东北大学学报(自然科学版) ›› 2024, Vol. 45 ›› Issue (7): 984-991.DOI: 10.12068/j.issn.1005-3026.2024.07.010
郭立新1( ), 李泽豪1,2, 赵明扬2
), 李泽豪1,2, 赵明扬2
Li-xin GUO1(), Ze-hao LI1,2, Ming-yang ZHAO2
摘要:
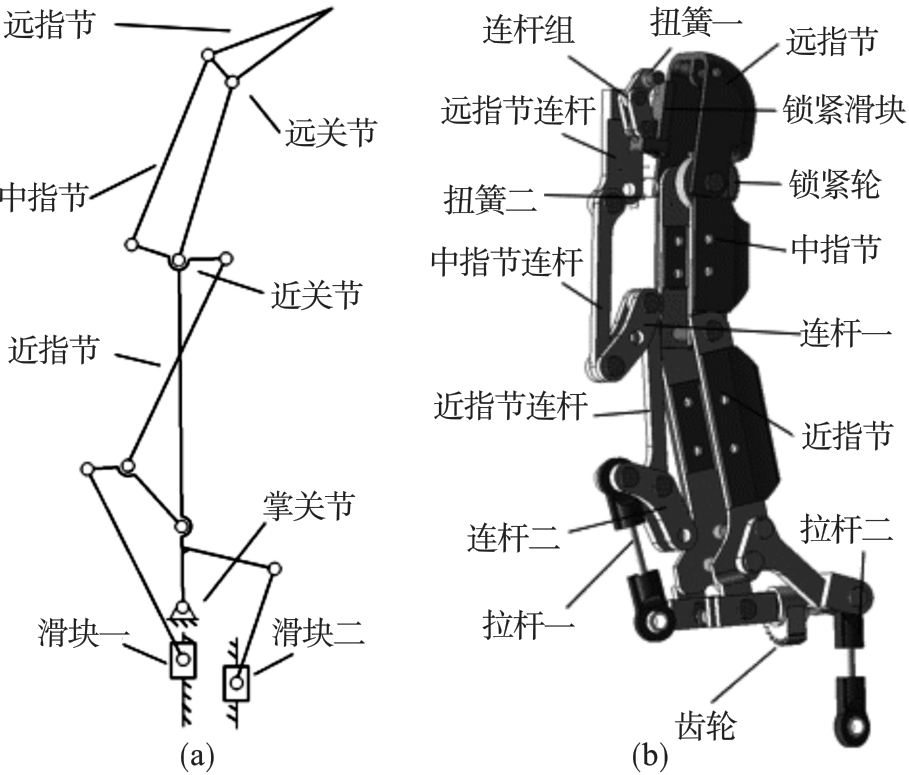
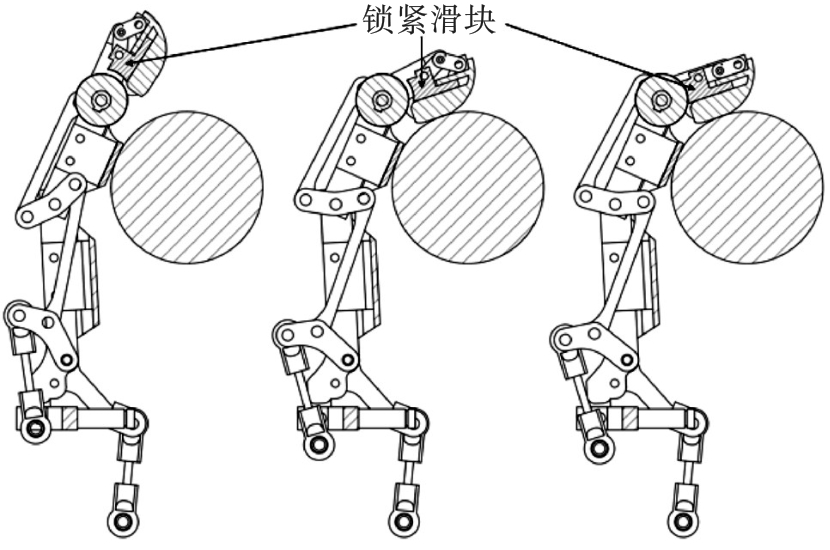
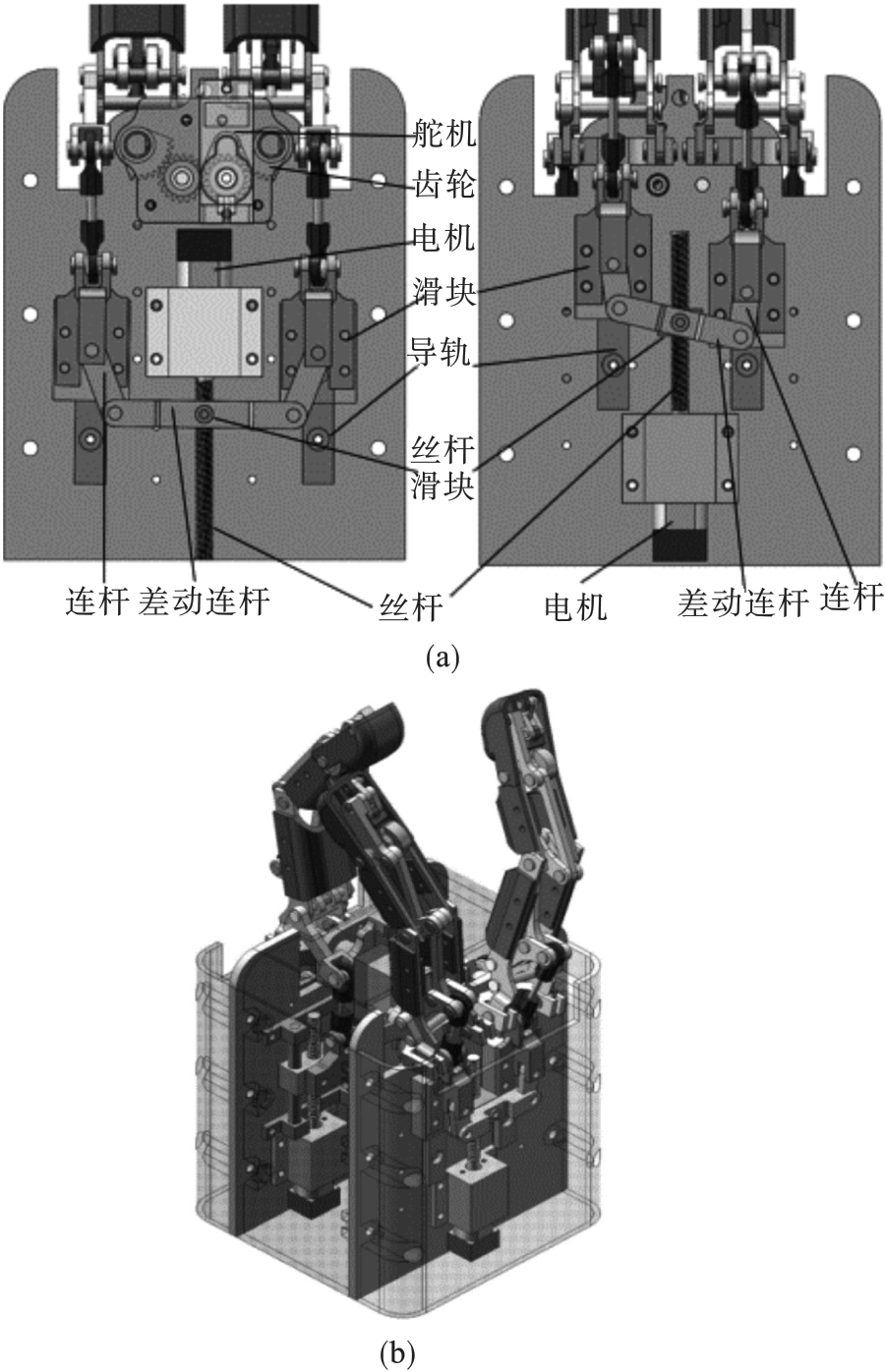
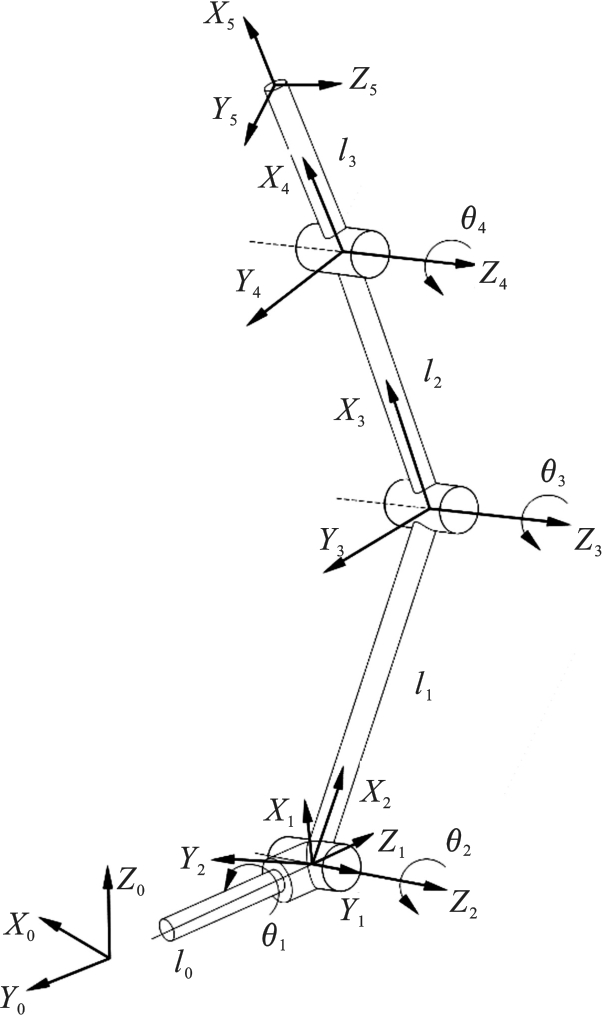
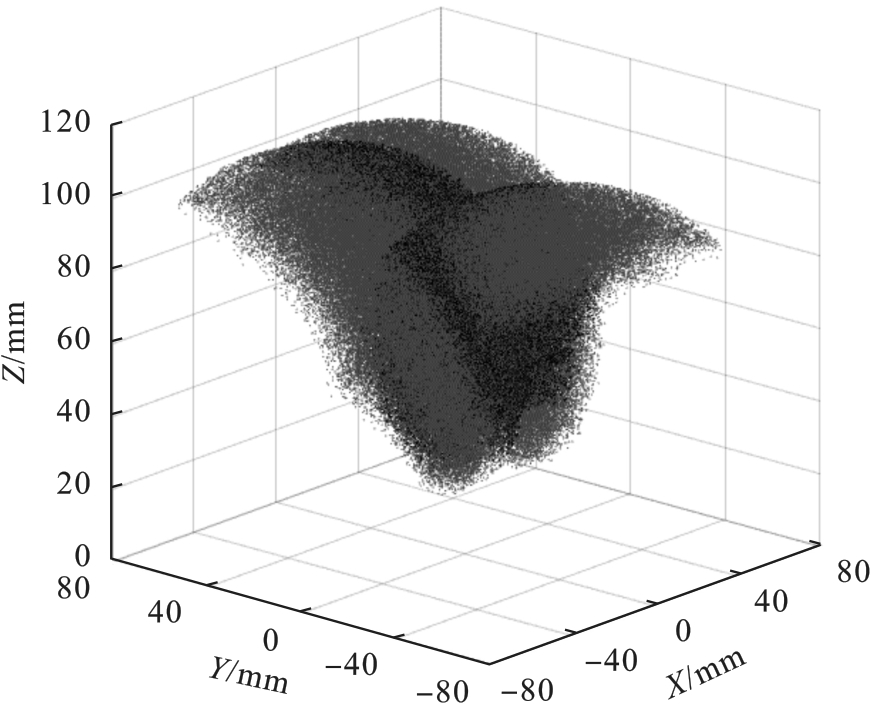
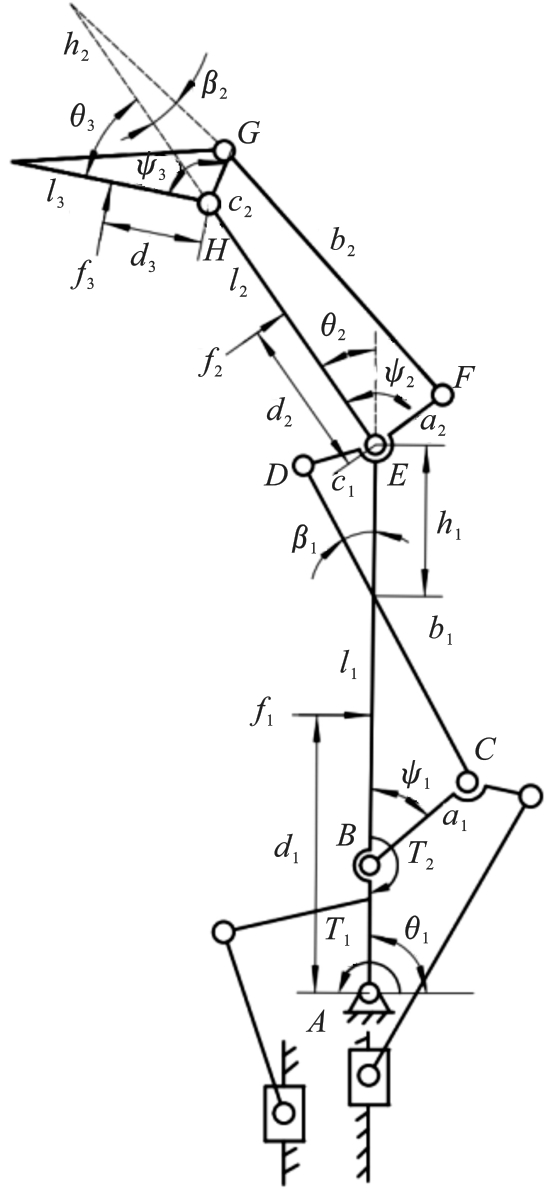
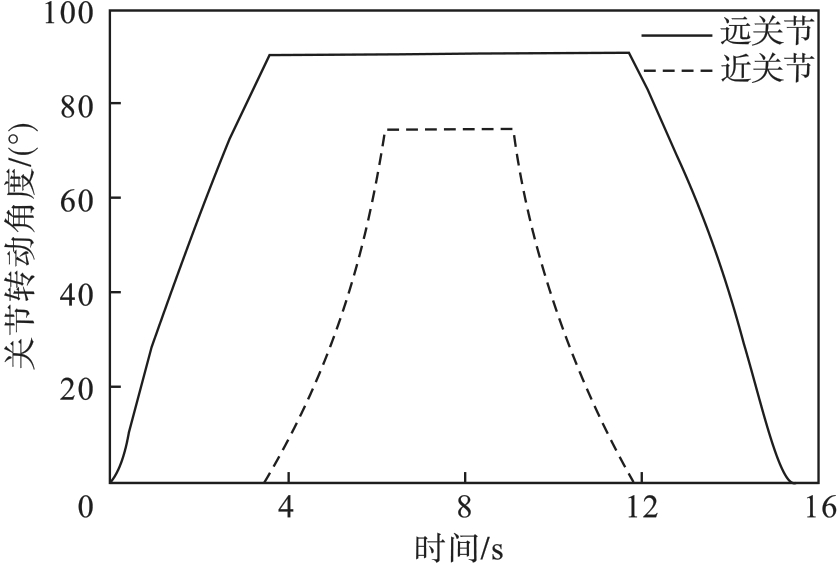
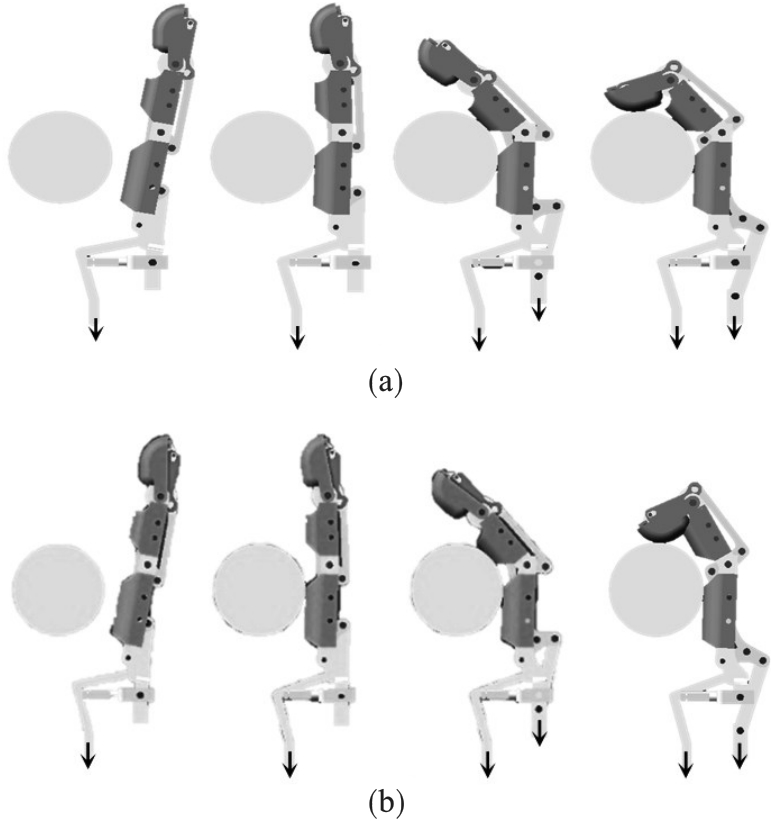
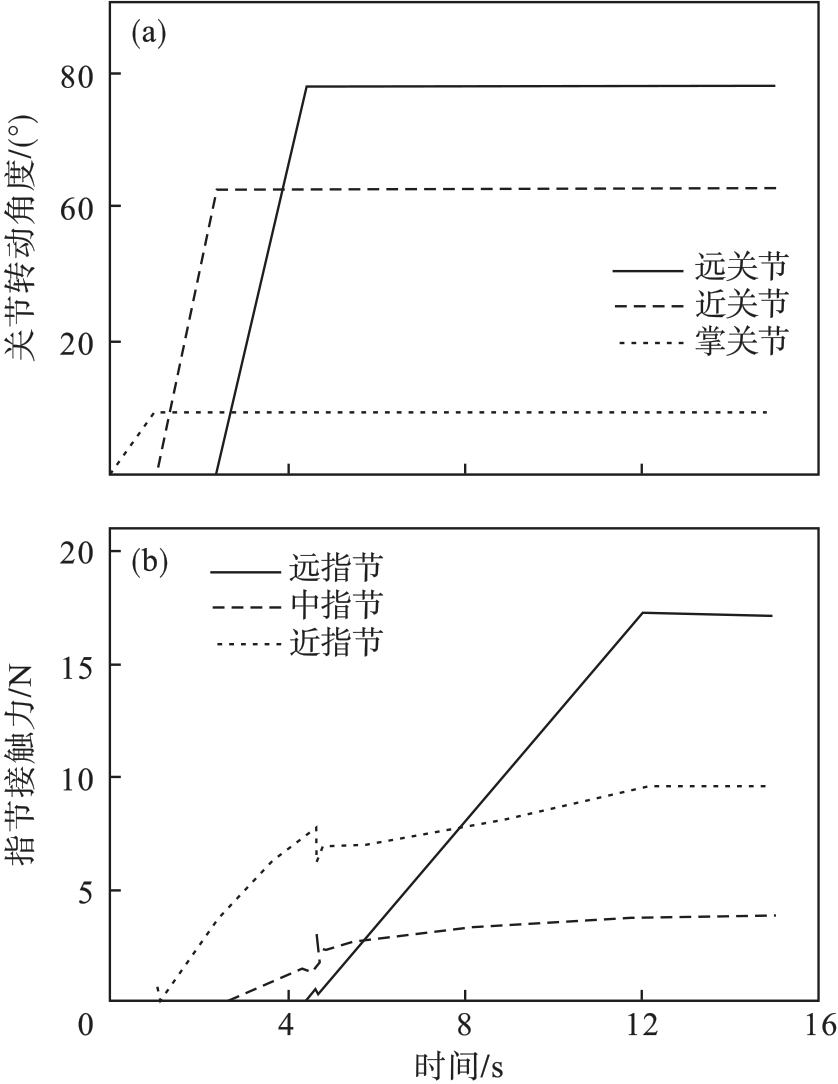
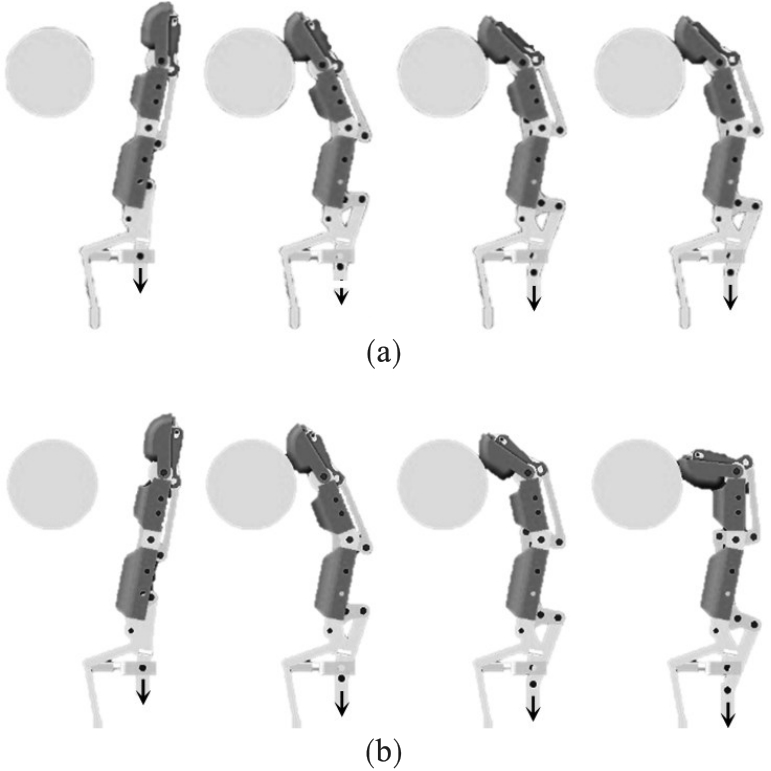
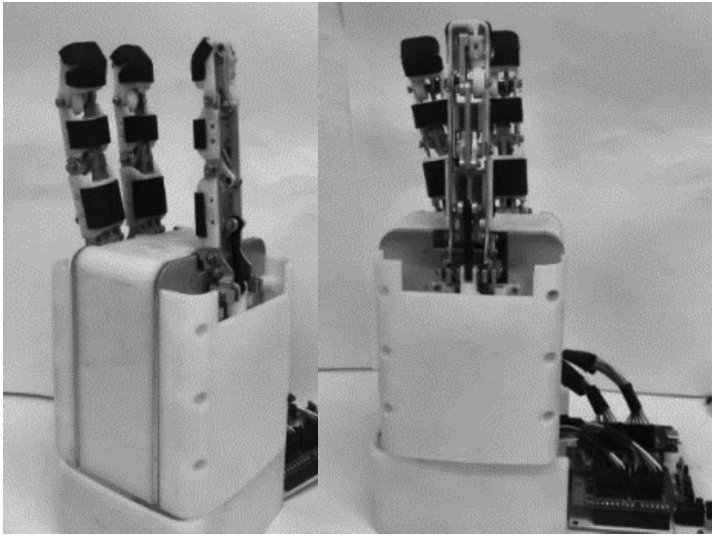
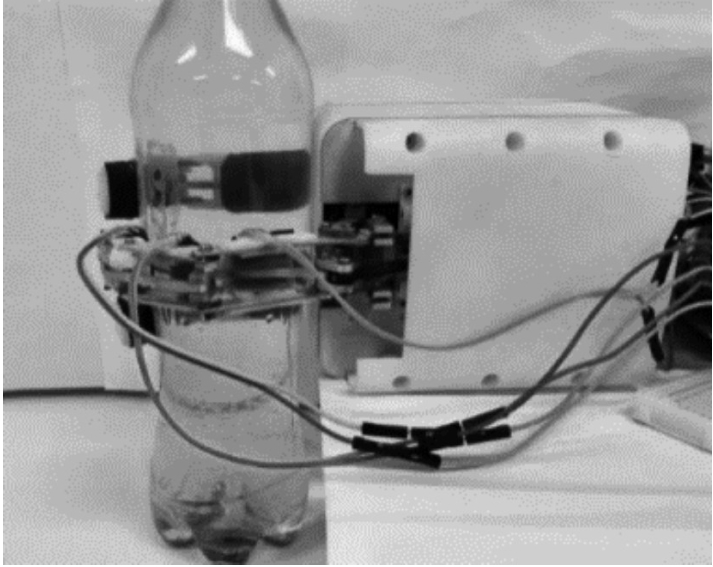
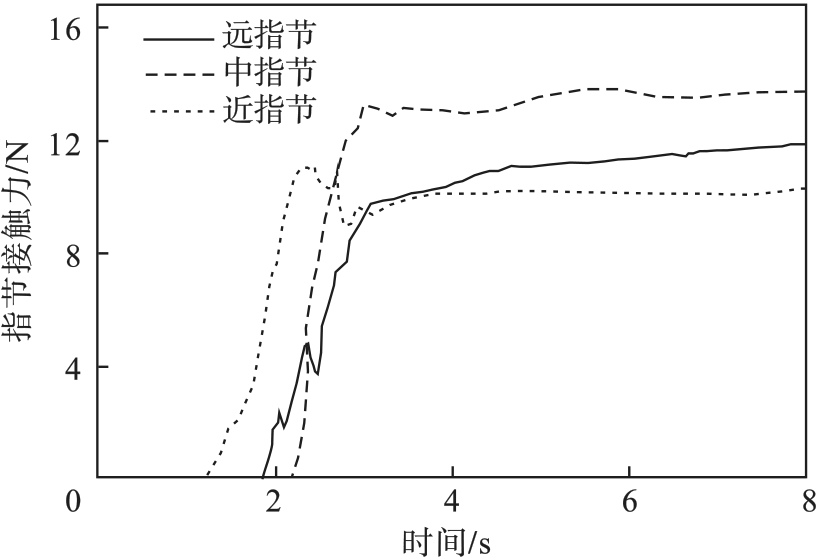
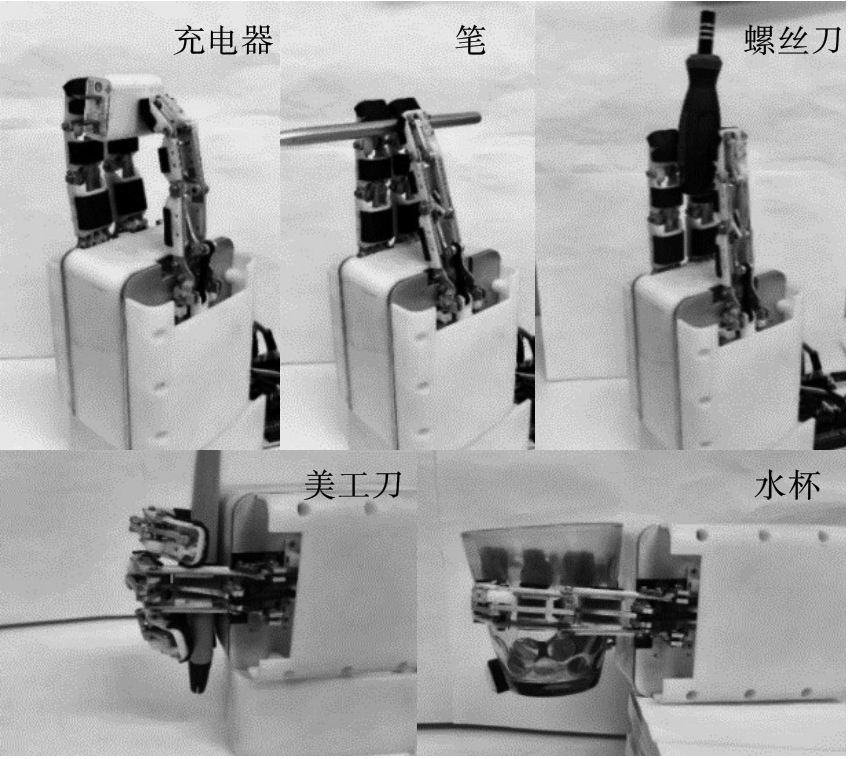
欠驱动机械手结构简单、成本低、易于控制、自适应能力强,但欠驱动机械手是通过机械限位与弹簧约束来完成抓取,抓取稳定性差,无法输出较大的指尖抓取力.本文提出一种新型的指尖可自锁的欠驱动三指机械手,在抓取时远指节与中指节可实现自锁,增加了抓取的稳定性.同时建立了单指的D-H运动学模型,利用MATLAB分析了机械手的工作空间,对手指进行了静力学分析,利用ADAMS软件对机械手进行仿真分析,最后进行抓取测试,结果表明指尖自锁机械手能输出更大抓取力,从而验证了指尖自锁机械手结构的合理性与可行性.
中图分类号: