东北大学学报(自然科学版) ›› 2024, Vol. 45 ›› Issue (9): 1258-1267.DOI: 10.12068/j.issn.1005-3026.2024.09.006
• 机械工程 • 上一篇
李小彭1( ), 付嘉兴1, 刘海龙1, 尹猛2
), 付嘉兴1, 刘海龙1, 尹猛2
收稿日期:2023-05-05
出版日期:2024-09-15
发布日期:2024-12-16
通讯作者:
李小彭
作者简介:李小彭(1976-),男,江西宁都人,东北大学教授,博士生导师.
基金资助:
Xiao-peng LI1(), Jia-xing FU1, Hai-long LIU1, Meng YIN2
Received:2023-05-05
Online:2024-09-15
Published:2024-12-16
Contact:
Xiao-peng LI
About author:LI Xiao-peng,E-mail:xpli@me.neu.edu.摘要:
柔性结构导致柔性空间机械臂的动态参数随着时间产生变化,从而降低了跟踪控制的准确性.质量轻和长径比大导致柔性空间机械臂在运动过程中出现振动现象.为了解决上述问题,本文建立了考虑二维变形和扰动转矩的柔性空间机械臂的动力学模型,推导出简化的非线性动力学方程.在此基础上,设计了控制律,利用RBF(radial basis function)神经网络对柔性空间机械臂中的时变项和扰动转矩进行识别和补偿.然后以双曲正切函数作为逼近率,提出了滑模控制策略.最后,通过仿真和地面物理样机控制实验可以得到,在柔性空间机械臂控制律的设计中,神经网络补偿的控制策略有效地减少了扰动转矩对柔性空间机械臂的影响.并且通过使用tanh函数来代替sgn函数,能够减少输入转矩的波动,更加验证了RBF神经网络补偿滑模控制策略的有效性.
中图分类号:
李小彭, 付嘉兴, 刘海龙, 尹猛. 柔性空间机械臂RBF神经网络补偿滑模控制策略[J]. 东北大学学报(自然科学版), 2024, 45(9): 1258-1267.
Xiao-peng LI, Jia-xing FU, Hai-long LIU, Meng YIN. RBF Neural Network Compensation Sliding Mode Control Strategy for Flexible Space Manipulators[J]. Journal of Northeastern University(Natural Science), 2024, 45(9): 1258-1267.
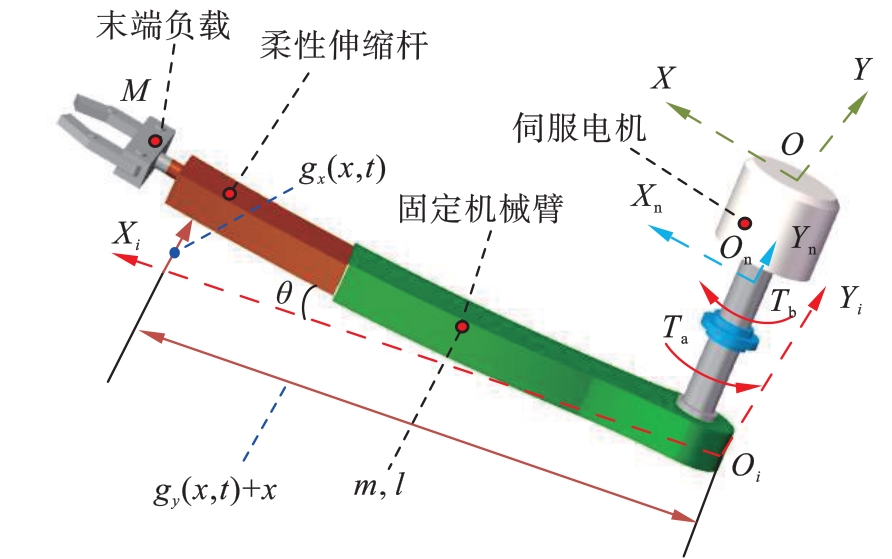
图1 柔性空间机械臂等效物理模型图
Fig.1 Equivalent physical model diagram of the flexible space manipulator
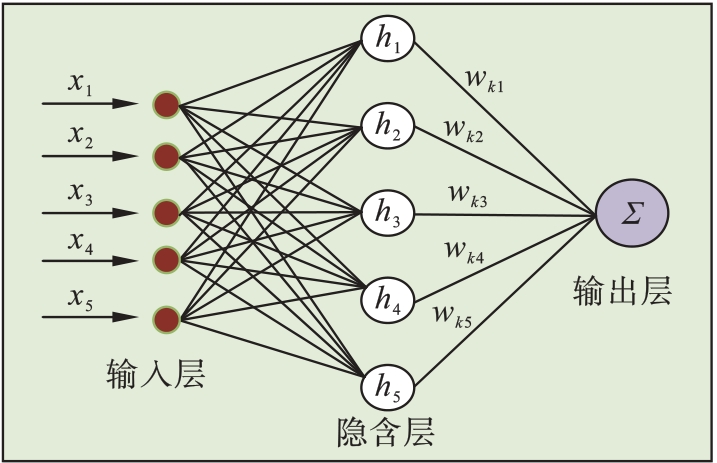
图2 RBF神经网络的结构
Fig.2 RBF neural network structure
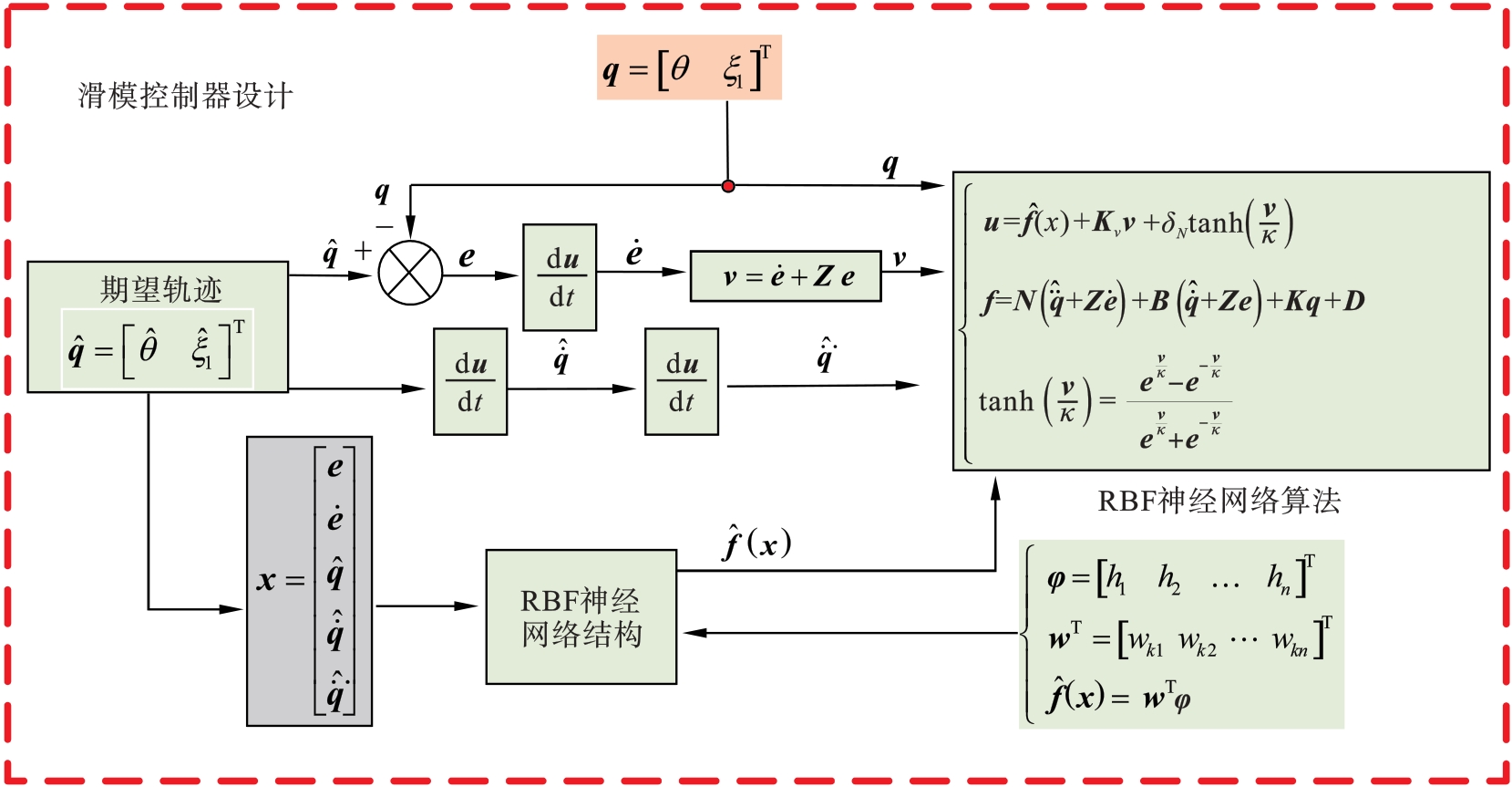
图3 采用RBF神经网络补偿控制策略的柔性空间机械臂的控制框图
Fig.3 Control block diagram of the flexible space manipulator using RBF neural network compensation control strategy
| 参数 | 值 |
|---|---|
| 柔性连杆长度l /m | 2.5 |
| 柔性连杆质量m /kg | 3 |
| 末端负载M /kg | 1 |
| 弯曲刚度σ/(N·m2) | 100 |
| 控制器参数 Z | 51 |
| 控制器参数 γ | diag[6,6] |
| 控制器系数κ | 0.01 |
| 控制器参数 Kv | 151 |
| 控制器参数δN | 12 |
表1 仿真中柔性空间机械臂和控制器的参数 (and controller in simulation)
Table 1 Parameters of the flexible space manipulator
| 参数 | 值 |
|---|---|
| 柔性连杆长度l /m | 2.5 |
| 柔性连杆质量m /kg | 3 |
| 末端负载M /kg | 1 |
| 弯曲刚度σ/(N·m2) | 100 |
| 控制器参数 Z | 51 |
| 控制器参数 γ | diag[6,6] |
| 控制器系数κ | 0.01 |
| 控制器参数 Kv | 151 |
| 控制器参数δN | 12 |
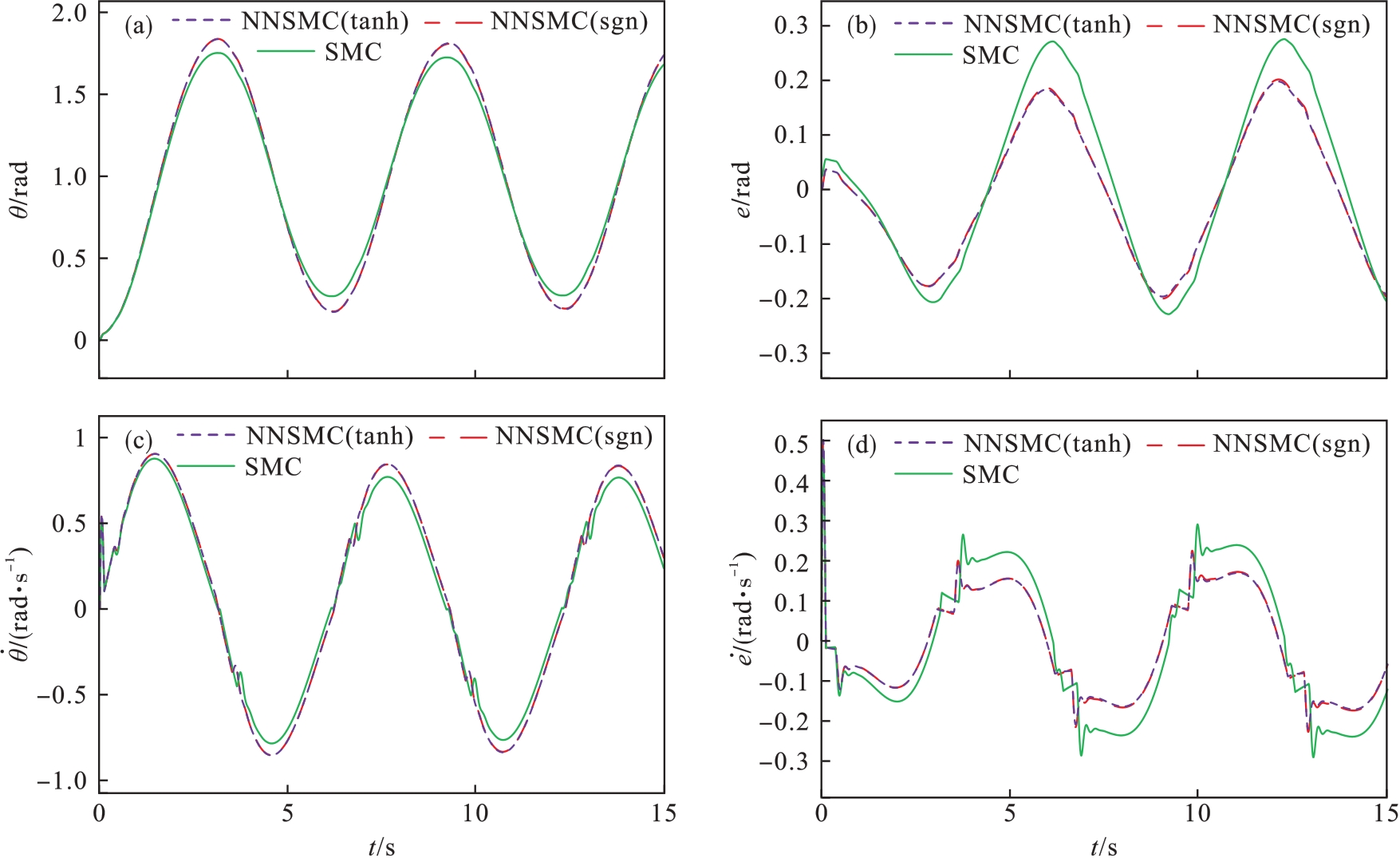
图4 不同策略下柔性空间机械臂旋转仿真结果(a)—旋转角度; (b)—旋转角度跟踪误差; (c)—角速度; (d)—速度跟踪误差.
Fig.4 Rotating simulation results of the flexible space manipulator under different strategies
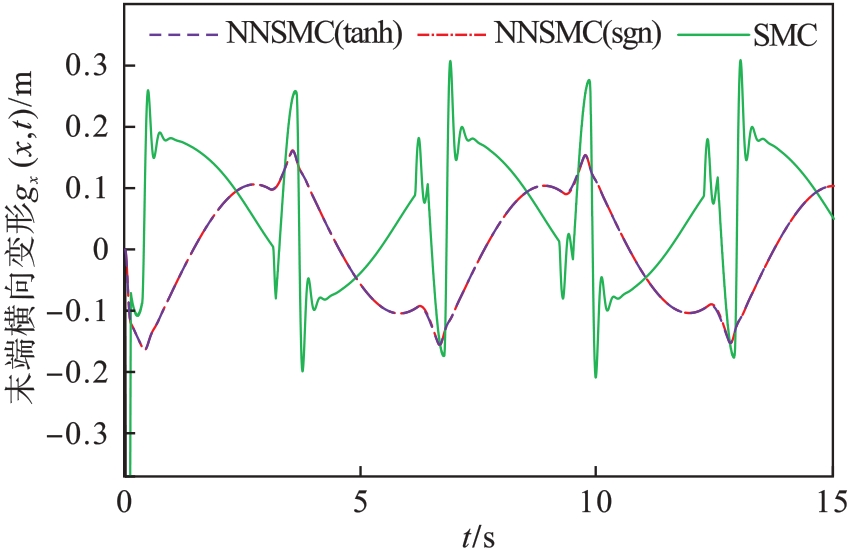
图5 柔性空间机械臂变形模拟结果
Fig.5 Deformation simulation results of the flexible space manipulator
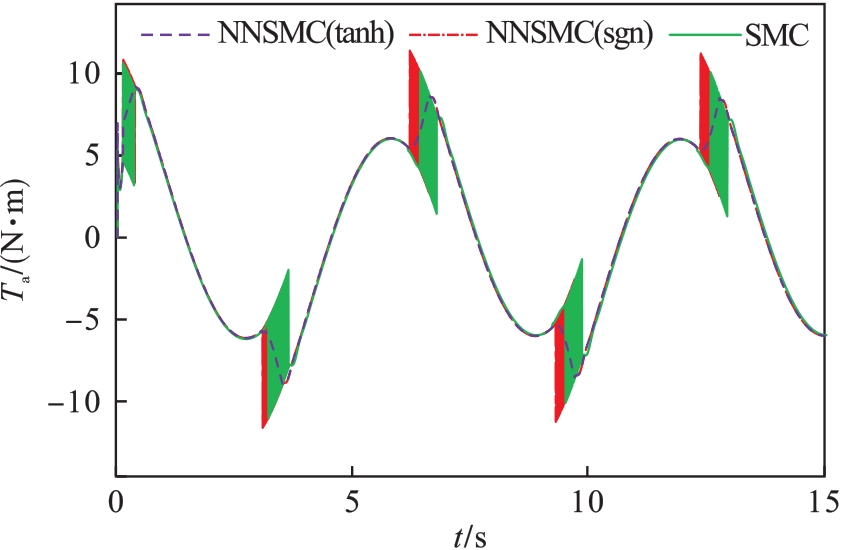
图6 柔性空间机械臂输入转矩仿真结果
Fig.6 Simulation results of input torque of the flexible space manipulator
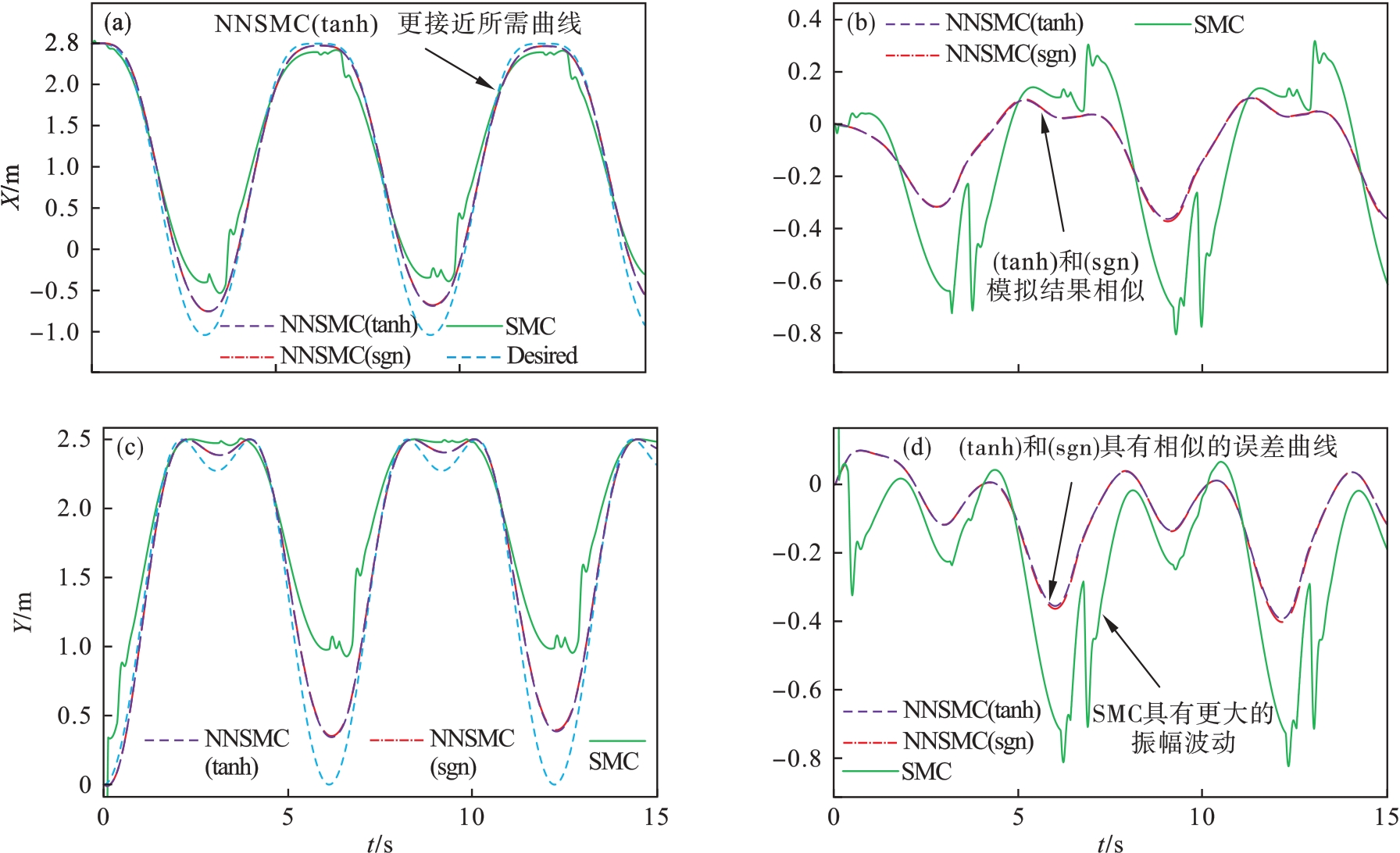
图7 柔性空间机械臂轨迹仿真结果(a)—X方向的轨迹; (b)—X方向轨迹跟踪误差; (c)—Y方向的轨迹; (d)—Y方向轨迹跟踪误差.
Fig.7 Trajectory simulation results of the flexible space manipulator
| 参数 | 值 |
|---|---|
| 柔性空间机械臂长度l/m | 0.6 |
| 尖端有效载荷M/kg | 0.8 |
| 柔性空间机械臂质量m/kg | 2.5 |
| 柔性空间机械臂线密度ρ/(kg·m-1) | 4.17 |
| 柔性空间机械臂厚度H/mm | 2 |
| 柔性空间机械臂弹性模量E/GPa | 70 |
| 柔性空间机械臂宽度W/mm | 200 |
表2 地面控制实验平台参数 (experimental platform)
Table 2 Parameters of the ground control
| 参数 | 值 |
|---|---|
| 柔性空间机械臂长度l/m | 0.6 |
| 尖端有效载荷M/kg | 0.8 |
| 柔性空间机械臂质量m/kg | 2.5 |
| 柔性空间机械臂线密度ρ/(kg·m-1) | 4.17 |
| 柔性空间机械臂厚度H/mm | 2 |
| 柔性空间机械臂弹性模量E/GPa | 70 |
| 柔性空间机械臂宽度W/mm | 200 |

图8 柔性空间机械臂地面控制实验平台实验结果
Fig.8 Experimental results of the ground control experiment platform for the flexible space manipulator
| 评价指标 | NNSMC(tanh) | NNSMC(sgn) | SMC |
|---|---|---|---|
| 平均绝对误差/rad | 0.198 | 0.209 | 0.276 |
| 标准误差 | 0.219 | 0.234 | 0.254 |
| 平均加速度/(m·s-2) | 0.069 | 0.076 | 0.104 |
| 加速度标准差 | 0.067 | 0.088 | 0.096 |
表3 一定工况下不同控制策略的评价指标 (under certain working conditions)
Table 3 Evaluation indexes of different control strategies
| 评价指标 | NNSMC(tanh) | NNSMC(sgn) | SMC |
|---|---|---|---|
| 平均绝对误差/rad | 0.198 | 0.209 | 0.276 |
| 标准误差 | 0.219 | 0.234 | 0.254 |
| 平均加速度/(m·s-2) | 0.069 | 0.076 | 0.104 |
| 加速度标准差 | 0.067 | 0.088 | 0.096 |
| 1 | Gasbarri P, Pisculli A.Dynamic/control interactions between flexible orbiting space‑robot during grasping,docking and post‑docking manoeuvres[J].Acta Astronautica,2015,110:225-238. |
| 2 | Zhao J D, Zhao Z Y, Yang X H,et al.Inverse kinematics and workspace analysis of a novel SSRMS-type reconfigurable space manipulator with two lockable passive telescopic links[J].Mechanism and Machine Theory,2023,180:105152. |
| 3 | Shang D Y, Li X P, Yin M,et al.Dynamic modeling and fuzzy adaptive control strategy for space flexible robotic arm considering joint flexibility based on improved sliding mode controller[J].Advances in Space Research,2022,70(11):3520-3539. |
| 4 | Zhang D G.Recursive Lagrangian dynamic modeling and simulation of multi‑link spatial flexible manipulator arms[J].Applied Mathematics and Mechanics,2009,30(10):1283-1294. |
| 5 | Korayem M H, Heidari A, Nikoobin A.Maximum allowable dynamic load of flexible mobile manipulators using finite element approach[J].The International Journal of Advanced Manufacturing Technology,2009,45(11):1232. |
| 6 | Nair A P, Selvaganesan N, Lalithambika V R.Lyapunov based PD/PID in model reference adaptive control for satellite launch vehicle systems[J].Aerospace Science and Technology,2016,51:70-77. |
| 7 | Chen S, Xue W C, Zhong S,et al.On comparison of modified ADRCs for nonlinear uncertain systems with time delay[J].Science China (Information Sciences),2018,61(7):70223. |
| 8 | Yang Z J, Fukushima Y, Qin P.Decentralized adaptive robust control of robot manipulators using disturbance observers[J].IEEE Transactions on Control Systems Technology,2012,20(5):1357-1365. |
| 9 | Dong C Y, Liu C, Wang Q,et al.Switched adaptive active disturbance rejection control of variable structure near space vehicles based on adaptive dynamic programming[J].Chinese Journal of Aeronautics,2019,32(7):1684-1694. |
| 10 | Qiao J Z, Wu H, Yu X.High‑precision attitude tracking control of space manipulator system under multiple disturbances[J].IEEE Transactions on Systems,Man,and Cybernetics:Systems,2021,51(7):4274-4284. |
| 11 | 王宏,郑天奇.基于滑模补偿的六轴机械臂RBF网络自适应控制[J].东北大学学报(自然科学版),2017,38(11):1601-1606. |
| Wang Hong, Zheng Tian‑qi.RBF network adaptive control based on SMC compensation for six‑axis manipulator[J].Journal of Northeastern University(Natural Science),2017,38(11):1601-1606. | |
| 12 | 曾晨东,艾海平,陈力.空间机械臂在轨插、拔孔操作力/位姿阻抗控制[J].机械工程学报,2022,58(3):84-94. |
| Zeng Chen‑dong, Ai Hai‑ping, Chen Li.Operation force/pose impedance control of space manipulator in orbit[J].Chinese Journal of Mechanical Engineering,2022,58(3):84-94. | |
| 13 | 吴昊,毛新涛,刘鹭航,等.柔性关节空间机械臂的自适应滑模控制[J].宇航学报,2019,40(6):703-710. |
| Wu Hao, Mao Xin‑tao, Liu Lu‑hang,et al.Adaptive sliding mode control for flexible joint space mechanical arms[J].Journal of Astronautics,2019,40(6):703-710. | |
| 14 | Yin X M, Wang B, Liu L,et al.Disturbance observer‑based gain adaptation high‑order sliding mode control of hypersonic vehicles[J].Aerospace Science and Technology,2019,89:19-30. |
| 15 | Yao Q J.Adaptive trajectory tracking control of a free‑flying space manipulator with guaranteed prescribed performance and actuator saturation[J].Acta Astronautica,2021,185:283-298. |
| 16 | 张建宇,高天宇,于潇雁,等.基于自适应时延估计的空间机械臂连续非奇异终端滑模控制[J].机械工程学报,2021,57(11):177-183. |
| Zhang Jian‑yu, Gao Tian‑yu, Yu Xiao‑yan,et al.Continuous non‑singular terminal sliding mode control of space manipulator based on adaptive time delay estimation[J].Journal of Mechanical Engineering,2021,57(11):177-183. | |
| 17 | Wu S X, Chen L, Zhang D X,et al.Disturbance observer‑based fixed time sliding mode control for spacecraft proximity operations with coupled dynamics[J].Advances in Space Research,2020,66(9):2179-2193. |
| 18 | Jia S Y, Shan J J.Finite‑time trajectory tracking control of space manipulator under actuator saturation[J].IEEE Transactions on Industrial Electronics,2020,67(3):2086-2096. |
| 19 | Johanastrom K, de Canudas W C.Revisiting the LuGre friction model[J].IEEE Control Systems Magazine,2008,28(6):101-114. |
| 20 | Shang D Y, Li X P, Yin M,et al.Tracking control strategy for space flexible manipulator considering nonlinear friction torque based on adaptive fuzzy compensation sliding mode controller[J].Advances in Space Research,2023,71(9):3661-3680. |
| 21 | Gu H C, Song G B, Malki H.Chattering‑free fuzzy adaptive robust sliding‑mode vibration control of a smart flexible beam[J].Smart Materials and Structures,2008,17(3):035007. |
| 22 | Shang D Y, Li X P, Yin M,et al.Vibration suppression for two‑inertia system with variable‑length flexible load based on neural network compensation sliding mode controller and angle‑independent method[J].IEEE/ASME Transactions on Mechatronics,2023,28(2):848-859. |
| 23 | 尚东阳,李小彭,尹猛,等.采用RBF神经网络辨识的柔性机械臂抑振控制策略[J].西安交通大学学报,2022,56(6):76-84. |
| Shang Dong‑yang, Li Xiao‑peng, Yin Meng,et al.Vibration suppression control strategy of flexible manipulator based on RBF neural network identification[J].Journal of Xi'an Jiaotong University,2022,56(6):76-84. |
| [1] | 杨冬梅, 杜玲秀, 祝春霞. 非线性广义时滞Markov跳变系统的 |
| [2] | 张春雷, 李鹤, 董茂林, 张圣杰. 燃料电池空气供应系统自适应神经网络滑模控制[J]. 东北大学学报(自然科学版), 2022, 43(9): 1270-1276. |
| [3] | 胡蛟, 胡茑庆, 沈建, 罗鹏. 直升机主减典型部件故障动力学建模与仿真[J]. 东北大学学报(自然科学版), 2022, 43(12): 1732-1740. |
| [4] | 李惜笑, 杨冬梅. 不确定分数阶广义系统的滑模控制器设计与仿真[J]. 东北大学学报(自然科学版), 2022, 43(11): 1521-1528. |
| [5] | 陆志国, 王世雄, 林梦磊. RBF网络干扰补偿的跷跷板系统解耦滑模控制研究[J]. 东北大学学报(自然科学版), 2021, 42(5): 679-686. |
| [6] | 井元伟, 白云. 基于事件触发的TCP网络滑模控制[J]. 东北大学学报(自然科学版), 2021, 42(4): 457-462. |
| [7] | 王大志, 高明, 李召. 移相全桥的重积分间接滑模控制策略[J]. 东北大学学报:自然科学版, 2018, 39(8): 1069-1074. |
| [8] | 王宏, 郑天奇, 纪俐, 陆志国. 基于T-S模糊补偿的六轴机械臂的滑模鲁棒控制[J]. 东北大学学报:自然科学版, 2018, 39(3): 378-383. |
| [9] | 王宏, 郑天奇. 基于滑模补偿的六轴机械臂RBF网络自适应控制[J]. 东北大学学报:自然科学版, 2017, 38(11): 1601-1606. |
| [10] | 杨辉, 郝丽娜, 孙智涌, 陈洋. 面向人工肌肉驱动器的无模型自适应滑模控制研究[J]. 东北大学学报:自然科学版, 2017, 38(11): 1618-1622. |
| [11] | 李翔宇, 高宪文, 侯延彬, 王宏日. 游梁式抽油机悬点负载耦合动力学建模[J]. 东北大学学报:自然科学版, 2016, 37(9): 1225-1229. |
| [12] | 周淑文, 陈庆明, 孙大明. 基于EMB系统的整车ABS滑模变结构控制[J]. 东北大学学报:自然科学版, 2016, 37(7): 994-997. |
| [13] | 窦景欣, 孔祥希, 闻邦椿. 四旋翼姿态的反步滑模自抗扰控制及稳定性[J]. 东北大学学报:自然科学版, 2016, 37(10): 1415-1420. |
| [14] | 叶成荫,井元伟,郑艳,褚俊霞. 基于终端滑模控制的有限时间拥塞控制[J]. 东北大学学报:自然科学版, 2014, 35(6): 761-765. |
| [15] | 王宏伟,于驰,王素欣. 基于输出反馈的离散滑模控制器设计[J]. 东北大学学报(自然科学版), 2013, 34(4): 465-468. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||