东北大学学报(自然科学版) ›› 2024, Vol. 45 ›› Issue (10): 1435-1442.DOI: 10.12068/j.issn.1005-3026.2024.10.009
• 机械工程 • 上一篇
梁乾坤1, 蔡衍2( ), 宋锦春1, 陈杰1
), 宋锦春1, 陈杰1
Qian-kun LIANG1, Yan CAI2(), Jin-chun SONG1, Jie CHEN1
摘要:
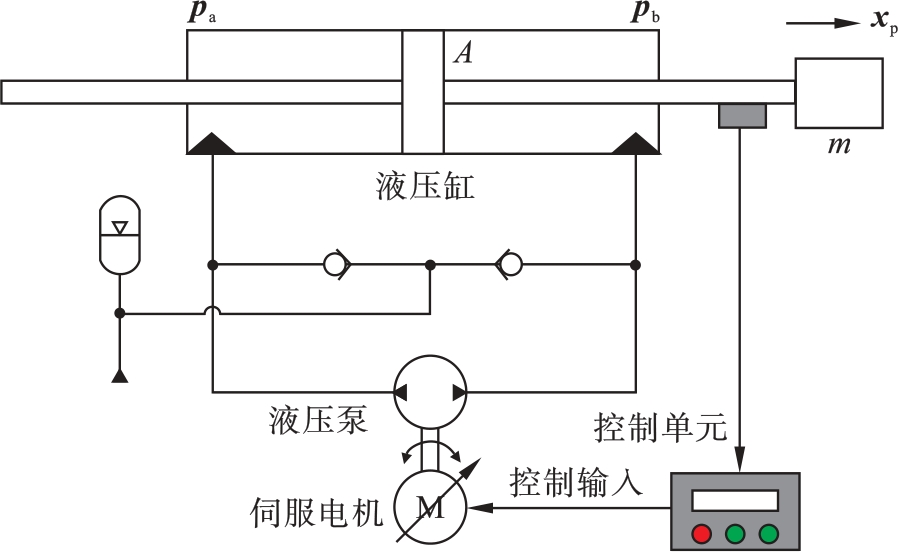
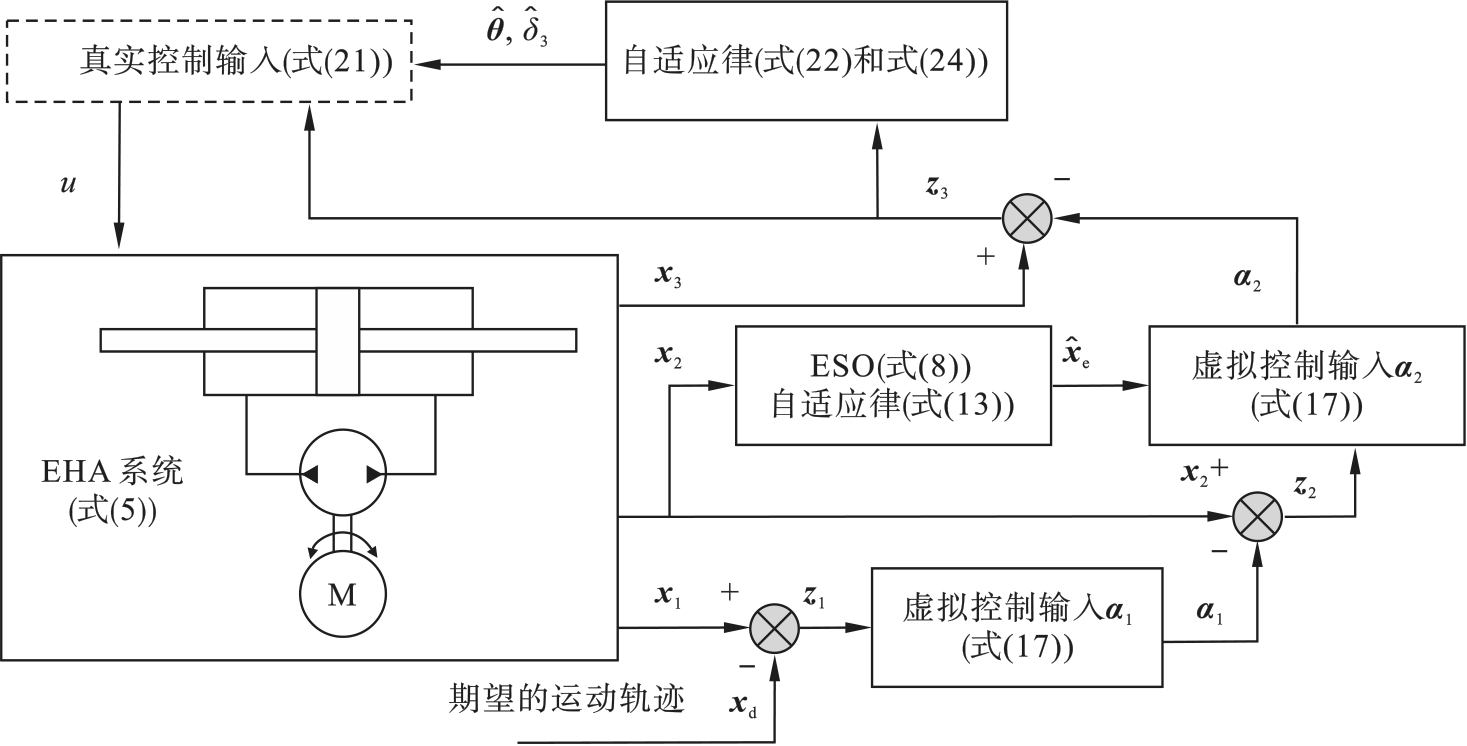
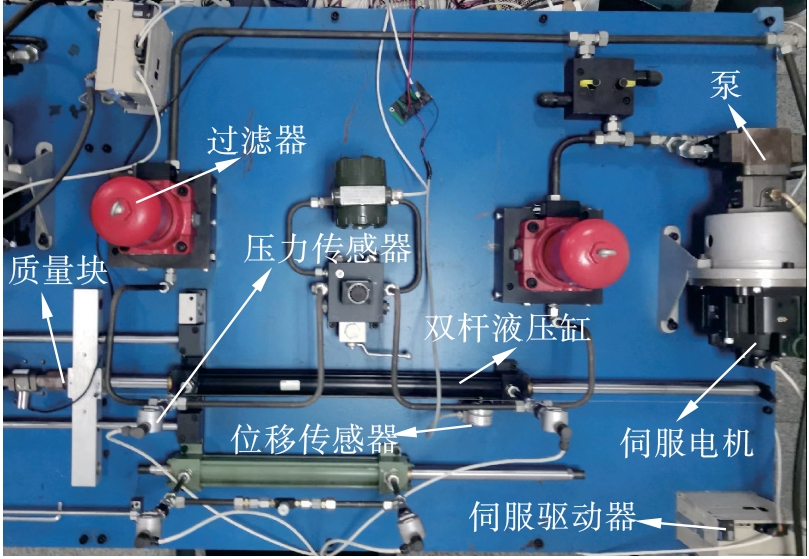
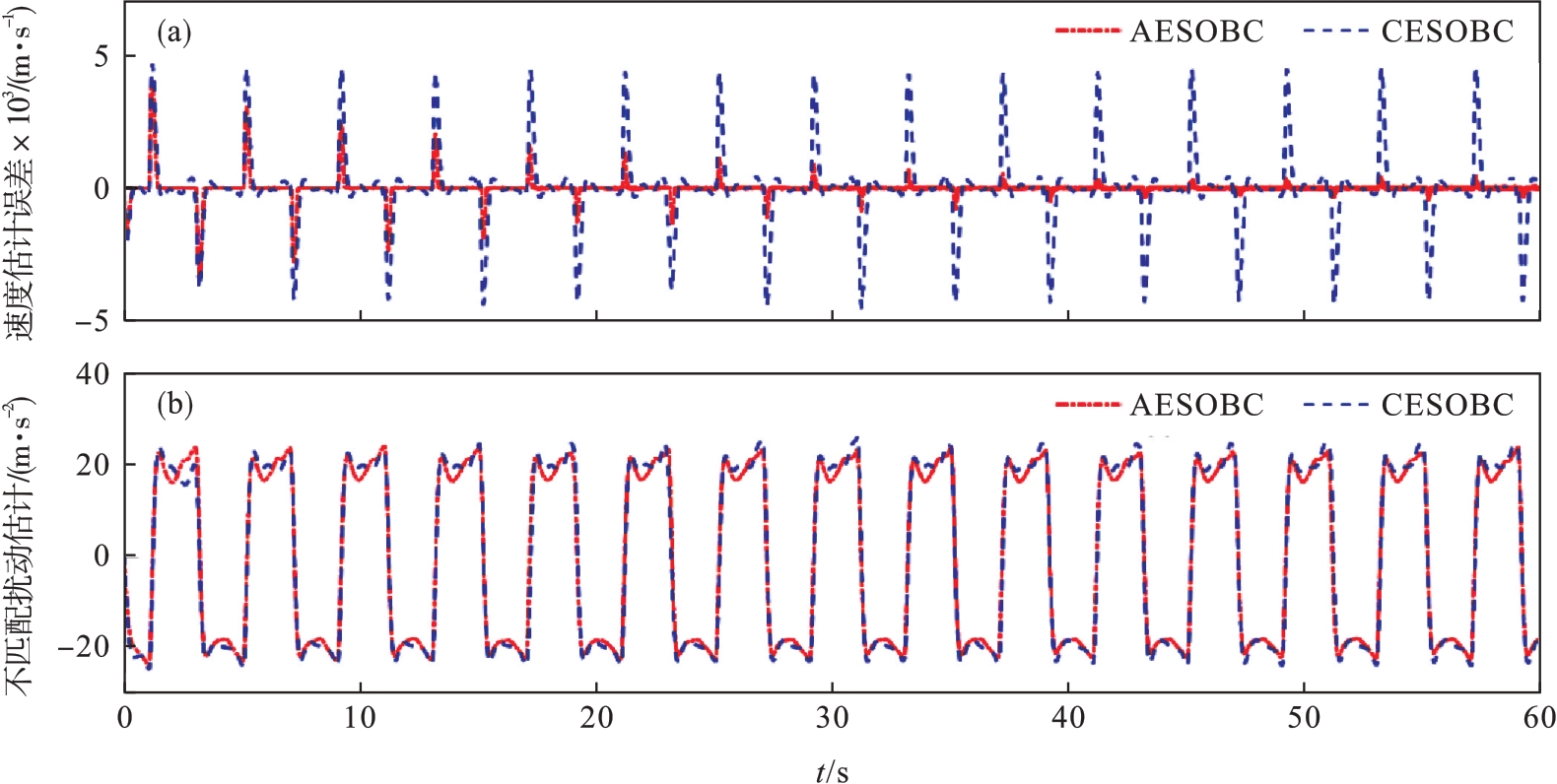
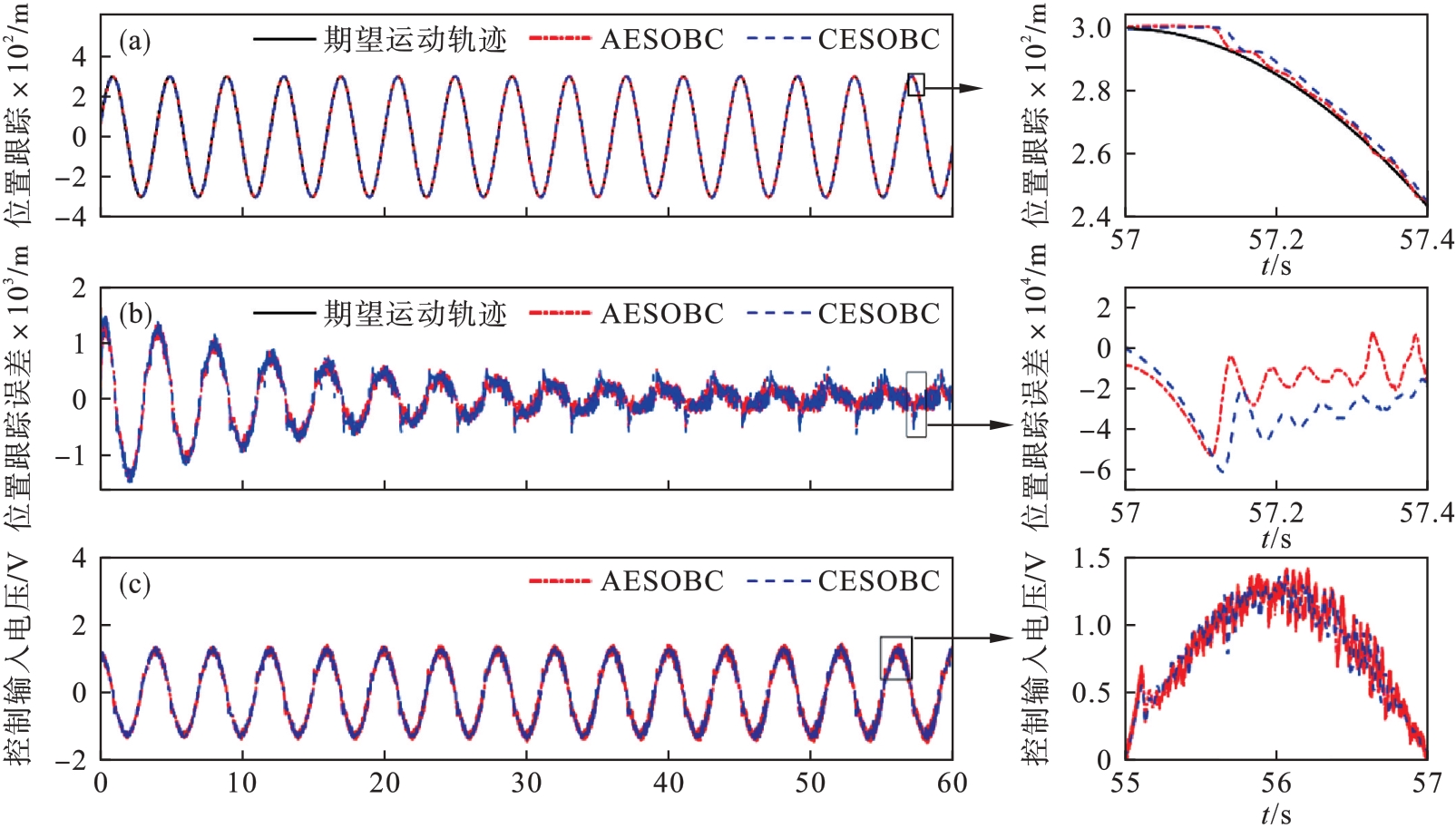
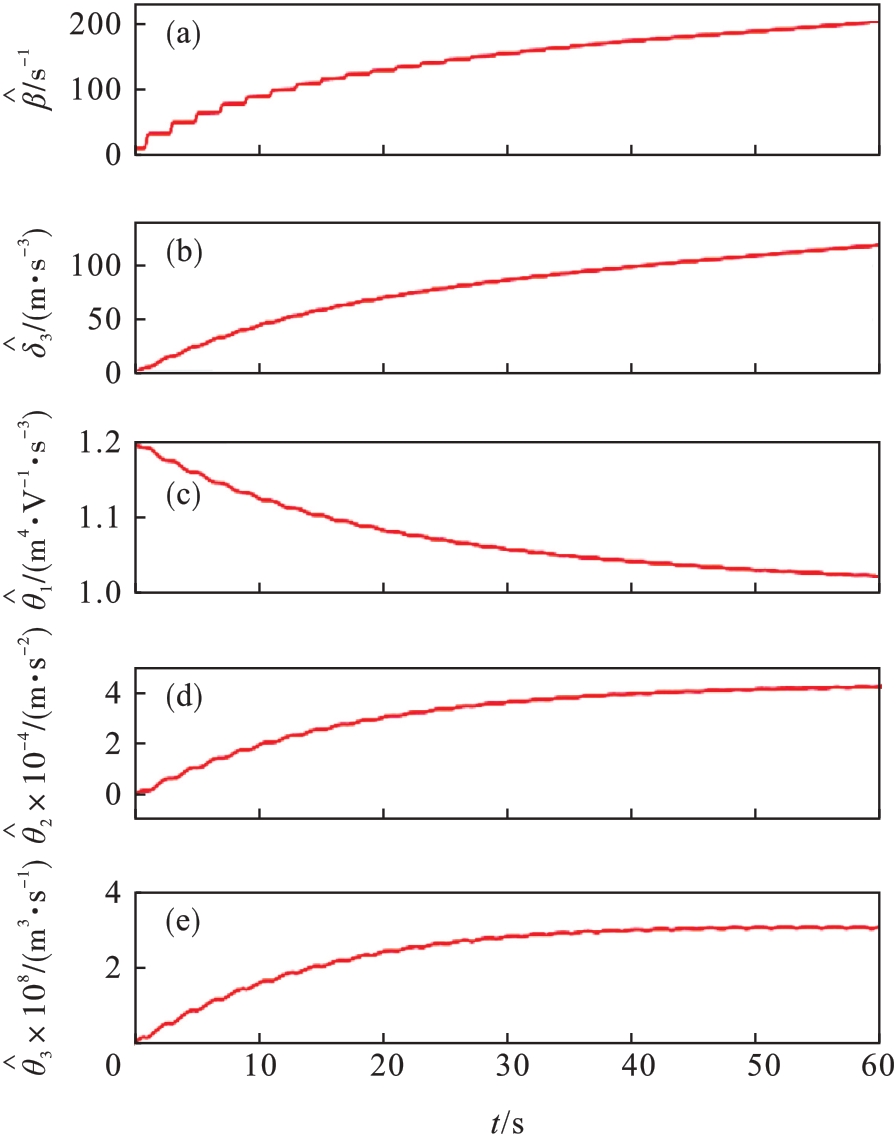
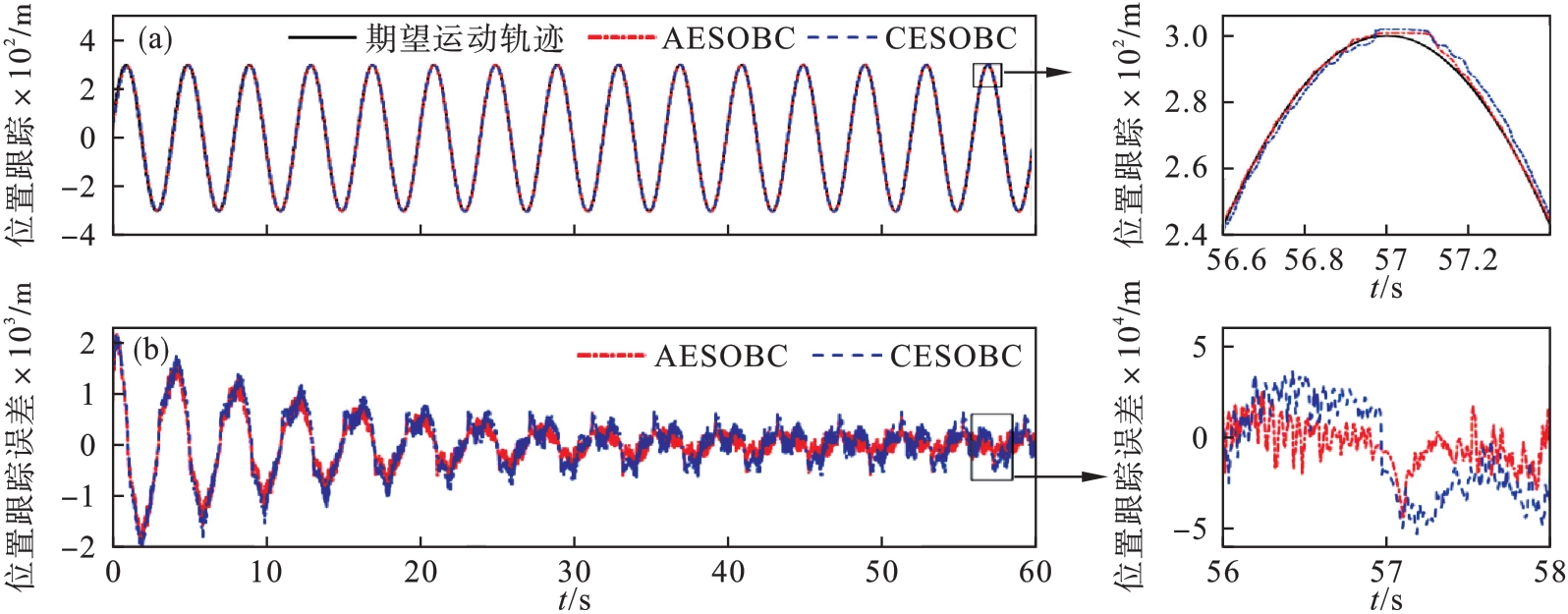
针对具有参数不确定性、不匹配和匹配的时变扰动的电液执行器(electro?hydraulic actuator,EHA)系统,提出了一种渐近跟踪控制策略.首先,构造了一个扩展状态观测器(extended state observer,ESO)获得对不匹配时变扰动的精确估计及补偿;该ESO通过在经典ESO中引入鲁棒自适应项,得到了渐近估计结果,降低了鲁棒增益选择的保守性.然后,设计一个鲁棒自适应项来估计匹配扰动的上界,以消除匹配时变扰动的影响.此外,自适应律用于估计参数不确定性.通过李雅普诺夫稳定性理论证明了跟踪误差能渐近收敛至零.最后,通过仿真和实验验证了所提控制策略的有效性.
中图分类号: