东北大学学报(自然科学版) ›› 2024, Vol. 45 ›› Issue (5): 683-689.DOI: 10.12068/j.issn.1005-3026.2024.05.010
• 机械工程 • 上一篇
陆志国, 王逍
Zhi-guo LU, Xiao WANG
摘要:
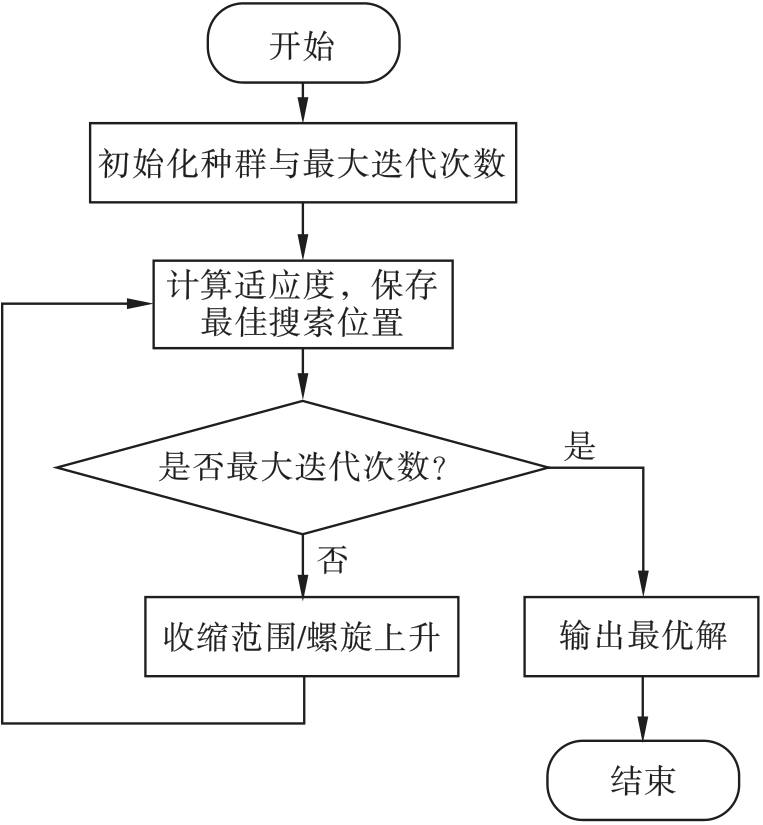
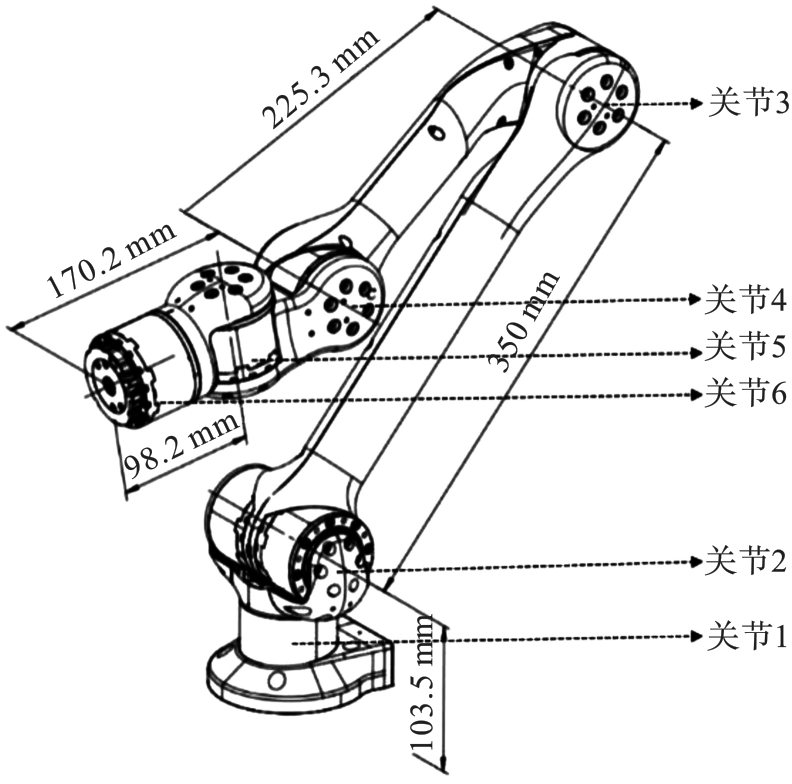
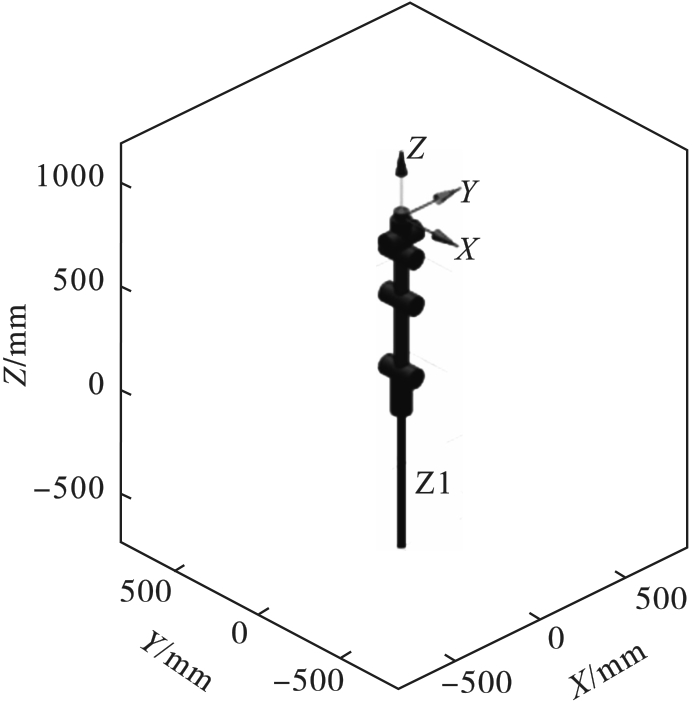
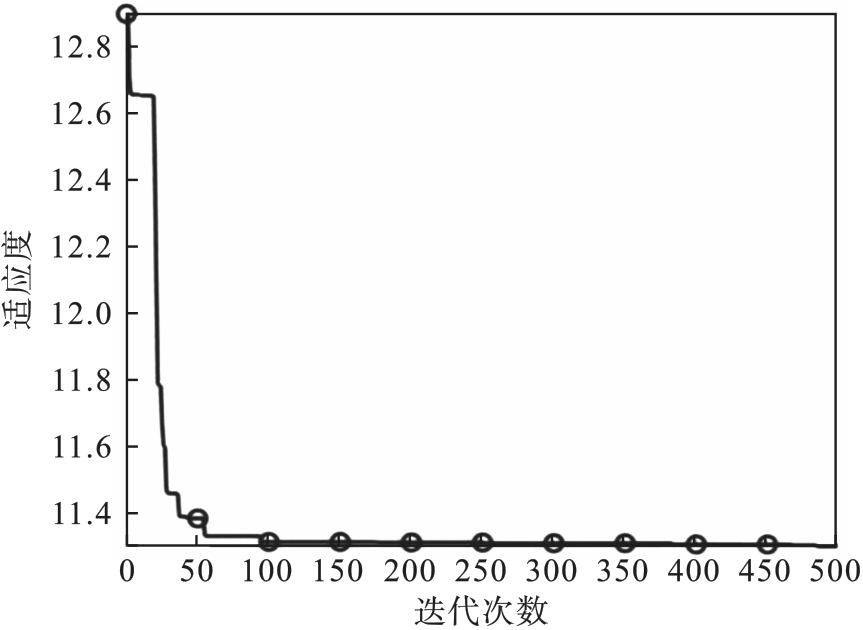
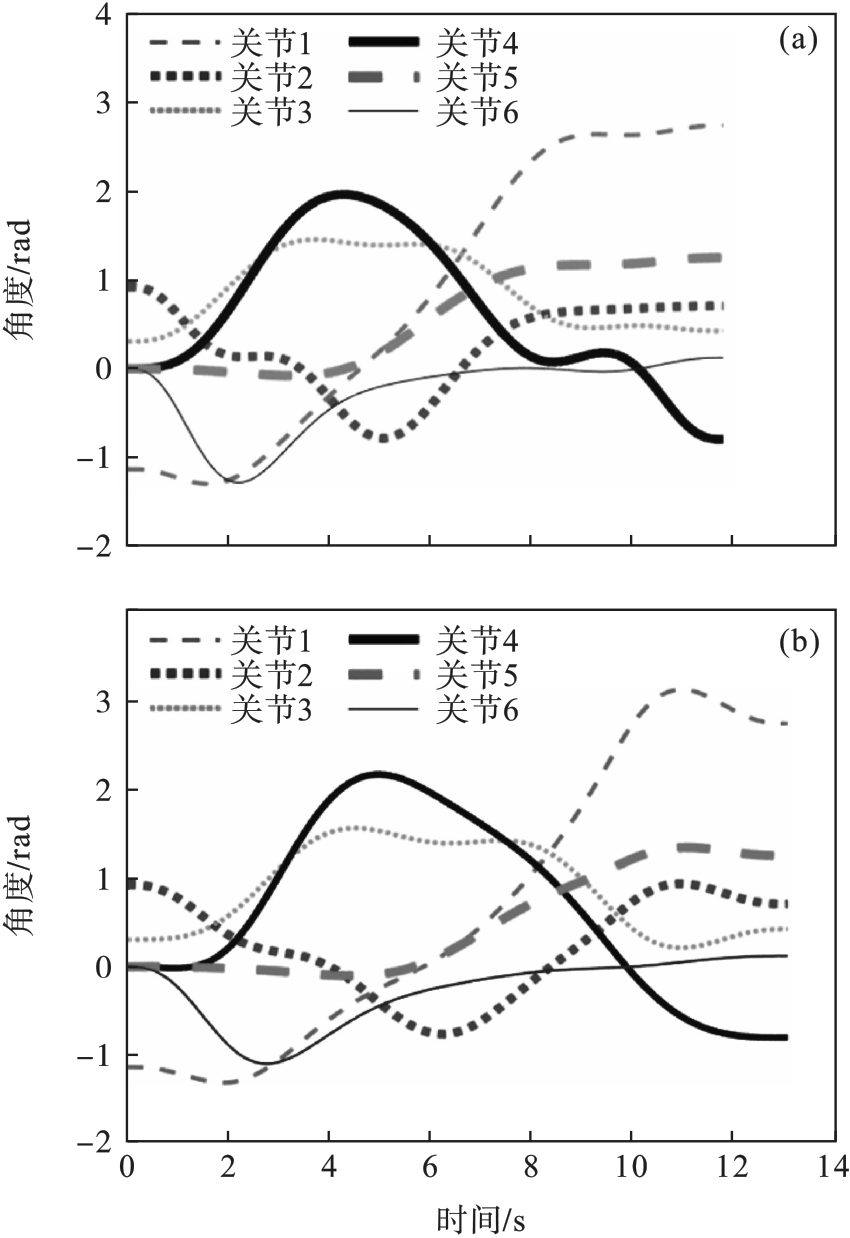
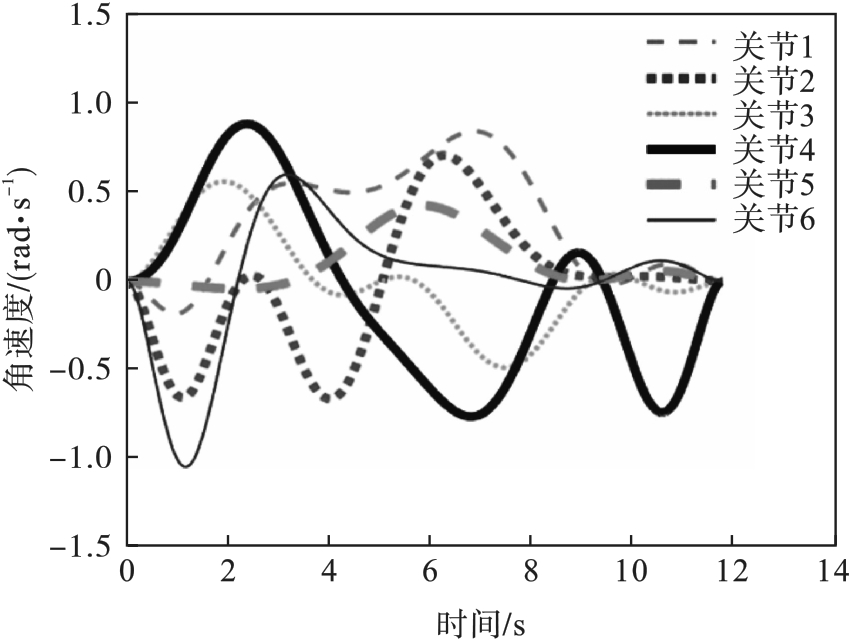
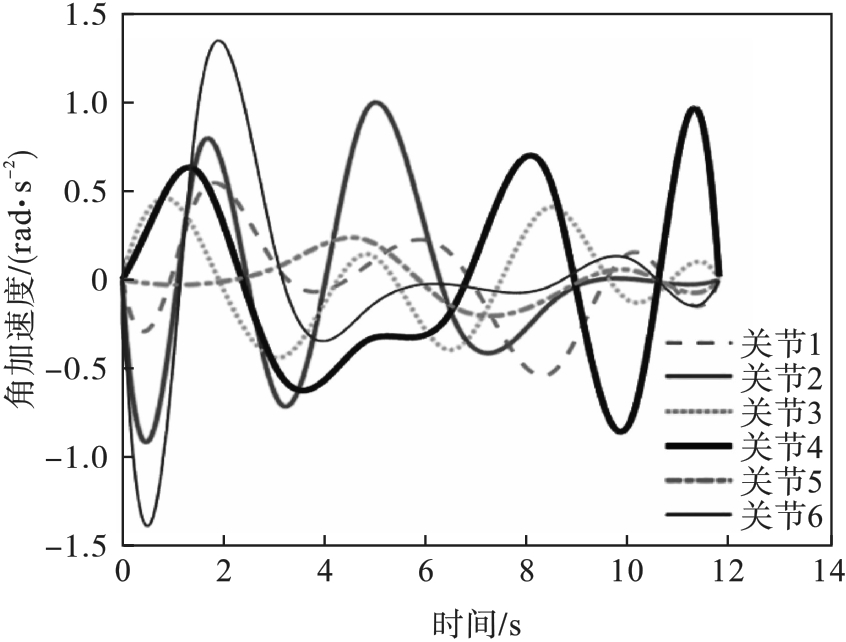
为了提高机械臂的工作效率,构建一种基于B样条与鲸鱼优化算法(whale optimization algorithm, WOA)的机械臂时间最优轨迹规划方法.用蒙特卡罗法描绘机械臂的工作空间,用B样条对给出的路径点进行插值处理,根据机械臂各个关节的性能,引入角速度与角加速度约束,同时加入边界条件.在构建时间最优的目标函数后,利用引入惯性权重值的WOA对机械臂运行时间进行优化.用Matlab进行仿真验证,结果表明构建的算法在时间优化方面效果好于传统的5次多项式方法,并且角速度与角加速度曲线连续平滑,验证了算法的有效性和可行性.
中图分类号: