东北大学学报(自然科学版) ›› 2024, Vol. 45 ›› Issue (11): 1521-1528.DOI: 10.12068/j.issn.1005-3026.2024.11.001
• 信息与控制 • 下一篇
李想, 孙振超, 高振宇( )
)
Xiang LI, Zhen-chao SUN, Zhen-yu GAO()
摘要:
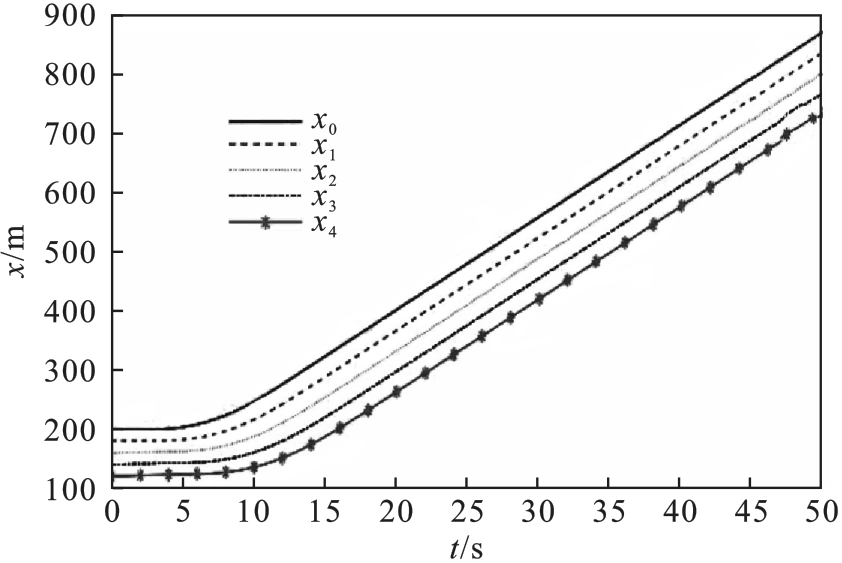
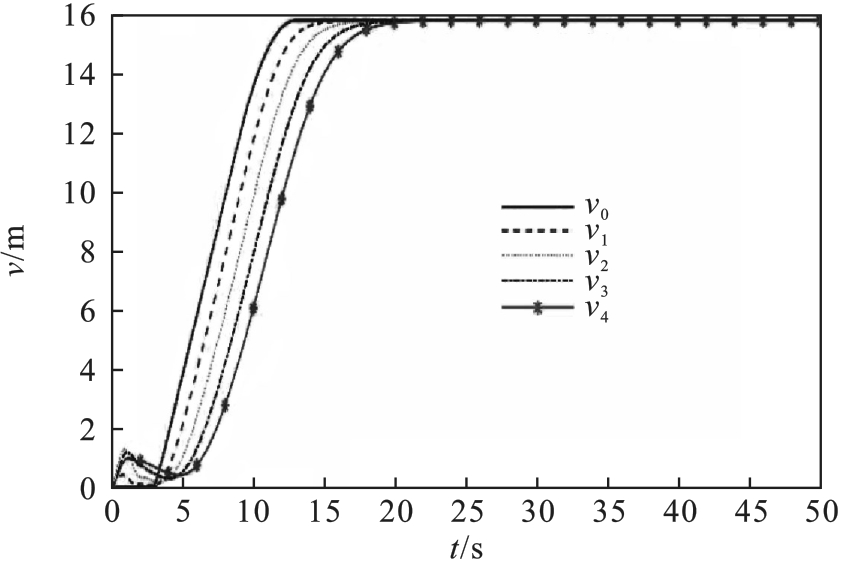
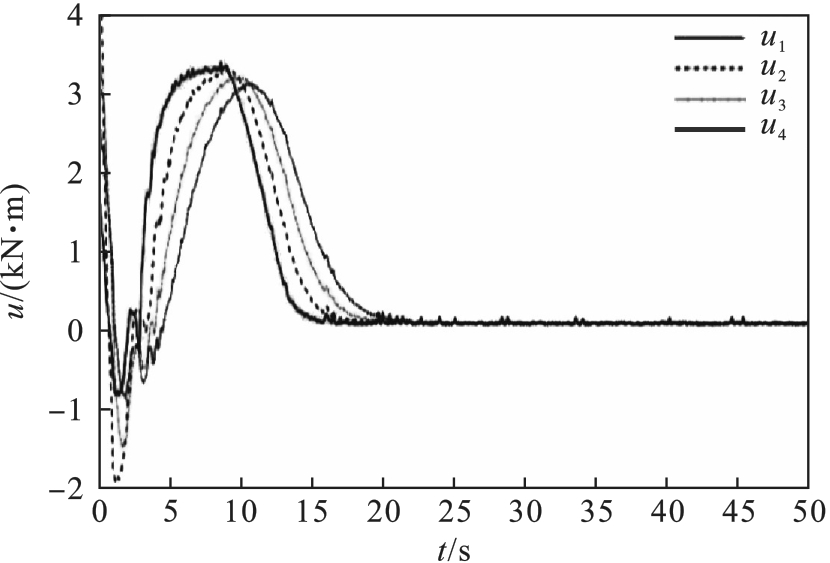
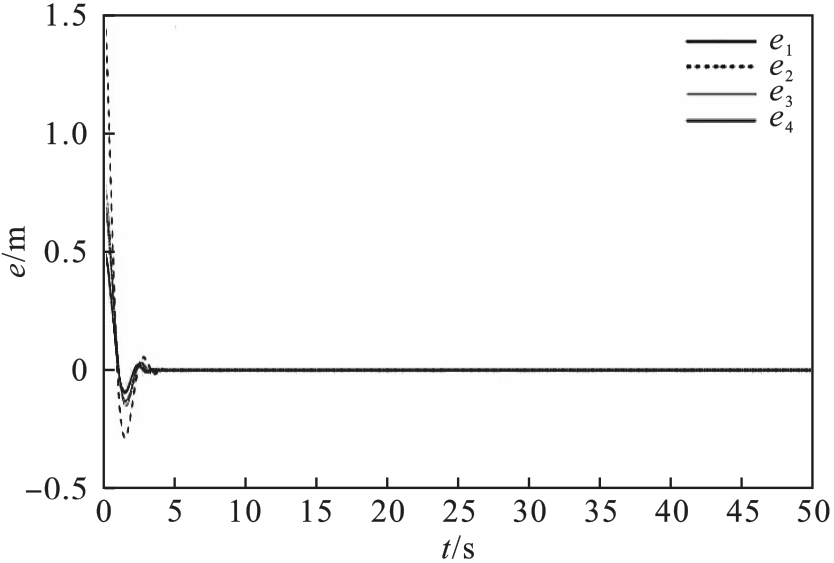
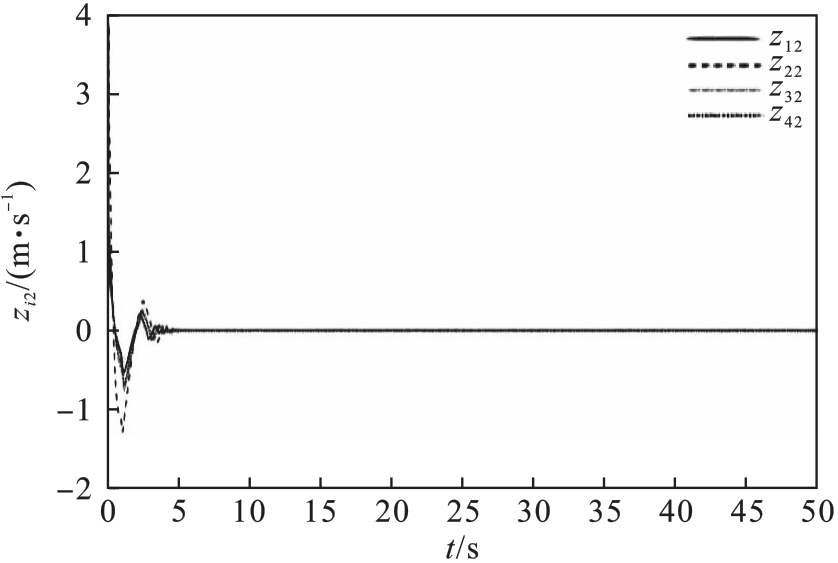
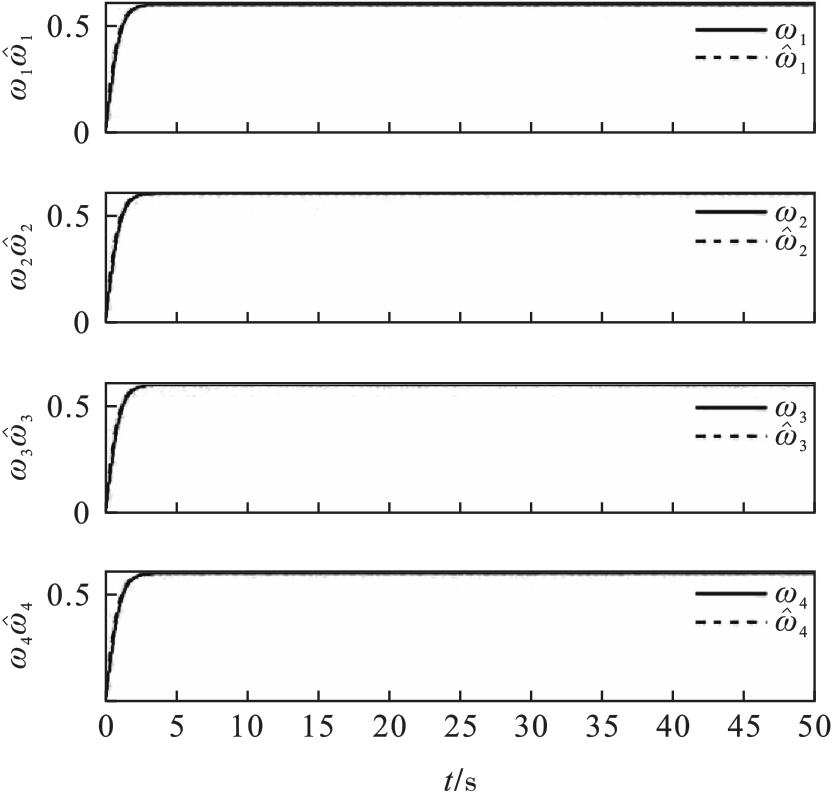
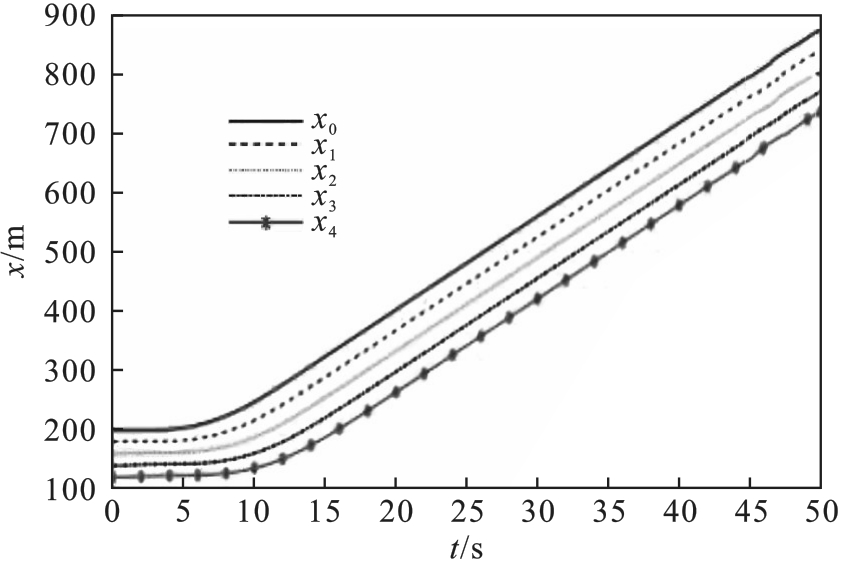
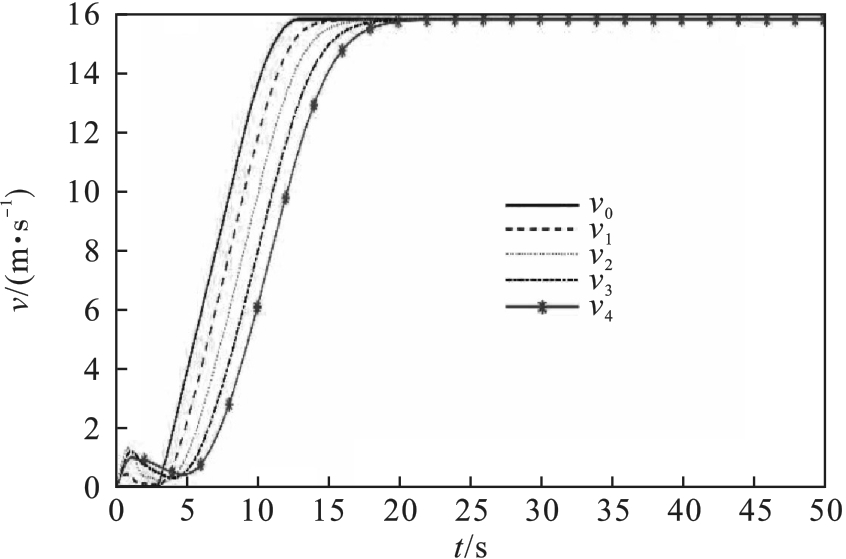
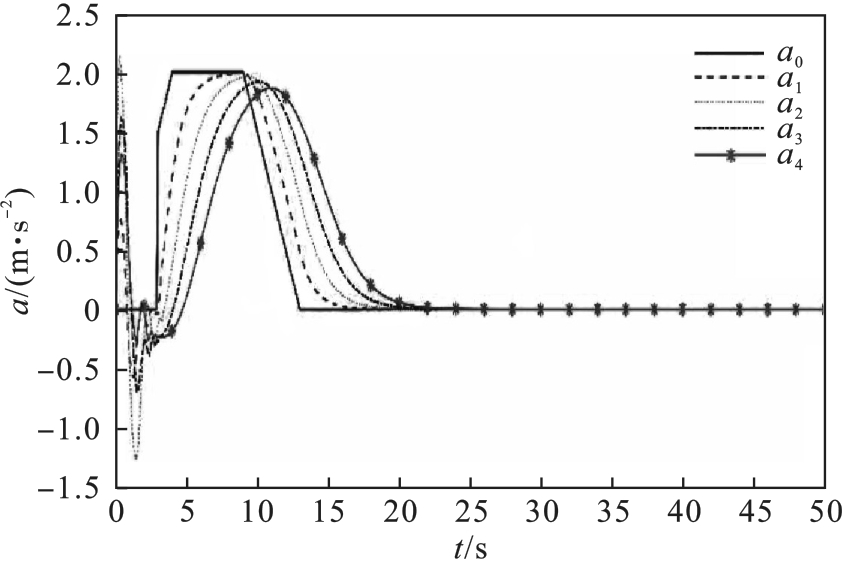
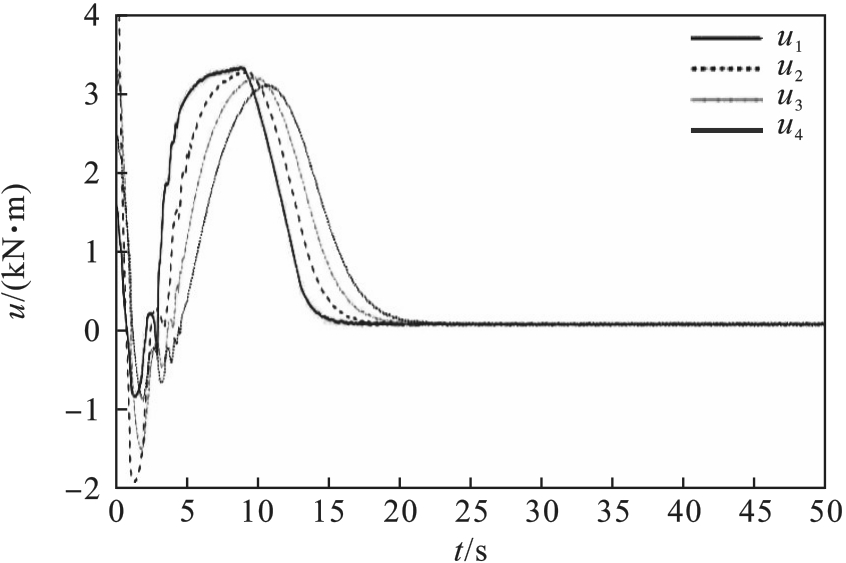
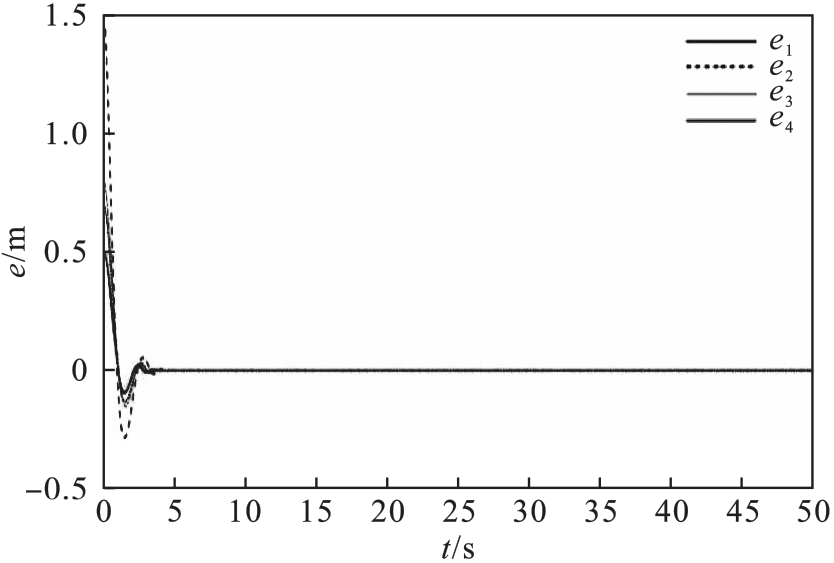
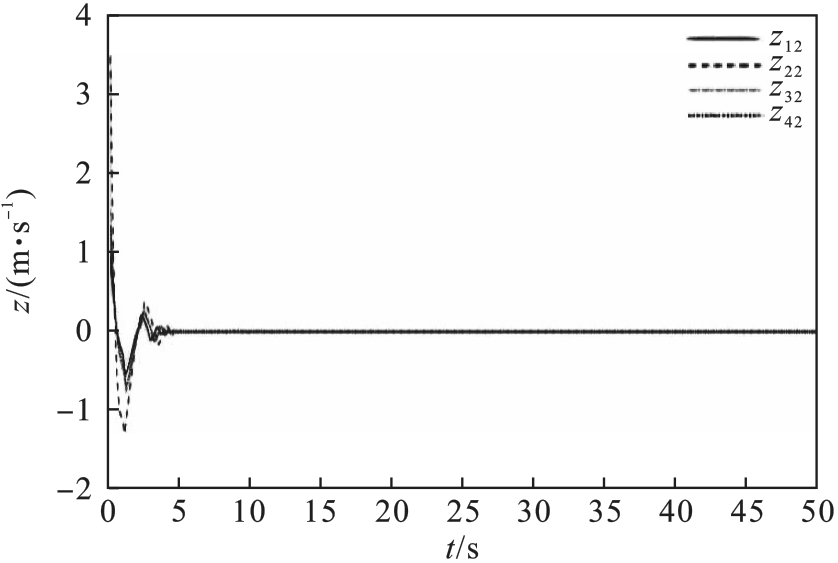
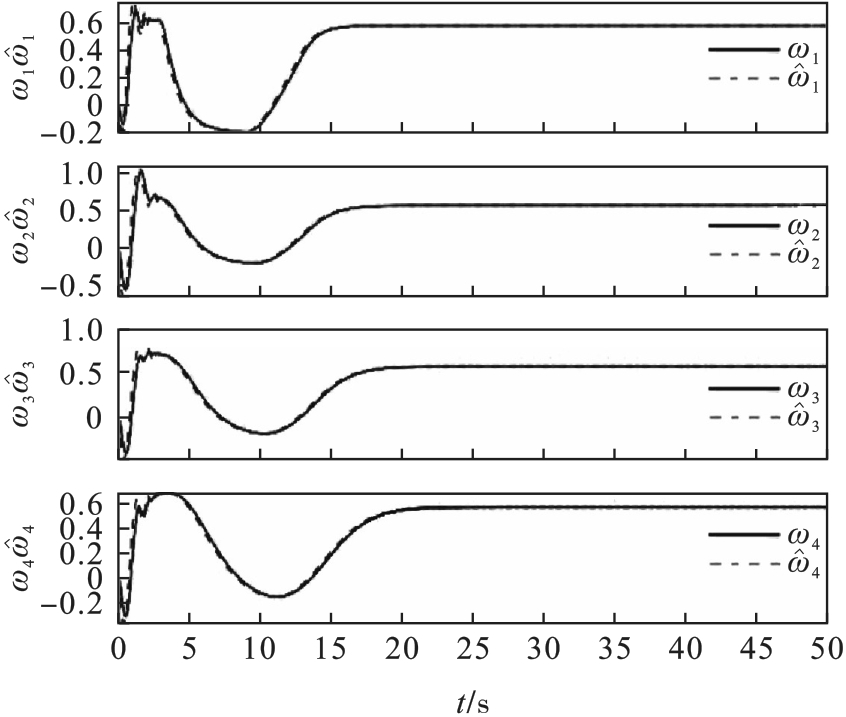
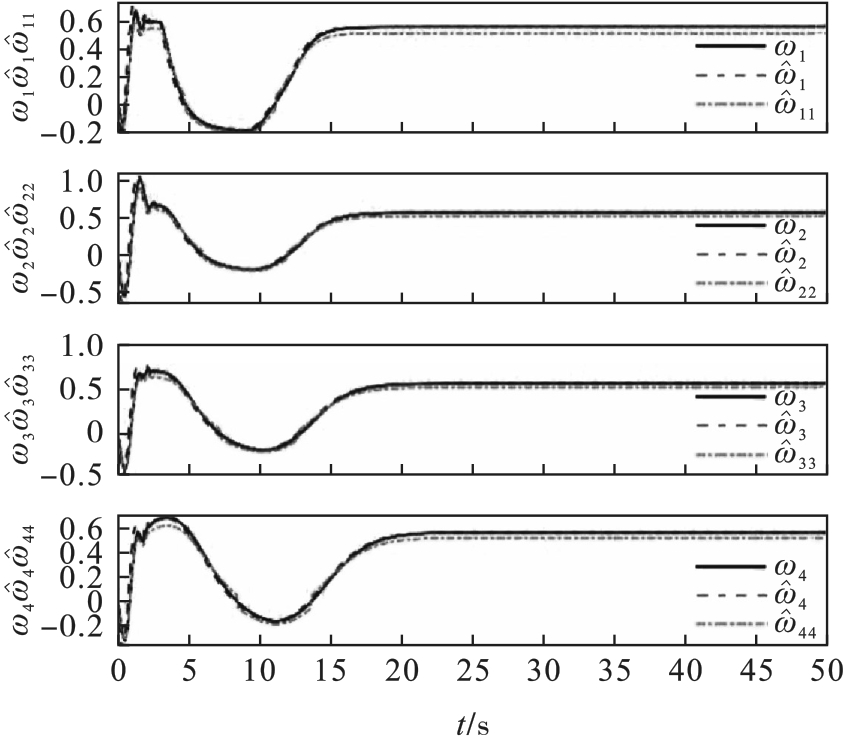
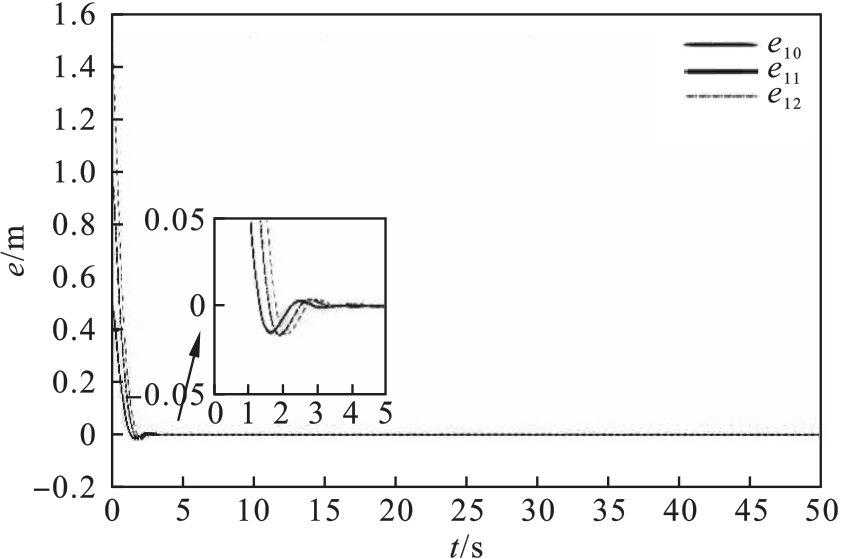
针对含有模型不确定及外部扰动的智能网联自主车辆快速协同队列控制问题,提出了一种基于扰动观测器的固定时间队列控制方案.首先,构建了固定时间扰动观测器,在设定时间内精确估计由模型不确定及外部扰动构成的复合扰动.其次,基于扰动观测器、反步法及固定时间理论,设计了一种固定时间协同队列控制器,使得车辆队列控制系统是固定时间收敛的,保证了车辆间跟踪误差在给定时间内收敛到零,且收敛时间只与控制器参数有关.通过Lyapunov理论,分别证明了单车稳定性及队列稳定性.最后通过5辆车辆组成的队列控制仿真验证了给定方案的有效性.
中图分类号: