东北大学学报(自然科学版) ›› 2024, Vol. 45 ›› Issue (10): 1409-1416.DOI: 10.12068/j.issn.1005-3026.2024.10.006
• 机械工程 • 上一篇
李小彭1( ), 陈国文1, 尹猛2, 付嘉兴1
), 陈国文1, 尹猛2, 付嘉兴1
Xiao-peng LI1(), Guo-wen CHEN1, Meng YIN2, Jia-xing FU1
摘要:
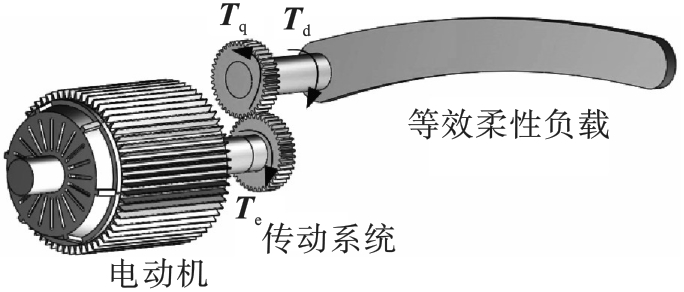
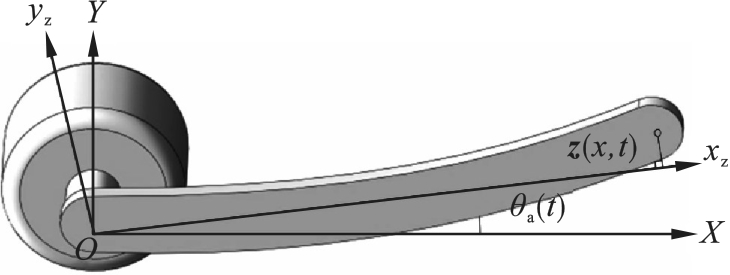
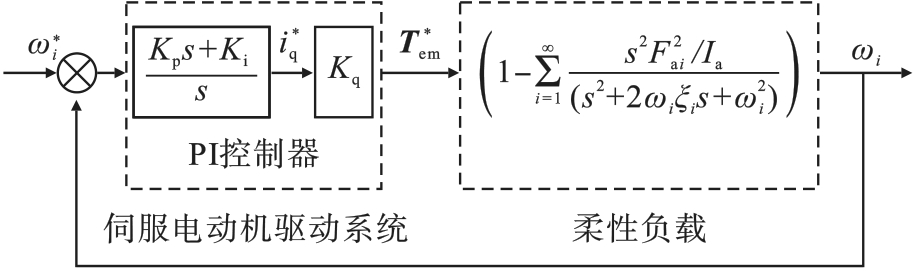
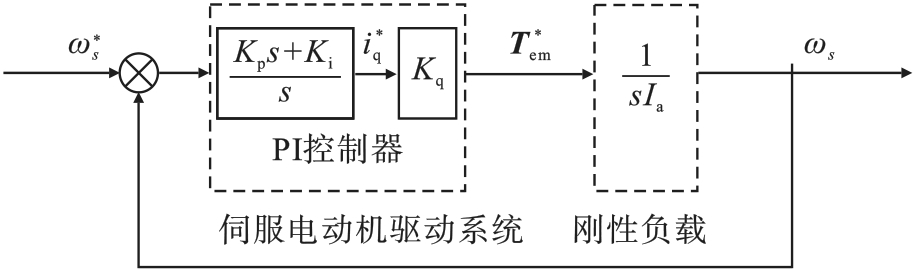
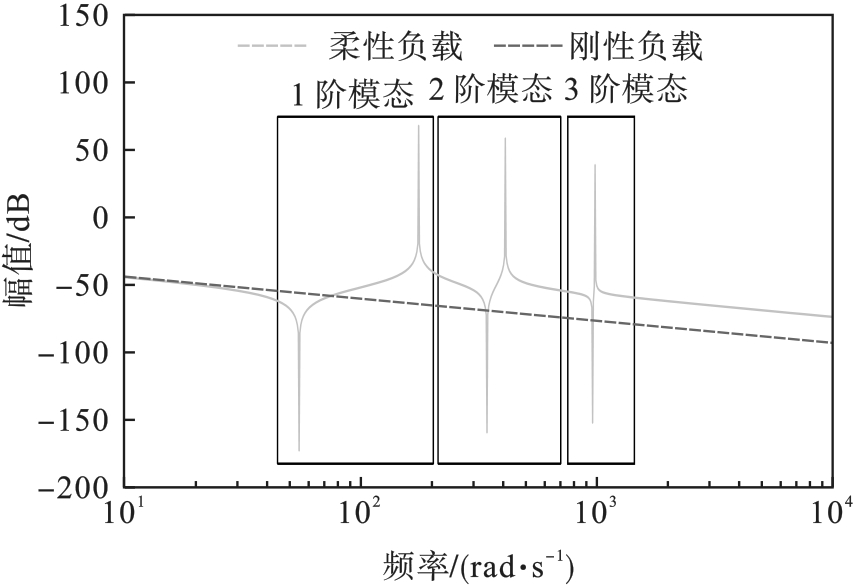
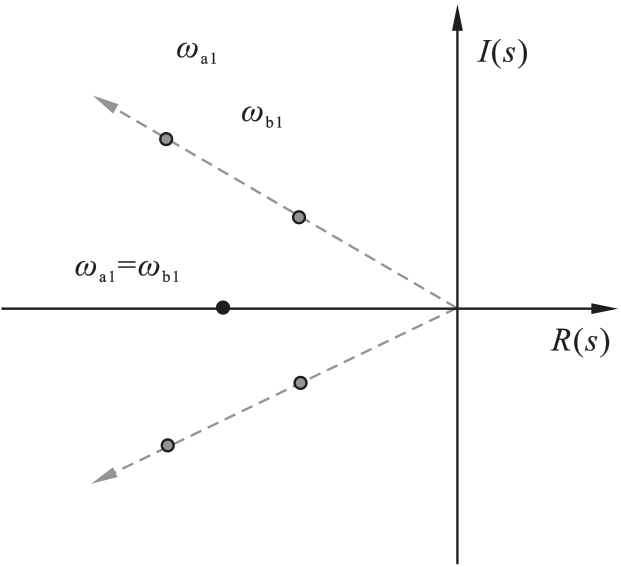
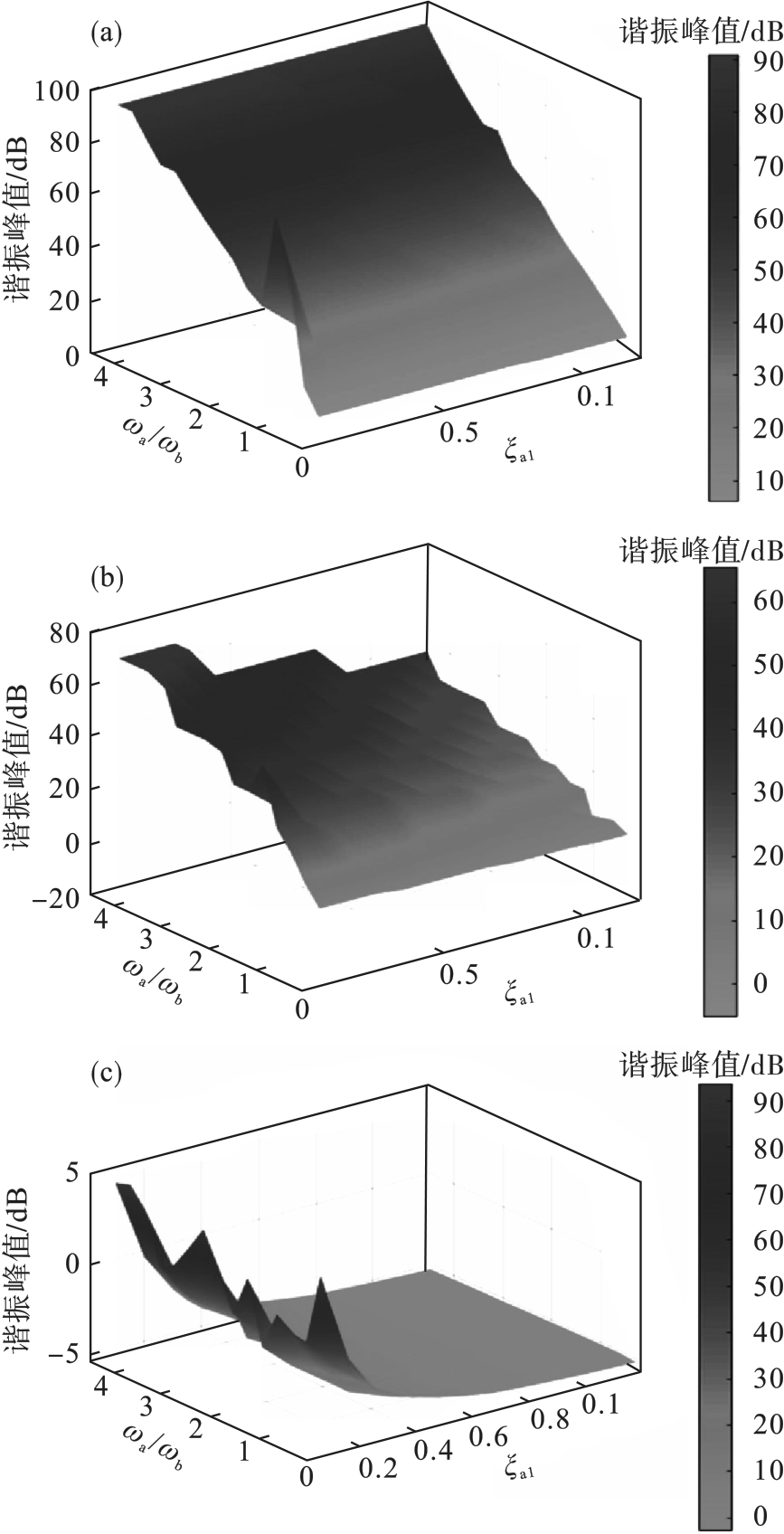
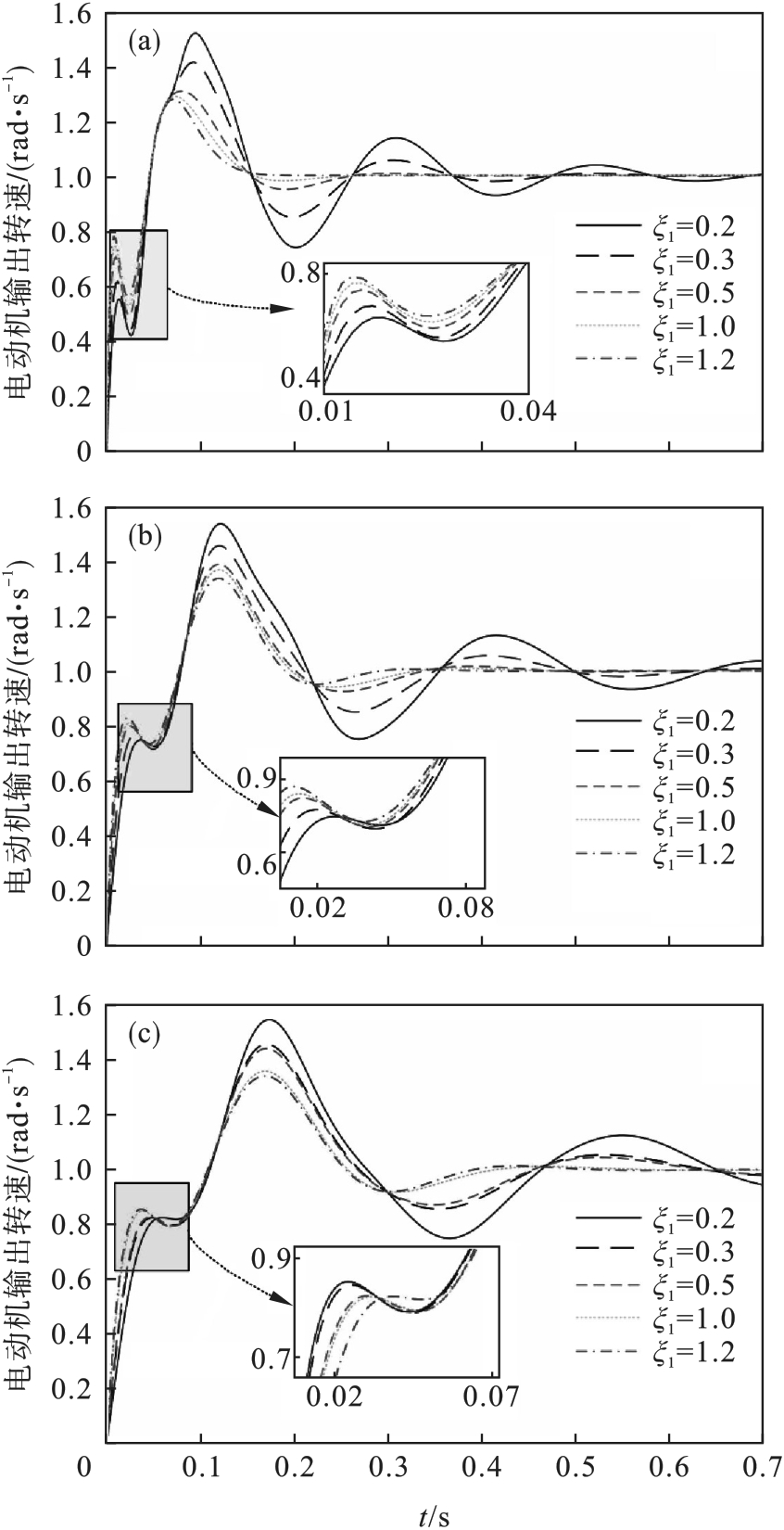
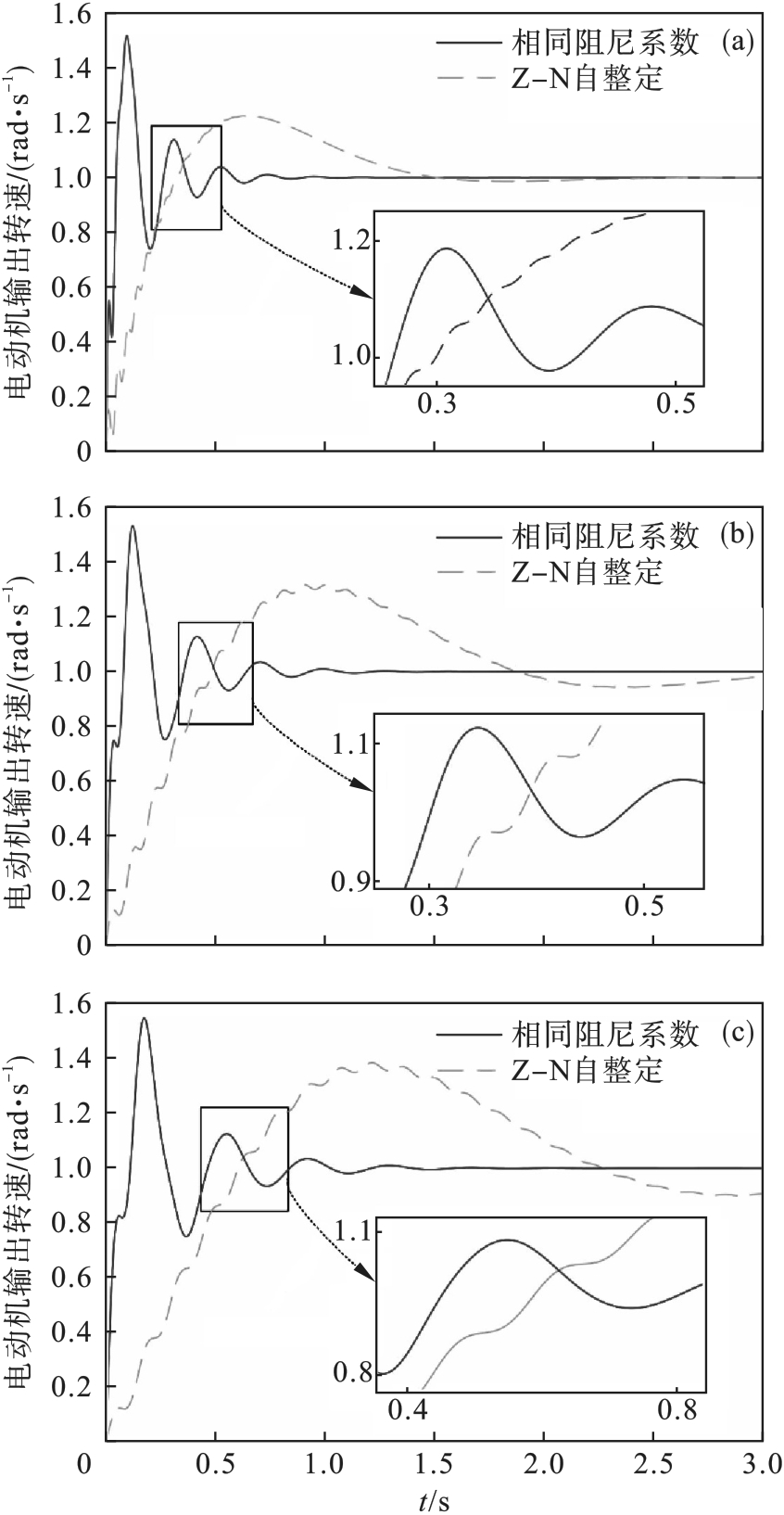
柔性机械臂和柔性负载会随着机械臂位姿的改变,导致转动惯量等具体参数发生改变,进而对伺服驱动系统的输出转速产生影响.采用相同阻尼系数的极点配置方法对驱动系统的比例-积分(proportional-integral,PI)控制器参数进行调节,使PI控制器随机械臂位姿改变自动调节参数,动态稳定电动机输出转速.根据拉格朗日原理和连续体振动理论建立数学模型,通过状态方程获得传递函数,采用相同阻尼系数极点配置方法调节PI控制器参数,应用到转速环控制中.分析阻尼系数与自然频率对系统谐振峰值、谐振频率和带宽的影响.通过数值仿真证明,合理调节阻尼系数可以减小伺服驱动系统转速波动.通过与齐格勒-尼科尔斯法则自整定(Ziegler-Nichols self-tuning,Z-N)方法的对比,表明相同阻尼系数的极点配置方法使系统达到稳定的时间更短.
中图分类号: