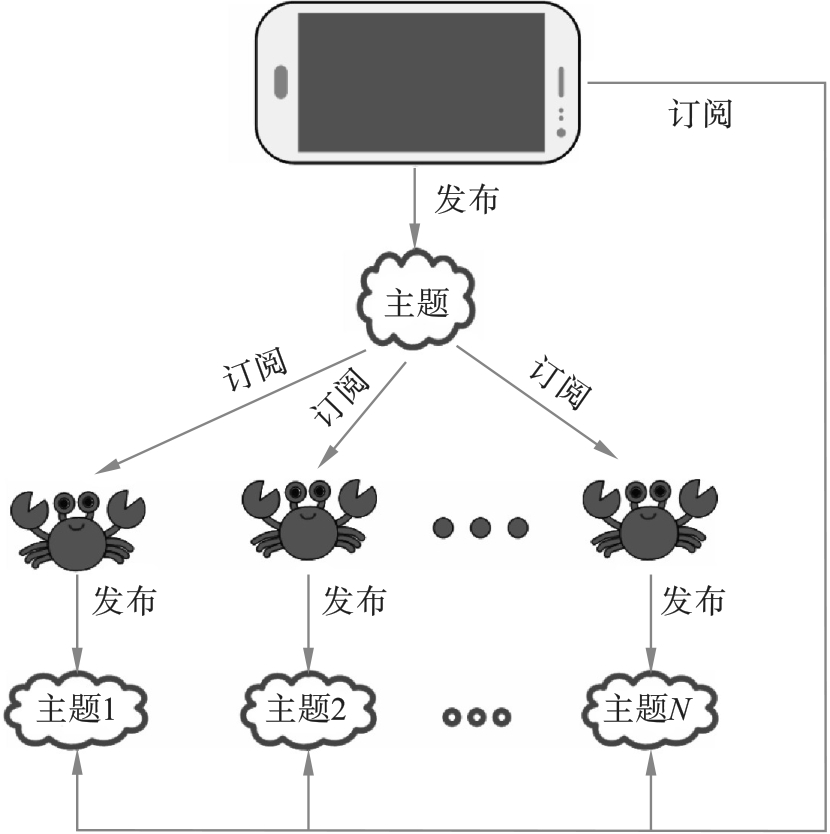
图8 手机APP的控制原理
Fig.8 Control principle of the mobile phone APP
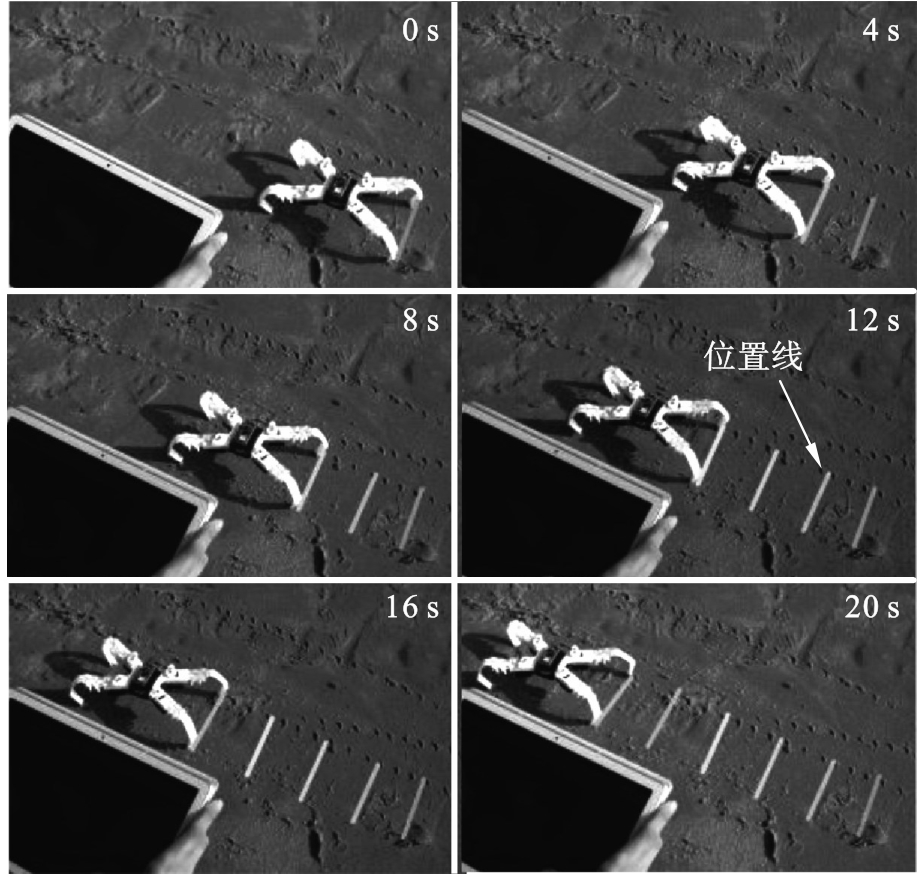
图9 短距离控制时仿生蟹机器人的运动
Fig.9 Motion of the bionic crab robot in the case of short range control
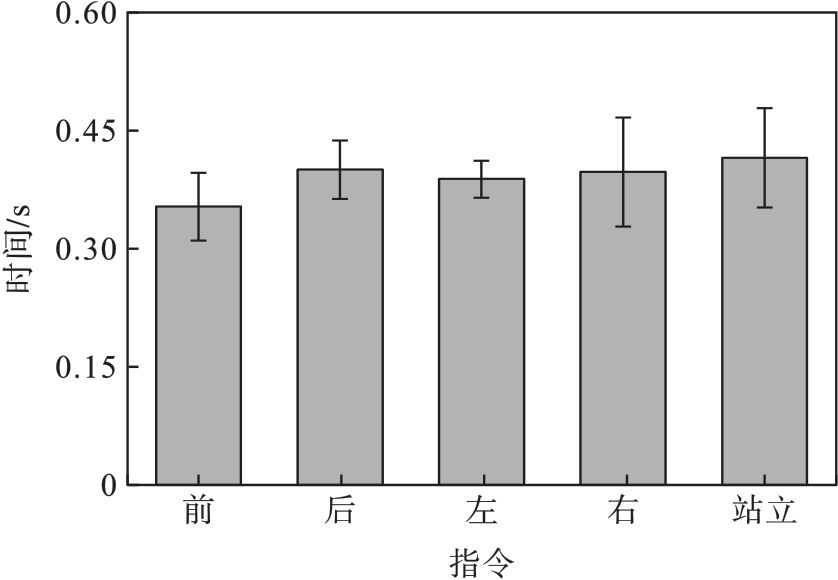
图10 仿生蟹机器人的响应时间
Fig.10 Response time of the bionic crab robot
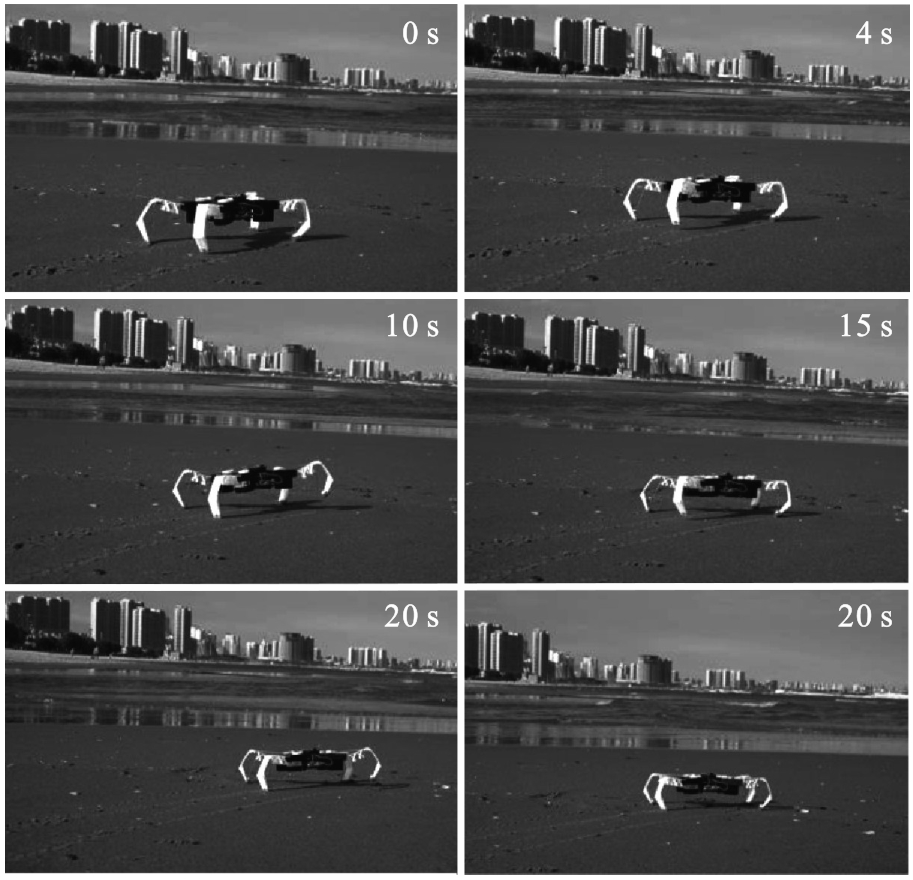
图11 远距离控制下仿生蟹机器人的运动
Fig.11 Motion of the bioniic crab in the case of long range control
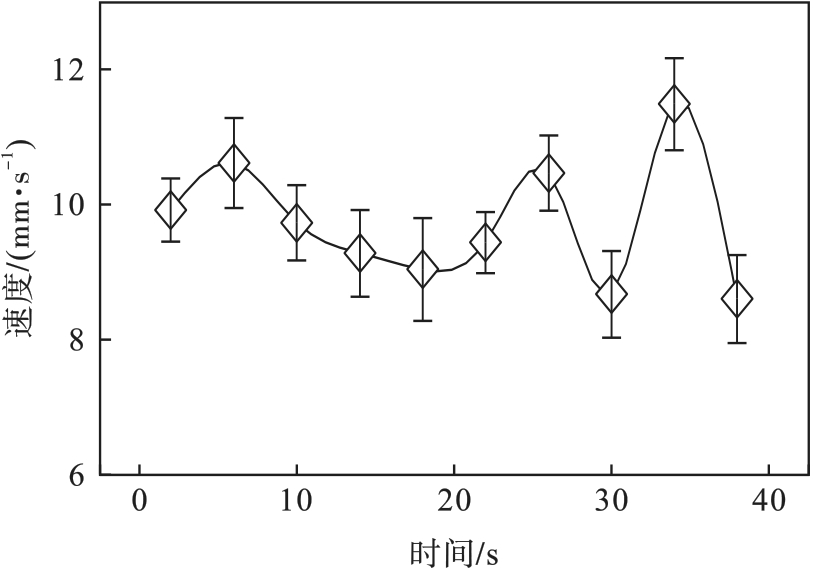
图12 仿生蟹机器人运动速度随着时间的变化
Fig.12 Change in speed of the bionic crab robot over time

图13 仿生蟹机器人在松软崎岖海滩上的运动
Fig.13 Motion of the bioniic crab robot on soft and rugged beach
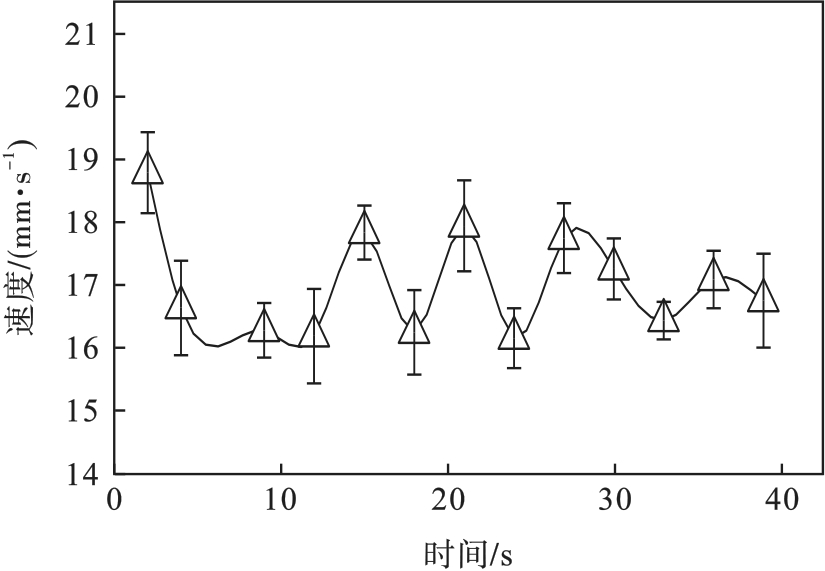
图14 仿生蟹机器人在松软崎岖海滩上的运动速度与时间的关系
Fig.14 Relationship between the speed and time of the bionic crab robot on soft and rugged beach
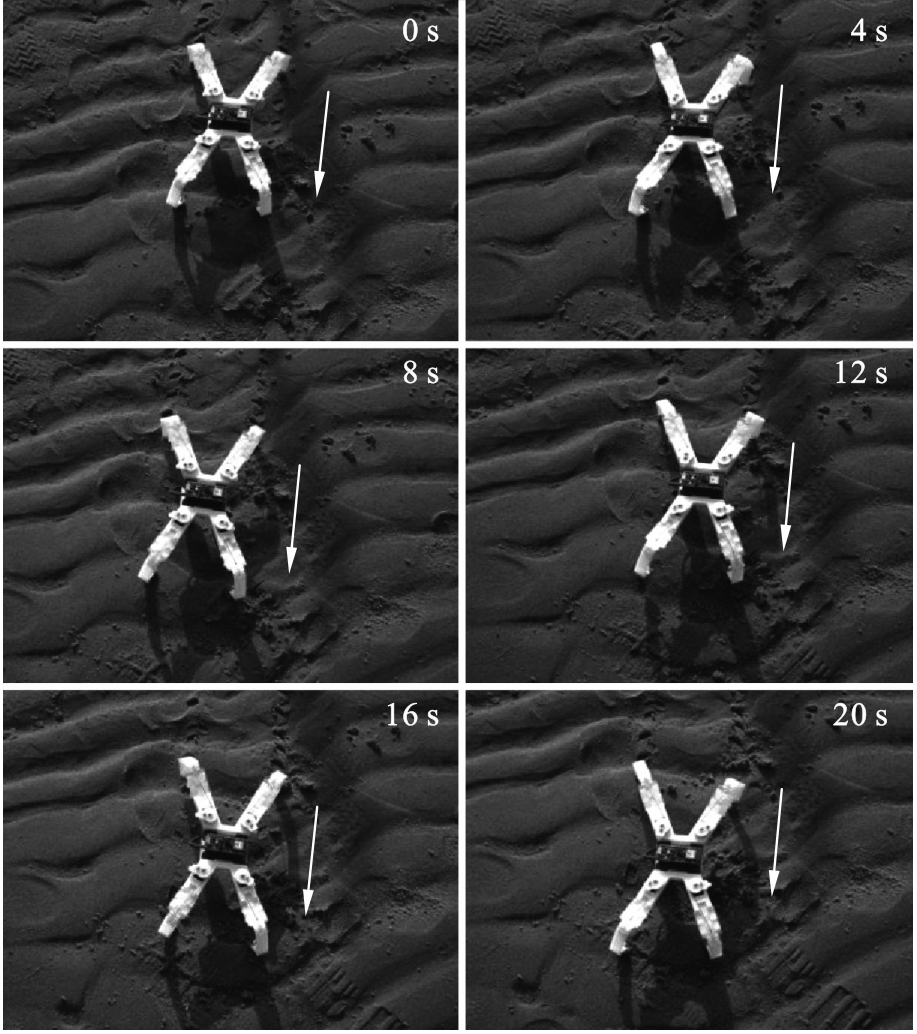
图15 仿生蟹机器人在板硬崎岖海滩上的运动
Fig.15 Motion of the bionic crab robot on harden and rugged beach
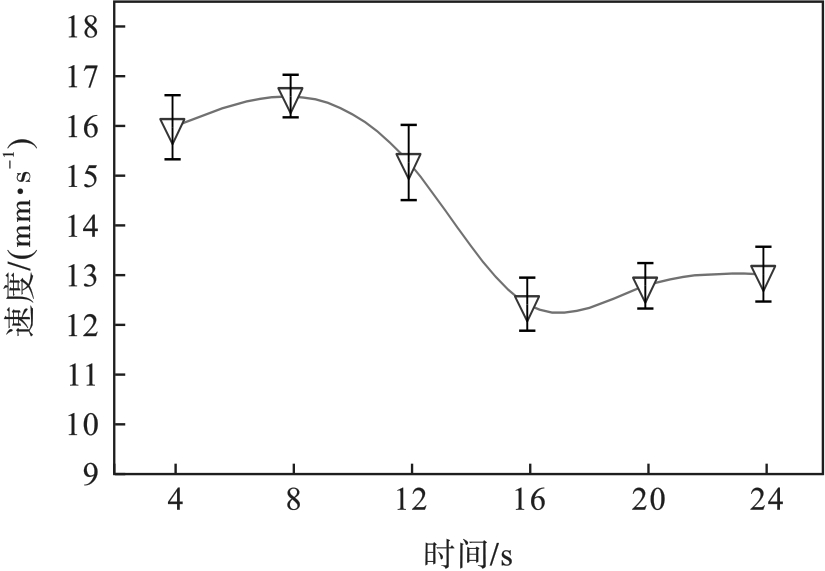
图16 仿生蟹机器人在板硬崎岖海滩上的运动速度与时间的关系
Fig.16 Relationship between the speed and time of the bionic crab robot on harden and rugged beach

图17 两只仿生蟹机器人的控制(a)~(c)—两只仿生蟹机器人运动;(d)—运动速度随时间变化.
Fig.17 Control of two bionic crab robots
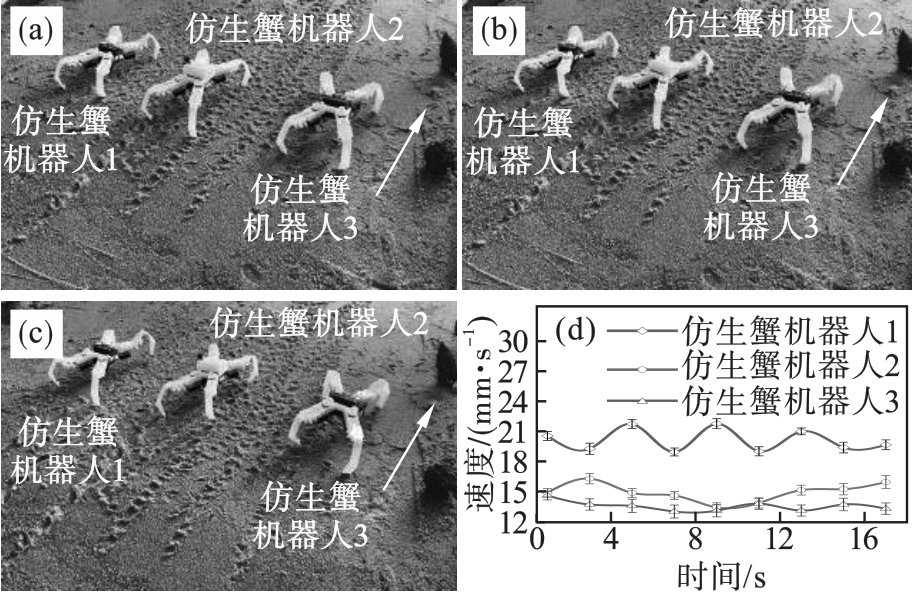
图18 3只仿生蟹机器人的控制(a)~(c)—3只仿生蟹机器人运动;(d)—运动速度随时间变化.
Fig.18 Control of three bionic crab robots
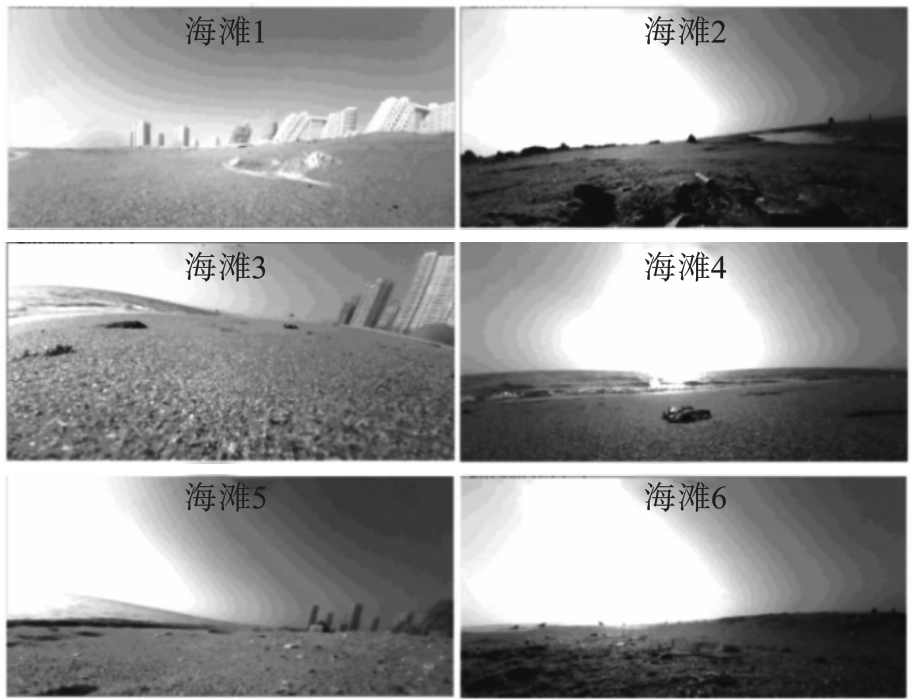
图19 海滩环境图片的实时采集
Fig.19 Real time collection of beach environment images
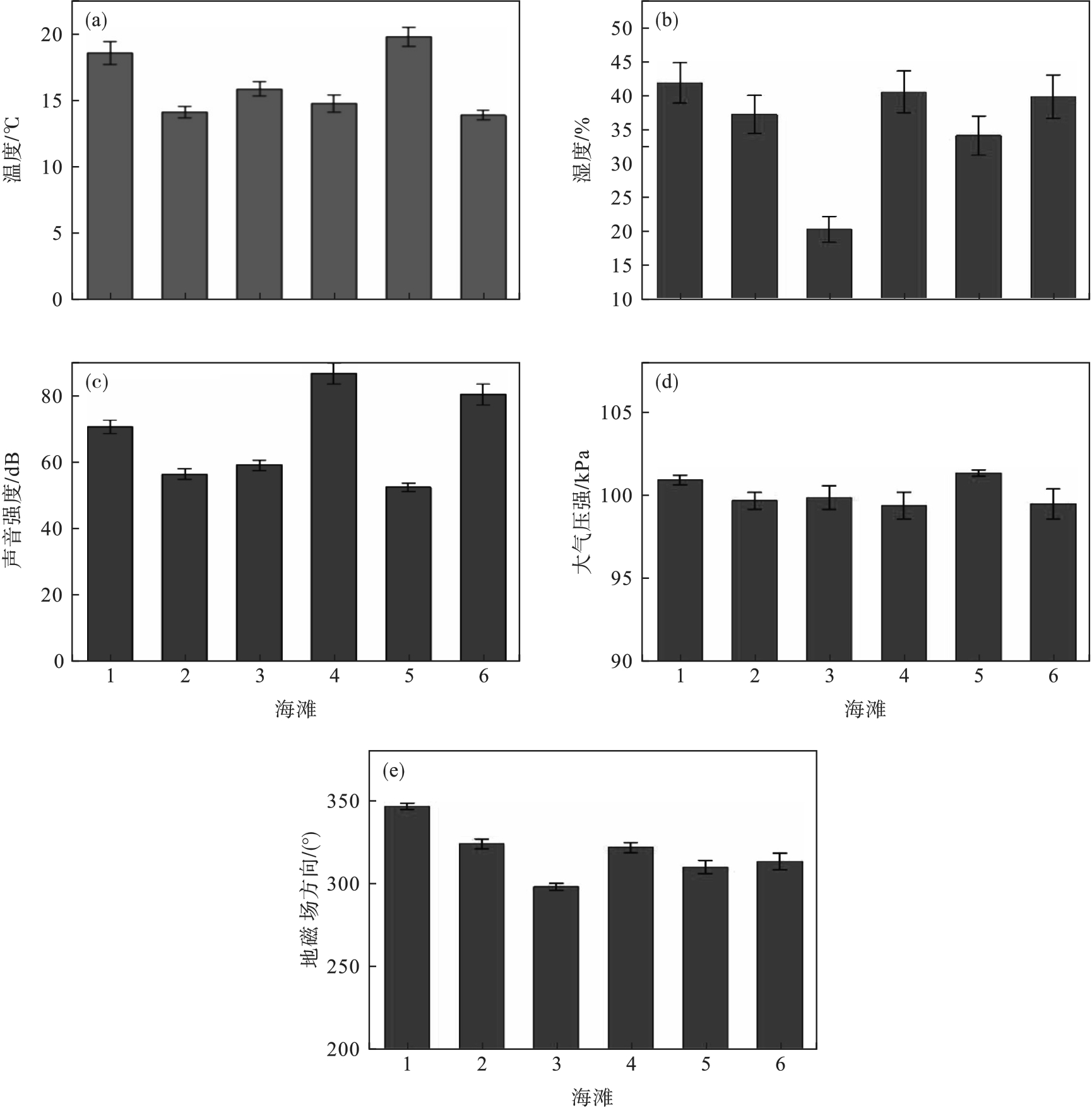
图20 海滩多种环境参数的采集(a)—温度; (b)—湿度; (c)—声音强度; (d)—压强;(e)—地磁场方向.
Fig.20 Collection of various environmental parameters in beachs
| 1 | Chen X M, Ren Y K, Jiang T Y,et al.Characterization of particle movement and high‑resolution separation of microalgal cells via induced‑charge electroosmotic advective spiral flow[J].Analytical Chemistry,2021,93(3):1667-1676. |
| 2 | Danovaro R, Fanelli E, Aguzzi J,et al.Ecological variables for developing a global deep‑ocean monitoring and conservation strategy[J].Nature Ecology & Evolution,2020,4(2):181-192. |
| 3 | Chen X M, Shen M, Liu S,et al.Microfluidic impedance cytometry with flat‑end cylindrical electrodes for accurate and fast analysis of marine microalgae[J].Lab on a Chip,2024,24(7):2058-2068. |
| 4 | Galland G, Harrould‑Kolieb E, Herr D.The ocean and climate change policy[J].Climate Policy,2012,12(6):764-771. |
| 5 | Rajasekaran L, Santhanam S M.Optimum frequency selection for localization of underwater AUV using dynamic positioning parameters[J].Microsystem Technologies,2021,27(12):4291-4303. |
| 6 | He Y L, Zhu L Q, Sun G K,et al.Underwater motion characteristics evaluation of multi amphibious spherical robots[J].Microsystem Technologies,2019,25(2):499-508. |
| 7 | Nguyen D N, Ho N L, Dao T P,et al.Multi‑objective optimization design for a sand crab‑inspired compliant microgripper[J].Microsystem Technologies,2019,25(10):3991-4009. |
| 8 | Zheng L, Piao Y, Ma Y K,et al.Development and control of articulated amphibious spherical robot[J].Microsystem Technologies,2020,26(5):1553-1561. |
| 9 | Chang H, Chang J, Clifton G,et al.Anisotropic compliance of robot legs improves recovery from swing‑phase collisions[J].Bioinspiration & Biomimetics,2021,16(5):056001. |
| 10 | Boxerbaum A S, Bachmann R J, Quinn R D,et al.Design and testing of a highly mobile insect‑inspired autonomous robot in a beach environment[J].International Journal of Design & Nature and Ecodynamics,2010,4(4):319-336. |
| 11 | De Waard M, Inja M, Visser A.Analysis of flat terrain for the atlas robot[C]//2013 3rd Joint Conference of AI & Robotics and 5th RoboCup Iran Open International Symposium.Tehran,2013:1-6. |
| 12 | Branyan C, Hatton R L, Mengüç Y.Snake‑inspired kirigami skin for lateral undulation of a soft snake robot[J].IEEE Robotics and Automation Letters,2020,5(2):1728-1733. |
| 13 | Estremera J, Cobano J A, Gonzalez de Santos P.Continuous free‑crab gaits for hexapod robots on a natural terrain with forbidden zones:an application to humanitarian demining[J].Robotics and Autonomous Systems,2010,58(5):700-711. |
| 14 | Graf N M, Daltorio K A.Get a grip:inward dactyl motions improve efficiency of sideways‑walking gait for an amphibious crab‑like robot[J].Bioinspiration & Biomimetics,2022,17(6):066008. |
| 15 | Wang L Q, Liu D F, Chen D L,et al.The virtual prototype design and simulation of amphibious bio‑crab robot with variable posture[C]//2009 IEEE International Conference on Robotics and Biomimetics (ROBIO).Guilin,2009:2140-2145. |
| 16 | Grezmak J, Graf N, Behr A,et al.Terrain classification based on sensed leg compliance for amphibious crab robot[J].IEEE Sensors Journal,2021,21(20):23308-23316. |
| 17 | Billah M M, Ahmed M, Farhana S.Walking hexapod robot in disaster recovery:developing algorithm for terrain negotiation and navigation[J].World Academy of Science,Engineering and Technology International Journal of Mechanical and Mechatronics Engineering,2008,2(6):795-800. |
| 18 | Greiner H, Shectman A, Won C,et al.Autonomous legged underwater vehicles for near land warfare[C]//Proceedings of Symposium on Autonomous Underwater Vehicle Technology.Monterey:IEEE,1996:41-48. |
| 19 | Jiang M S, Song R, Gravish N.Knuckles that buckle:compliant underactuated limbs with joint hysteresis enable minimalist terrestrial robots[C]//2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS).Las Vegas,2020:3732-3738. |
| 20 | Chen X M, Liu S, Shen M,et al.Dielectrophoretic characterization and selection of non‑spherical flagellate algae in parallel channels with right‑angle bipolar electrodes[J].Lab on a Chip,2024,24(9):2506-2517. |
| 21 | Jiang M S, Zhou Z Y, Gravish N.Flexoskeleton printing enables versatile fabrication of hybrid soft and rigid robots[J].Soft Robotics,2020,7(6):770-778. |
| 22 | Xu M, Wang G, Rong C.Fiber‑reinforced flexible joint actuator for soft arthropod robots[J].Sensors and Actuators A:Physical,2022,340:113522. |
| 23 | Kim B, Lee M G, Lee Y P,et al.An earthworm‑like micro robot using shape memory alloy actuator[J].Sensors and Actuators A:Physical,2006,125(2):429-437. |
| 24 | Chang L F, Liu Y F, Yang Q,et al.Ionic electroactive polymers used in bionic robots:a review[J].Journal of Bionic Engineering,2018,15(5):765-782. |
| 25 | Jin X, Cui X, Agrawal S K.Design of a cable‑driven active leg exoskeleton (C-ALEX) and gait training experiments with human subjects[C]//2015 IEEE International Conference on Robotics and Automation (ICRA).Seattle,2015:5578-5583. |
| 26 | Wehner M, Quinlivan B, Aubin P M,et al.A lightweight soft exosuit for gait assistance[C]//2013 IEEE International Conference on Robotics and Automation.Karlsruhe,2013:3362-3369. |
| 27 | Lv P F, Yang X, Bisoyi H K,et al.Stimulus‑driven liquid metal and liquid crystal network actuators for programmable soft robotics[J].Materials Horizons,2021,8(9):2475-2484. |
| 28 | Ren J, Wu F, Shang E W,et al.3D printed smart elastomeric foam with force sensing and its integration with robotic gripper[J].Sensors and Actuators A:Physical,2023,349:113998. |
| 29 | Gueners D, Chanal H, Bouzgarrou B C.Design and implementation of a cable‑driven parallel robot for additive manufacturing applications[J].Mechatronics,2022,86:102874. |
| 30 | Jin X, Prado A, Agrawal S K.Retraining of human gait‑are lightweight cable‑driven leg exoskeleton designs effective?[J].IEEE Transactions on Neural Systems and Rehabilitation Engineering,2018,26(4):847-855. |
| [1] | 单泉, 张顺, 黄建聪, 陈砚. 上肢康复机器人模糊自适应交互控制研究[J]. 东北大学学报(自然科学版), 2024, 45(7): 974-983. |
| [2] | 吴昊, 梁忠超, 王文成, 王永富. 具有不确定滑转的轮式移动机器人轨迹跟踪控制方法[J]. 东北大学学报(自然科学版), 2024, 45(6): 858-865. |
| [3] | 陆志国, 王逍. 基于B样条与鲸鱼优化算法的机械臂轨迹规划[J]. 东北大学学报(自然科学版), 2024, 45(5): 683-689. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||