东北大学学报(自然科学版) ›› 2024, Vol. 45 ›› Issue (1): 85-92.DOI: 10.12068/j.issn.1005-3026.2024.01.011
吴飞, 王梦辉, 李亦能
Fei WU, Meng-hui WANG, Yi-neng LI
摘要:
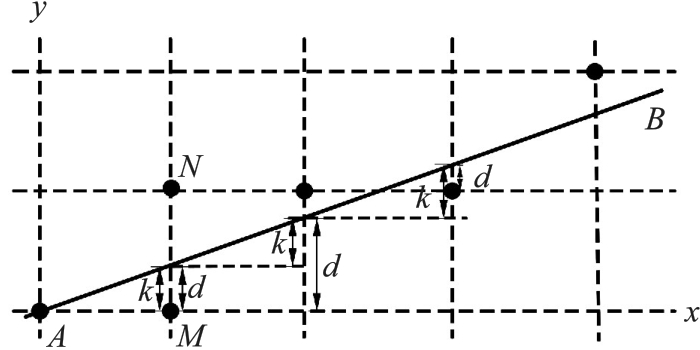
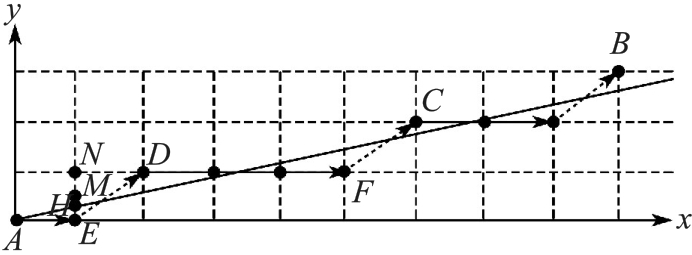
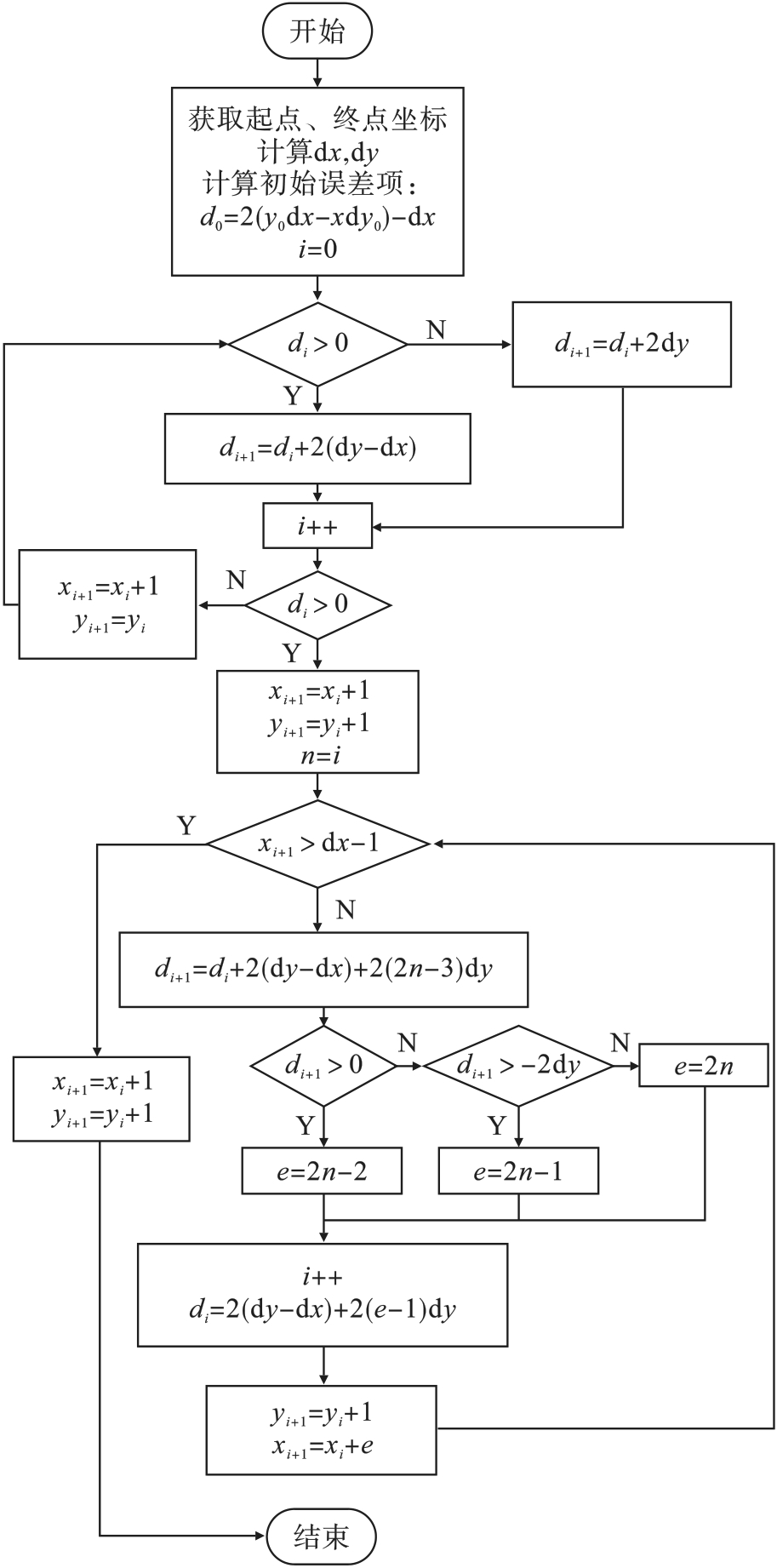
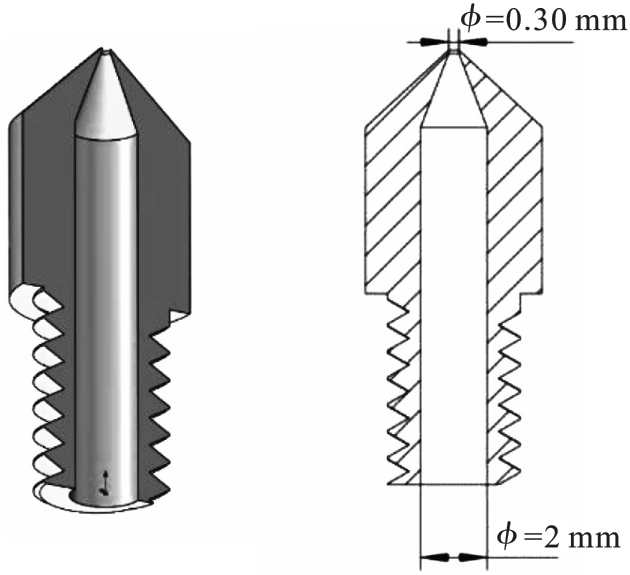
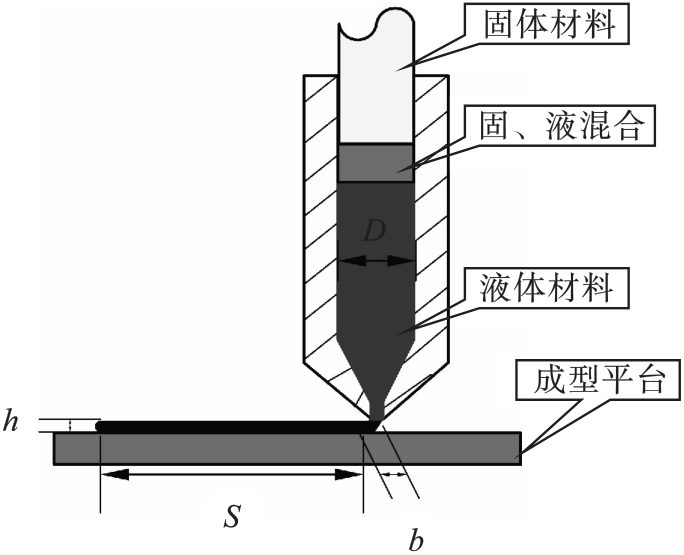
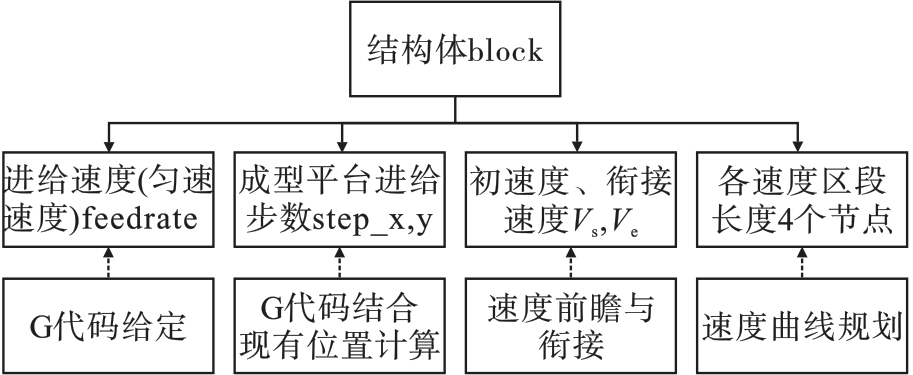
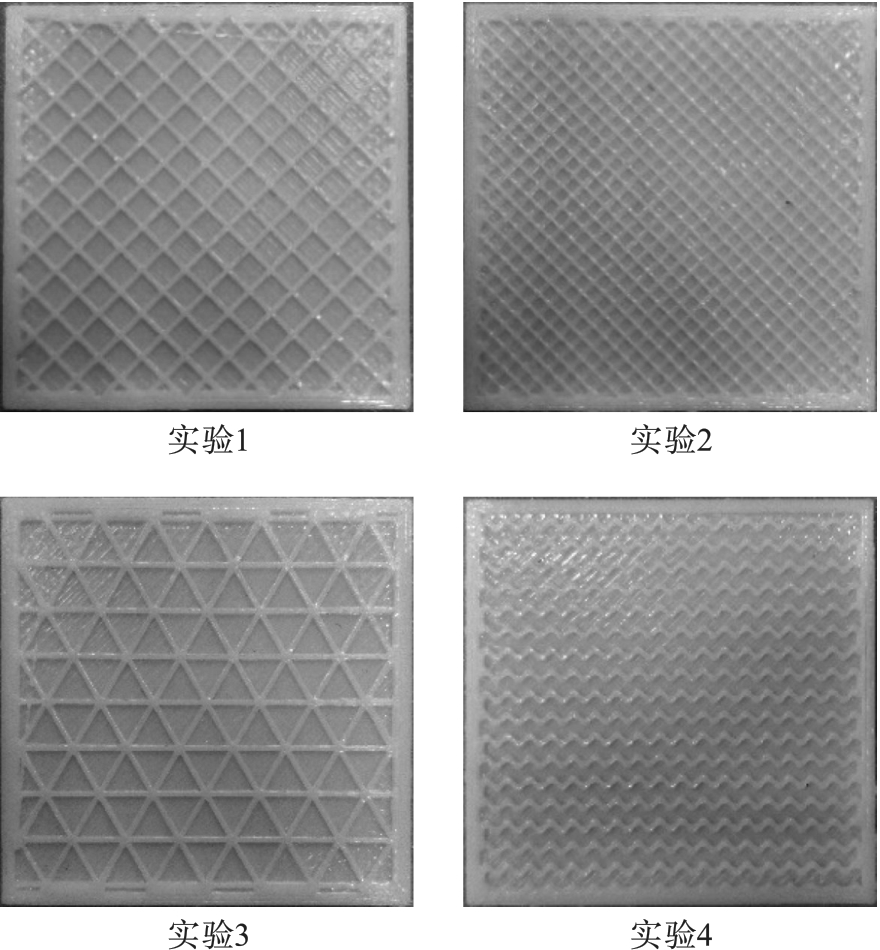
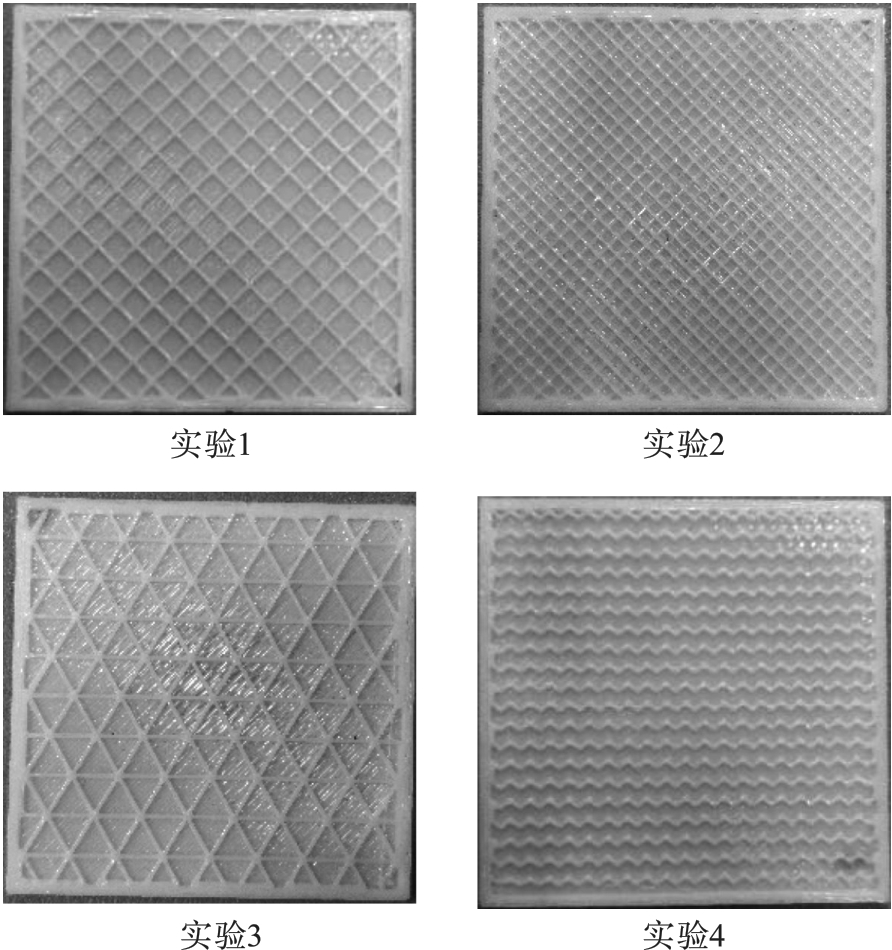
针对3D打印过程中,打印机多轴联动插补算法计算效率低的问题和Bresenham算法在3D打印运动控制中的不足,在现有算法基础之上提出阶跃式Bresenham算法、速度自适应算法,分别完成喷嘴的成型扫描运动和浆料的挤出运动.采用两种算法相结合的方式控制3D打印机多轴联动,从而提高3D打印机的插补速度.同时分析了该控制方式在微控制器中的实现流程,并将其移植于微控制器中.本研究设计了直线插补仿真试验和不同算法的3D打印试验,证明了该控制方式在打印精度不变的前提下能够提高打印效率.
中图分类号: