东北大学学报(自然科学版) ›› 2024, Vol. 45 ›› Issue (4): 540-547.DOI: 10.12068/j.issn.1005-3026.2024.04.011
• 机械工程 • 上一篇
唐传茵, 夏冀沣, 章明理, 吴龙杰
Chuan-yin TANG, Ji-feng XIA, Ming-li ZHANG, Long-jie WU
摘要:
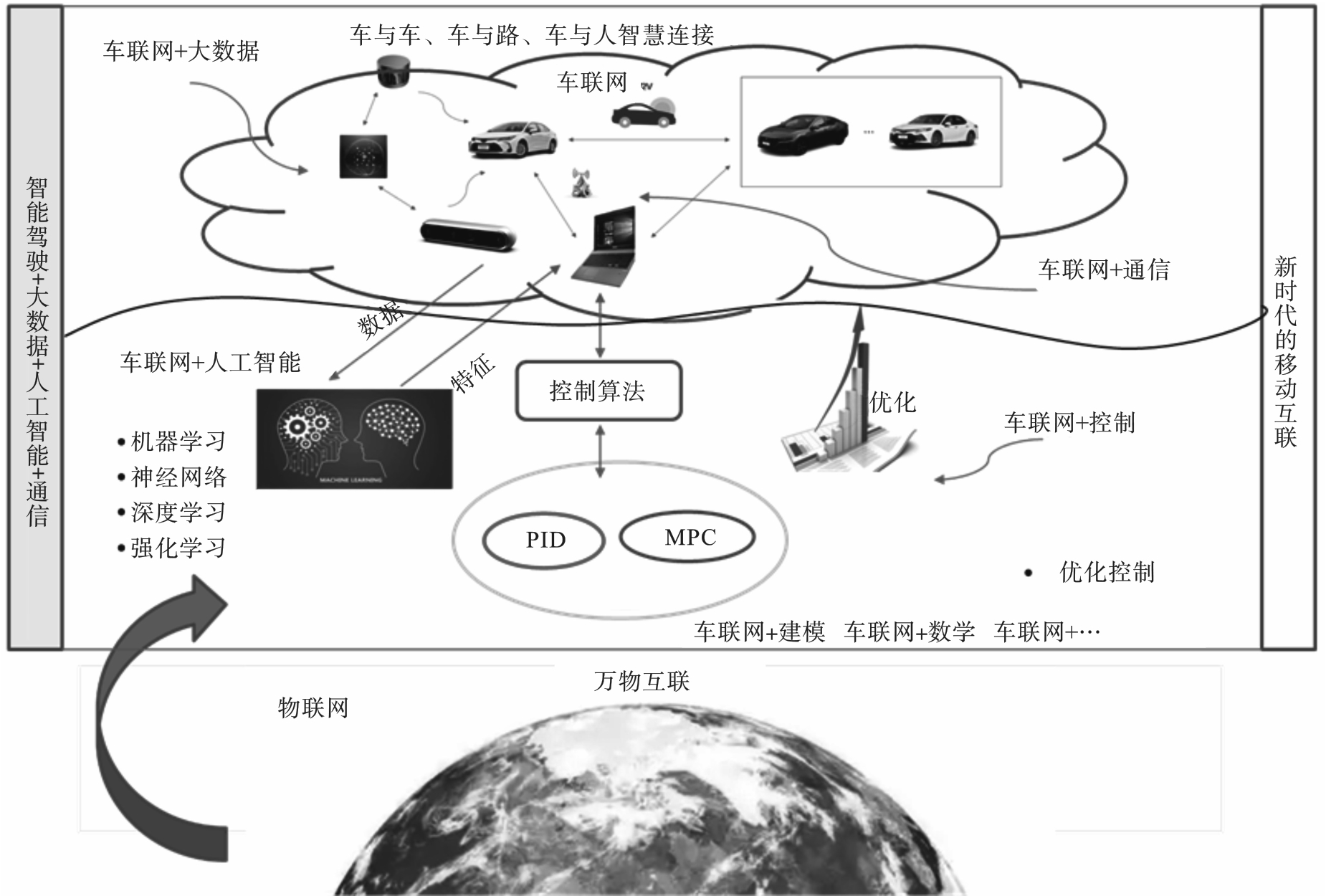
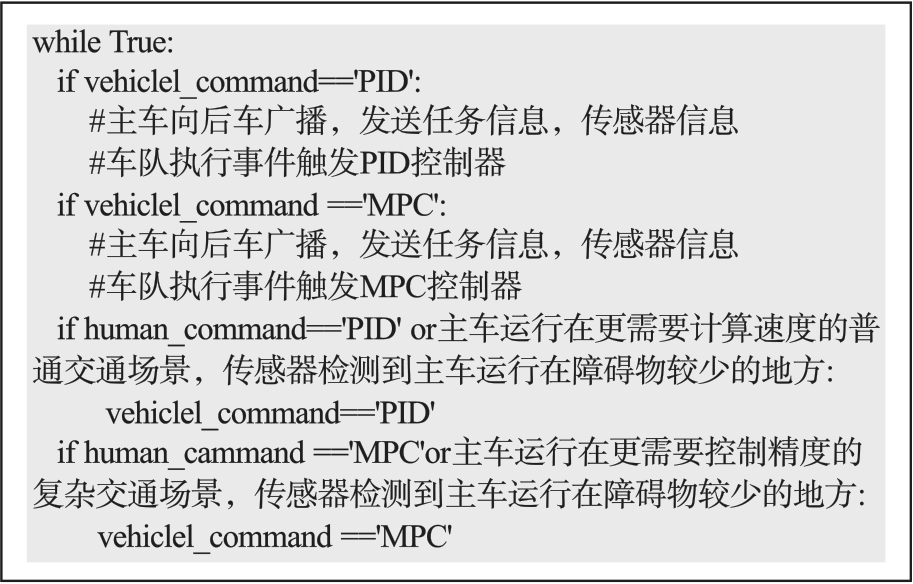
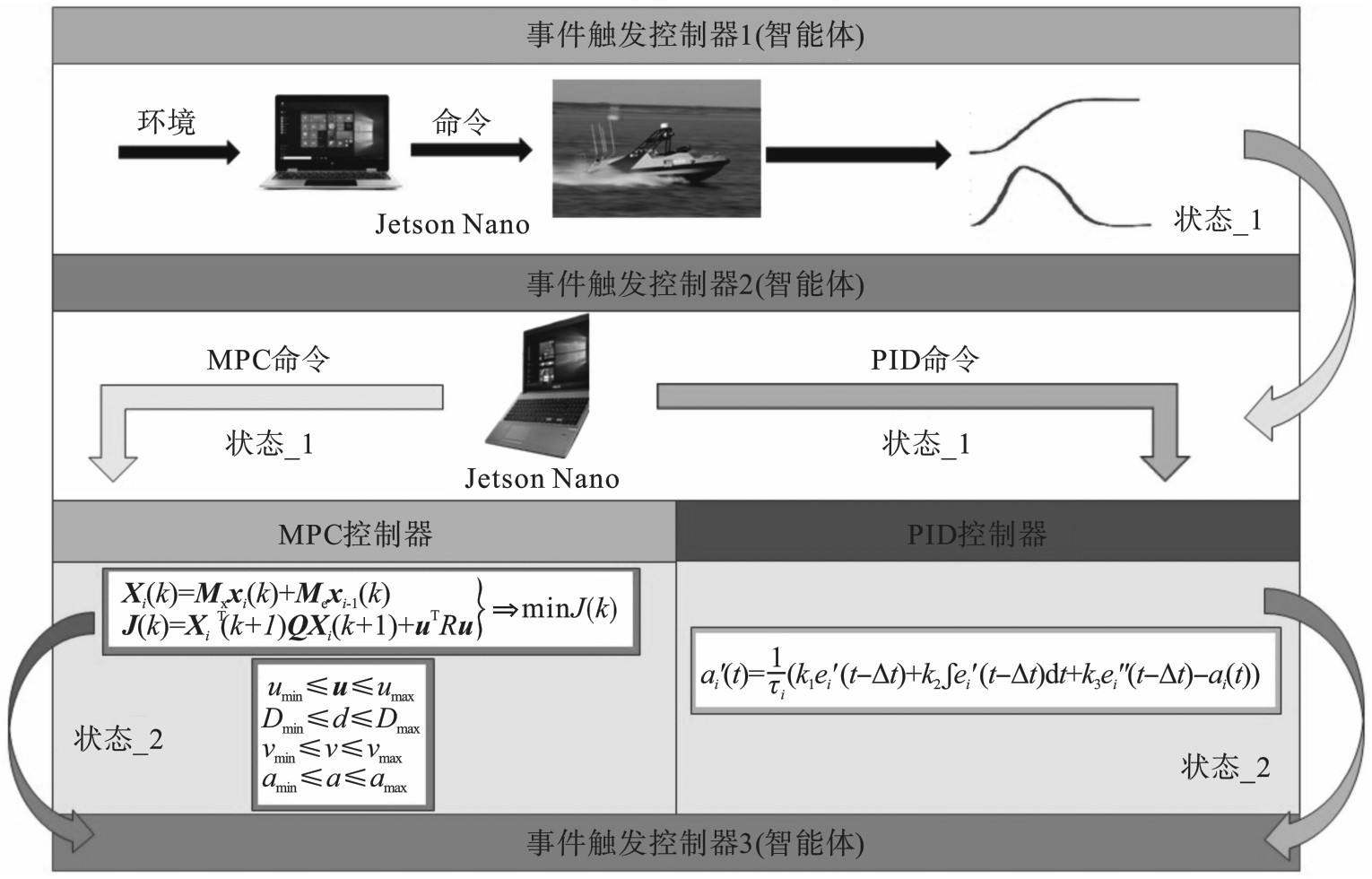
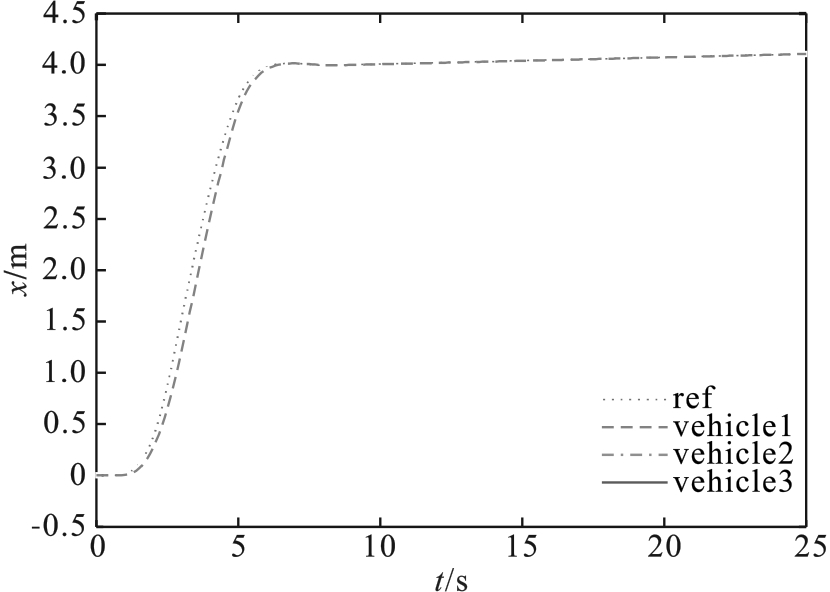
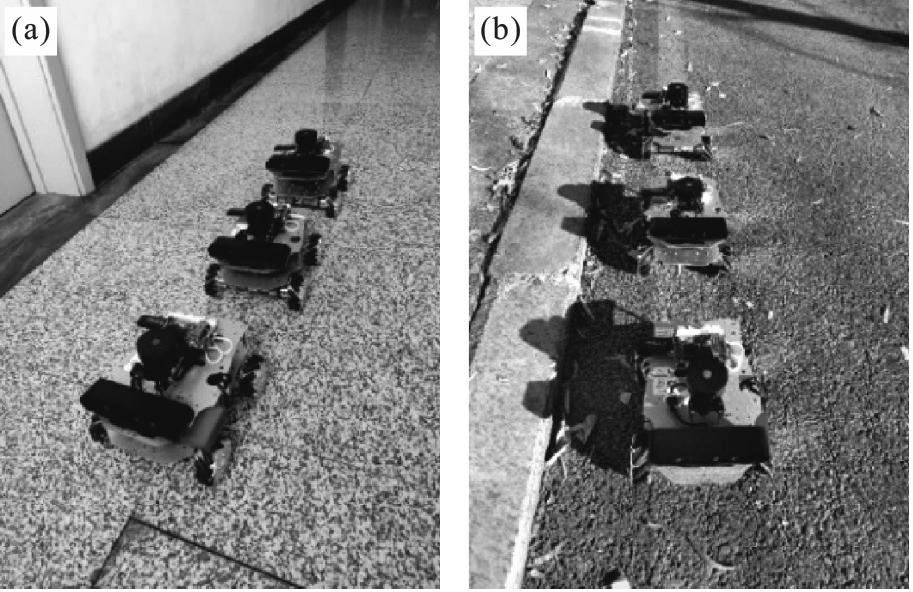
针对目前研究较少考虑车辆混行造成的异质问题与时延问题,本文提出了一种具有时延的异质协作式自动驾驶车队事件触发控制方法.首先,建立了考虑混行的异质车辆时延模型;其次,基于PID(proportional?integral?derivative)控制与模型预测控制(MPC),设计了不同模式下的事件触发控制器;然后,在城市和紧急情况下,对所提出的控制器进行了仿真分析;最后,基于Jetson Nano模型车进行了实车实验.仿真与实验结果表明,所提出的事件触发控制方法能够在不同情况下更好地权衡控制精度与计算速度间的矛盾.在带有通信时延的紧急情况下,仍能够保持较低的误差.
中图分类号: