东北大学学报(自然科学版) ›› 2024, Vol. 45 ›› Issue (6): 858-865.DOI: 10.12068/j.issn.1005-3026.2024.06.014
• 机械工程 • 上一篇
吴昊, 梁忠超( ), 王文成, 王永富
), 王文成, 王永富
收稿日期:2023-05-29
出版日期:2024-06-15
发布日期:2024-09-18
通讯作者:
梁忠超
作者简介:吴 昊(1999-),男,安徽滁州人,东北大学硕士研究生基金资助:
Hao WU, Zhong-chao LIANG(), Wen-cheng WANG, Yong-fu WANG
Received:2023-05-29
Online:2024-06-15
Published:2024-09-18
Contact:
Zhong-chao LIANG
About author:LIANG Zhong-chao, E-mail: liangzc@me.neu.edu.cn摘要:
轮式移动机器人在松软复杂地形条件下容易发生车轮滑转,影响轨迹跟踪精度.为提高机器人在该情况下的轨迹跟踪准确性,提出了一种基于容错控制的自适应滑转补偿控制器.首先,考虑车轮滑转率建立了四轮移动机器人运动学模型,并构建了相应的轨迹跟踪误差模型;然后,根据容错控制方法设计了滑转补偿项,并基于Lyapunov稳定性理论证明了自适应滑转补偿控制器的稳定性,实现了对由车轮滑转引起的速度误差的准确补偿;最后,利用四轮移动机器人进行了两种工况下的实验验证.结果表明,设计的控制器能够使移动机器人在未知的车轮滑转率条件下准确跟踪理想路径,并且相较于常规控制器有更强的鲁棒性和更高的跟踪精度.
中图分类号:
吴昊, 梁忠超, 王文成, 王永富. 具有不确定滑转的轮式移动机器人轨迹跟踪控制方法[J]. 东北大学学报(自然科学版), 2024, 45(6): 858-865.
Hao WU, Zhong-chao LIANG, Wen-cheng WANG, Yong-fu WANG. Trajectory Tracking Control Method of Wheeled Mobile Robot with Uncertain Slippage[J]. Journal of Northeastern University(Natural Science), 2024, 45(6): 858-865.
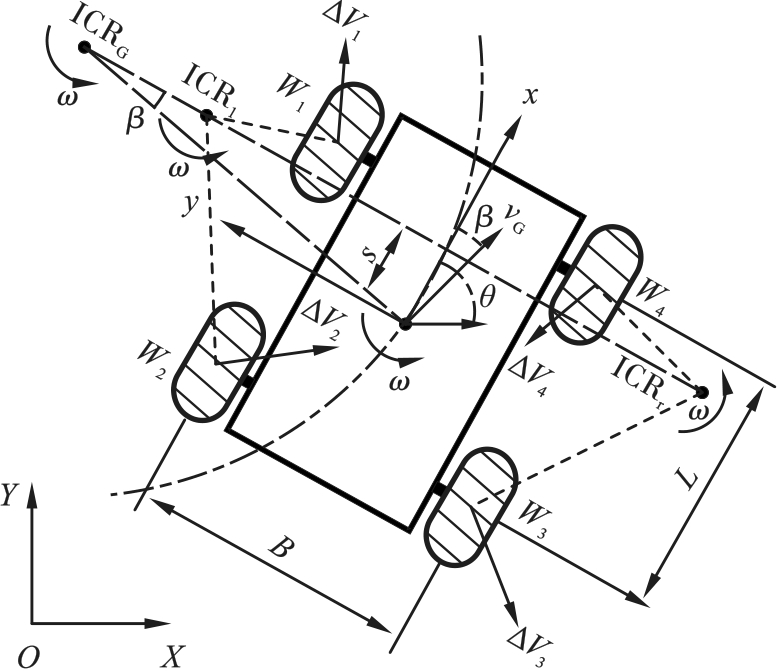
图1 四轮移动机器人运动学模型
Fig. 1 Kinematics model of four?wheeled mobile robot
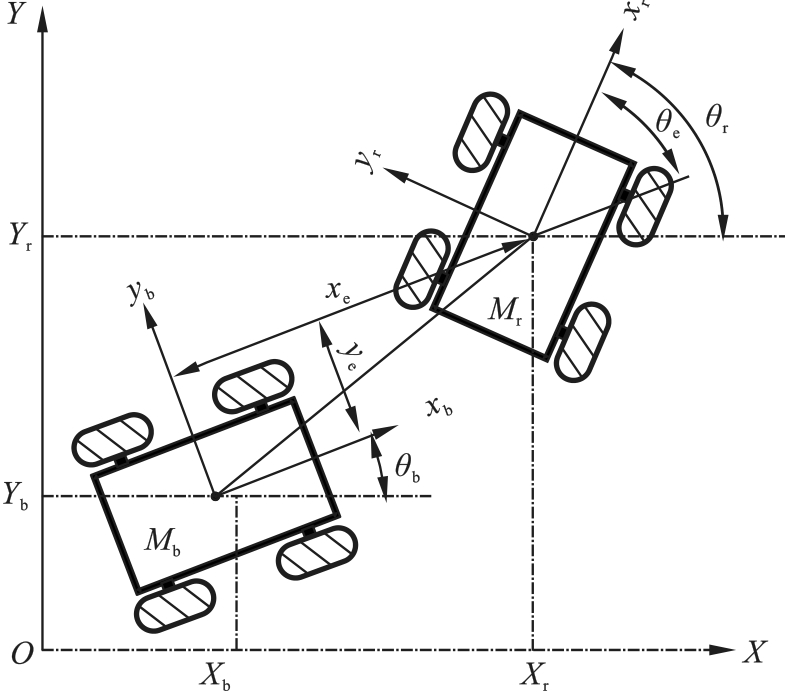
图2 轨迹跟踪模型
Fig. 2 Trajectory tracking model
| 参数 | 数值 | 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|---|---|
| k1 | 0.01 | p3 | 0.1 | b | 0.3 |
| k2 | 0.8 | p4 | 0.1 | r | 0.1 |
| k3 | 0.01 | p5 | 0.1 | vr | 0.3 |
| p1 | 5 | λ1 | 0.3 | ωr | 0.1 |
| p2 | 2 | λ4 | 0.8 | — | — |
表1 仿真控制器参数
Table 1 Simulink controller parameters
| 参数 | 数值 | 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|---|---|
| k1 | 0.01 | p3 | 0.1 | b | 0.3 |
| k2 | 0.8 | p4 | 0.1 | r | 0.1 |
| k3 | 0.01 | p5 | 0.1 | vr | 0.3 |
| p1 | 5 | λ1 | 0.3 | ωr | 0.1 |
| p2 | 2 | λ4 | 0.8 | — | — |
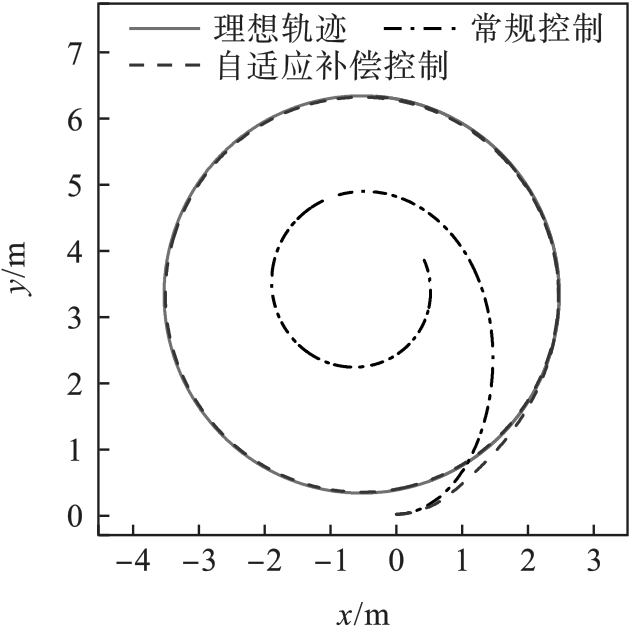
图3 轨迹跟踪结果对比
Fig. 3 Comparison of trajectory tracking results
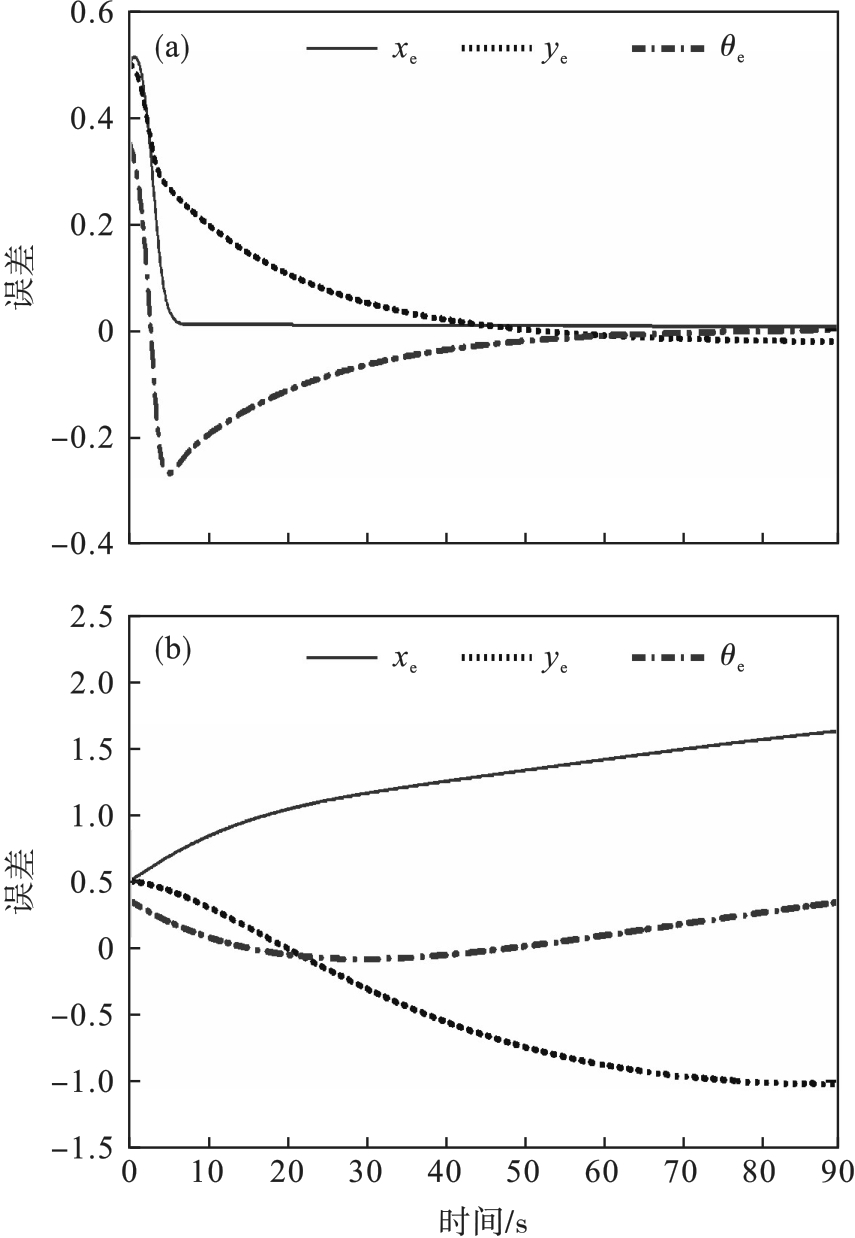
图4 轨迹跟踪误差对比(a)—自适应滑转补偿控制器误差收敛效果;(b)—常规控制器误差收敛效果.
Fig. 4 Comparison of trajectory tracking errors
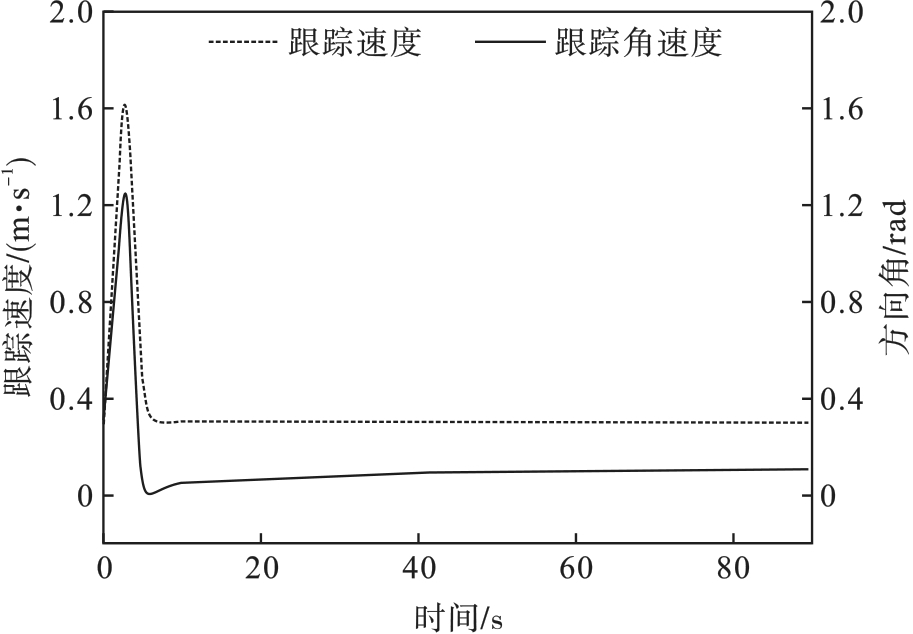
图5 跟踪速度和角速度
Fig. 5 Tracking speed and angular velocity
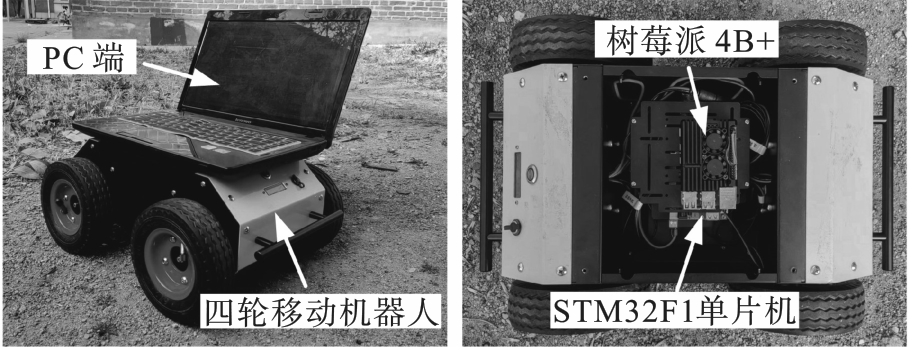
图6 四轮移动机器人实验平台
Fig. 6 Four?wheel mobile robot experimental platform
| 参数 | 数值 | 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|---|---|
| k1 | 0.1 | p2 | 1.2 | λ1 | 1.85 |
| k2 | 0.2 | p3 | 0.05 | λ4 | 3.25 |
| k3 | 0.1 | p4 | 0.05 | vr | 0.3 |
| p1 | 0.02 | p5 | 0.02 | ωr | 0.1 |
表2 控制器参数
Table 2 Controller parameters
| 参数 | 数值 | 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|---|---|
| k1 | 0.1 | p2 | 1.2 | λ1 | 1.85 |
| k2 | 0.2 | p3 | 0.05 | λ4 | 3.25 |
| k3 | 0.1 | p4 | 0.05 | vr | 0.3 |
| p1 | 0.02 | p5 | 0.02 | ωr | 0.1 |
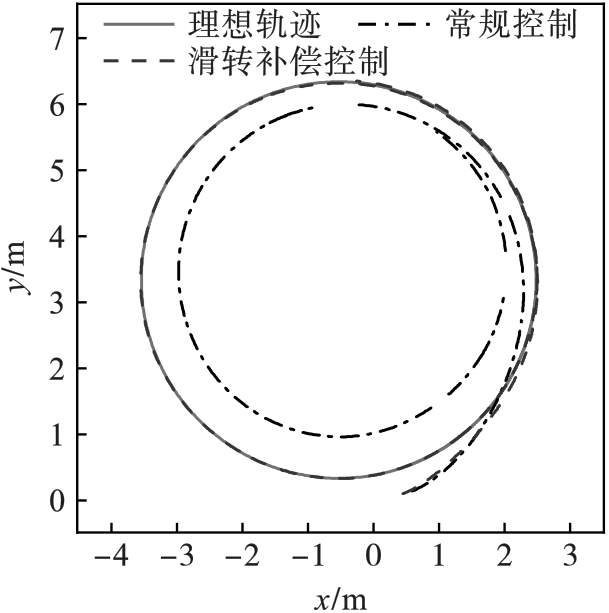
图7 圆形轨迹跟踪结果对比
Fig. 7 Comparison of circular trajectory tracking results
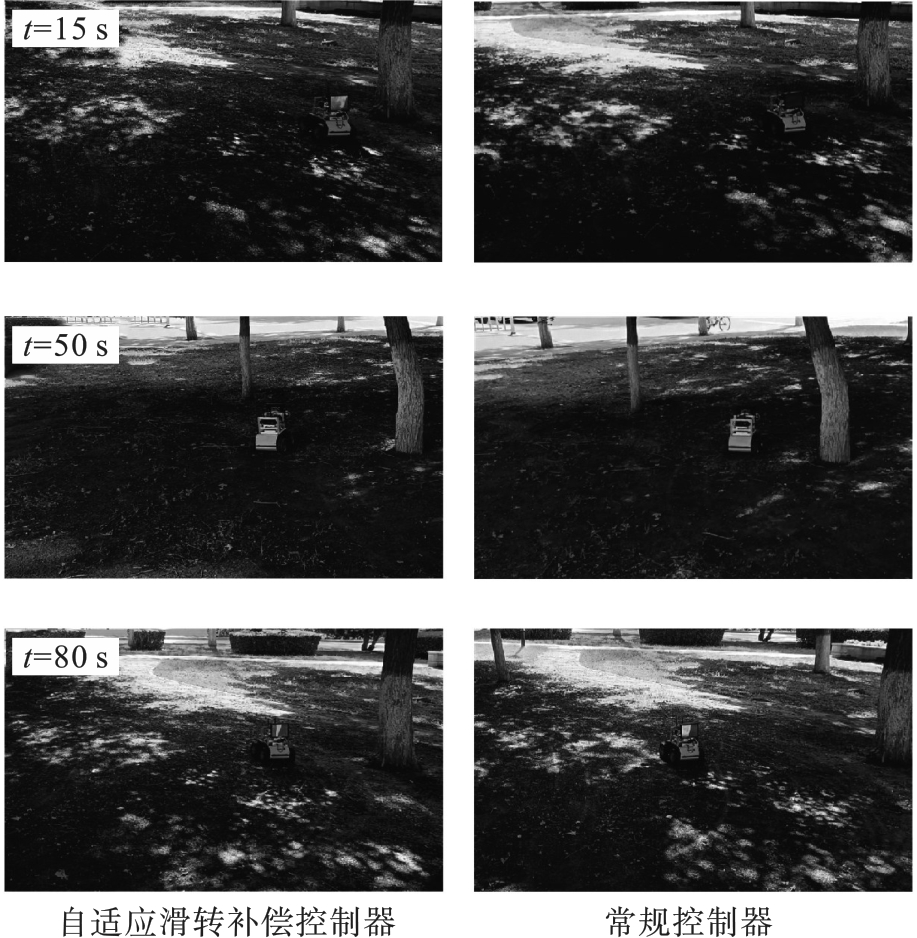
图8 机器人运动照片
Fig. 8 Robot motion photos
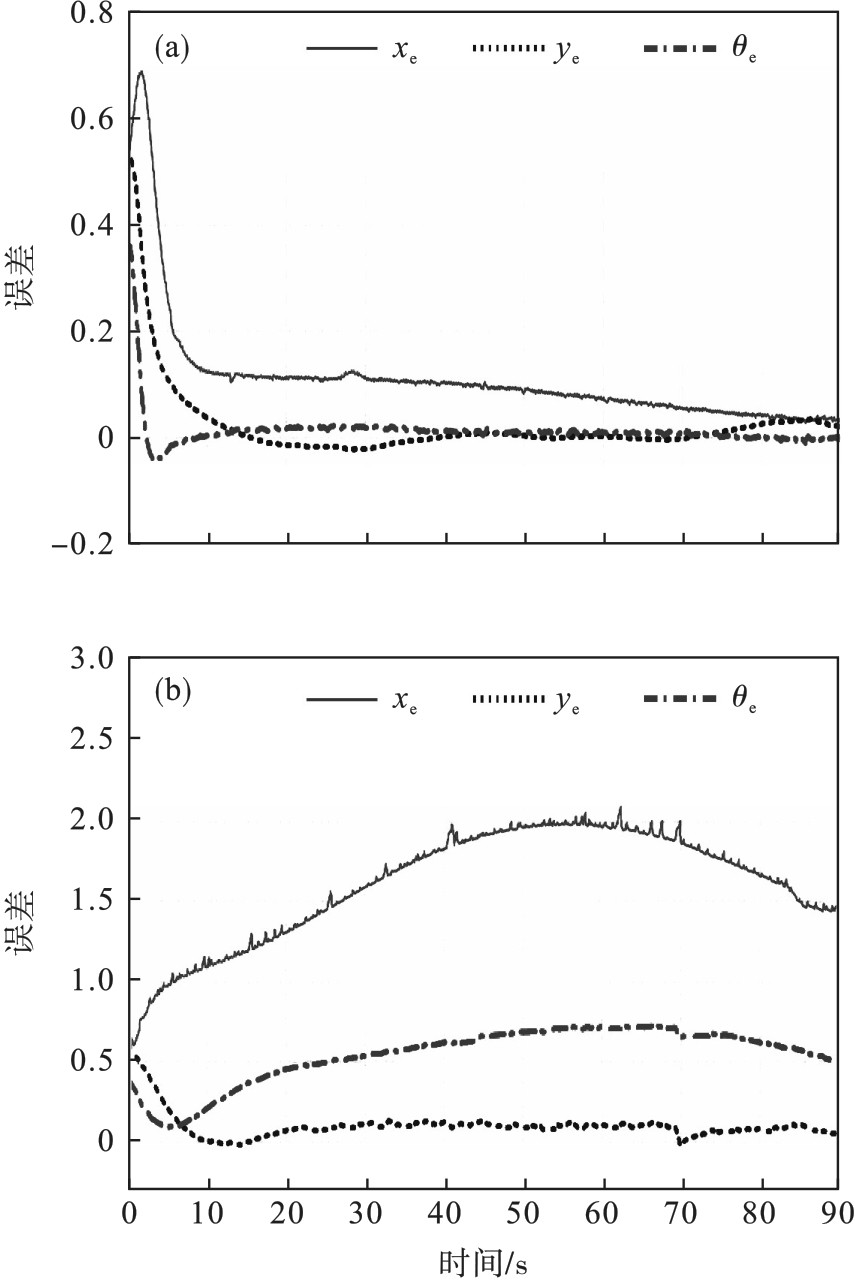
图9 圆形轨迹跟踪误差对比(a)—自适应滑转补偿控制器误差收敛效果;(b)—常规控制器误差收敛效果.
Fig. 9 Comparison of circular trajectory tracking errors
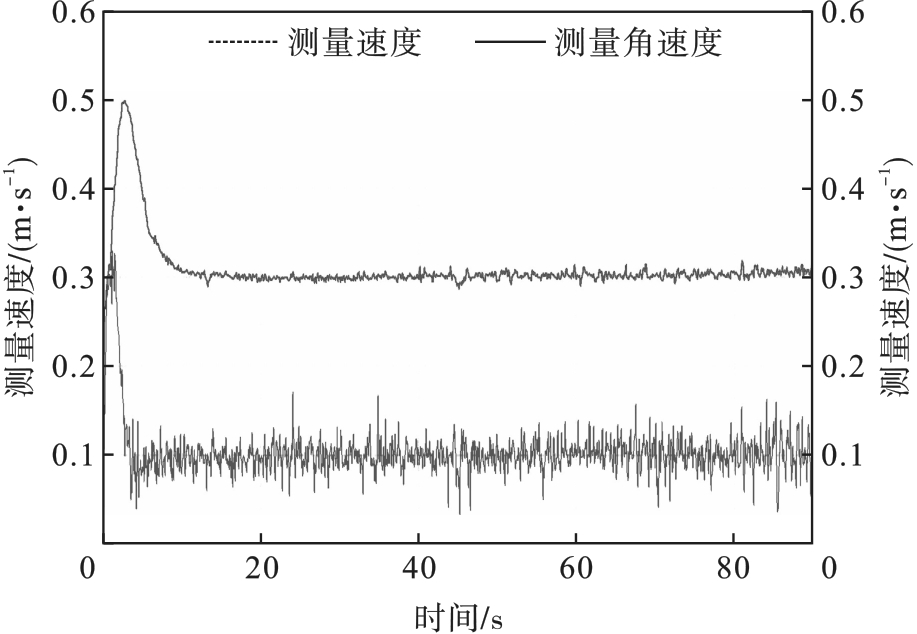
图10 测量速度和角速度
Fig. 10 Tracking speed and angular velocity
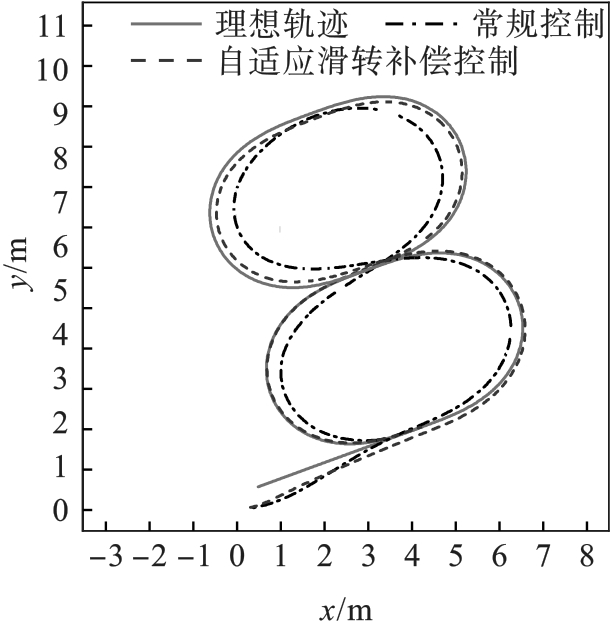
图11 “8”字形轨迹跟踪结果对比
Fig. 11 Comparison of “8” trajectory tracking results
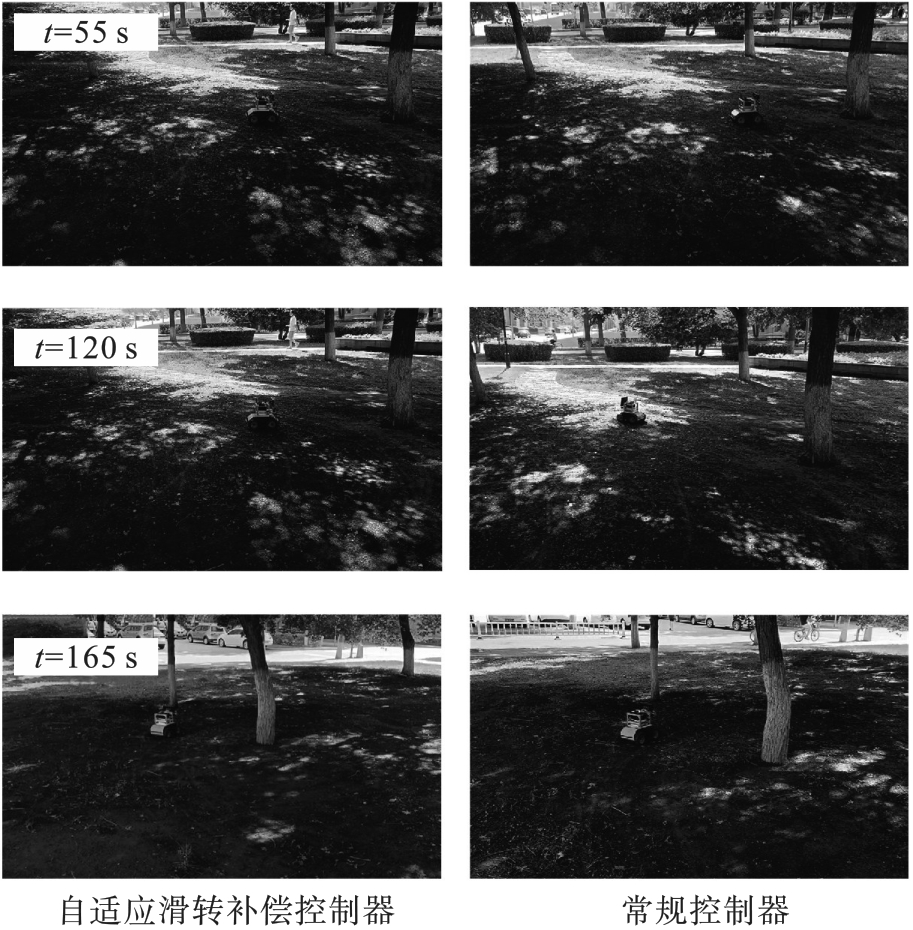
图12 机器人运动照片
Fig. 12 Robot motion photos
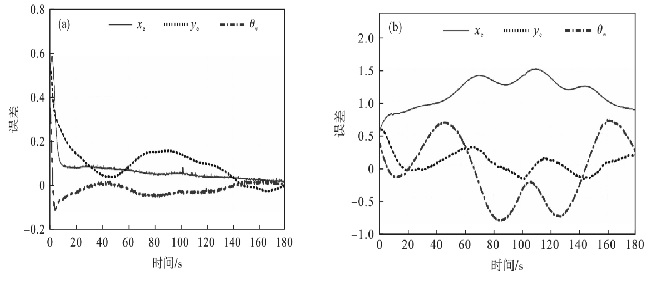
图13 “8”字形轨迹跟踪误差对比(a)—自适应滑转补偿控制器误差收敛效果;(b)—常规控制器误差收敛效果.
Fig. 13 Comparison of trajectory tracking errors
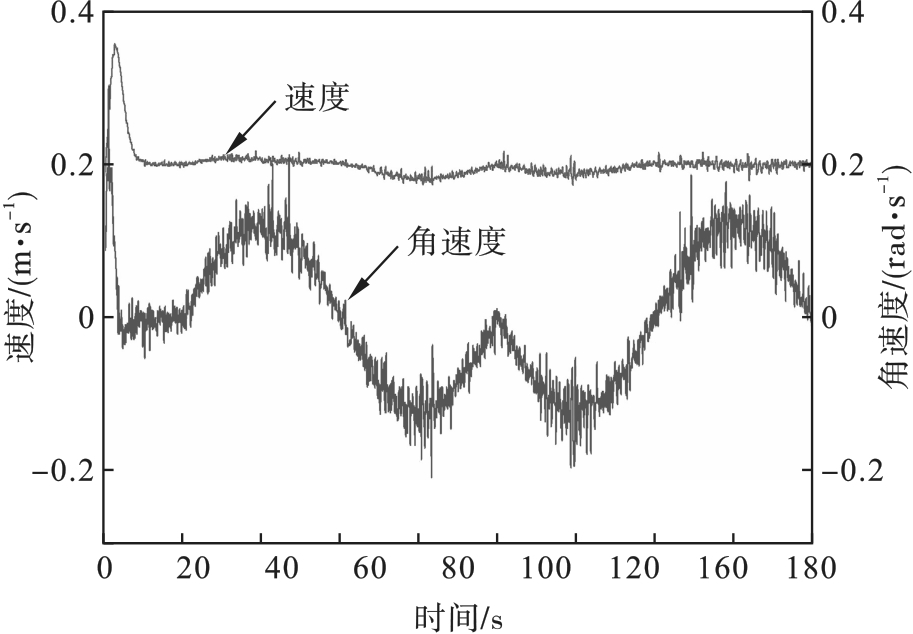
图14 测量速度和角速度
Fig. 14 Tracking speed and angular velocity
| 1 | Liang Z C, Wang Y F, Chen G S,et al.A mechanical model for deformable and mesh pattern wheel of lunar roving vehicle[J].Advances in Space Research,2015,56(11):2515-2526. |
| 2 | 梁忠超,张欢,赵晶,等.基于自适应MPC的无人驾驶车辆轨迹跟踪控制[J].东北大学学报(自然科学版),2020,41(6):835-840. |
| Liang Zhong‑chao, Zhang Huan, Zhao Jing,et al.Trajectory tracking control of unmanned vehicles based on adaptive MPC[J].Journal of Northeastern University (Natural Science),2020,41(6):835-840. | |
| 3 | 唐传茵,赵懿峰,赵亚峰,等.智能车辆轨迹跟踪控制方法研究[J].东北大学学报(自然科学版),2020,41(9):1297-1303. |
| Tang Chuan‑yin, Zhao Yi‑feng, Zhao Ya‑feng,et al.Research on the trajectory tracking control method of intelligent vehicles[J].Journal of Northeastern University (Natural Science),2020,41(9):1297-1303. | |
| 4 | Li L H, Lian J, Chen B C,et al.Trajectory tracking and traction coordinating controller design for lunar rover based on dynamics and kinematics analysis[J].Journal of Vibroengineering,2014,16(6):3064-3075. |
| 5 | Cui M Y, Huang R J, Liu H Z,et al.Adaptive tracking control of wheeled mobile robots with unknown longitudinal and lateral slipping parameters[J].Nonlinear Dynamics,2014,78(3):1811-1826. |
| 6 | Ryu J C, Agrawal S K.Differential flatness‑based robust control of mobile robots in the presence of slip[J].The International Journal of Robotics Research,2011,30(4):463-475. |
| 7 | Hoang N B, Kang H J.Neural network‑based adaptive tracking control of mobile robots in the presence of wheel slip and external disturbance force[J].Neurocomputing,2016,188:12-22. |
| 8 | Liao J F, Chen Z, Yao B.Model‑based coordinated control of four‑wheel independently driven skid steer mobile robot with wheel‑ground interaction and wheel dynamics[J].IEEE Transactions on Industrial Informatics,2019,15(3):1742-1752. |
| 9 | Gao H B, Song X G, Ding L,et al.Adaptive motion control of wheeled mobile robot with unknown slippage[J].International Journal of Control,2014,87(8):1513-1522. |
| 10 | Chen M.Disturbance attenuation tracking control for wheeled mobile robots with skidding and slipping[J].IEEE Transactions on Industrial Electronics,2016,64(4):3359-3368. |
| 11 | Tian Y, Sarkar N.Control of a mobile robot subject to wheel slip[J].Journal of Intelligent & Robotic Systems,2014,74(3):915-929. |
| 12 | Yoo S J.Approximation‑based adaptive control for a class of mobile robots with unknown skidding and slipping[J].International Journal of Control,Automation and Systems,2012,10(4):703-710. |
| 13 | Ding L, Huang L, Li S,et al.Definition and application of variable resistance coefficient for wheeled mobile robots on deformable terrain[J].IEEE Transactions on Robotics,2020,36(3):894-909. |
| 14 | Degel W, Lupberger S, Odenthal D,et al.Scalable slip control with torque vectoring including input‑to‑state stability analysis[J].IEEE Transactions on Control Systems Technology,2022,31(3):1250-1265. |
| 15 | Matraji I, Al‑Durra A, Haryono A,et al.Trajectory tracking control of skid‑steered mobile robot based on adaptive second order sliding mode control[J].Control Engineering Practice,2018,72:167-176. |
| 16 | Zhang Z S, Ma R H, Wang L F,et al.Novel PMSM control for anti‑lock braking considering transmission properties of the electric vehicle[J].IEEE Transactions on Vehicular Technology,2018,67(11):10378-10386. |
| [1] | 任朝晖, 刘玉麟, 姜泽宇, 陈翔宇. 基于模糊增益滑模四旋翼无人机自适应容错控制[J]. 东北大学学报(自然科学版), 2024, 45(2): 209-216. |
| [2] | 唐传茵, 赵懿峰, 赵亚峰, 周淑文. 智能车辆轨迹跟踪控制方法研究[J]. 东北大学学报:自然科学版, 2020, 41(9): 1297-1303. |
| [3] | 梁忠超, 张欢, 赵晶, 王永富. 基于自适应MPC的无人驾驶车辆轨迹跟踪控制[J]. 东北大学学报:自然科学版, 2020, 41(6): 835-840. |
| [4] | 周来宏, 窦景欣, 张居乾, 闻邦椿. 基于改进反步法的四旋翼无人机轨迹跟踪控制[J]. 东北大学学报:自然科学版, 2018, 39(1): 66-70. |
| [5] | 江维, 吴功平, 樊飞, 张颉. 高压线路四臂移动作业机器人BP网络联动控制[J]. 东北大学学报:自然科学版, 2016, 37(11): 1530-1535. |
| [6] | 范泉涌,叶丹. 一类具有执行器故障的马尔科夫跳跃系统容错控制[J]. 东北大学学报:自然科学版, 2014, 35(9): 1217-1220. |
| [7] | 任涛,黄金,于海,王景杨. 基于数据采样的混沌容错同步控制方法[J]. 东北大学学报:自然科学版, 2014, 35(10): 1386-1389. |
| [8] | 杨冬梅;孙俊娜;. 不确定时滞线性离散系统的鲁棒容错控制[J]. 东北大学学报(自然科学版), 2012, 33(2): 161-164. |
| [9] | 刘杰;林剑峰;马晓波;刘阔;. 挖掘机器人模糊鲁棒控制的研究[J]. 东北大学学报(自然科学版), 2010, 31(9): 1333-1336. |
| [10] | 张颖伟;王小刚;王明顺;张严心;. 基于观测器的时滞系统的容错控制[J]. 东北大学学报(自然科学版), 2006, 27(8): 839-842. |
| [11] | 刘满;井元伟;张嗣瀛. Delta算子系统D稳定鲁棒容错控制[J]. 东北大学学报(自然科学版), 2004, 25(8): 715-718. |
| [12] | 赵军;金刚. 一类不确定非线性切换系统的鲁棒容错控制[J]. 东北大学学报(自然科学版), 2004, 25(3): 209-211. |
| [13] | 曹洋;徐心和. 一种基于交叉耦合的速度控制器[J]. 东北大学学报(自然科学版), 2003, 24(5): 420-423. |
| [14] | 姚波;张庆灵;陈跃鹏;张国锋. 广义系统具有完整性圆盘极点配置控制器设计[J]. 东北大学学报:自然科学版, 2002, 23(6): 535-538. |
| [15] | 周玉国;张颖伟;王福利. 不确定非线性系统的容错控制[J]. 东北大学学报:自然科学版, 2002, 23(5): 409-412. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||