东北大学学报(自然科学版) ›› 2024, Vol. 45 ›› Issue (9): 1287-1293.DOI: 10.12068/j.issn.1005-3026.2024.09.009
• 机械工程 • 上一篇
王海芳( ), 乔鼎杰, 吴天浩, 黄鹏
), 乔鼎杰, 吴天浩, 黄鹏
Hai-fang WANG(), Ding-jie QIAO, Tian-hao WU, Peng HUANG
摘要:
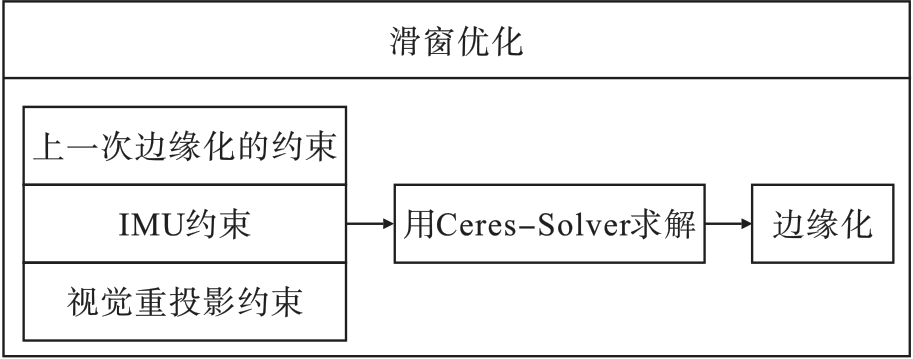
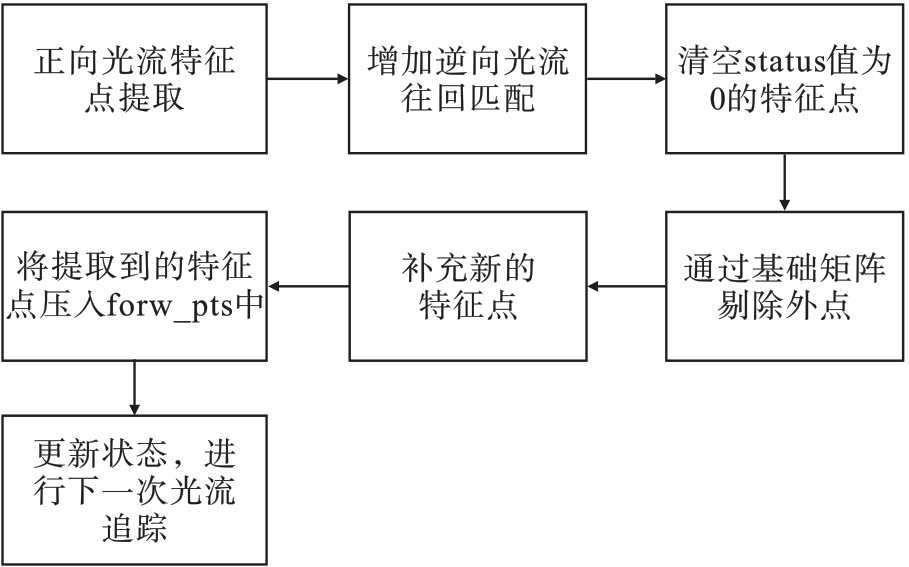
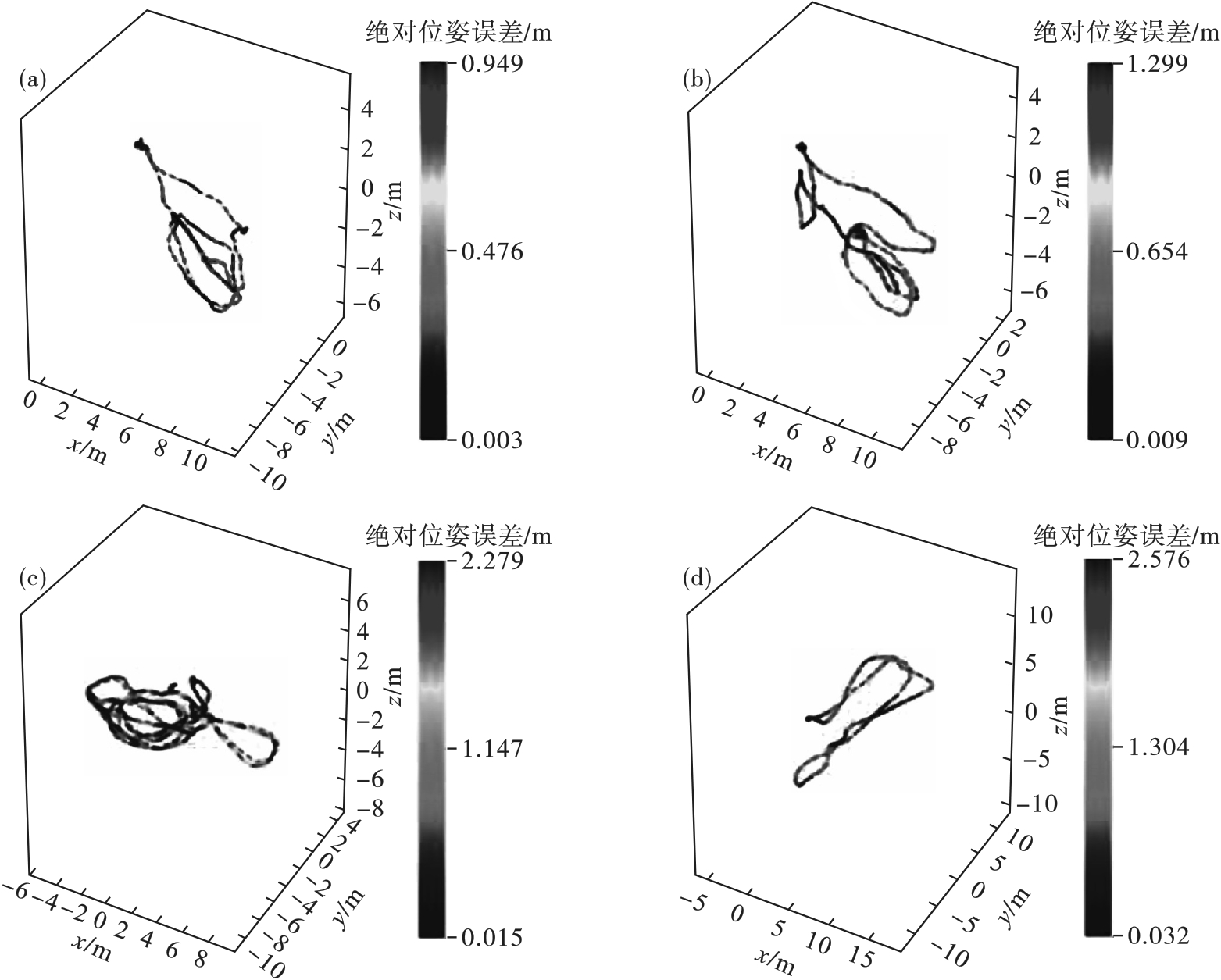
针对传统的即时定位并建图(simultaneous localization and mapping, SLAM)算法在位姿识别过程中对精度的要求,在VINS-Mono(visual inertial system-Mono)的前端部分,增加了逆向光流法;针对SLAM算法对实时性的要求,在VINS-Mono的后端滑窗优化方法中,融合了一种边缘化优化算法,再对除相机位姿的部分进行边缘化,然后边缘化相机的位姿部分,从而加速边缘化的过程.再使用EuRoc(European robotics challenge)数据集进行实验,结果发现针对前端的改进策略,精度提升不明显,并分析了原因;针对后端的改进策略,改进算法的边缘化时间平均减少了25.9%,又对比了改进算法与源码的轨迹精度,发现误差可控.最后验证了对VINS-Mono后端的改进策略在实时性上具有优越性.
中图分类号: