东北大学学报(自然科学版) ›› 2025, Vol. 46 ›› Issue (3): 1-11.DOI: 10.12068/j.issn.1005-3026.2025.20239039
• 信息与控制 • 下一篇
裴玉龙1, 翟双柱2
收稿日期:2023-08-02
出版日期:2025-03-15
发布日期:2025-05-29
作者简介:裴玉龙(1961—),男,黑龙江桦川人,东北林业大学教授,博士生导师.
Yu-long PEI1, Shuang-zhu ZHAI2
Received:2023-08-02
Online:2025-03-15
Published:2025-05-29
摘要:
针对自动驾驶车辆在冰雪路面易失稳的问题,提出改进的快速扩展随机树(RRT)路径规划算法.首先,建立冰雪路面车辆动力学模型,引入路面附着系数;然后,采用结合车头指向及转向角的全局目标偏向性采样,结合避撞检测与速度-附着系数下的最大曲率约束,改善传统RRT算法问题;最后,使用双五次多项式平滑路径,满足稳定性、制动器约束及舒适性.通过MATLAB-Simulink与CarSim联合仿真,比较改进RRT算法与传统算法在多场景条件下的性能.实验表明,改进RRT算法显著提升路径平滑度,降低曲率突变,用时短、成功率高,且在冰雪路面行驶时稳定性良好.
中图分类号:
裴玉龙, 翟双柱. 冰雪路面条件下多场景自动驾驶车辆主动避障路径规划[J]. 东北大学学报(自然科学版), 2025, 46(3): 1-11.
Yu-long PEI, Shuang-zhu ZHAI. Active Obstacle Avoidance Path Planning for Multi-scenario Autonomous Vehicles Under Icy and Snowy Road Conditions[J]. Journal of Northeastern University(Natural Science), 2025, 46(3): 1-11.
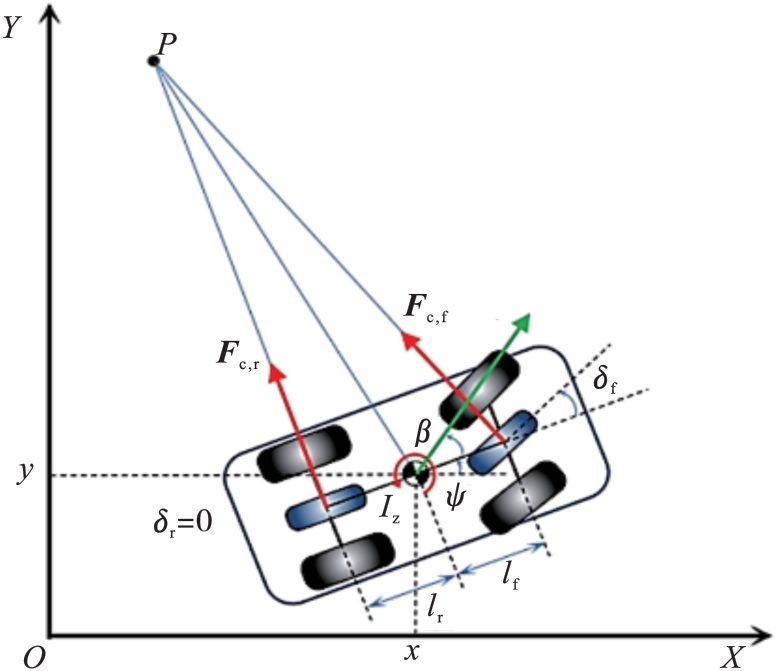
图1 简化二自由度车辆动力学模型
Fig.1 Simplified two-degree of freedom vehicle dynamical model

图2 魔术公式轮胎模型的输入和输出变量
Fig.2 Input and output variables of magic formula tire model
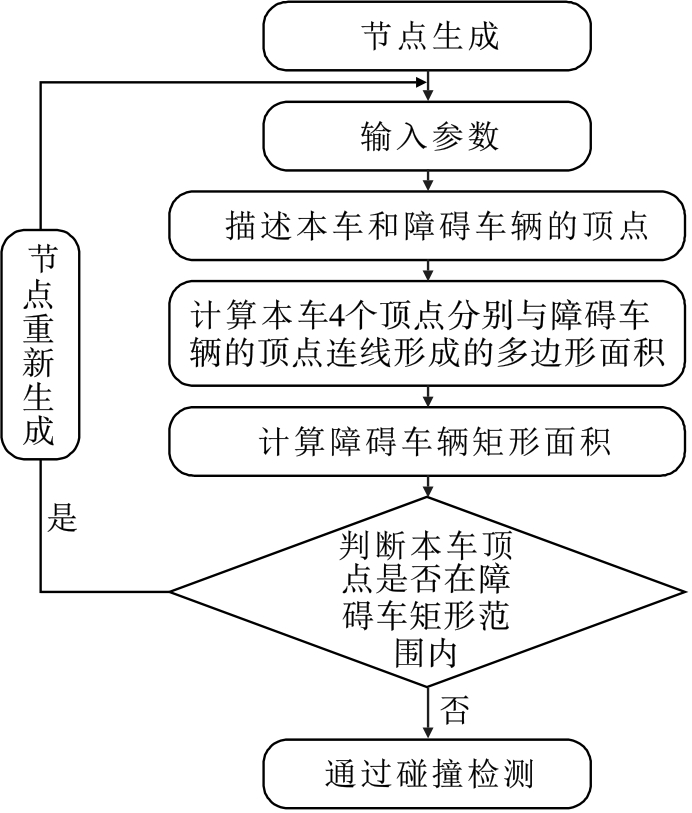
图3 碰撞检测流程
Fig.3 Flow chart of collision detection
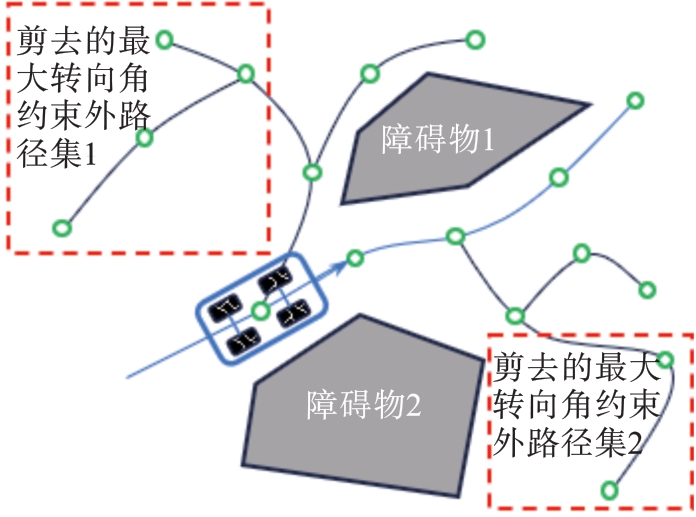
图4 曲率约束剪枝策略示意图
Fig.4 Schematic diagram of the curvature- constrained pruning strategy
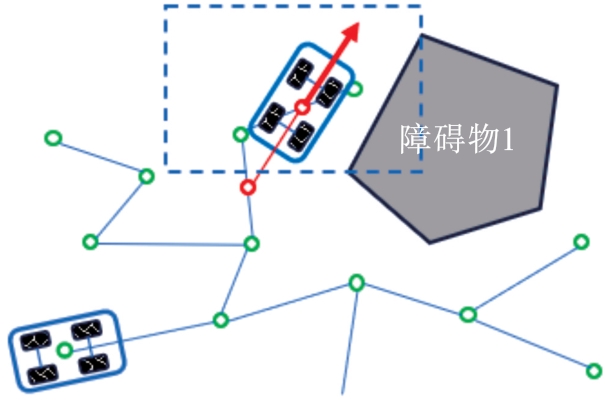
图5 曲率约束移枝策略示意图
Fig.5 Schematic diagram of the curvature-constrained branching strategy
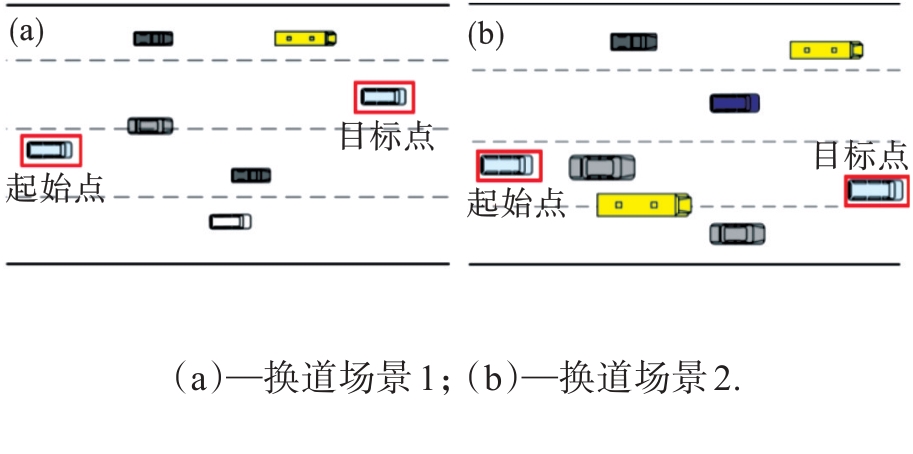
图6 静态换道场景
Fig.6 Static lane changing scenario
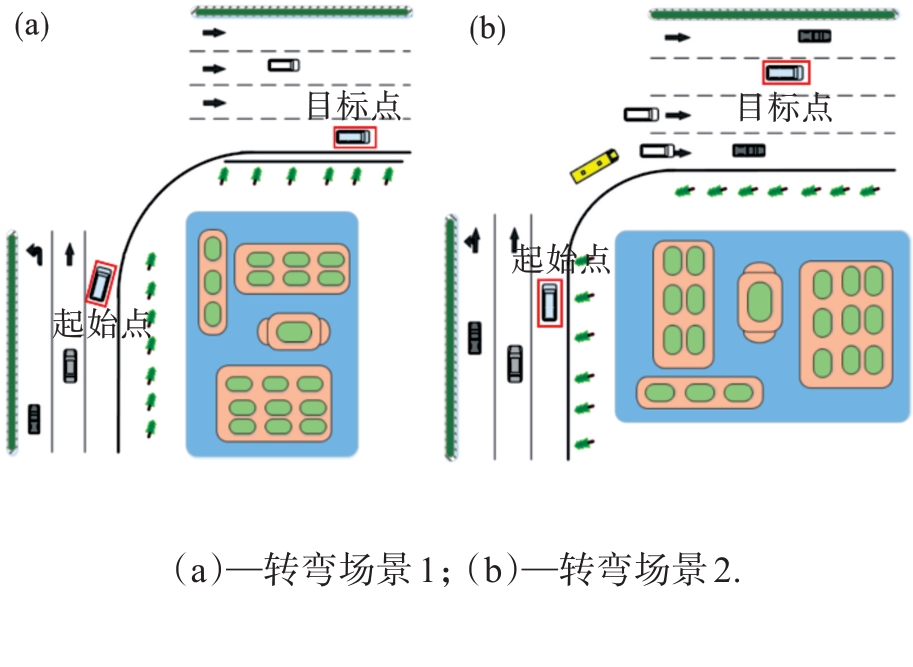
图7 静态转弯场景
Fig.7 Static turning scenario
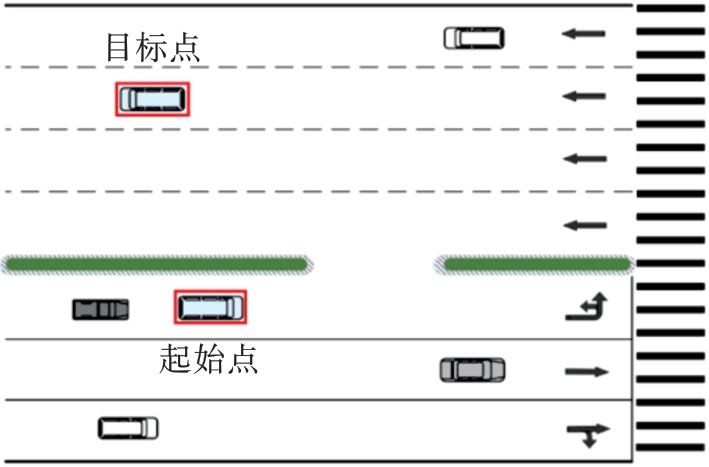
图8 静态掉头场景
Fig.8 Static U-turn scenario
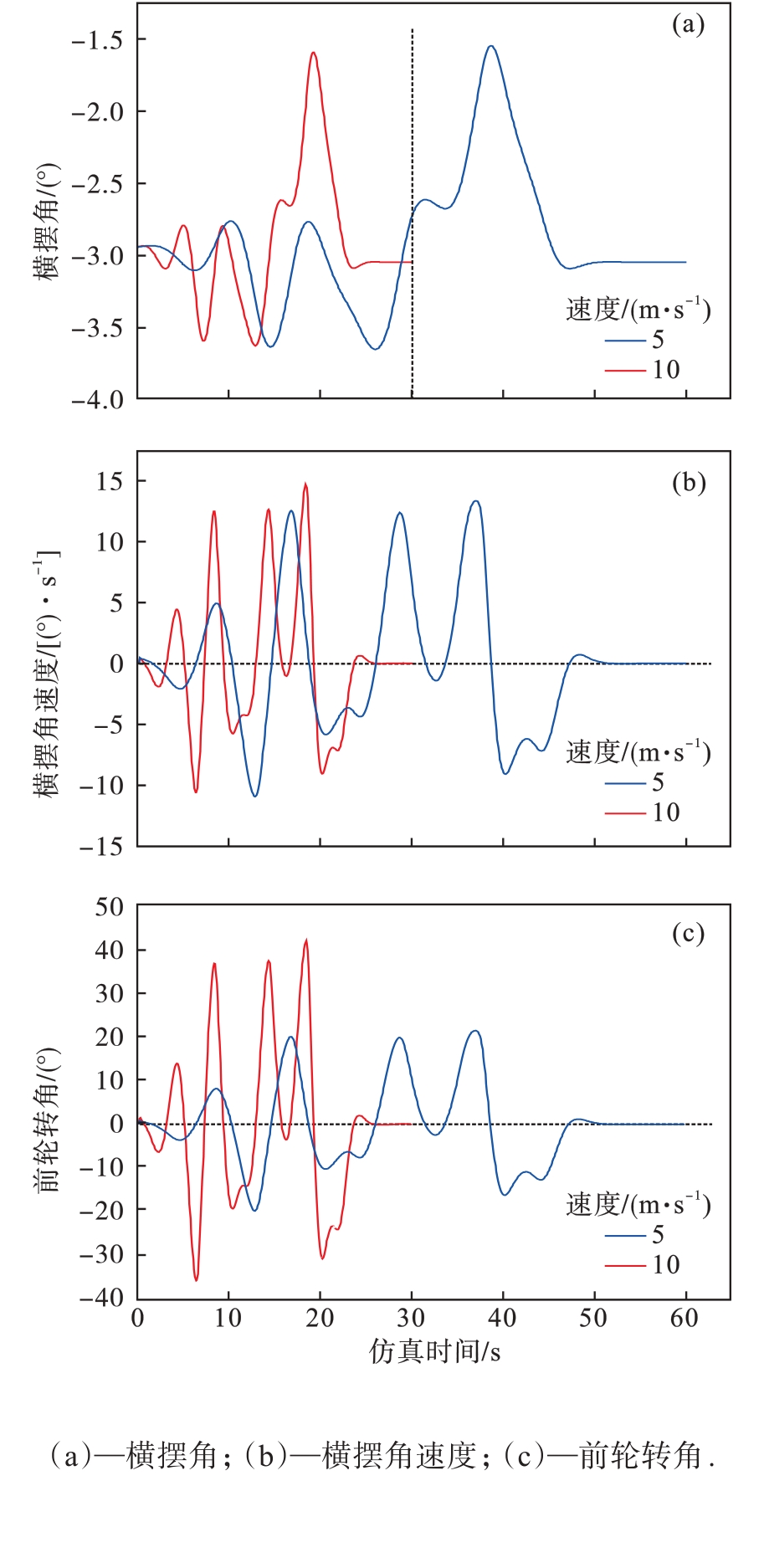
图9 换道场景1车辆动力学仿真参数
Fig.9 Dynamics simulation parameters of vehicle in lane change scenario 1
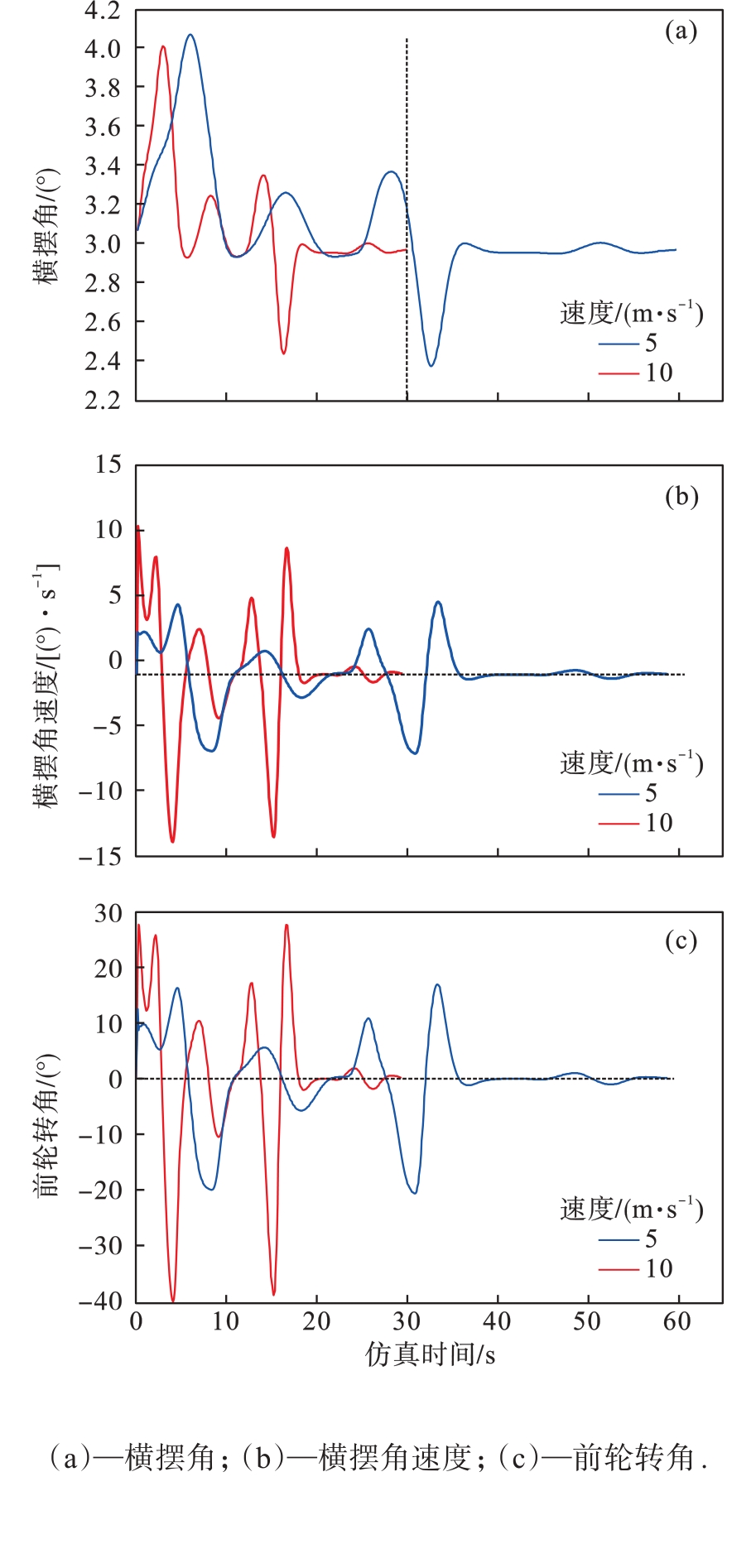
图10 换道场景2车辆动力学仿真参数
Fig.10 Dynamics simulation parameters of vehicle in lane change scenario 2
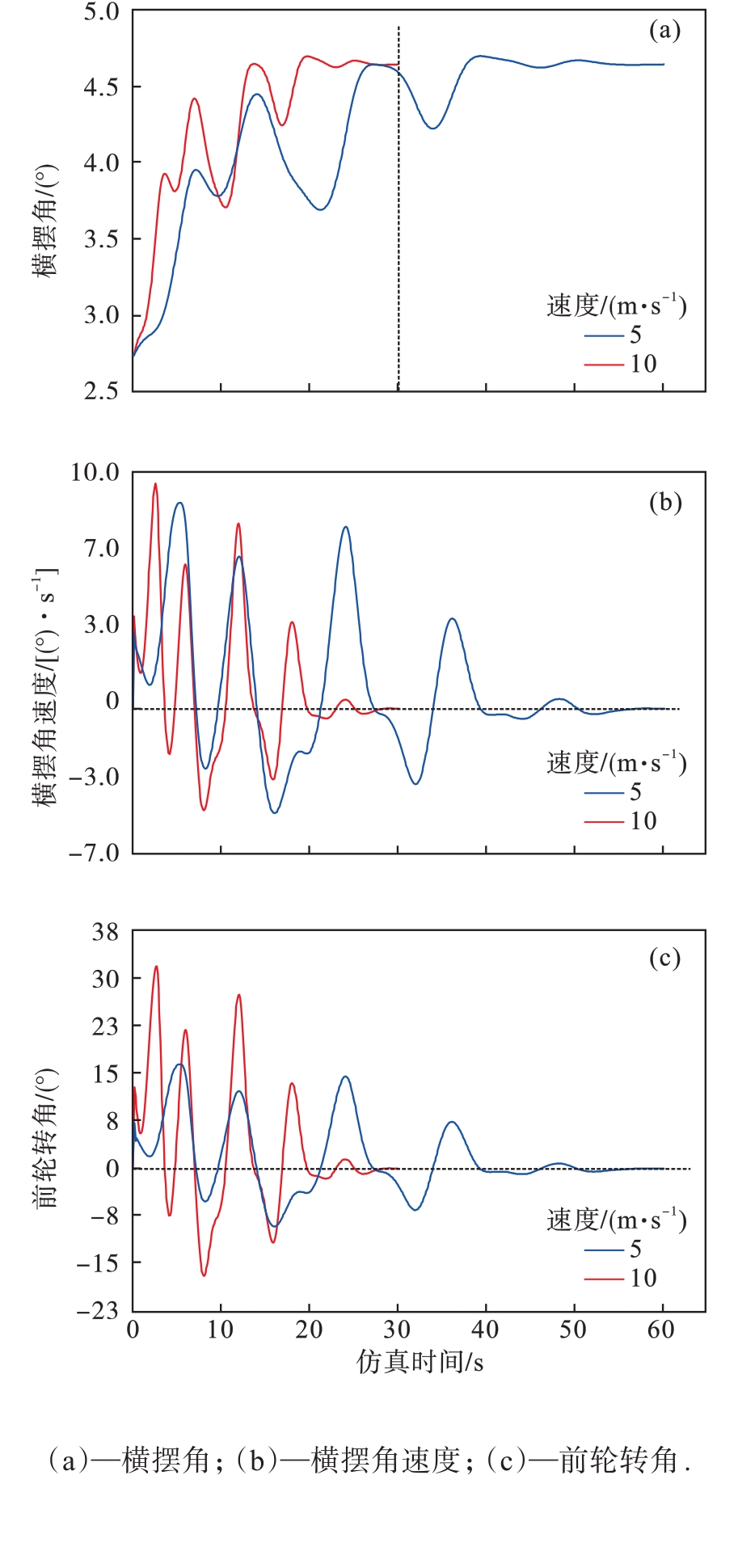
图11 转弯场景1车辆动力学仿真参数
Fig.11 Dynamics simulation parameters of vehicle in turning scenario 1
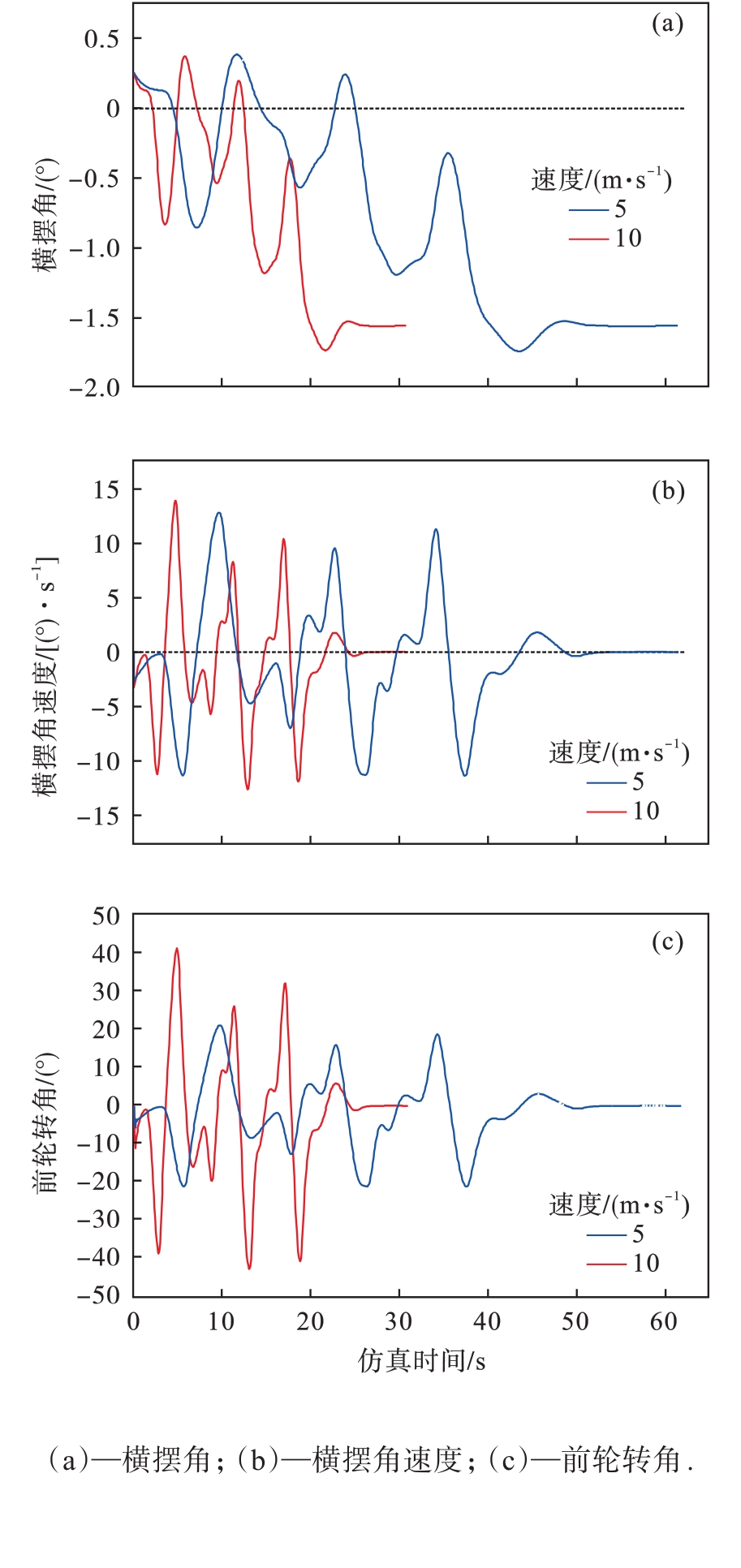
图12 转弯场景2车辆动力学仿真参数
Fig.12 Dynamics simulation parameters of vehicle in turning scenario 2
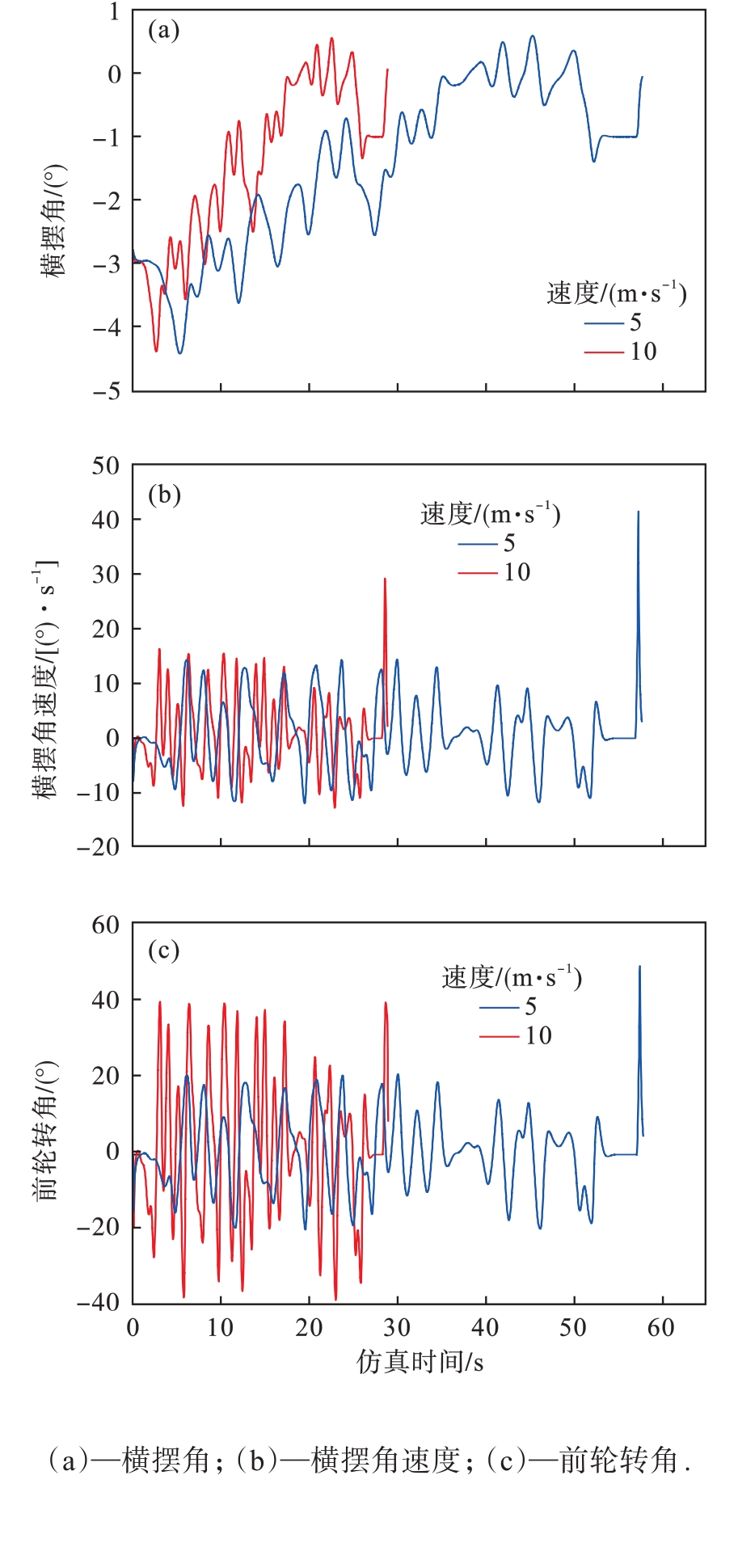
图13 掉头场景车辆动力学仿真参数
Fig.13 Dynamics simulation parameters of vehicle in U-turn scenario
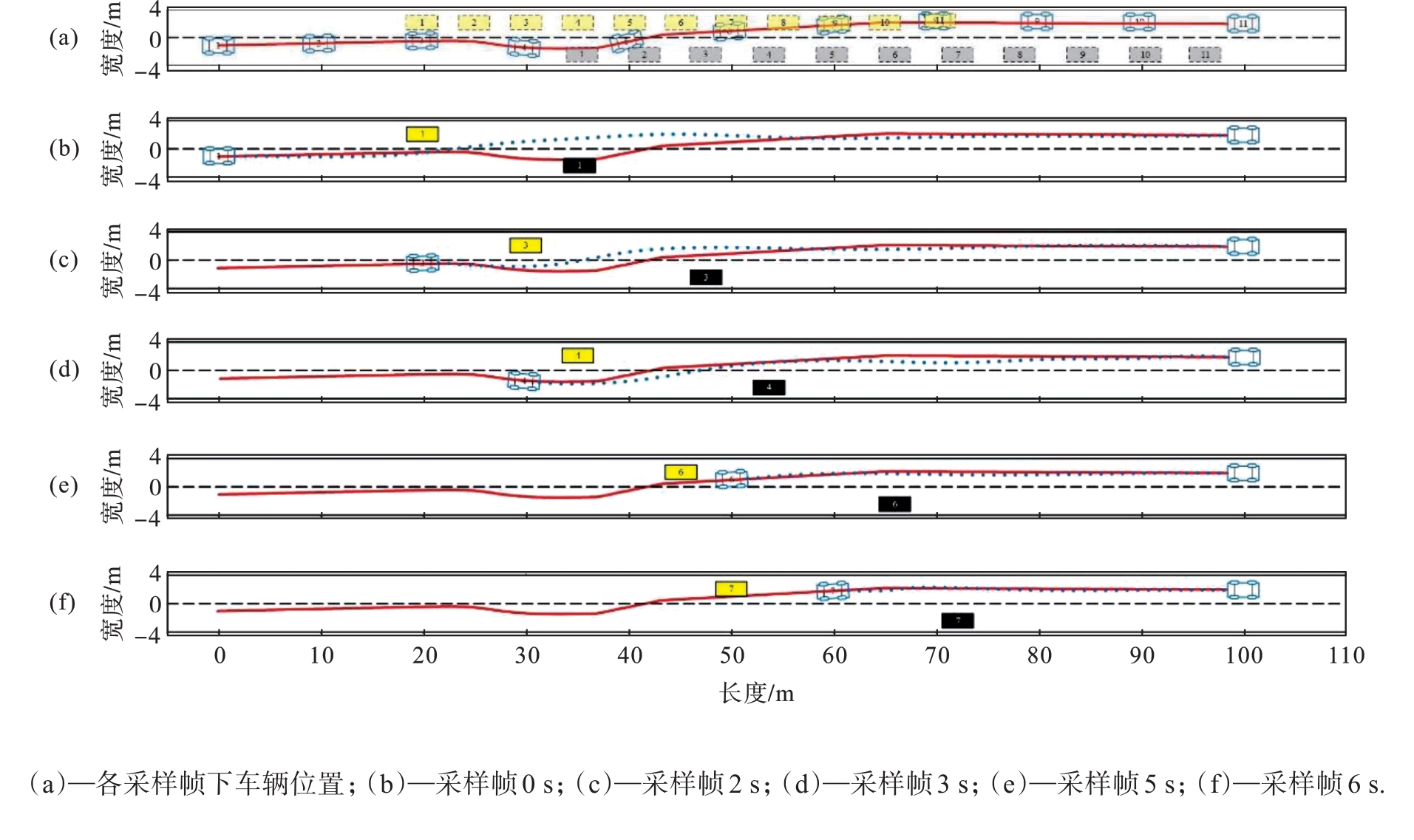
图14 动态路径规划仿真结果
Fig.14 Simulation results of dynamic path planning
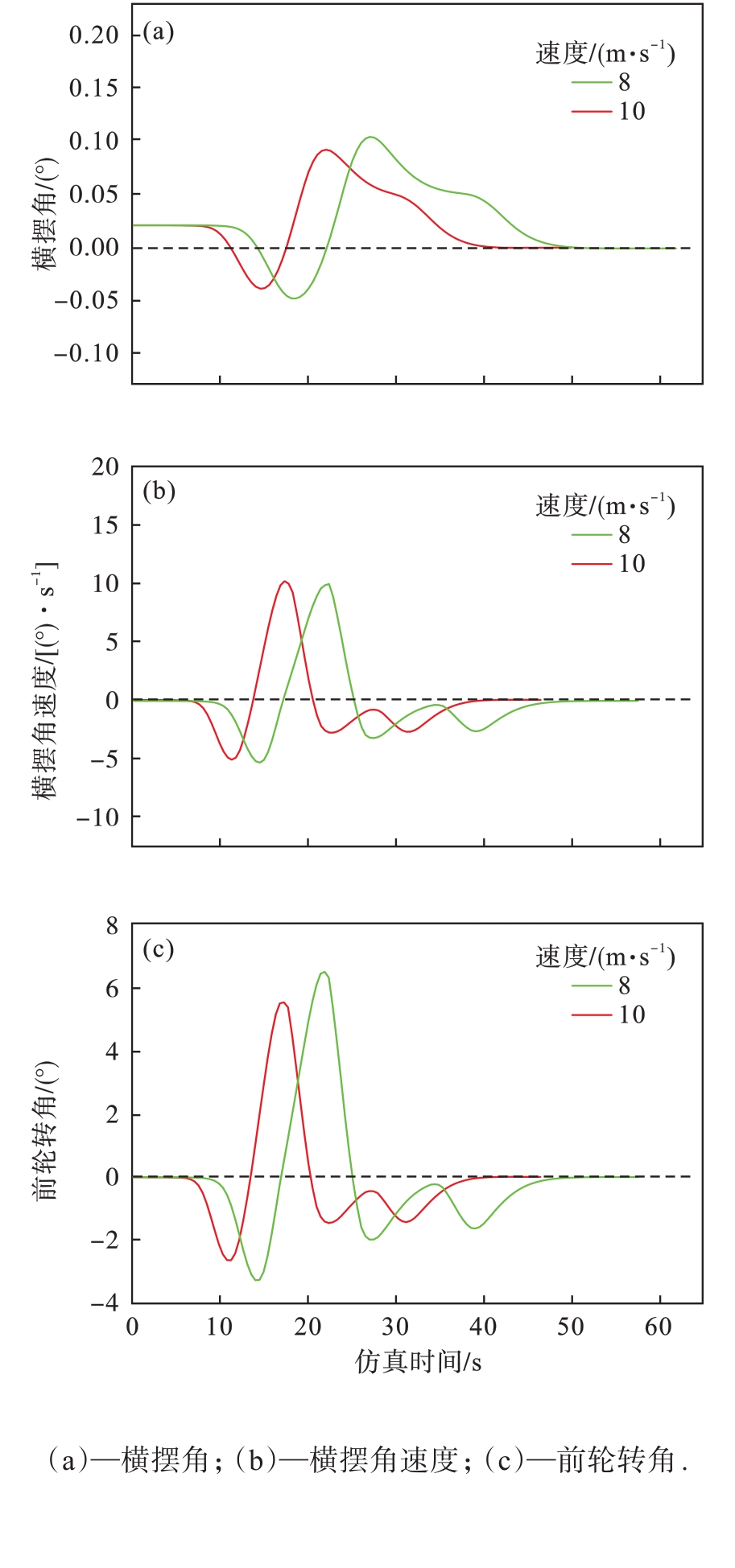
图15 动态场景下车辆动力学仿真参数变化
Fig.15 Changes of dynamics simulation parameters of vehicle in a dynamic scenario
| 1 | Dijkstra E W. A note on two problems in connexion with graphs[M]//Edsger Wybe Dijkstra. New York: ACM, 2022. |
| 2 | Hart P E, Nilsson N J, Raphael B. A formal basis for the heuristic determination of minimum cost paths[J]. IEEE Transactions on Systems Science and Cybernetics, 1968, 4(2): 100-107. |
| 3 | Chi W Z, Ding Z Y, Wang J K,et al. A generalized Voronoi diagram-based efficient heuristic path planning method for RRTs in mobile robots[J]. IEEE Transactions on Industrial Electronics, 2022, 69(5): 4926-4937. |
| 4 | Wang J K, Chi W Z, Li C M, et al. Efficient robot motion planning using bidirectional-unidirectional RRT extend function[J]. IEEE Transactions on Automation Science and Engineering, 2022, 19(3): 1859-1868. |
| 5 | Hauser K.Lazy collision checking in asymptotically-optimal motion planning[C]//IEEE International Conference on Robotics and Automation(ICRA). Seattle, 2015: 2951-2957. |
| 6 | Lai T, Morere P, Ramos F, et al. Bayesian local sampling-based planning[J]. IEEE Robotics and Automation Letters, 2020, 5(2): 1954-1961. |
| 7 | Karaman S, Frazzoli E. Sampling-based algorithms for optimal motion planning[J]. The International Journal of Robotics Research, 2011, 30(7): 846-894. |
| 8 | Song Q, Zhao Q L, Wang S X, et al. Dynamic path planning for unmanned vehicles based on fuzzy logic and improved ant colony optimization[J]. IEEE Access, 2020, 8: 62107-62115. |
| 9 | Li R H, Chang Y L, Wang Z C. Study of optimal allocation of water resources in Dujiangyan irrigation district of China based on an improved genetic algorithm[J]. Water Supply, 2021, 21(6): 2989-2999. |
| 10 | 邵琪,时维国.基于改进蚁群算法的机器人路径规划研究[J].现代制造工程,2023(6):46-51. |
| Shao Qi, Shi Wei-guo. Research on robot path planning based on improved ant colony algorithm[J]. Modern Manufacturing Engineering, 2023(6): 46-51. | |
| 11 | Yu Z H, Si Z J, Li X B, et al. A novel hybrid particle swarm optimization algorithm for path planning of UAVs[J]. IEEE Internet of Things Journal, 2022, 9(22): 22547-22558. |
| 12 | La Valle S M, Kuffner J J. Randomized kinodynamic planning[C]// IEEE International Conference on Robotics and Automation. Detroit: 1999: 473-479. |
| 13 | 宋金泽,戴斌,单恩忠,等.一种改进的RRT路径规划算法[J].电子学报,2010,38(2A):225-228. |
| Song Jin-ze, Dai Bin, Shan En-zhong, et al. An improved RRT path planning algorithm[J]. Acta Electronica Sinica, 2010, 38(2A): 225-228. | |
| 14 | Chang X F, Wang Y Z, Yi X D, et al. SARRT: a structure-aware RRT-based approach for 2D path planning[C]//IEEE International Conference on Robotics and Biomimetics. Zhuhai, 2015: 1698-1703. |
| 15 | Kuffner J J, LaValle S M. RRT-connect: an efficient approach to single-query path planning[C]//IEEE International Conference on Robotics and Automation. San Francisco, 2000: 995-1001. |
| 16 | Blanco J L, Bellone M, Gimenez-Fernandez A. TP-space RRT-kinematic path planning of non-holonomic any-shape vehicles[J]. International Journal of Advanced Robotic Systems, 2015, 12(5): 55. |
| 17 | Ghosh D, Nandakumar G, Narayanan K, et al. Kinematic constraints based Bi-directional RRT(KB-RRT) with parameterized trajectories for robot path planning in cluttered environment[C]//2019 International Conference on Robotics and Automation. Montreal. 2019: 8627-8633. |
| 18 | 毛丁丁,邓亚东.四轮转向智能车辆轨迹跟踪及稳定控制研究[J].机械科学与技术,2020,39(7):1094-1099. |
| Mao Ding-ding, Deng Ya-dong. Research on trajectory tracking and stability control of 4WS intelligent vehicle[J]. Mechanical Science and Technology for Aerospace Engineering, 2020, 39(7): 1094-1099. | |
| 19 | Bakker E, Nyborg L, Pacejka H B. Tyre modelling for use in vehicle dynamics studies[J/OL]. SAE Transactions, 1987: 190-204[2022-11-11]. . |
| 20 | 郑香美,高兴旺,赵志忠.基于“魔术公式”的轮胎动力学仿真分析[J].机械与电子,2012,30(9):16-20. |
| Zheng Xiang-mei, Gao Xing-wang, Zhao Zhi-zhong. Simulation analysis of tire dynamic based on “magic formula”[J]. Machinery & Electronics, 2012, 30(9): 16-20. | |
| 21 | 王中阳.冰雪路面下智能车辆自主换道决策规划与控制研究[D]. 淄博:山东理工大学,2020. |
| Wang Zhong-yang. Research on decision planning and control of autonomous lane change of intelligent vehicle on ice snow road[D]. Zibo:Shandong University of Technology, 2020. | |
| 22 | 交通运输部公路局, 中交第一公路勘察设计研究院有限公司. 公路工程技术标准: [S]. 北京: 人民交通出版社,2015. |
| Highway Bureau of Ministry of Transportation and Communications, CCCC First Highway Survey and Design Institute Co. Technical standard for highway engineering: [S]. Beijing: People’s Transportation Press, 2015. | |
| 23 | Song X G, Fan X, Cao Z Q, et al. A TC-RRT-based path planning algorithm for the nonholonomic mobile robots[C]//Chinese Control Conference. Dalian, 2017: 6638-6643. |
| 24 | Zhou J, Zheng H Y, Wang J M, et al. Multiobjective optimization of lane-changing strategy for intelligent vehicles in complex driving environments[J]. IEEE Transactions on Vehicular Technology, 2019, 69(2): 1291-1308. |
| 25 | 吴彬彬,罗峰.基于RRT*的智能车辆路径规划算法[J].机电一体化,2017,23(10):15-23. |
| Wu Bin-bin, Luo Feng. RRT*-based path planning algorithm for intelligent vehicle[J]. Mechatronics, 2017, 23(10): 15-23. | |
| 26 | 牛国臣,李文帅,魏洪旭.基于双五次多项式的智能汽车换道轨迹规划[J].汽车工程,2021,43(7):978-986,1004. |
| Niu Guo-chen, Li Wen-shuai, Wei Hong-xu. Intelligent vehicle lane changing trajectory planning based on double quintic polynomials[J]. Automotive Engineering, 2021, 43(7): 978-986,1004. | |
| 27 | 龚国铮,郑少武,钟思祺,等.基于预测模型的无人赛车路径规划算法研究[J].汽车技术,2022(7):32-41. |
| Gong Guo-zheng, Zheng Shao-wu, Zhong Si-qi, et al. Research on path planning algorithm of driverless race car based on predictive model[J]. Automobile Technology, 2022(7): 32-41. |
| [1] | 蒋启龙, 许健. 改进PSO-PH-RRT*算法在智能车路径规划中的应用[J]. 东北大学学报(自然科学版), 2025, 46(3): 12-19. |
| [2] | 徐金华, 汪飞, 韩飞, 李岩. 一种多车辆协同多植保无人机作业路径规划方法[J]. 东北大学学报(自然科学版), 2024, 45(2): 296-304. |
| [3] | 赵俊涛, 罗小川, 刘俊秘. 改进鲸鱼优化算法在机器人路径规划中的应用[J]. 东北大学学报(自然科学版), 2023, 44(8): 1065-1071. |
| [4] | 刘晓熙, 姜慧研, 骆敏. 面向肝癌消融术的多约束最优穿刺路径规划算法[J]. 东北大学学报(自然科学版), 2023, 44(7): 922-930. |
| [5] | 赵钊, 原培新, 唐俊文, 陈锦林. 基于改进SNN-HRL的智能体路径规划算法[J]. 东北大学学报(自然科学版), 2023, 44(11): 1548-1555. |
| [6] | 王海芳, 崔阳阳, 李鸣飞, 李广宇. 基于改进RRT*FN的移动机器人路径规划算法[J]. 东北大学学报(自然科学版), 2022, 43(9): 1217-1225. |
| [7] | 王振宇, 张荣闯, 于天彪. 圆柱直齿轮铣削加工无干涉刀具路径规划[J]. 东北大学学报(自然科学版), 2022, 43(7): 988-995. |
| [8] | 张禹, 李东升, 王志伟, 巩亚东. 基于图论和改进Dijkstra算法的STEP-NC复杂型腔最短刀具路径生成方法[J]. 东北大学学报:自然科学版, 2020, 41(9): 1285-1291. |
| [9] | 刘杰, 闫清东, 马越, 唐正华. 基于蚁群几何优化算法的全局路径规划[J]. 东北大学学报:自然科学版, 2015, 36(7): 923-928. |
| [10] | 黄月,吴成东,董晶晶,贾子熙. 基于WSN的灾难现场最优逃生路径规划[J]. 东北大学学报(自然科学版), 2013, 34(2): 162-165. |
| [11] | 张琦,马家辰,谢玮,马立勇. 基于改进蚁群算法的移动机器人路径规划[J]. 东北大学学报(自然科学版), 2013, 34(11): 1521-1524. |
| [12] | 高巍;赵海;罗桂兰;宋纯贺;. 一种AAPF算法及其在多机器人路径规划中的应用[J]. 东北大学学报(自然科学版), 2009, 30(5): 644-647. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||