东北大学学报(自然科学版) ›› 2025, Vol. 46 ›› Issue (5): 29-36.DOI: 10.12068/j.issn.1005-3026.2025.20230297
艾散·西尔艾力1, 车德福1( ), 王夺2, 喻甜3
), 王夺2, 喻甜3
收稿日期:2023-10-27
出版日期:2025-05-15
发布日期:2025-08-07
通讯作者:
车德福
作者简介:艾散·西尔艾力(1997—),男,新疆尉犁人,东北大学硕士研究生基金资助:
Aisan XIERAILI1, De-fu CHE1(), Duo WANG2, Tian YU3
Received:2023-10-27
Online:2025-05-15
Published:2025-08-07
Contact:
De-fu CHE
摘要:
基于机器视觉的环境感知技术是智慧交通领域的关键任务之一.传统深度学习算法通常只能满足单一场景下的个别目标检测任务,难以应对复杂交通环境下的智能感知需求.为提高车辆在复杂环境下的智能感知能力,提出了一种改进的YOLOv8目标检测网络模型,结合注意力机制、优化器和可变形卷积层,实现了在复杂城市交通环境下的多目标检测.采用YOLOv4,YOLOv8及改进的YOLOv8算法对复杂交通环境样本图进行目标检测对比实验.结果表明,与YOLOv4,YOLOv8相比,改进的YOLOv8算法的平均精度分别提高了40.76%和16.92%.该算法的检测准确性与实时性满足实际应用需求,可通过多传感器信息融合,实现在复杂城市交通环境下的智能感知.
中图分类号:
艾散·西尔艾力, 车德福, 王夺, 喻甜. 基于目标检测的复杂城市交通环境感知技术及应用[J]. 东北大学学报(自然科学版), 2025, 46(5): 29-36.
Aisan XIERAILI, De-fu CHE, Duo WANG, Tian YU. Perception Technology and Application of Complex Urban Traffic Environment Based on Target Detection[J]. Journal of Northeastern University(Natural Science), 2025, 46(5): 29-36.
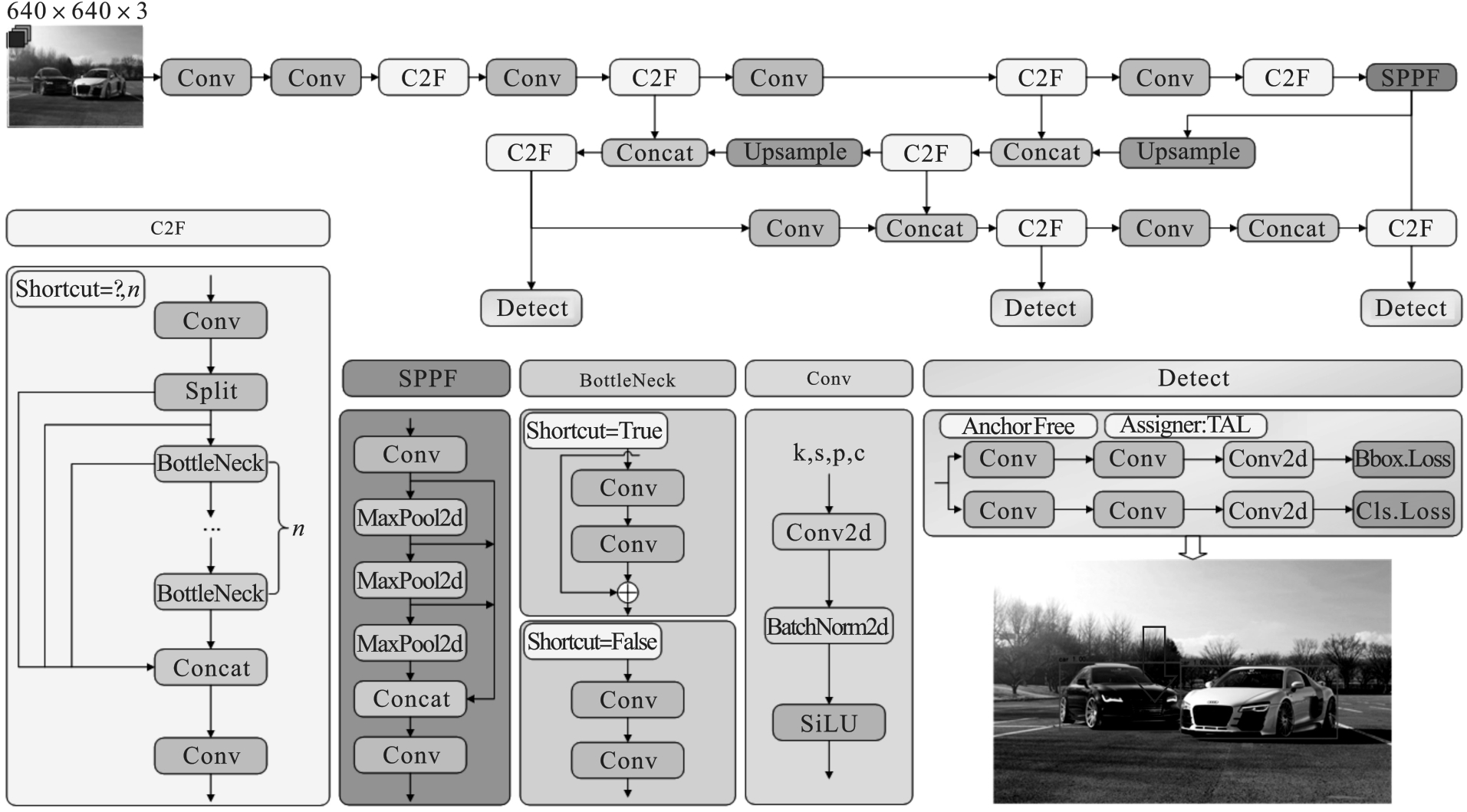
图1 YOLOv8网络结构
Fig.1 YOLOv8 network structure
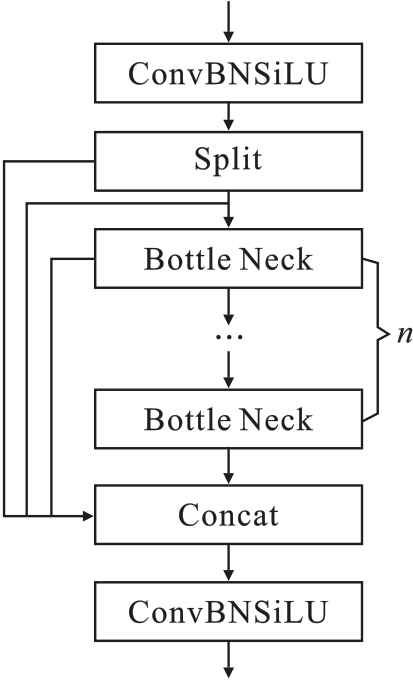
图2 C2F结构
Fig.2 Structure of C2F
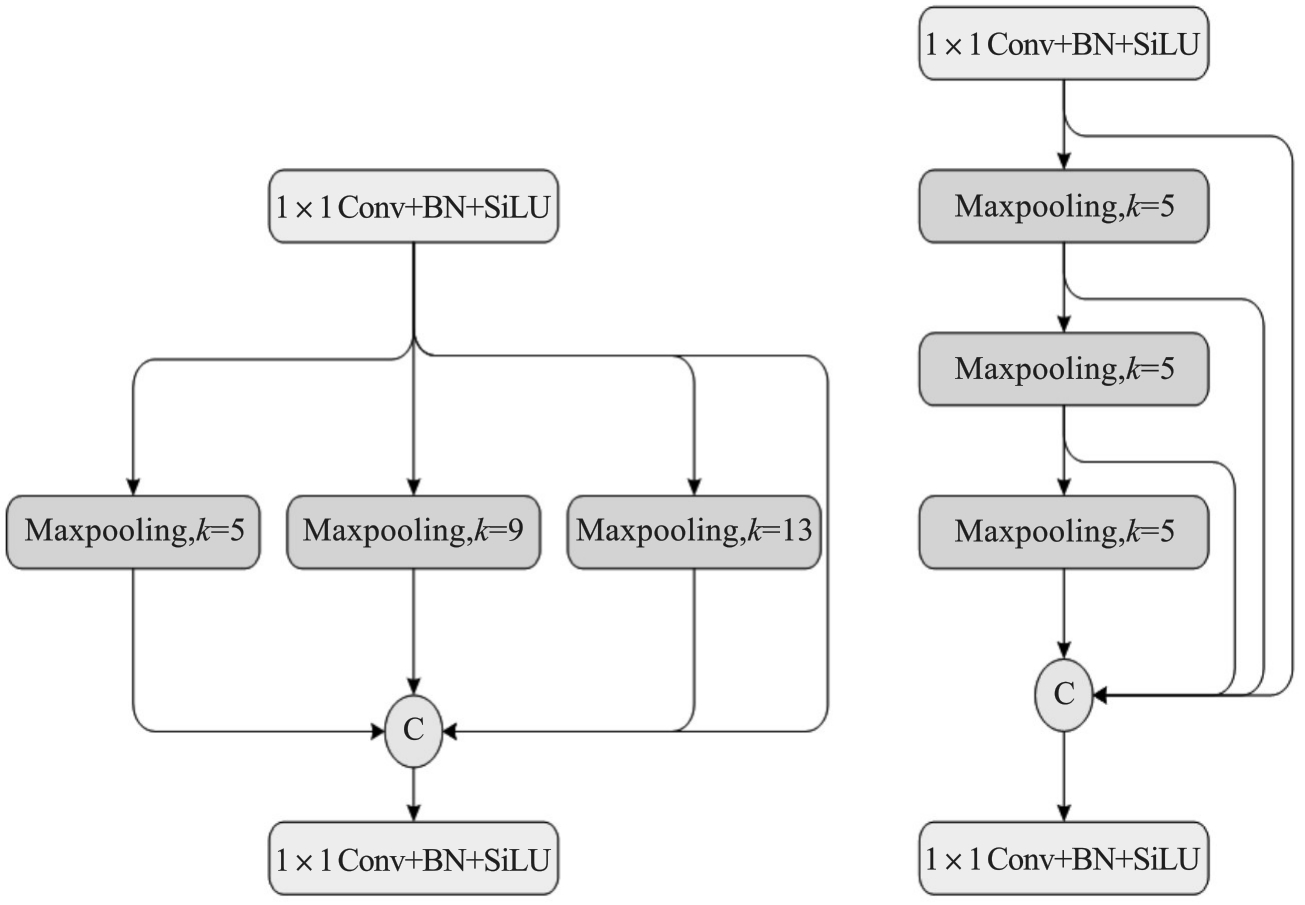
图3 SPP与SPPF结构
Fig.3 Structure of SPP and SPPF
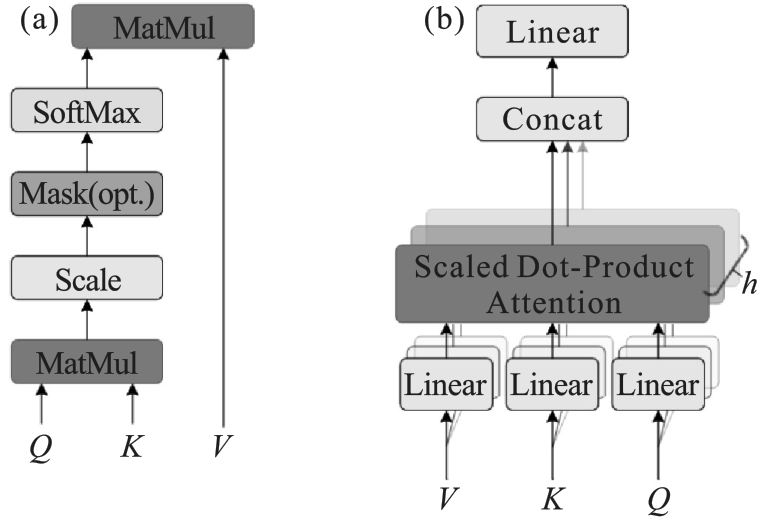
图4 缩放点积注意力与多头注意力机制结构(a)—缩放点积注意力; (b)—多头注意力.
Fig.4 Scaling point product attention and multi-head attention mechanism structure

图5 标准卷积和可变形卷积的采样位置示意图(a)—标准卷积规则采样网格; (b)—可变形卷积采样网格(带偏移量);(c)—可变形卷积采样网格(尺度变换); (d)—可变形卷积(旋转变换).
Fig.5 Schematic diagram of sampling positions of standard convolution and deformable convolution

图6 标准卷积与可变形卷积的卷积过程示例(a) —标准卷积; (b)—可变形卷积.
Fig.6 Examples of convolution process of standard convolution and deformable convolution

图7 CutMix方法示意图
Fig.7 Schematic diagram of CutMix method
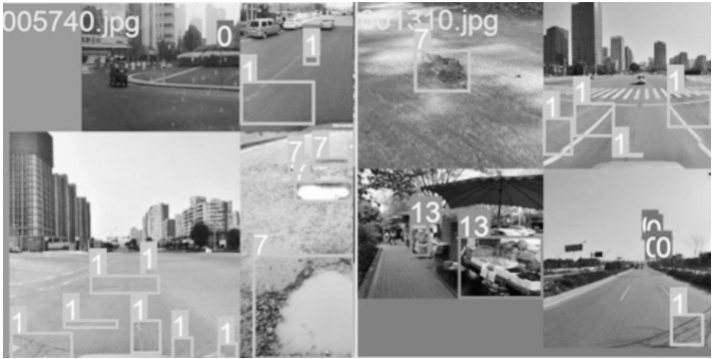
图8 Mosaic方法示意图
Fig.8 Schematic diagram of Mosaic method
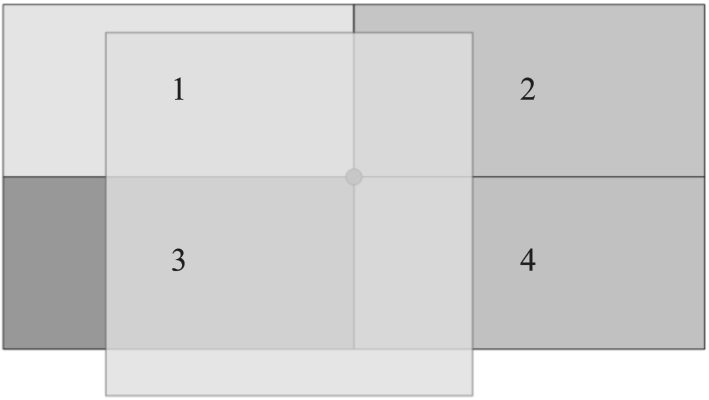
图9 Mosaic图像截取方式
Fig.9 Image interception method of Mosaic
| 训练参数 | 数值 | 训练参数 | 数值 |
|---|---|---|---|
| epoch | 100 | imgsize | 640 |
| batch | 16 | workers | 4 |
| optimizer | Adam | patience | 50 |
| save_period | 10 | close_mosaic | 10 |
表1 训练参数设置
Table 1 Training parameter setting
| 训练参数 | 数值 | 训练参数 | 数值 |
|---|---|---|---|
| epoch | 100 | imgsize | 640 |
| batch | 16 | workers | 4 |
| optimizer | Adam | patience | 50 |
| save_period | 10 | close_mosaic | 10 |
| 测试图像 | 人工标记图像 | 本文模型检测结果 |
|---|---|---|
 |  |  |
 |  |  |
表2 实验结果
Table 2 Experimental results
| 测试图像 | 人工标记图像 | 本文模型检测结果 |
|---|---|---|
| | |
| | |
| 模型 | 主干网络 | 输入尺寸/像素 | mAP/% | FPS | IoU |
|---|---|---|---|---|---|
| YOLOv4 | CSPDarknet53 | 416×416 | 44.19 | 47 | 0.5 |
| YOLOv8 | CSPDarknet+C2F | 640×640 | 53.20 | 87 | 0.5 |
| 改进YOLOv8 | CSPDarknet+C2F | 640×640 | 62.20 | 78 | 0.5 |
表3 不同网络模型的性能对比
Table 3 Performance comparison of different network models
| 模型 | 主干网络 | 输入尺寸/像素 | mAP/% | FPS | IoU |
|---|---|---|---|---|---|
| YOLOv4 | CSPDarknet53 | 416×416 | 44.19 | 47 | 0.5 |
| YOLOv8 | CSPDarknet+C2F | 640×640 | 53.20 | 87 | 0.5 |
| 改进YOLOv8 | CSPDarknet+C2F | 640×640 | 62.20 | 78 | 0.5 |
| 目标类型 | 模型平均精度mAP50 | 改进模型精度提升量 | |||
|---|---|---|---|---|---|
| YOLOv4 | YOLOv8 | 改进YOLOv8 | 相对YOLOv4 | 相对YOLOv8 | |
| 总平均 | 44.19 | 53.20 | 62.20 | 18.01 | 9.00 |
| 交通标志牌 | 55.59 | 68.40 | 68.30 | 12.71 | -0.10 |
| 路面破损 | 57.60 | 73.60 | 81.10 | 23.50 | 7.50 |
| 井盖 | 50.95 | 47.50 | 51.10 | 0.15 | 3.60 |
| 井盖丢失 | 96.62 | 86.50 | 97.40 | 0.78 | 10.90 |
| 垃圾桶 | 53.95 | 71.80 | 75.80 | 21.85 | 4.00 |
| 垃圾桶倾倒 | 56.93 | 95.00 | 99.50 | 42.57 | 4.50 |
| 雨水立箅 | 53.26 | 58.80 | 67.40 | 14.14 | 8.60 |
| 雨水立箅破损 | 00.00 | 33.20 | 99.50 | 99.50 | 66.30 |
| 火焰 | 45.07 | 63.10 | 65.40 | 20.33 | 2.30 |
| 违规摆摊 | 44.19 | 47.00 | 54.70 | 10.51 | 7.70 |
表4 实验结果对比 (%)
Table 4 Comparison of experimental results
| 目标类型 | 模型平均精度mAP50 | 改进模型精度提升量 | |||
|---|---|---|---|---|---|
| YOLOv4 | YOLOv8 | 改进YOLOv8 | 相对YOLOv4 | 相对YOLOv8 | |
| 总平均 | 44.19 | 53.20 | 62.20 | 18.01 | 9.00 |
| 交通标志牌 | 55.59 | 68.40 | 68.30 | 12.71 | -0.10 |
| 路面破损 | 57.60 | 73.60 | 81.10 | 23.50 | 7.50 |
| 井盖 | 50.95 | 47.50 | 51.10 | 0.15 | 3.60 |
| 井盖丢失 | 96.62 | 86.50 | 97.40 | 0.78 | 10.90 |
| 垃圾桶 | 53.95 | 71.80 | 75.80 | 21.85 | 4.00 |
| 垃圾桶倾倒 | 56.93 | 95.00 | 99.50 | 42.57 | 4.50 |
| 雨水立箅 | 53.26 | 58.80 | 67.40 | 14.14 | 8.60 |
| 雨水立箅破损 | 00.00 | 33.20 | 99.50 | 99.50 | 66.30 |
| 火焰 | 45.07 | 63.10 | 65.40 | 20.33 | 2.30 |
| 违规摆摊 | 44.19 | 47.00 | 54.70 | 10.51 | 7.70 |
| [1] | 高德芝,段建民,郑榜贵,等.智能车辆环境感知传感器的应用现状[J]. 现代电子技术, 2008(19): 151-156. |
| Gao De-zhi, Duan Jian-min, Zheng Bang-gui, et al. Application status of intelligent vehicle environmental sensing sensor [J]. Modern Electronic Technology, 2008(19): 151-156. | |
| [2] | Wang K, Gou C, Zheng N, et al. Parallel vision for perception and understanding of complex scenes: methods, framework, and perspectives[J]. Artificial Intelligence Review, 2017, 48(3): 299-329. |
| [3] | Aufrère R, Gowdy J, Mertz C, et al. Perception for collision avoidance and autonomous driving [J]. Mechatronics, 2003, 13(10): 1149-1161. |
| [4] | Montemerlo M, Becker J, Bhat S, et al. Junior: the Stanford entry in the urban challenge [J]. Journal of Field Robotics, 2008, 25(9): 569-597. |
| [5] | Leonard J, How J, Teller S, et al. A perception-driven autonomous urban vehicle[J]. Journal of Field Robotics, 2008, 25(10): 727-774. |
| [6] | 谢志萍,雷莉萍.智能网联汽车环境感知技术的发展和研究现状[J]. 成都工业学院学报, 2016, 19(4): 87-92. |
| Xie Zhi-ping, Lei Li-ping. Development and research status of intelligent networked automotive environment awareness technology[J]. Journal of Chengdu Technological University, 2016, 19(4): 87-92. | |
| [7] | Redmon J, Divvala S, Girshick R, et al. You only look once: unified, real-time object detection[C]// Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR). Las Vegas, 2016:779-788. |
| [8] | Asmaa B, Khalid Z. Optimizing CNN-BiGRU performance: mish activation and comparative analysis[J]. International Journal of Computer Networks & Communications, 2024, 16(3): 69-87. |
| [9] | Wang Y F, Hua C C, Ding W L, et al. Real-time detection of flame and smoke using an improved YOLOv4 network[J]. Signal, Image and Video Processing, 2022, 16(4): 1-8. |
| [10] | 张凯祥,朱明.基于YOLOv5的多任务自动驾驶环境感知算法[J]. 计算机系统应用, 2022, 31(9): 226-232. |
| Zhang Kai-xiang, Zhu Ming. Multi-task automatic driving environment perception algorithm based on YOLOv5 [J]. Computer Systems & Applications, 2022, 31(9): 226-232. | |
| [11] | Fei X, Li T H, Xiao Y G, et al. Research on YOLOv3 model compression strategy for UAV deployment[J]. Cognitive Robotics, 2024, 4: 8-18. |
| [12] | Guo K Y, Cheng B H, Min Y, et al. A pavement distresses identification method optimized for YOLOv5s[J]. Scientific Reports, 2022, 12(1): 1-15. |
| [13] | 郭振宇,高国飞.基于YOLO v4的复杂路口下人车混行检测算法研究[J]. 信息技术与信息化, 2021(2): 236-240. |
| Guo Zhen-yu, Gao Guo-fei. Research on detection algorithm of mixed traffic between people and vehicles at complex intersections based on YOLO v4 [J]. Information Technology and Informatization, 2021(2): 236-240. | |
| [14] | Łysakowski M, Żywanowski K, Banaszczyk A, et al. Real-time onboard object detection for augmented reality: enhancing head-mounted display with YOLOv8[C]//IEEE International Conference on Edge Computing and Communications. Chicago, 2023:364-371. |
| [15] | Vaswani A, Shazeer N, Parmar N, et al. Attention is all you need[J]. Advances in Neural Information Processing Systems, 2017, 30: 6000-6010. |
| [16] | 李鸿,邹俊颖,谭茜成,等.面向医学图像分割的多注意力融合网络[J]. 计算机应用, 2022, 42(12): 3891-3899. |
| Li Hong, Zou Jun-ying, Tan Qian-cheng, et al. Multi-attention fusion network for medical image segmentation [J]. Journal of Computer Applications, 2022, 42(12): 3891-3899. | |
| [17] | Wang Z Y, Zhu H, Liu F. SMSTracker: a self-calibration multi-head self-attention transformer for visual object tracking[J]. Computers, Materials & Continua, 2024, 80(1): 605-623. |
| [18] | Vasanthi P, Mohan L. A reliable anchor regenerative-based transformer model for x-small and dense objects recognition[J]. Neural Networks, 2023, 165: 809-829. |
| [19] | Battiti R. First- and second-order methods for learning: between steepest descent and Newton's method[J]. Neural Computation, 2014, 4(2): 141-166. |
| [20] | Sutskever I, Martens J, Dahl G, et al. On the importance of initialization and momentum in deep learning[C]// International Conference on Machine Learning (ICML). Atlanta, 2013: 1139-1147. |
| [21] | Qian N. On the momentum term in gradient descent learning algorithms[J]. Neural Networks, 1999, 12(1): 145-151. |
| [22] | Duchi J, Hazan E, Singer Y. Adaptive subgradient methods for online learning and stochastic optimization[J]. Journal of Machine Learning Research, 2011, 12: 2121-2159. |
| [23] | Mohamed R, Amany M S. A modified Adam algorithm for deep neural network optimization[J]. Neural Computing and Applications, 2023, 35(23): 17095-17112. |
| [24] | Sarker I H. Deep learning: a comprehensive overview on techniques, taxonomy, applications and research directions[J]. SN Computer Science, 2021, 2(6): 420-420. |
| [25] | Dai J F, Qi H Z, Xiong Y W, et al. Deformable convolutional networks[C]// Proceedings of the IEEE International Conference on Computer Vision (ICCV). Venice, 2017: 764-773. |
| [26] | 欧阳继红,王梓明,刘思光.改进多尺度特征的YOLO_v4目标检测方法[J]. 吉林大学学报(理学版), 2022, 60(6): 1349-1355. |
| Ouyang Ji-hong, Wang Zi-ming, Liu Si-guang. Improved multi-scale feature method for YOLO_v4 target detection[J]. Journal of Jilin University (Science Edition), 2022, 60(6): 1349-1355. | |
| [27] | 魏东飞,熊峰,孔维畅.改进YOLOv4的轻量化目标检测方法[J]. 计量与测试技术, 2022, 49(11): 18-22. |
| Wei Dong-fei, Xiong Feng, Kong Wei-chang. Improved lightweight target detection method of YOLOv4 [J]. Metrology & Measurement Technique, 2022, 49(11): 18-22. |
| [1] | 郝博, 徐新岩, 赵玉欣, 闫俊伟. 基于改进YOLOv8的铆接孔表面缺陷检测[J]. 东北大学学报(自然科学版), 2024, 45(11): 1595-1603. |
| [2] | 成怡, 王阳. 基于SPWVD-STFT的海面弱目标检测方法[J]. 东北大学学报(自然科学版), 2024, 45(10): 1401-1408. |
| [3] | 包妮沙, 韩子松, 于嘉欣, 韦丽红. 基于改进Faster-RCNN的露天煤矿开采区遥感识别方法[J]. 东北大学学报(自然科学版), 2023, 44(12): 1759-1768. |
| [4] | 李娟莉, 魏代良, 李博, 文小. 基于深度学习轻量化的改进SSD煤矸快速分选模型[J]. 东北大学学报(自然科学版), 2023, 44(10): 1474-1480. |
| [5] | 顾德英, 罗聿伦, 李文超. 基于改进YOLOv5算法的复杂场景交通目标检测[J]. 东北大学学报(自然科学版), 2022, 43(8): 1073-1079. |
| [6] | 于哲舟, 刘岩, 刘元宁. 基于YOLOV3改进的虹膜定位算法[J]. 东北大学学报(自然科学版), 2022, 43(4): 496-501. |
| [7] | 杨爱萍, 宋尚阳, 程思萌. 轻量化自适应特征选择目标检测网络[J]. 东北大学学报(自然科学版), 2021, 42(9): 1238-1245. |
| [8] | 宋欣, 李奇, 解婉君, 李宁. YOLOv3-ADS:一种基于YOLOv3的深度学习目标检测压缩模型[J]. 东北大学学报(自然科学版), 2021, 42(5): 609-615. |
| [9] | 魏颖, 徐楚翘, 刁兆富, 李伯群. 基于生成对抗网络的多目标行人跟踪算法[J]. 东北大学学报(自然科学版), 2020, 41(12): 1673-1680. |
| [10] | 王生生, 王萌, 王光耀. 基于深度神经网络剪枝的两阶段遥感图像目标检测[J]. 东北大学学报:自然科学版, 2019, 40(2): 174-179. |
| [11] | 朴春赫, 潘怡霖, 赵海, 朱宏博. 基于改进ViBe的多行人检测方法[J]. 东北大学学报:自然科学版, 2016, 37(4): 481-485. |
| [12] | 徐久强, 江萍萍, 朱宏博, 左伟. 面向运动目标检测的ViBe算法改进[J]. 东北大学学报:自然科学版, 2015, 36(9): 1227-1231. |
| [13] | 佟国峰,蒋昭炎,谷久宏,庞晓磊. 基于随机蕨丛的长期目标跟踪算法[J]. 东北大学学报:自然科学版, 2013, 34(1): 4-8. |
| [14] | 于晓升;吴成东;陈东岳;田子恒;. 基于多特征融合的遥感图像河流目标检测算法[J]. 东北大学学报(自然科学版), 2012, 33(11): 1547-1550. |
| [15] | 闫爱云;李海朋;李晶皎;王骄;. 视频运动目标提取的实现[J]. 东北大学学报(自然科学版), 2011, 32(11): 1558-1561. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||