东北大学学报(自然科学版) ›› 2024, Vol. 45 ›› Issue (1): 58-67.DOI: 10.12068/j.issn.1005-3026.2024.01.008
汪星恺1,2, 吴维敏1,2, 邢子超1,2, 牛昊一1,2
Xing-kai WANG1,2, Wei-min WU1,2, Zi-chao XING1,2, Hao-yi NIU1,2
摘要:
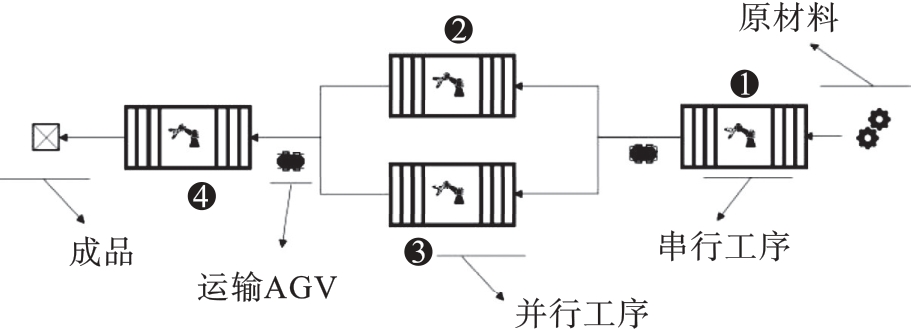
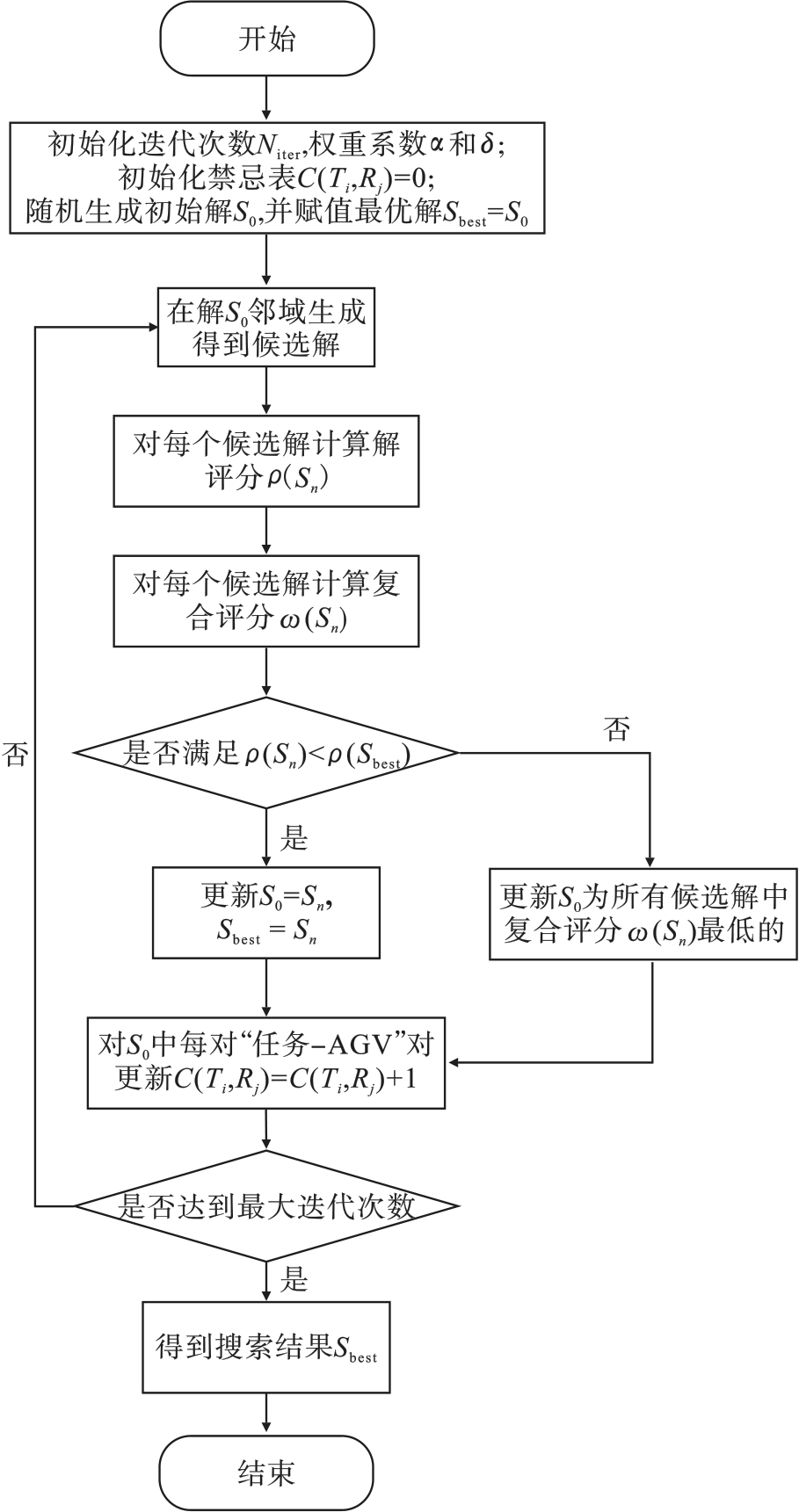
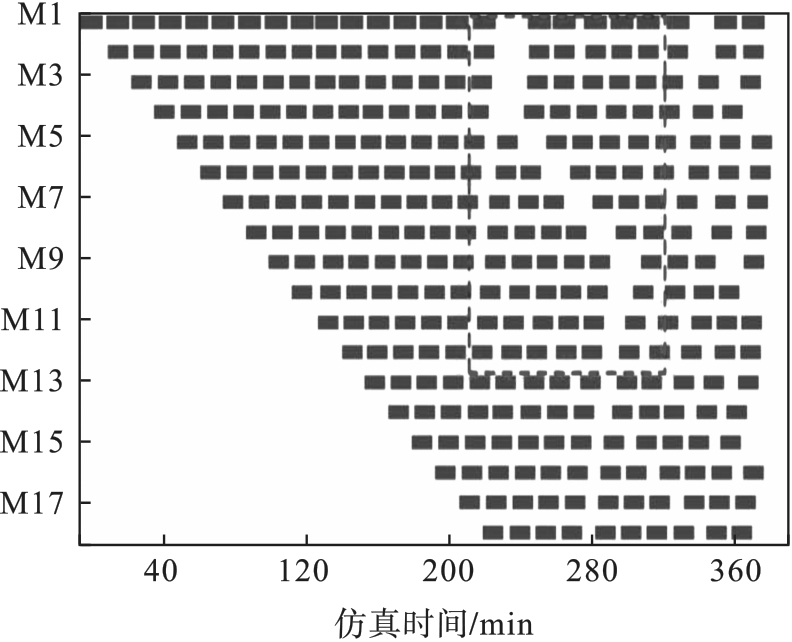
针对无缓存流水线生产系统中的AGV(automated guided vehicle)调度问题提出了复合评分的启发式调度算法,降低了系统中AGV执行任务的间隔等候时间.首先,通过建立数学模型,对目前主流的AGV规模估计方法做出了改进.其次,提出了一种新的基于复合评分禁忌搜索的AGV前瞻调度算法.不同于目前主流的以空驶距离为优化目标的调度算法,该算法能够以最小化工件延误时间、最小化AGV空驶距离等多目标来统筹调度AGV.最后,为验证所提算法的有效性,从多个角度与已有算法进行了实验对比.仿真实验结果表明,相较于其他算法,提出的前瞻调度算法能够更有效地解决无缓存流水线生产系统这一新场景的AGV调度问题.实车实验也证明了该算法在实际生产中的有效性.
中图分类号: