Research and Optimization of Multi-axis Linkage Interpolation Algorithm for 3D Printer
Fei WU, Meng-hui WANG, Yi-neng LI
School of Mechanical and Electronic Engineering,Wuhan University of Technology,Wuhan 430070,China. Corresponding author: WU Fei,E-mail: wufei@whut. edu. cn
Fei WU, Meng-hui WANG, Yi-neng LI. Research and Optimization of Multi-axis Linkage Interpolation Algorithm for 3D Printer[J]. Journal of Northeastern University(Natural Science), 2024, 45(1): 85-92.
Yu Dao‐yang.G code preprocessing optimization algorithm for 3D printers[J].China Mechanical Engineering,2019,30(1):85-89,112.
3
Liu J, Tang J L, Dai C Y.Design of DLP 3D printer control system based on arduino[C]//2020 3rd World Conference on Mechanical Engineering and Intelligent Manufacturing (WCMEIM).Shanghai,2020:497-500.
4
Lai C K, Lin B W, Lai H Y,et al.FPGA‐based hybrid stepper motor drive system design by variable structure control[J].Actuators,2021,10(6):113.
5
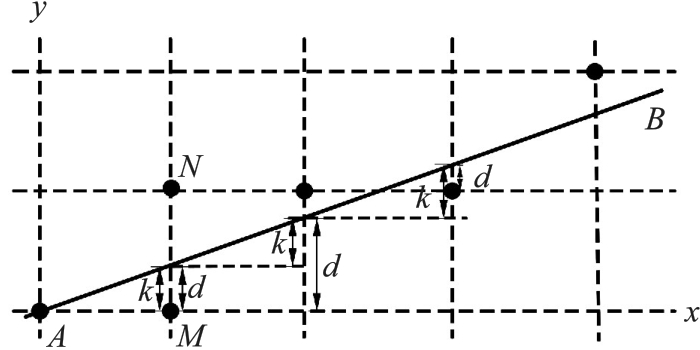
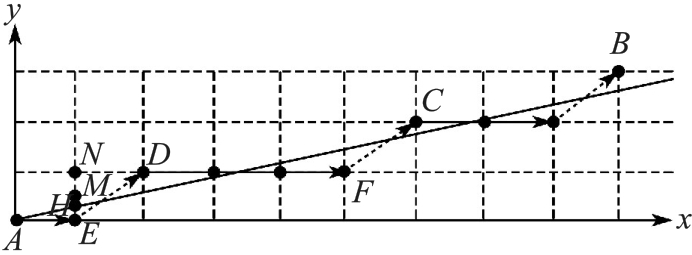
Dai M, Chen Y, Zheng C Q,et al.Design of multi‐step stepper motor coordinated control system based on Bresenham algorithm[C]//2017 24th International Conference on Mechatronics and Machine Vision in Practice (M2VIP).Auckland,2017:1-5.
Wang Bao‐ren, Li Jin‐song, Guo‐na Lyu,et al.A fast linear pulse incremental interpolation algorithm based on Bresenham algorithm[J].Machine Tool & Hydraulics,2018,46(20):155-158.
7
Yu K, Zhang Z S, Zhou Z T,et al.A modified Bresenham algorithm for control system of FDM three‐dimensional printer[M]//Billingsley J,Brett P.Mechatronics and Machine Vision in Practice 4.Cham:Springer,2021:125-139.
8
Foley J D.Introduction to computer graphics[M].Reading,Mass.:Addison‐Wesley,1994.
9
Yu K, Zhang Z S, Zhou Z T,et al.Application of the five‐phase S‐curve velocity model on FDM three‐dimensional printer[C]//2020 IEEE 5th Information Technology and Mechatronics Engineering Conference (ITOEC).Chongqing,2020:1365-1371.