东北大学学报(自然科学版) ›› 2024, Vol. 45 ›› Issue (6): 829-836.DOI: 10.12068/j.issn.1005-3026.2024.06.010
• 机械工程 • 上一篇
房立金1, 高跃2,3( ), 曹新星2, 巩云鹏2
), 曹新星2, 巩云鹏2
Li-jin FANG1, Yue GAO2,3(), Xin-xing CAO2, Yun-peng GONG2
摘要:
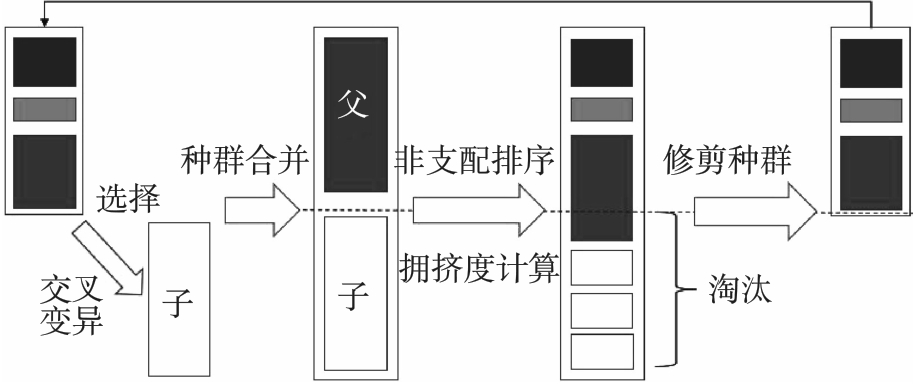
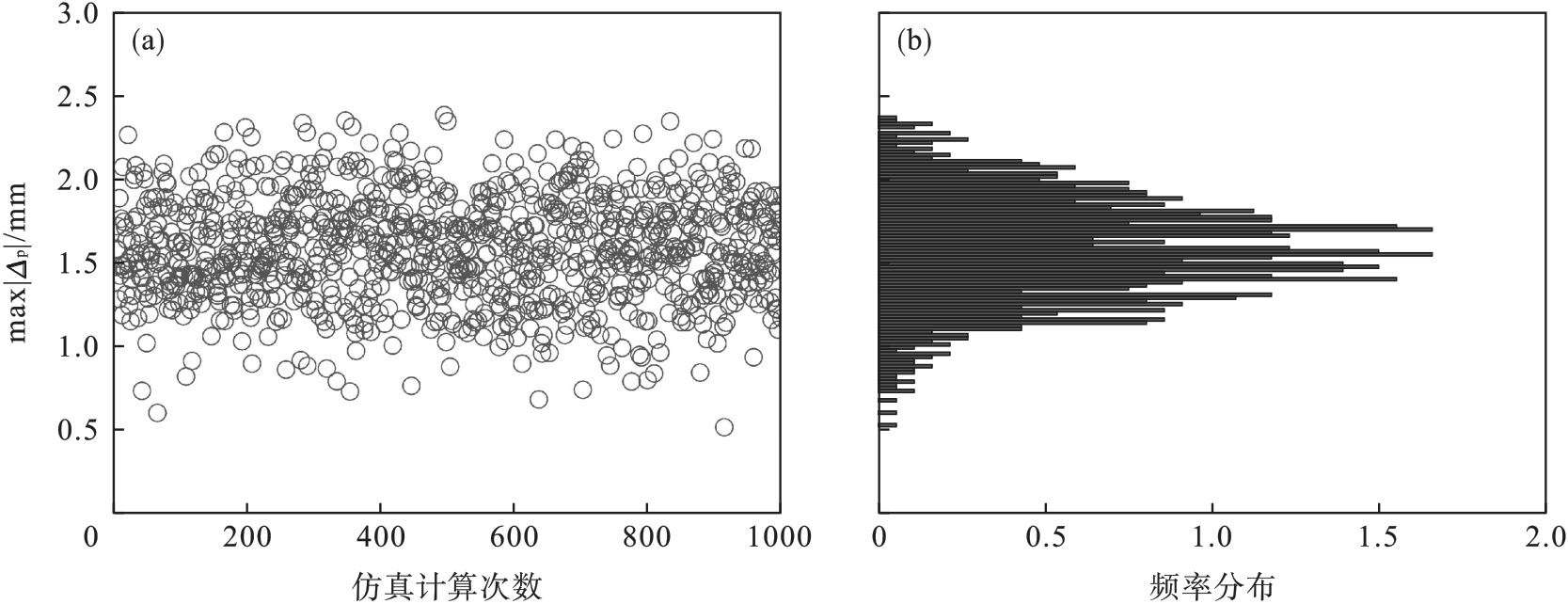
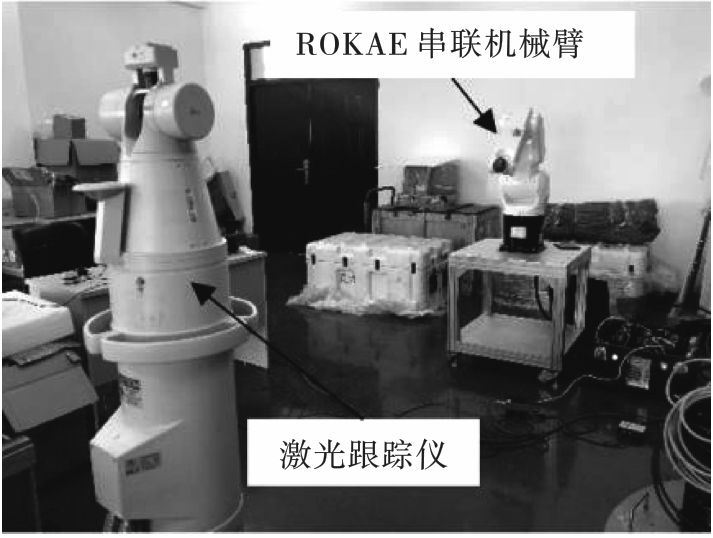
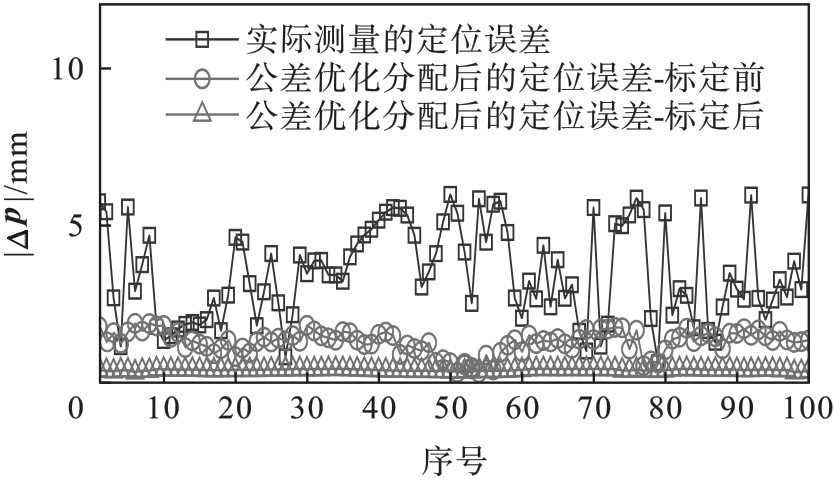
为了提高机器人末端执行器的几何定位精度,在机器人精度的初始设计阶段合理分配几何参数公差,提出了一种带精英策略的快速非支配排序遗传算法(NSGA-II)的以成本与精度为目标的多目标公差优化分配方法.以ROKAE XB7型6自由度串联机器人为研究对象,分别基于遗传算法(GA)的最小成本单目标公差优化分配方法和NSGA-II的多目标公差优化分配方法对DH(Denavit?Hartenberg)参数的公差优化分配.在精度设计目标和遗传算法参数设置相同的情况下,与基于遗传算法的最小成本的几何参数公差优化分配相比,基于NSGA-II的多目标公差优化分配能够给出不同制造成本和不同精度设计要求的一系列最优解,在得到同等制造成本和机器人精度的情况下,公差的容错松弛率相对较高,参数公差优化分配的结果更优.
中图分类号: