摘要:
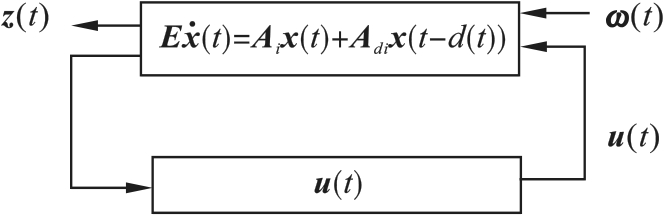
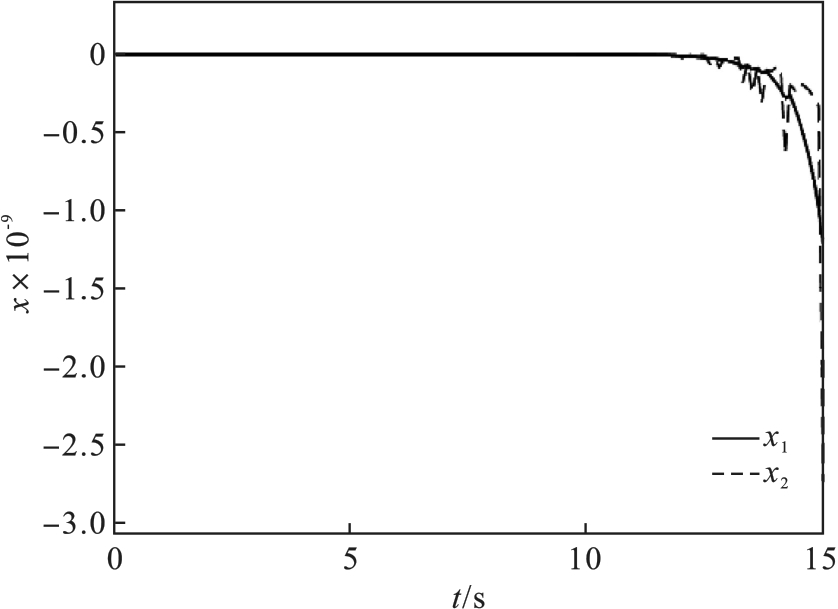
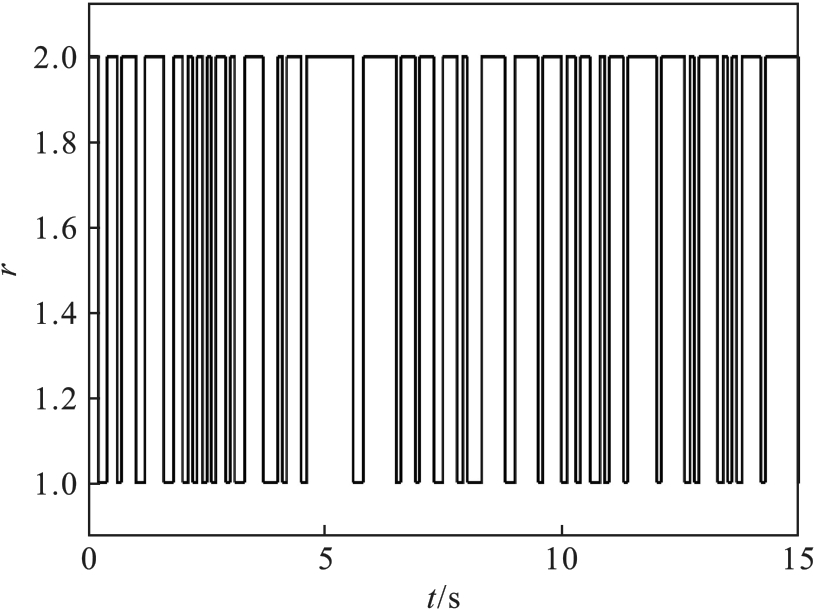
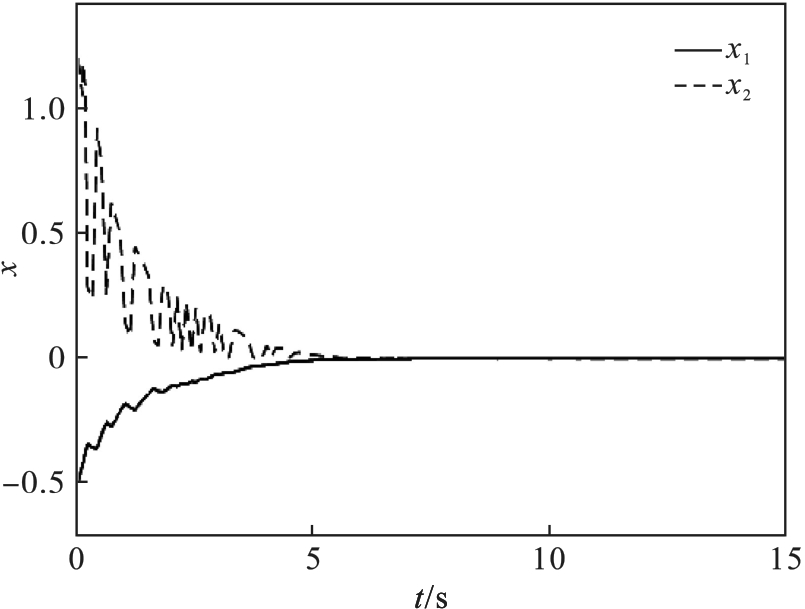
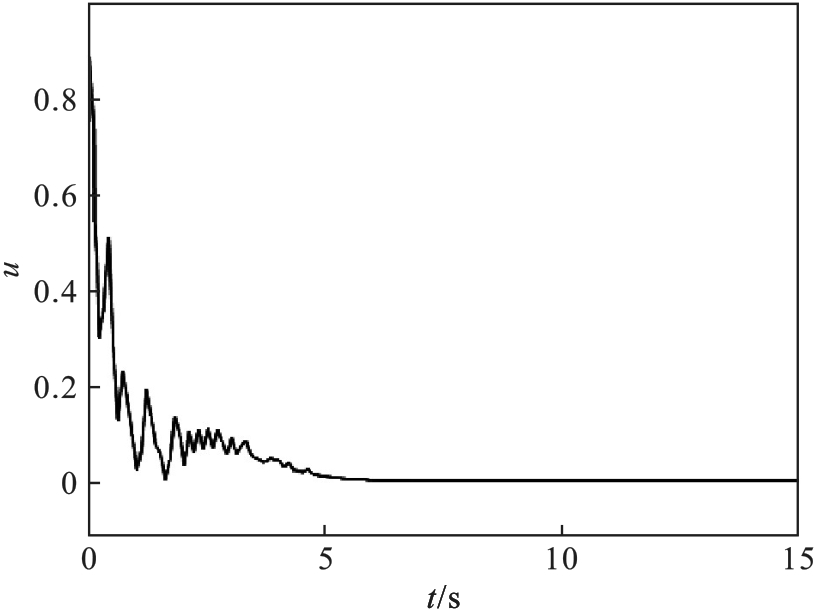
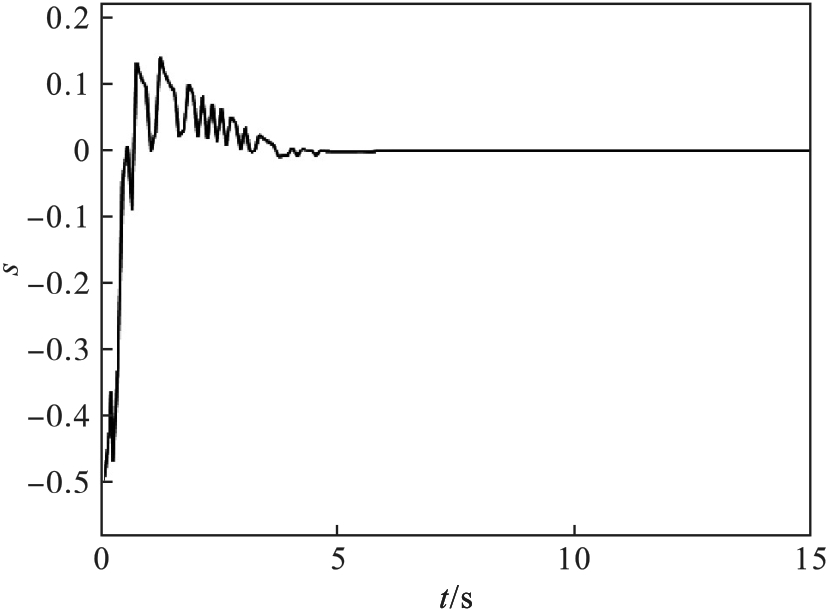
研究了一类转移速率部分未知的广义时滞Markov跳变系统的滑模控制问题.首先,对广义时滞Markov跳变系统设计了积分型滑模面,并求出对应的等效控制器.之后,构建Lyapunov泛函,通过线性矩阵不等式方法得到闭环系统随机容许且满足性能的充分条件,运用加减项方法以及引入自由权矩阵,使得到的结果降低了保守性;对滑模力学分析,设计了滑模控制器,使得系统能在有限时间内到达滑模面上.最后,通过数值算例与仿真验证了理论的可行性.
中图分类号:
杨冬梅, 杜玲秀, 祝春霞. 非线性广义时滞Markov跳变系统的滑模控制[J]. 东北大学学报(自然科学版), 2024, 45(2): 153-159.
Dong-mei YANG, Ling-xiu DU, Chun-xia ZHU. H∞ Sliding Mode Control for Nonlinear Generalized Time-delay Markov Jump Systems[J]. Journal of Northeastern University(Natural Science), 2024, 45(2): 153-159.