东北大学学报(自然科学版) ›› 2025, Vol. 46 ›› Issue (12): 48-56.DOI: 10.12068/j.issn.1005-3026.2025.20240136
于华宇1, 朱文福2, 辛博1, 孙俊峰1
Hua-yu YU1, Wen-fu ZHU2, Bo XIN1, Jun-feng SUN1
摘要:
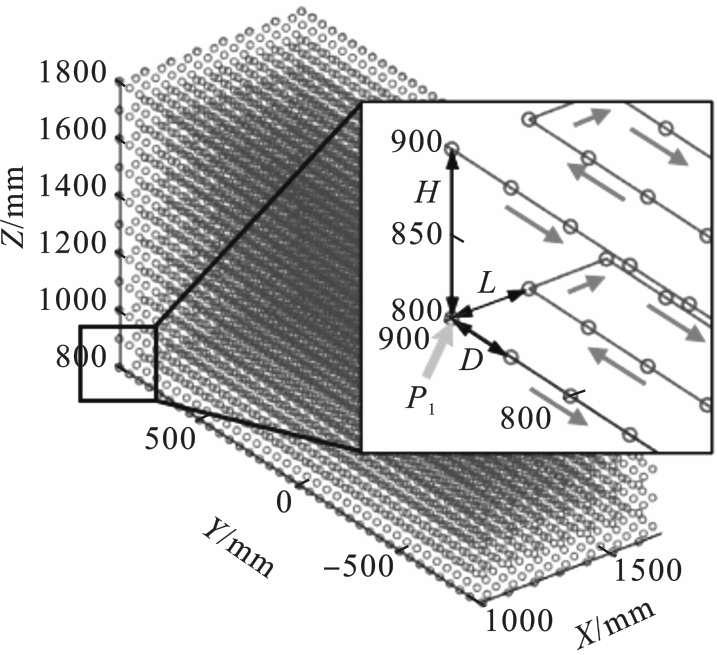
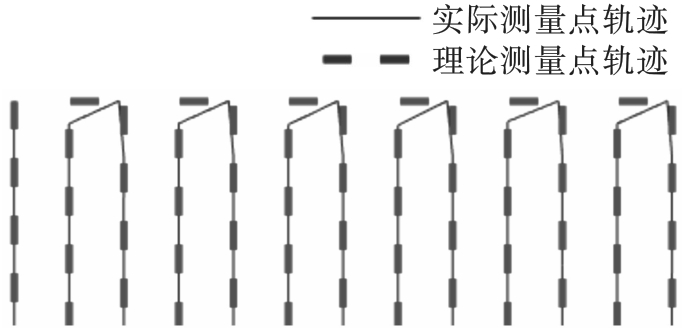
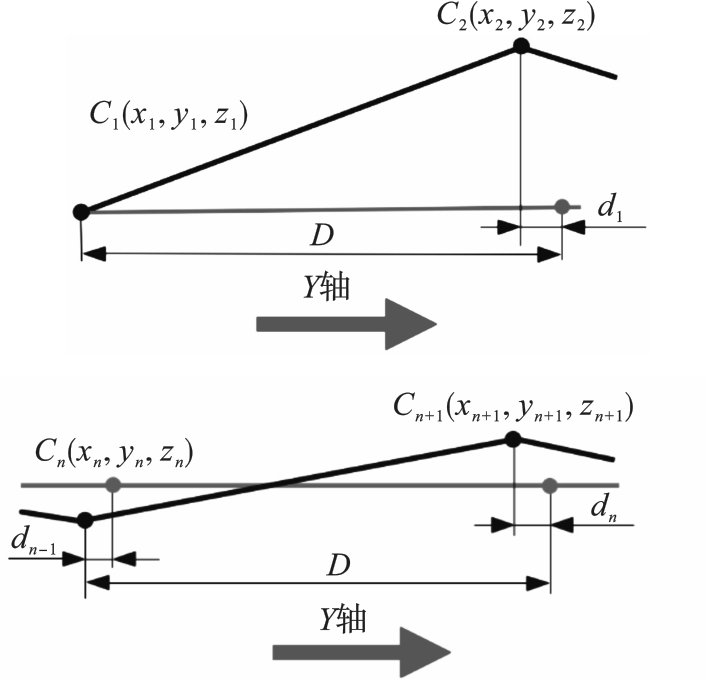
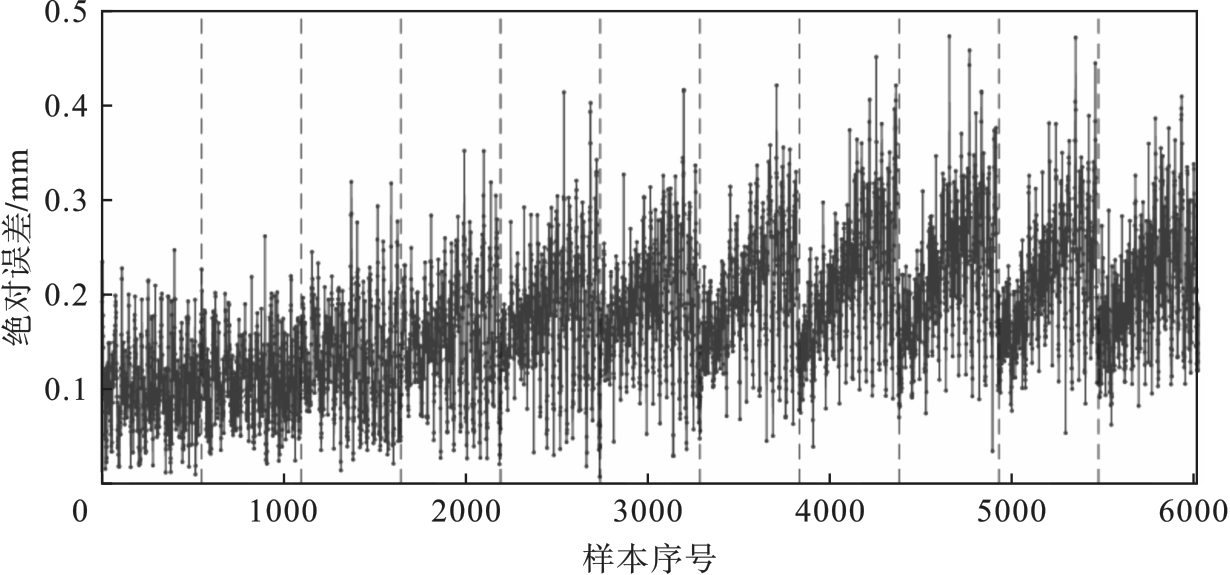
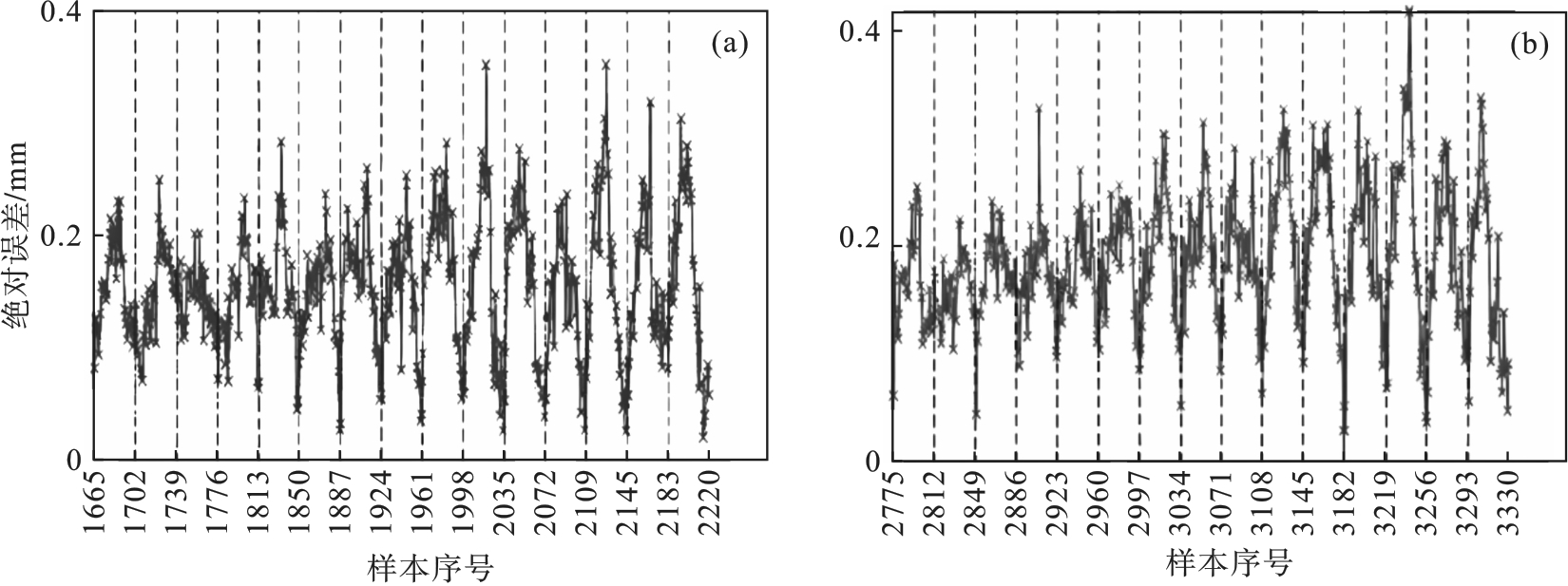
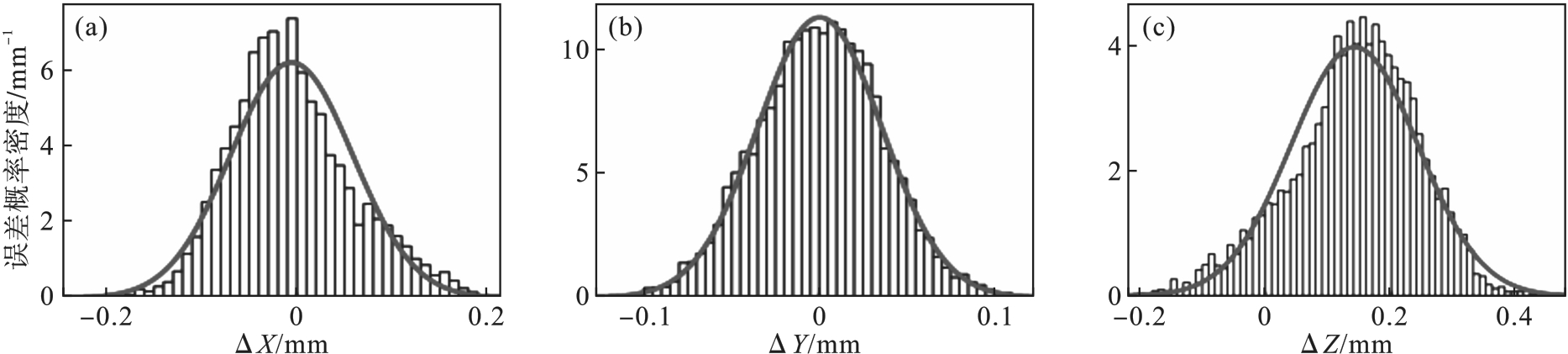
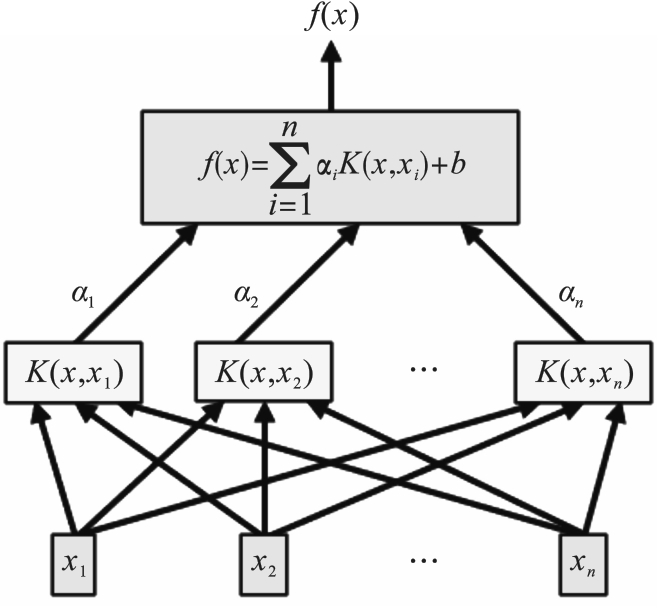
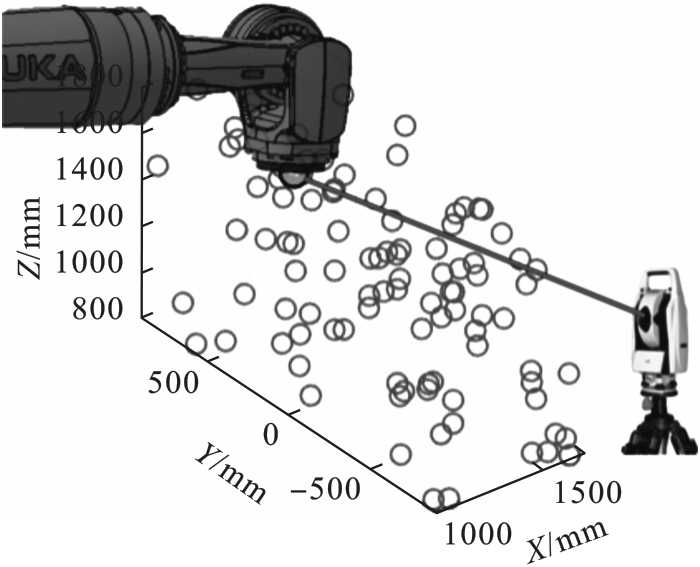
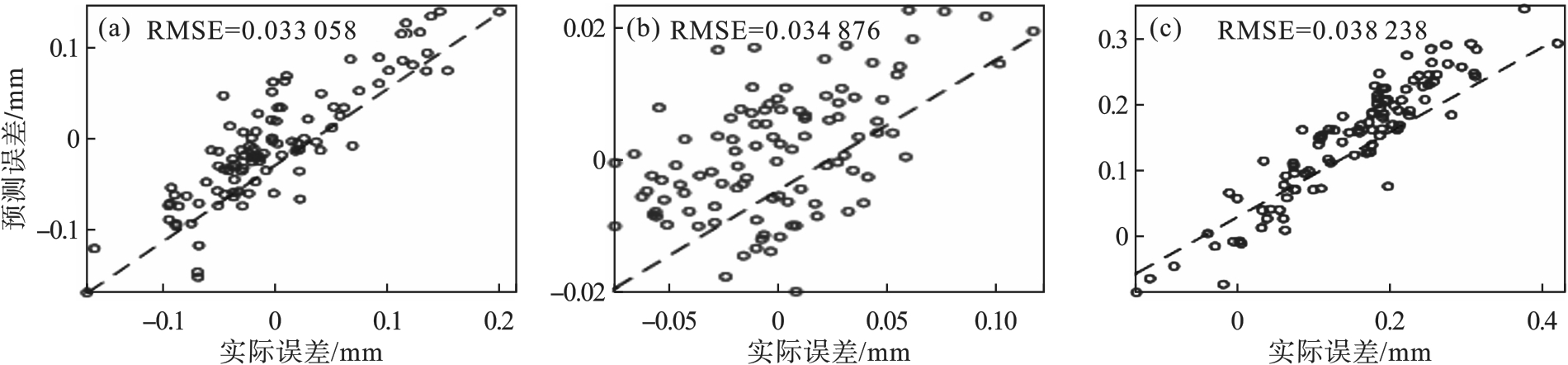
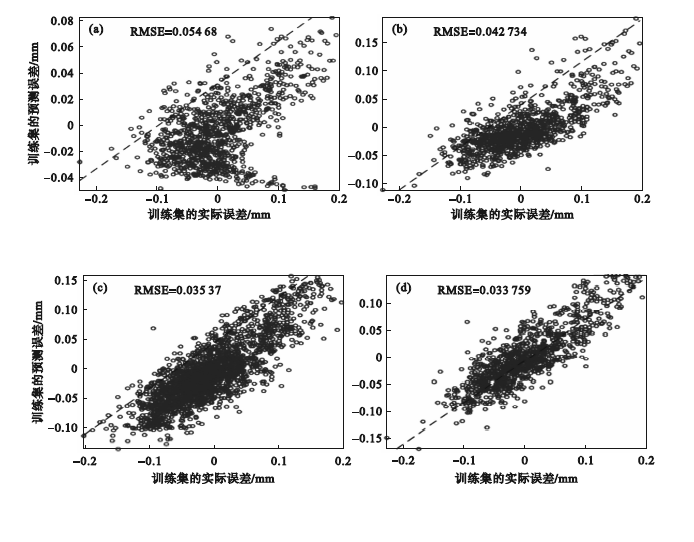
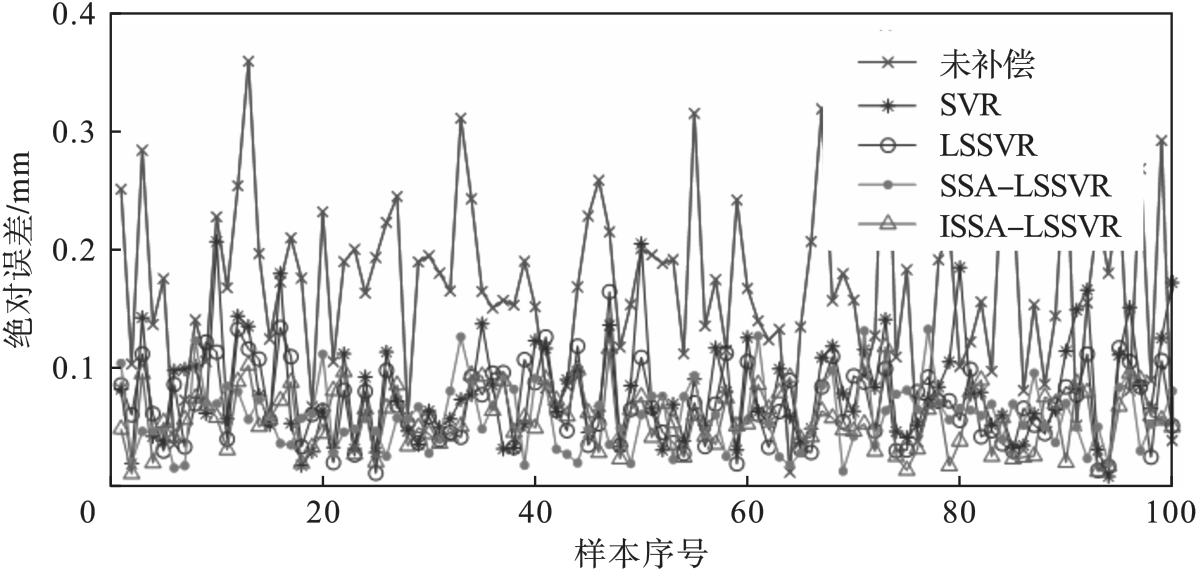
为提高6自由度(6-DoF)机器人的定位精度,提出一种6-DoF机器人定位误差预测和精度补偿方法.介绍了在机器人的高频工作区内的分层逐行采样方法,并建立累积测量误差修正公式提高测量的准确性.实测证明机器人工作位置直接影响绝对误差.为此,提出了基于改进麻雀搜索算法优化最小二乘支持向量回归(ISSA-LSSVR)算法的误差补偿模型,预测和修正机器人自身定位误差.结果表明,相较于支持向量回归(SVR)、最小二乘支持向量回归(LSSVR)和麻雀搜索算法优化最小二乘支持向量回归(SSA-LSSVR)算法,基于ISSA-LSSVR算法的误差补偿效果最好,机器人的绝对误差降低了65.68%,最大误差降低了68.95%.
中图分类号: