东北大学学报(自然科学版) ›› 2025, Vol. 46 ›› Issue (4): 1-7.DOI: 10.12068/j.issn.1005-3026.2025.20230303
• 信息与控制 •
梁亮, 吴成东, 刘世昌
Liang LIANG, Cheng-dong WU, Shi-chang LIU
摘要:
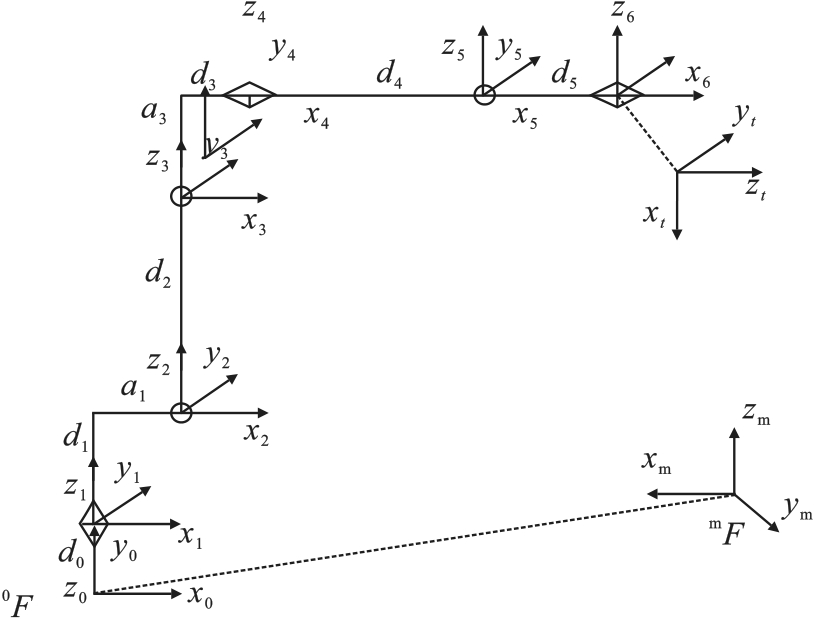
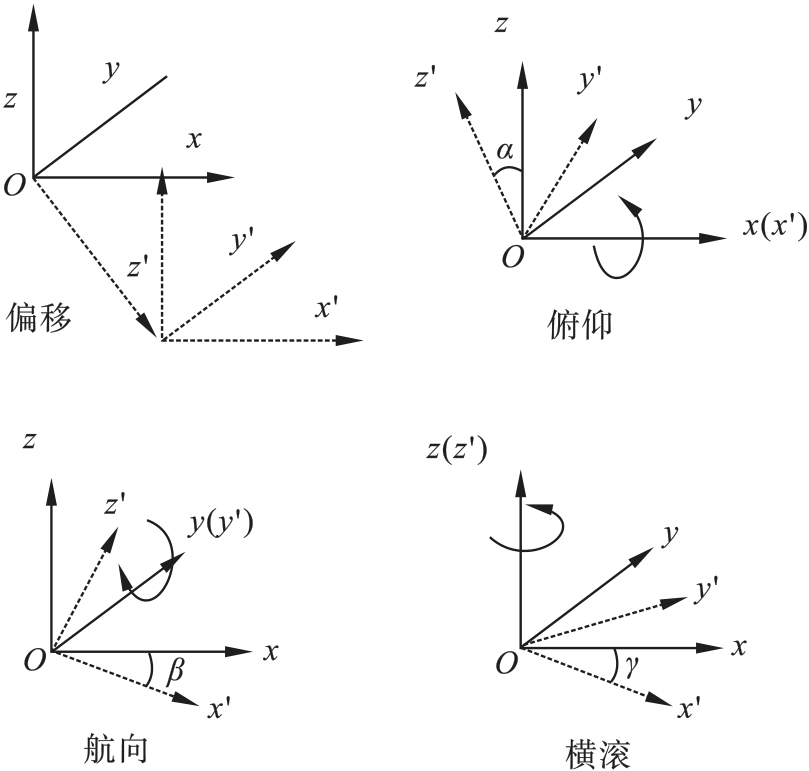
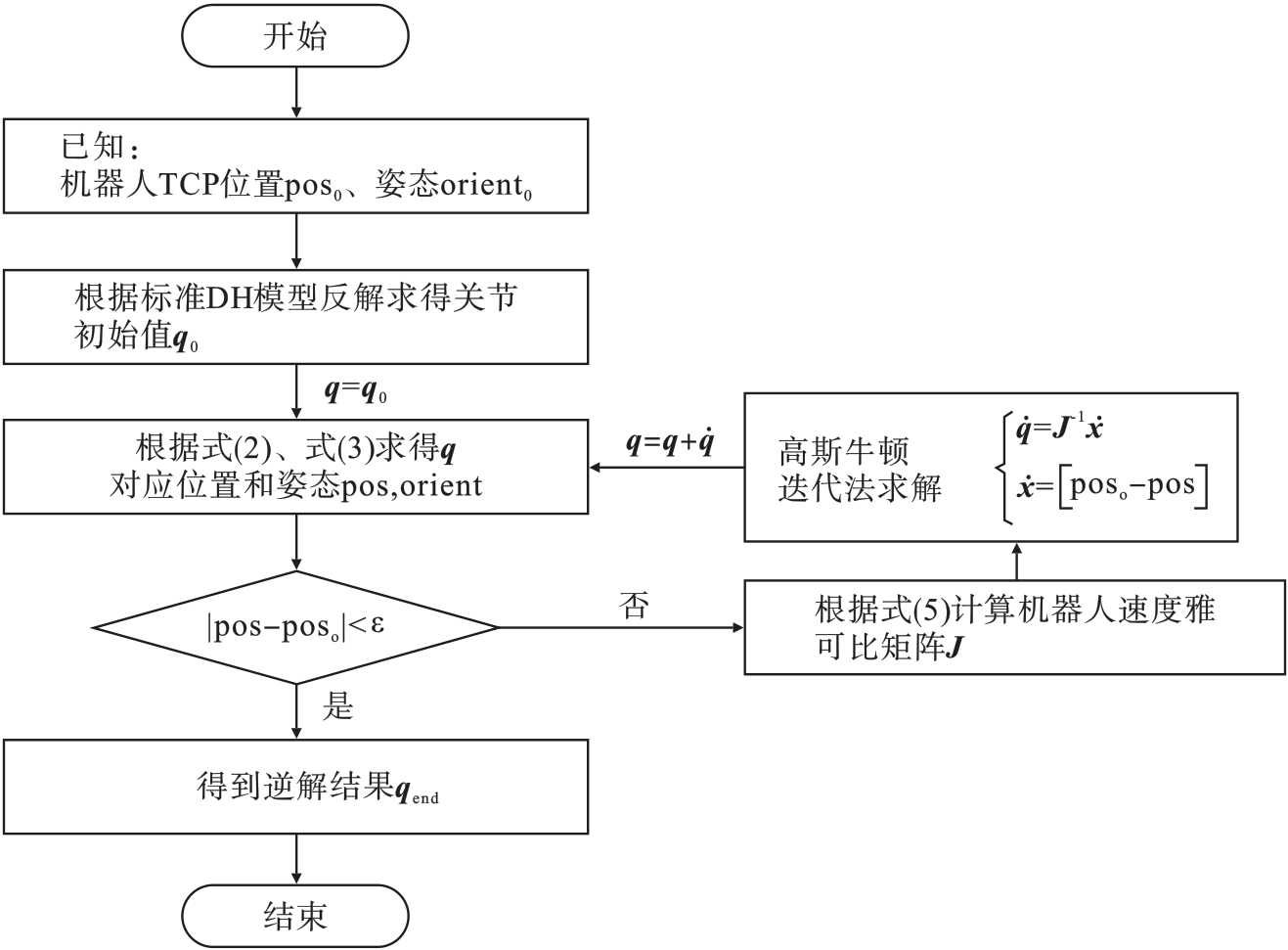
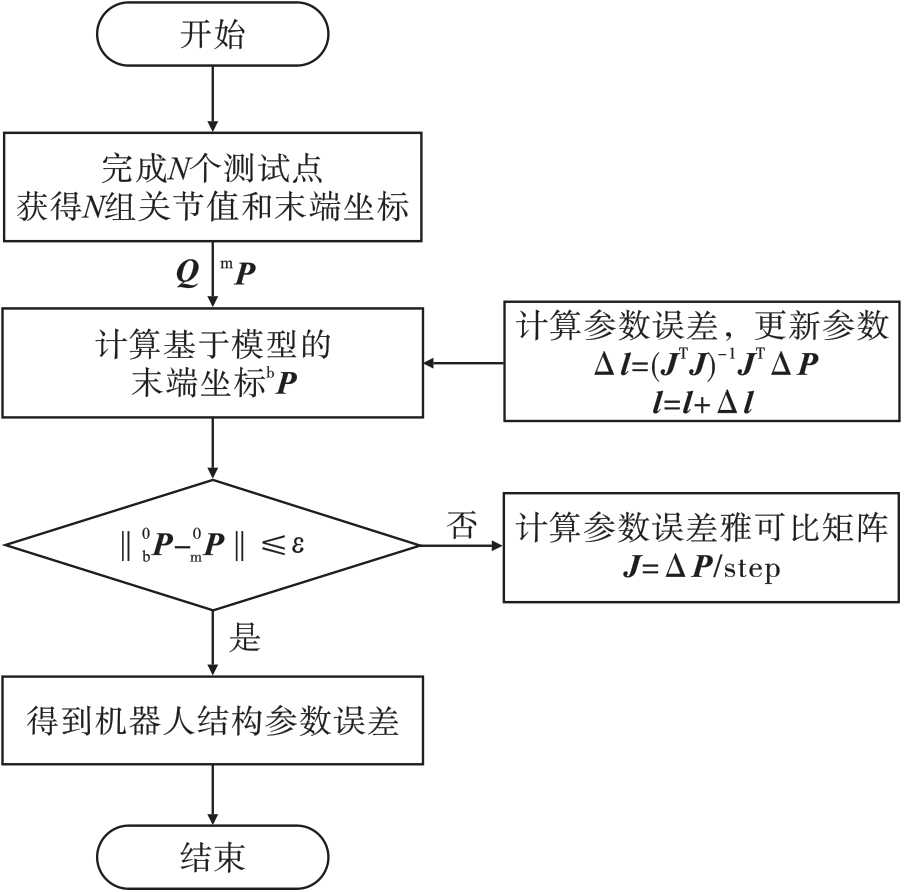
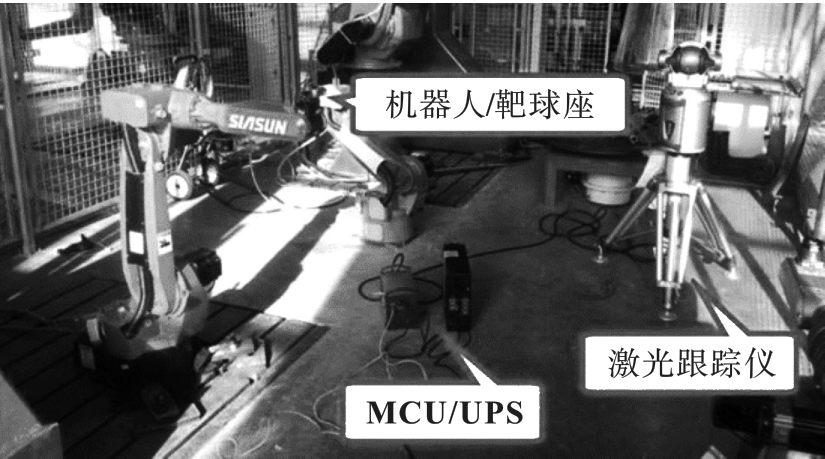
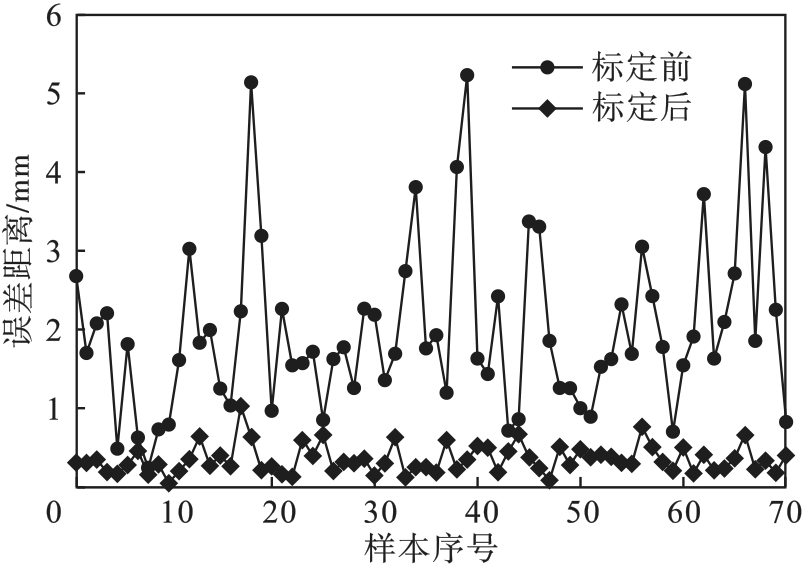
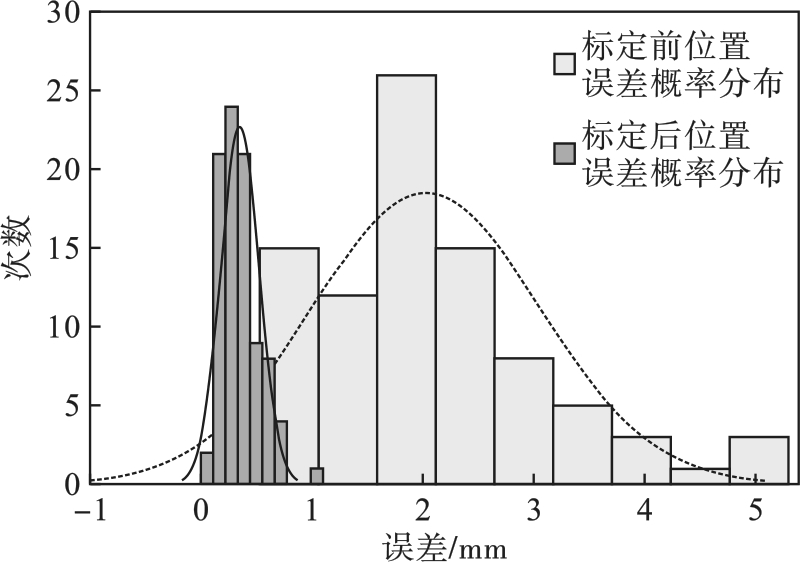
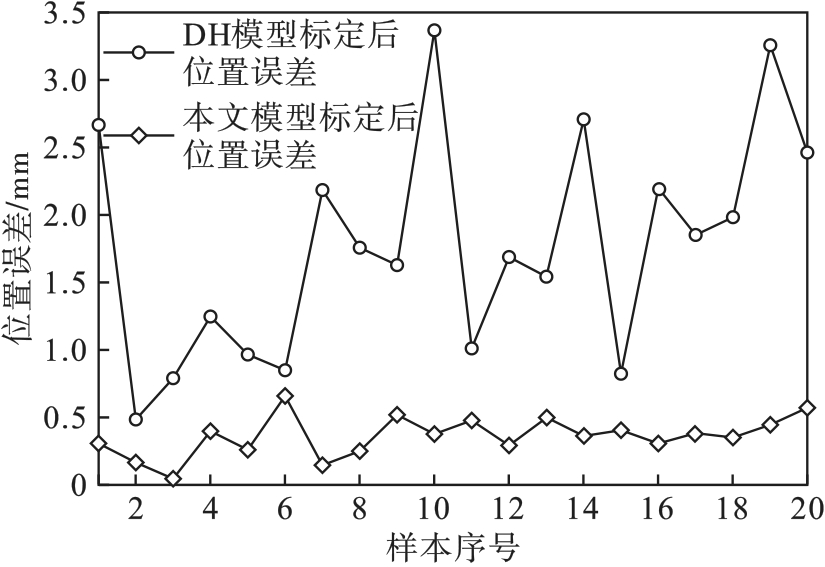
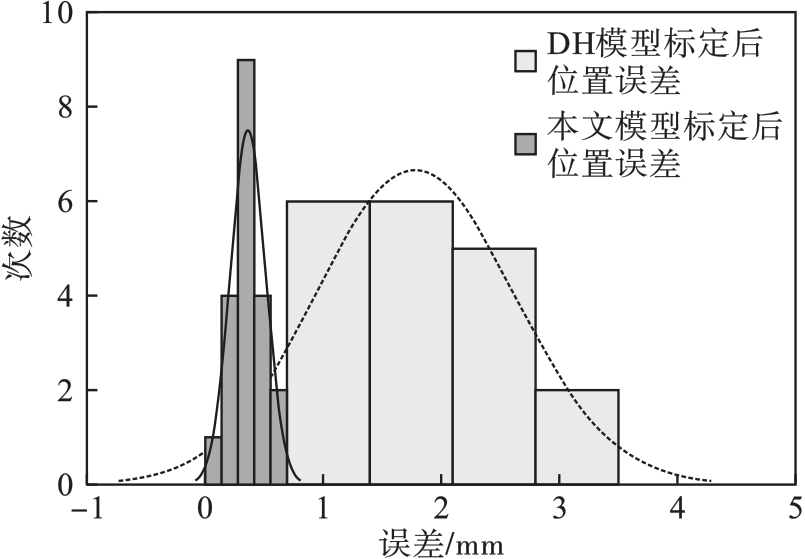
提出一种引入关节几何误差参数的工业机器人运动学模型和误差参数标定算法.首先,在DH(Denavit-Hartenberg)模型基础上,为每个关节引入6个几何误差参数,建立更为完善的标定误差模型,并实现该模型的正逆运动学求解算法.然后,建立包含关节误差、基坐标误差和工具坐标误差共45个参数的微分运动学雅可比矩阵,并采用小样本测试集实现基于迭代算法的误差参数求解.最后,在新松SR10C机器人上使用激光跟踪仪完成实验验证,将标定得到的误差参数补偿到模型中.结果表明,经过标定补偿后的机器人最大位置误差减小约80%,平均位置误差减小约80%,误差方差减小约97%,证明该方法可大幅提升工业机器人绝对位置精度和确定性.
中图分类号: