东北大学学报(自然科学版) ›› 2024, Vol. 45 ›› Issue (2): 217-225.DOI: 10.12068/j.issn.1005-3026.2024.02.009
• 机械工程 • 上一篇
李小彭1, 周赛男1, 刘佳琪1, 尹猛2
Xiao-peng LI1, Sai-nan ZHOU1, Jia-qi LIU1, Meng YIN2
摘要:
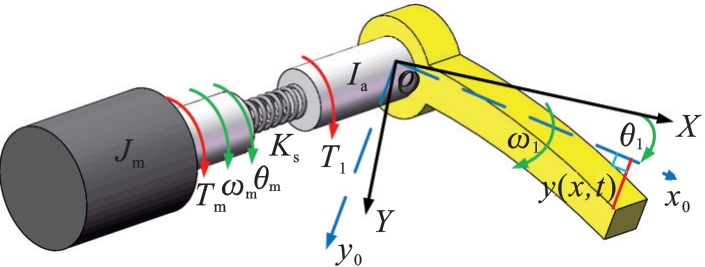
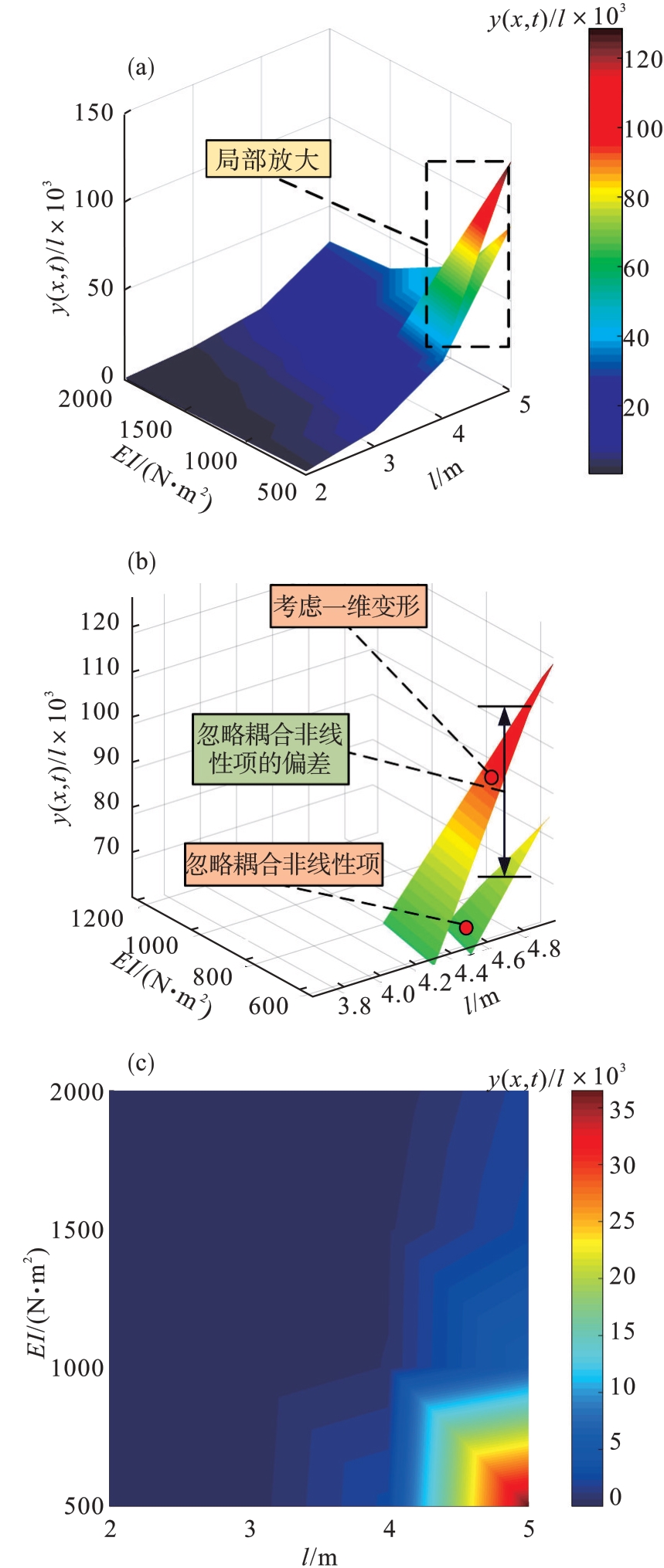
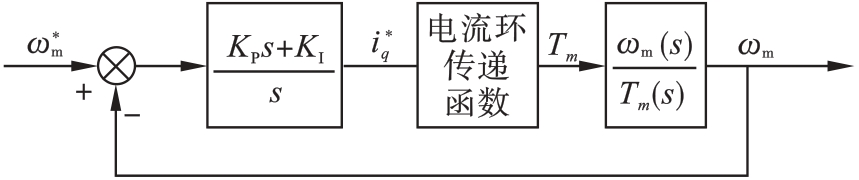
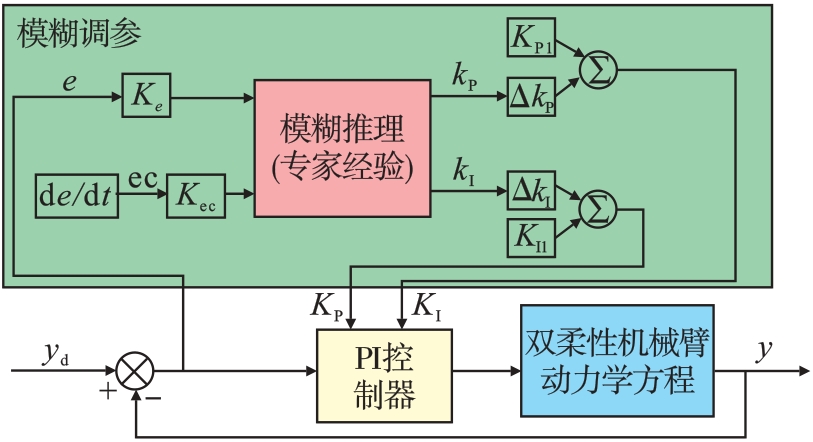
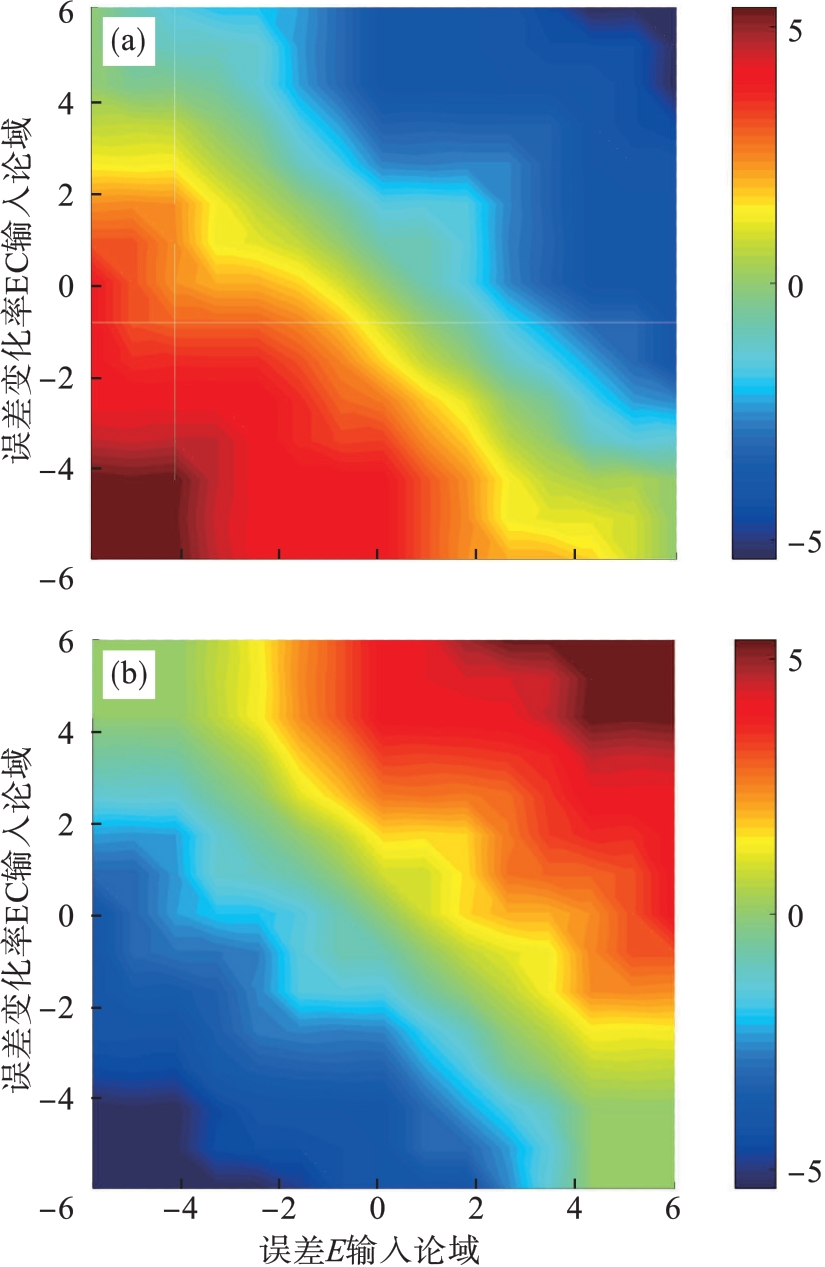
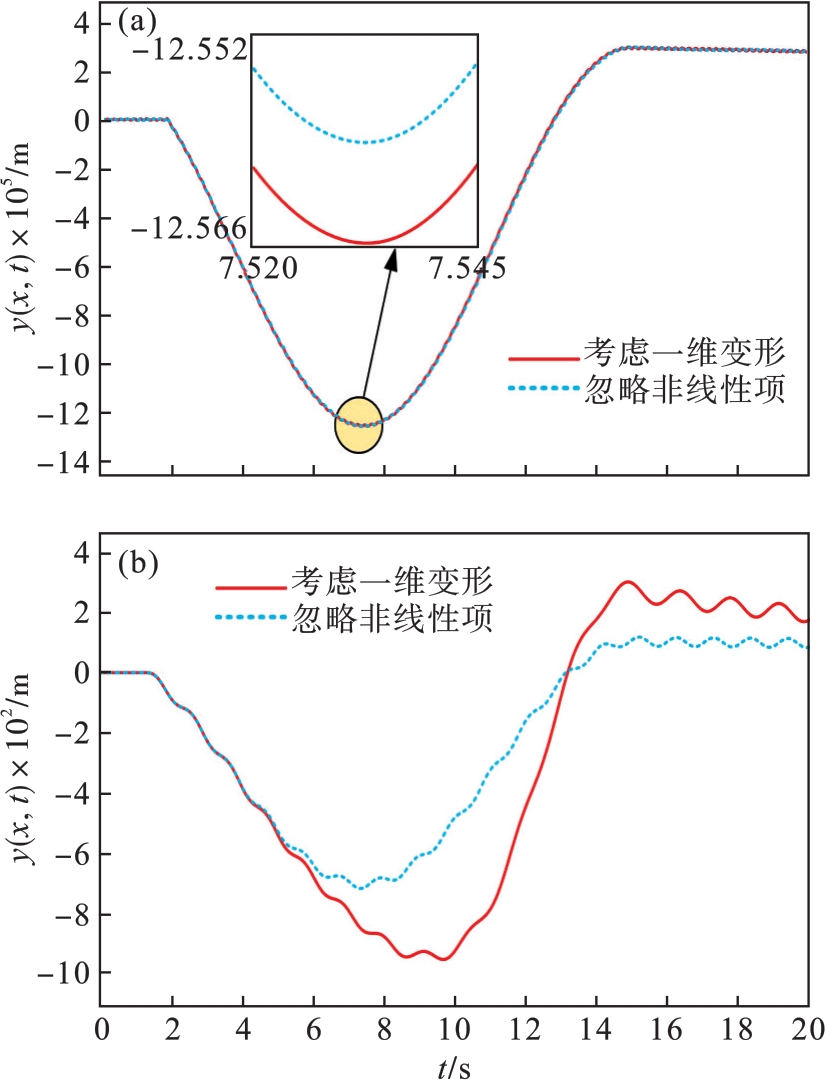
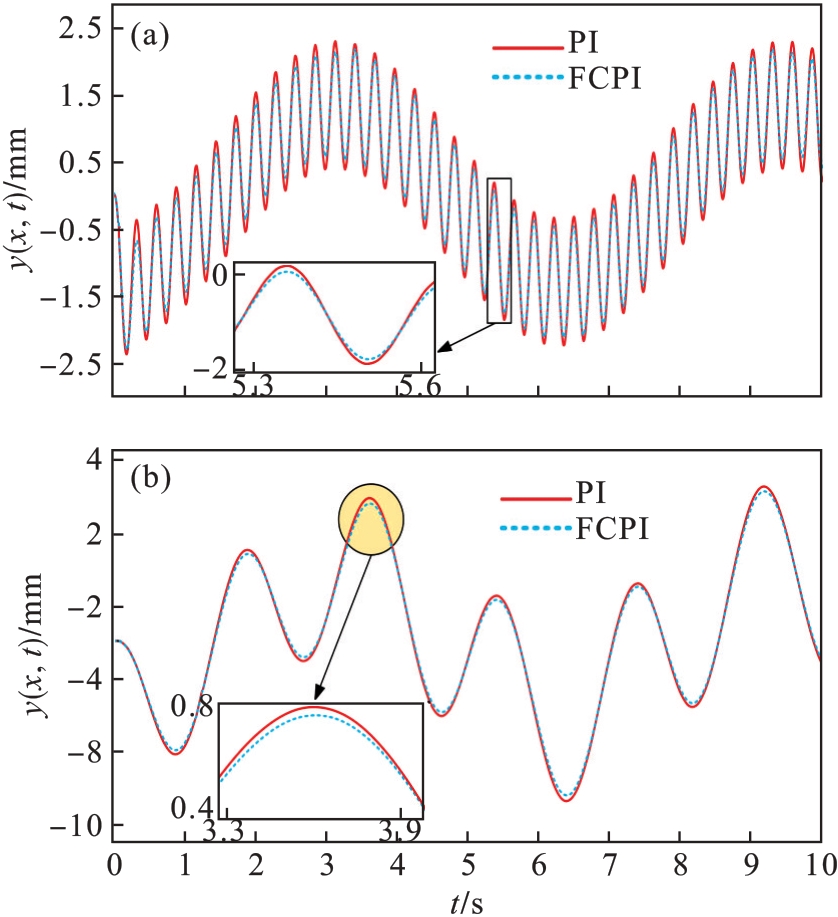
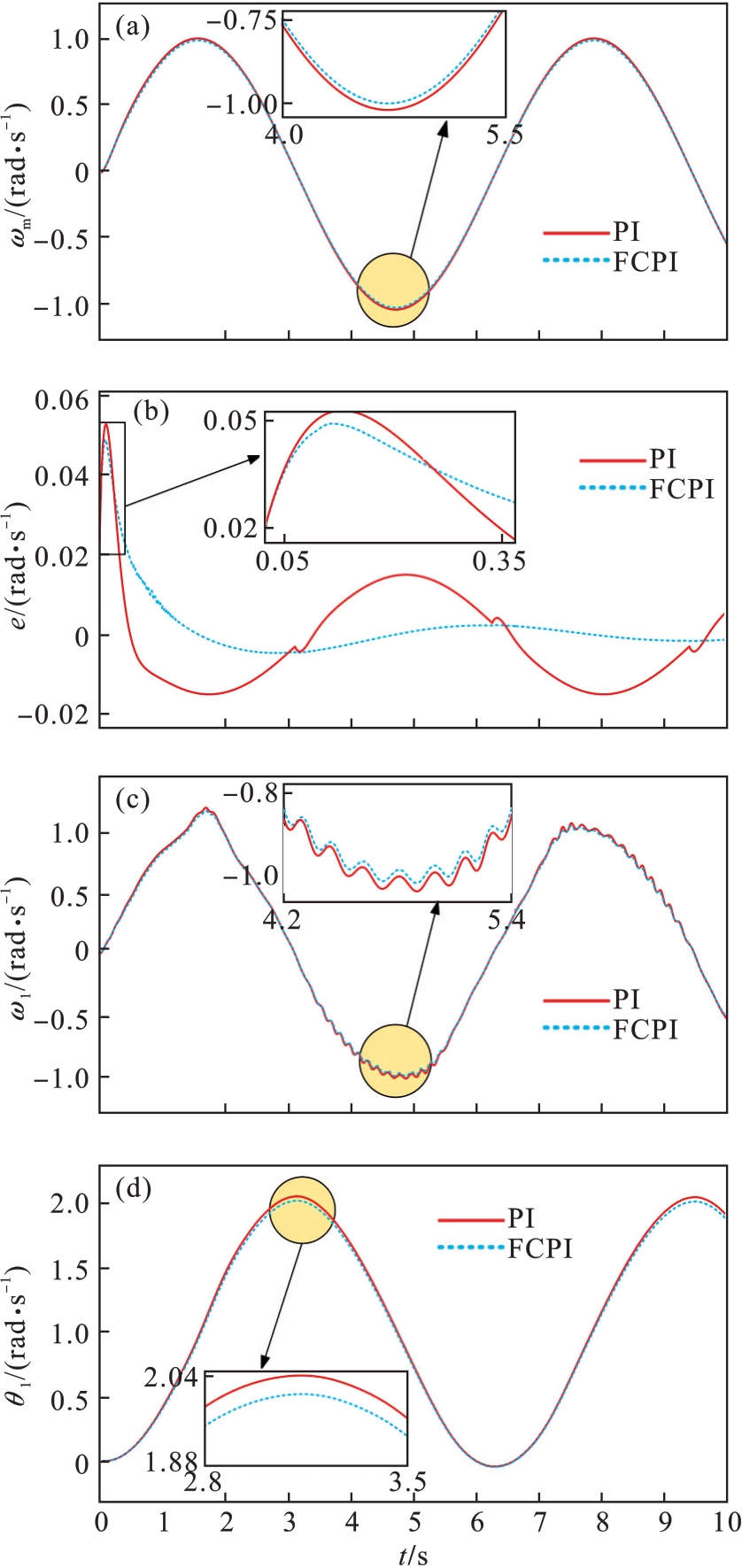
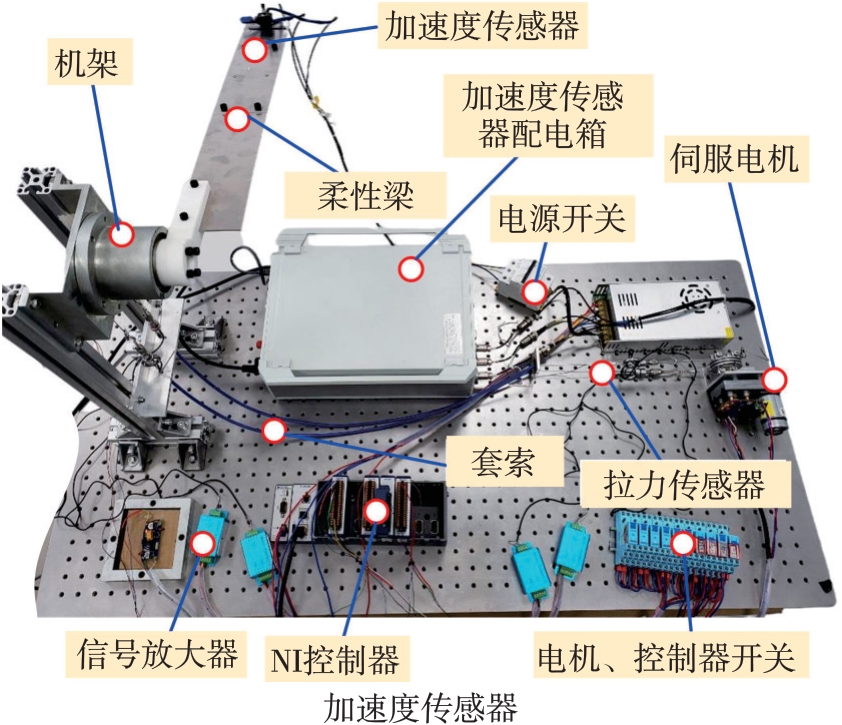
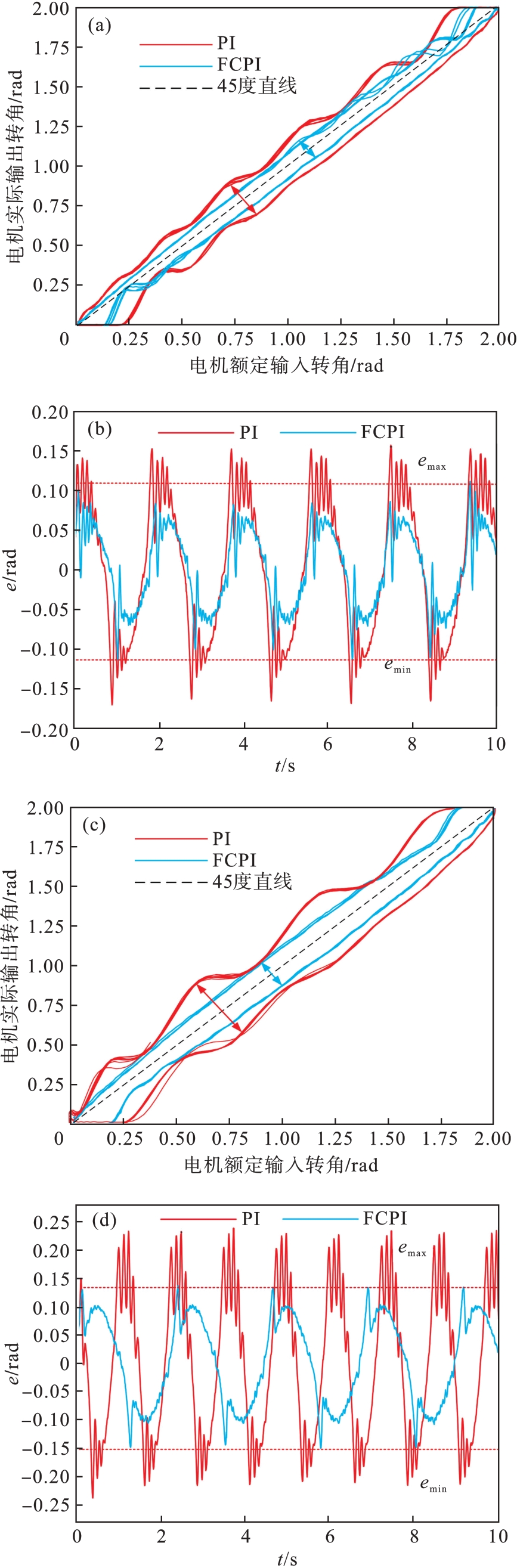
机械臂伺服驱动系统中柔性因素的存在易导致机械臂输出转速波动,甚至引发系统谐振.为抑制系统转速波动,使机械臂传动系统性能稳定,使用模糊理论整定PI控制器参数的控制策略.根据假设模态法和拉格朗日动力学方程建立了考虑LuGre摩擦模型的双柔性机械臂传动系统动力学方程,并分析了动力学方程中耦合非线性项对系统传动特性的影响.使用极点配置策略确定PI控制器参数的取值范围,后根据模糊规则实时调整控制器参数,以减小伺服系统输出转速的波动,进而抑制系统谐振.最后,借助数值仿真分析和机械臂控制实验,与传统PI控制策略对比,发现本文所述控制策略可使电机端转角跟踪误差绝对值的平均值降低43.066%,柔性负载转角误差的标准差降低46.506%,更加验证了所提模糊规则整定PI控制器参数抑振方法的有效性.
中图分类号: