东北大学学报(自然科学版) ›› 2025, Vol. 46 ›› Issue (11): 12-18.DOI: 10.12068/j.issn.1005-3026.2025.20240092
王宏伟( ), 张晴晴, 汪洵
), 张晴晴, 汪洵
Hong-wei WANG(), Qing-qing ZHANG, Xun WANG
摘要:
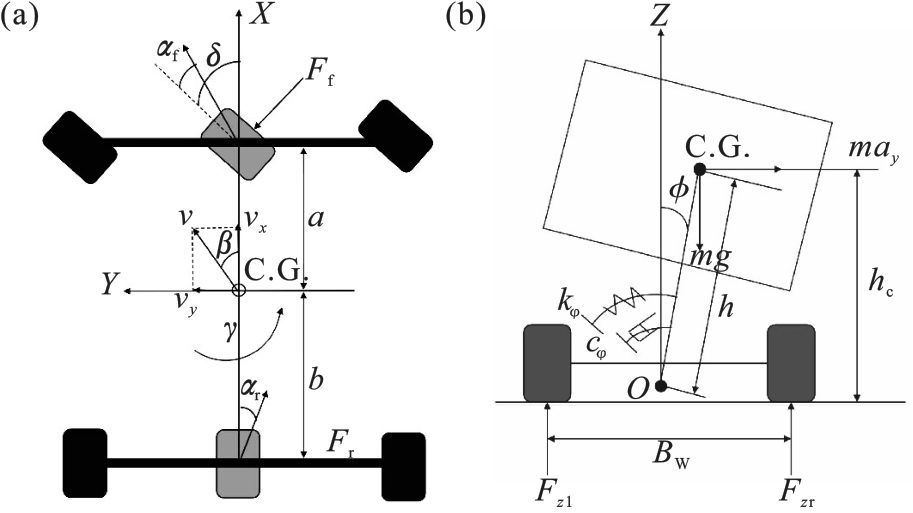
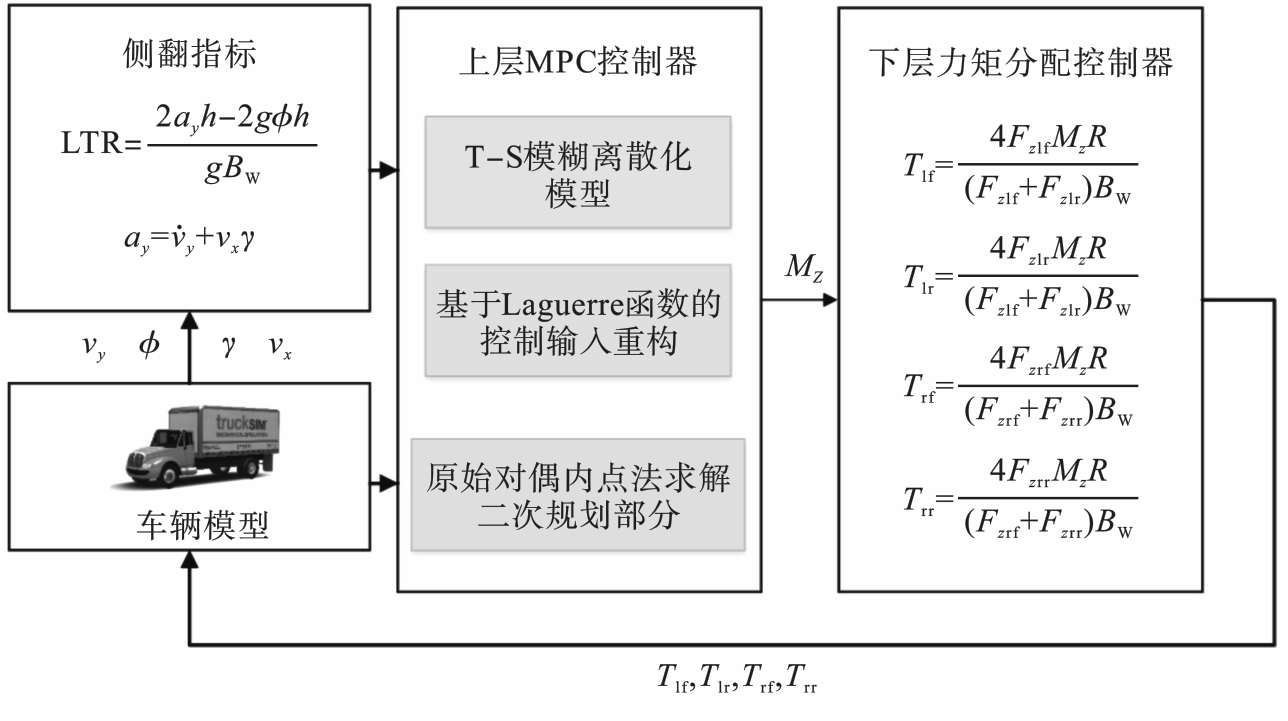
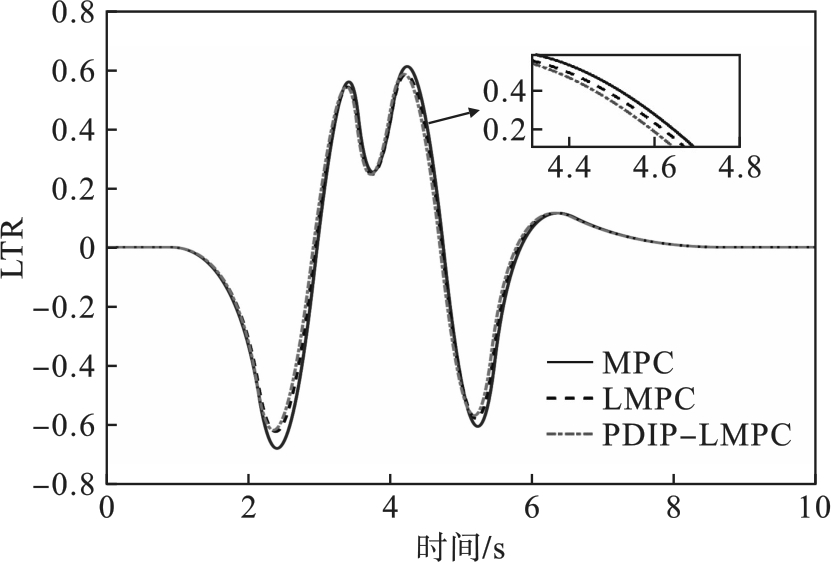
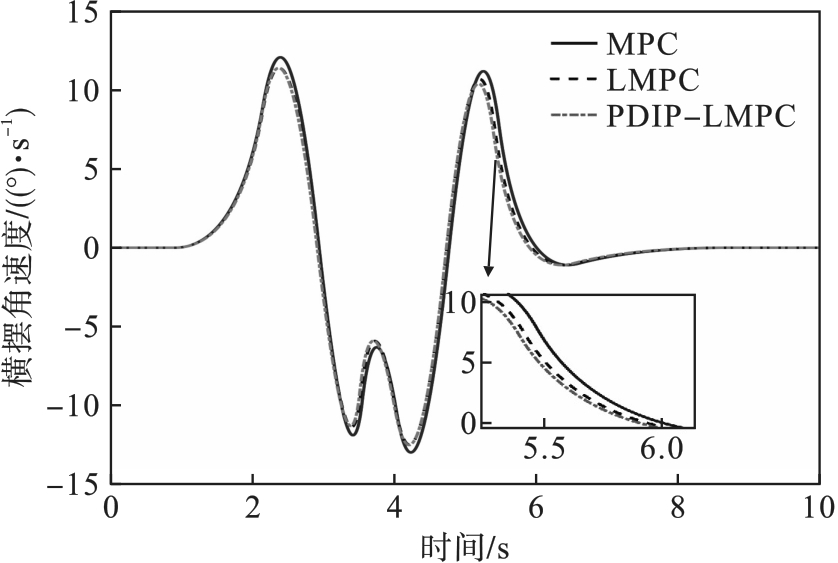
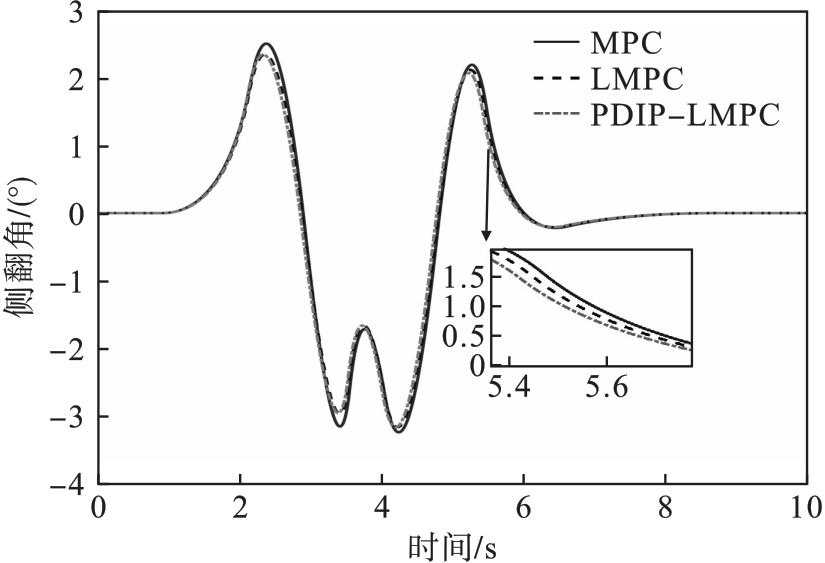
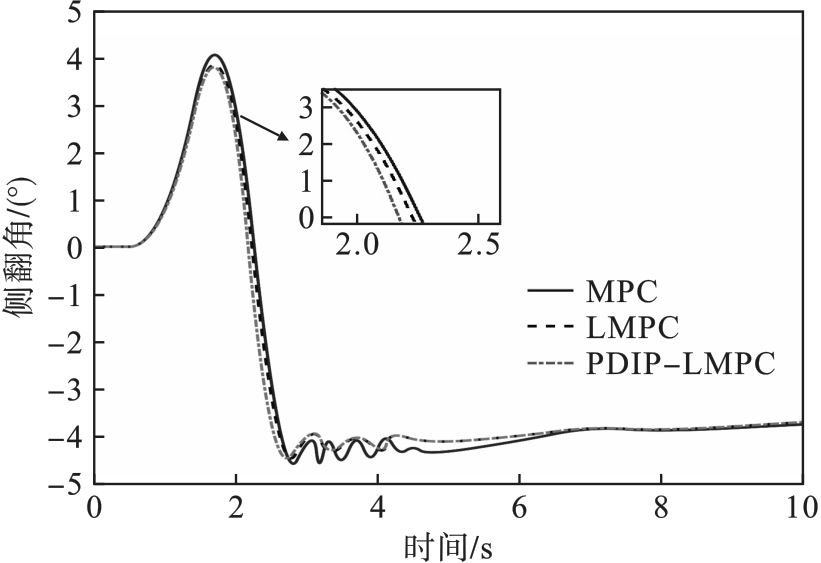
为解决重型车辆易发生侧翻的问题,提出一种基于快速模型预测的主动安全控制方法.首先,建立重型车辆非线性动力学模型,利用T-S模糊方法将非线性系统转化为线性系统;采用分层控制策略,上层设计模型预测控制(model predictive control,MPC)防侧翻控制器获得最优横摆力矩,下层利用单侧车轮控制方式进行制动力分配.然后,为减少控制器的计算负担,引入Laguerre函数对控制输入序列进行重构,采用原始对偶内点法处理约束条件,实时高效地求解二次规划函数.最后,在典型工况下进行MATLAB/Simulink和TruckSim联合仿真.结果表明,相较于传统MPC控制器,所提的快速MPC控制器能够在保证性能的同时有效提高计算效率,可以及时避免车辆侧翻失稳.
中图分类号: