东北大学学报(自然科学版) ›› 2025, Vol. 46 ›› Issue (2): 76-84.DOI: 10.12068/j.issn.1005-3026.2025.20230240
李小彭1,2( ), 李雪东1, 樊星1, 石冰2
), 李雪东1, 樊星1, 石冰2
收稿日期:2023-08-18
出版日期:2025-02-15
发布日期:2025-05-20
通讯作者:
李小彭
作者简介:李小彭(1976—),男,江西宁都人,东北大学教授,博士生导师.
基金资助:
Xiao-peng LI1,2(), Xue-dong LI1, Xing FAN1, Bing SHI2
Received:2023-08-18
Online:2025-02-15
Published:2025-05-20
Contact:
Xiao-peng LI
摘要:
巡检机器人在风载荷作用下会发生一定的摆动,从而导致巡检结果准确性和可靠性降低,参考旋翼类飞行器设计了巡检机器人在风载荷下的平衡机构.首先,利用电机的动力学方程推导电机电压和转速之间的传递函数,使用叶素法建立旋翼产生的升力与旋翼转速之间的关系,从而建立平衡机构的输入电压和输出升力之间的联系.其次,分析不同方向的风载荷对巡检机器人工作状态的影响,建立了巡检机器人在横向风载荷下的摆动数学模型.最后,将模糊PID(proportional integral derivative)应用于平衡机构的控制中,开展了巡检机器人的数值仿真和样机实验.结果表明:所设计的平衡机构可以有效抑制巡检机器人在风载荷中的摆动.
中图分类号:
李小彭, 李雪东, 樊星, 石冰. 基于模糊PID控制的输电线路巡检机器人自平衡机理分析[J]. 东北大学学报(自然科学版), 2025, 46(2): 76-84.
Xiao-peng LI, Xue-dong LI, Xing FAN, Bing SHI. Analysis of Self-Balancing Mechanism of Transmission Line Inspection Robot Based on Fuzzy PID Control[J]. Journal of Northeastern University(Natural Science), 2025, 46(2): 76-84.
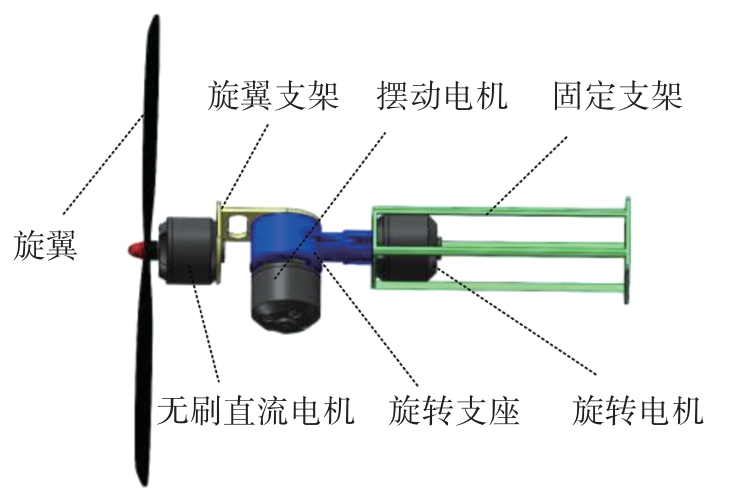
图1 旋翼系统模型
Fig. 1 Rotor system model
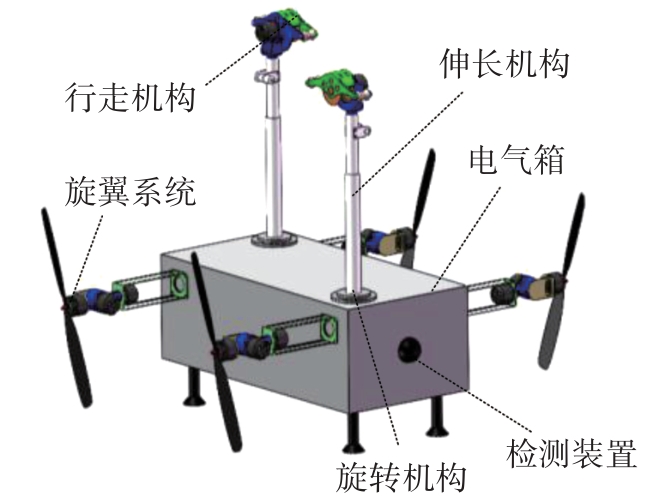
图2 巡检机器人简化模型
Fig. 2 Simplified model of the inspection robot
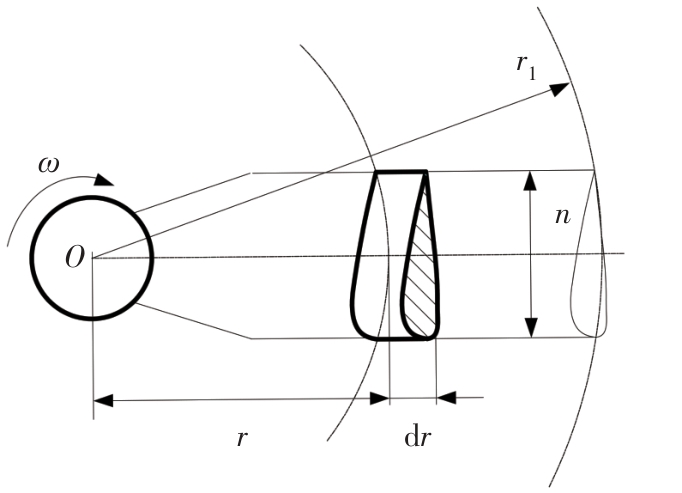
图3 旋翼上的叶素
Fig. 3 Blade element on the rotor
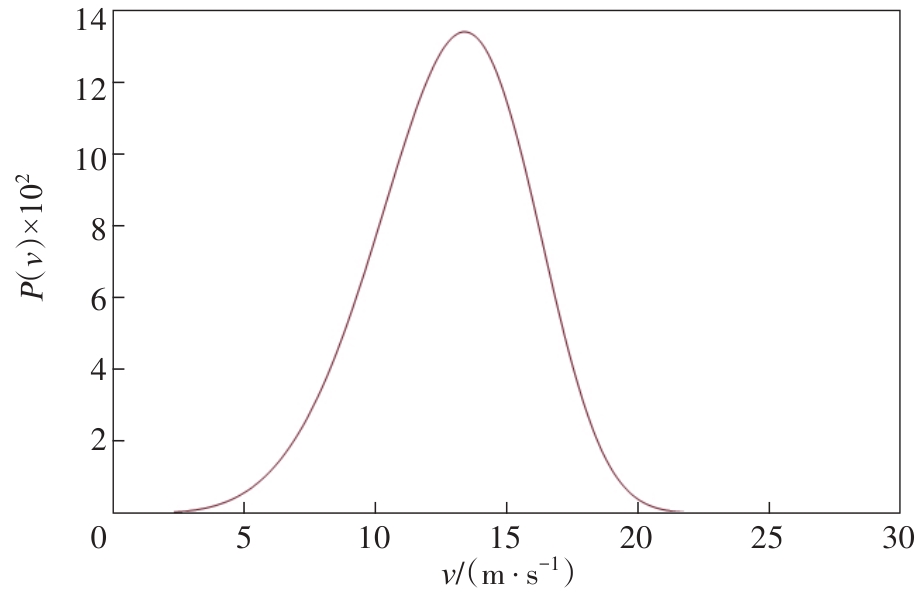
图4 风速概率分布
Fig. 4 Probability distribution of wind speed
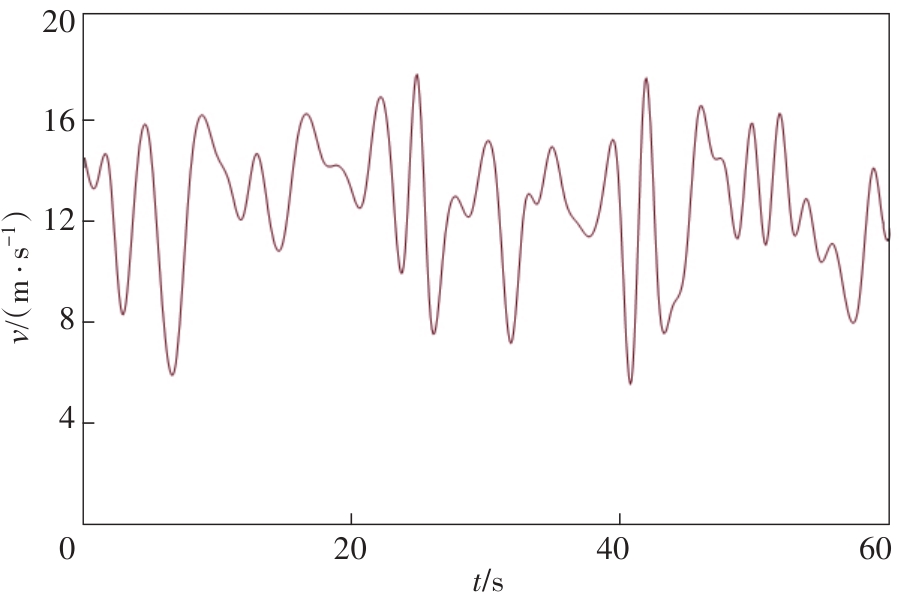
图5 风速时程
Fig. 5 Time schedule of wind speed
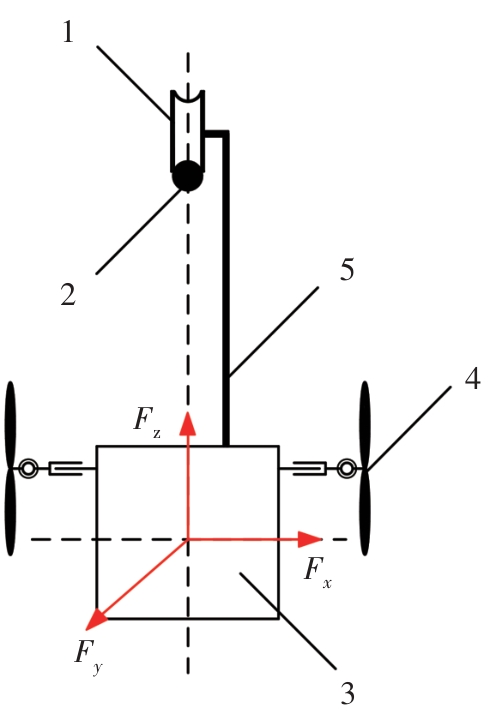
图6 风载荷图解1—行走轮;2—输电线;3—电气箱;4—旋翼系统;5—机械臂.
Fig. 6 Wind load diagram
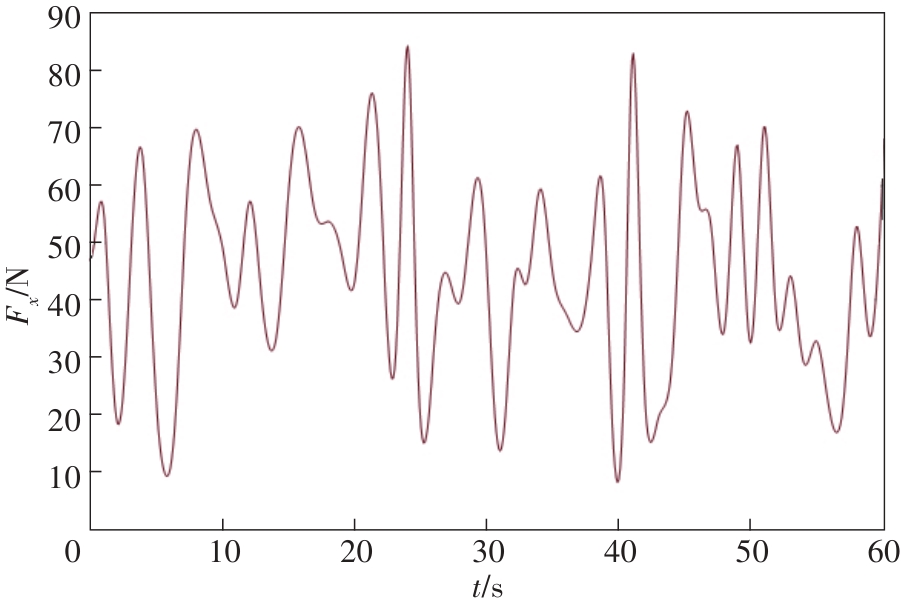
图7 巡检机器人所受的横向风载荷
Fig. 7 Transverse wind load on the inspection robot
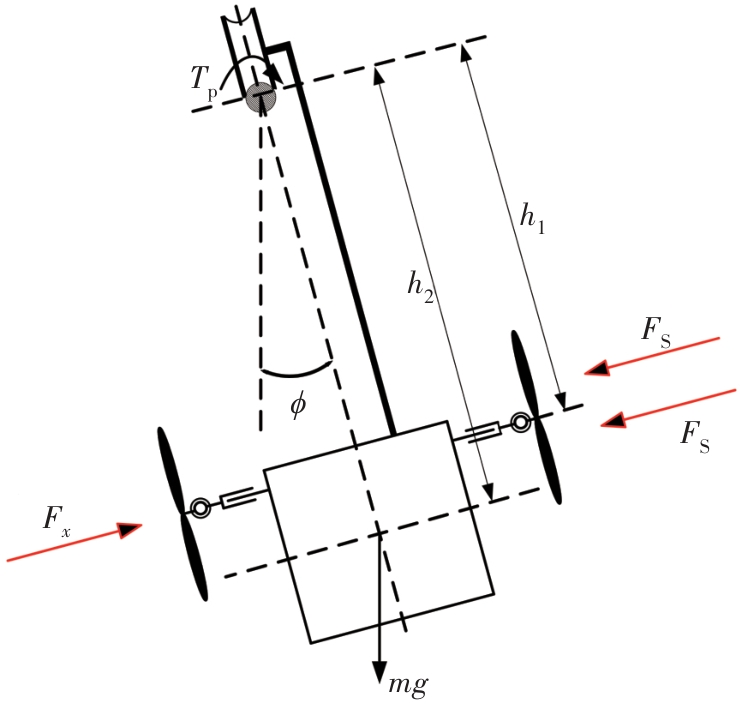
图8 巡检机器人的摆动模型
Fig. 8 Swing model of the inspection robot
| 参数 | 取值 |
|---|---|
| m/kg | 30 |
| h1/m | 0.5 |
| h2/m | 0.6 |
| c0/(N·s·m-1) | 10 |
| g/(m·s-2) | 9.8 |
表1 巡检机器人参数
Table 1 Parameters of the inspection robot
| 参数 | 取值 |
|---|---|
| m/kg | 30 |
| h1/m | 0.5 |
| h2/m | 0.6 |
| c0/(N·s·m-1) | 10 |
| g/(m·s-2) | 9.8 |
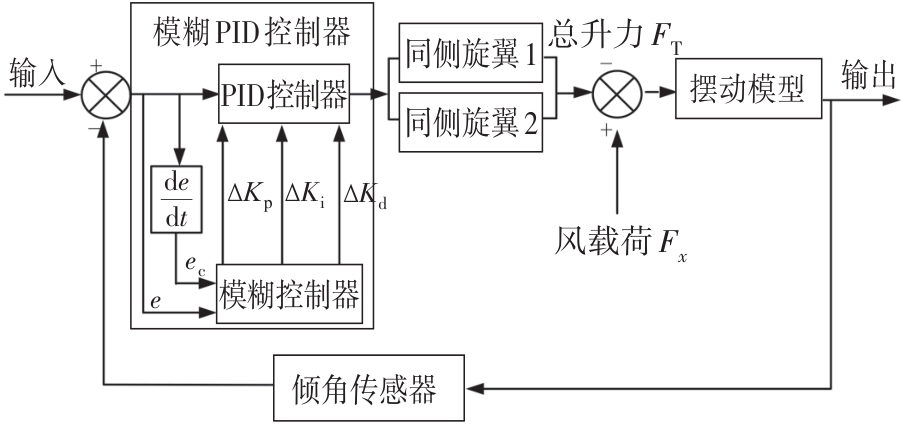
图9 模糊PID控制器用于摆动系统控制的原理图
Fig. 9 Schematic diagram of fuzzy PID controler for the swing system
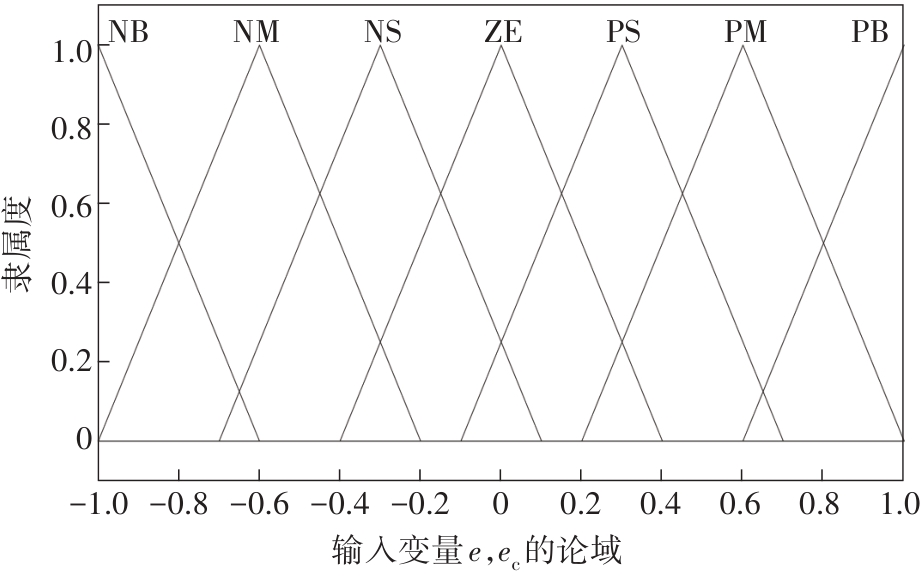
图10 输入变量的隶属度曲线
Fig. 10 Membership curves of the input variables
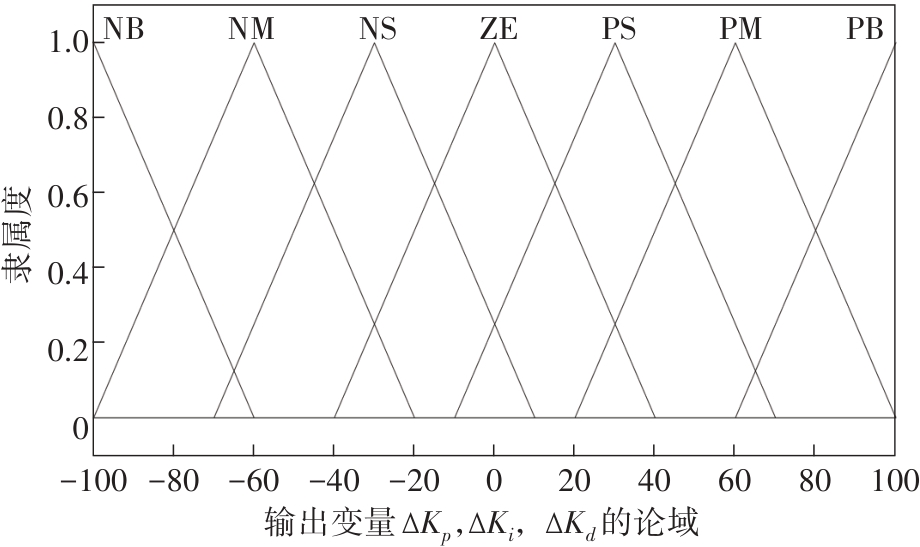
图11 输出变量的隶属度曲线
Fig. 11 Membership curves of the output variable
| 角度误差变化率ec | 角度误差e | ||||||
|---|---|---|---|---|---|---|---|
| NB | NM | NS | ZE | PS | PM | PB | |
| NB | PB | PB | PM | PM | PS | PS | ZE |
| NM | PB | PM | PS | PS | NS | NS | ZE |
| NS | PM | PM | PS | PS | NS | NS | ZE |
| ZE | ZE | ZE | ZE | ZE | ZE | ZE | ZE |
| PS | NS | NS | NS | PS | NS | NM | NB |
| PM | NS | NS | NS | PS | PS | PM | PB |
| PB | PS | PS | NS | PB | PM | PB | PB |
表2 ΔKp的模糊控制规则
Table 2 Fuzzy control rule of ΔKp
| 角度误差变化率ec | 角度误差e | ||||||
|---|---|---|---|---|---|---|---|
| NB | NM | NS | ZE | PS | PM | PB | |
| NB | PB | PB | PM | PM | PS | PS | ZE |
| NM | PB | PM | PS | PS | NS | NS | ZE |
| NS | PM | PM | PS | PS | NS | NS | ZE |
| ZE | ZE | ZE | ZE | ZE | ZE | ZE | ZE |
| PS | NS | NS | NS | PS | NS | NM | NB |
| PM | NS | NS | NS | PS | PS | PM | PB |
| PB | PS | PS | NS | PB | PM | PB | PB |
| 角度误差变化率ec | 角度误差e | ||||||
|---|---|---|---|---|---|---|---|
| NB | NM | NS | ZE | PS | PM | PB | |
| NB | NB | NB | NB | NM | NM | ZE | ZE |
| NM | NB | NM | NS | ZE | PS | PS | PS |
| NS | PS | PS | PS | ZE | ZE | ZE | ZE |
| ZE | ZE | ZE | ZE | ZE | ZE | ZE | ZE |
| PS | PS | PS | PS | ZE | PS | PS | PM |
| PM | NB | NB | ZE | ZE | NS | NS | NS |
| PB | NB | NB | ZE | ZE | NS | NS | NS |
表3 ΔKi的模糊控制规则
Table 3 Fuzzy control rule of ΔKi
| 角度误差变化率ec | 角度误差e | ||||||
|---|---|---|---|---|---|---|---|
| NB | NM | NS | ZE | PS | PM | PB | |
| NB | NB | NB | NB | NM | NM | ZE | ZE |
| NM | NB | NM | NS | ZE | PS | PS | PS |
| NS | PS | PS | PS | ZE | ZE | ZE | ZE |
| ZE | ZE | ZE | ZE | ZE | ZE | ZE | ZE |
| PS | PS | PS | PS | ZE | PS | PS | PM |
| PM | NB | NB | ZE | ZE | NS | NS | NS |
| PB | NB | NB | ZE | ZE | NS | NS | NS |
| 角度误差变化率ec | 角度误差e | ||||||
|---|---|---|---|---|---|---|---|
| NB | NM | NS | ZE | PS | PM | PB | |
| NB | PS | PS | ZE | ZE | ZE | PB | PB |
| NM | NS | NS | NS | ZE | PS | PM | PM |
| NS | PS | PS | PS | ZE | PS | PS | PS |
| ZE | PS | PS | PS | ZE | PS | PS | PS |
| PS | PS | PS | PS | ZE | PS | PS | PS |
| PM | PM | PM | PS | ZE | PS | PM | PM |
| PB | PB | PM | PS | ZE | PS | PM | PB |
表4 ΔKd的模糊控制规则
Table 4 Fuzzy control rule of ΔKd
| 角度误差变化率ec | 角度误差e | ||||||
|---|---|---|---|---|---|---|---|
| NB | NM | NS | ZE | PS | PM | PB | |
| NB | PS | PS | ZE | ZE | ZE | PB | PB |
| NM | NS | NS | NS | ZE | PS | PM | PM |
| NS | PS | PS | PS | ZE | PS | PS | PS |
| ZE | PS | PS | PS | ZE | PS | PS | PS |
| PS | PS | PS | PS | ZE | PS | PS | PS |
| PM | PM | PM | PS | ZE | PS | PM | PM |
| PB | PB | PM | PS | ZE | PS | PM | PB |
| 参数 | 取值 |
|---|---|
| 旋翼直径D/mm | 200 |
| 旋翼旋转关节长度L1/mm | 150 |
| 旋翼摆动关节长度L2/mm | 60 |
| 行走轮半径r1/mm | 30 |
| 行走阻尼c0/(N·s·m-1) | 10 |
| 升降臂原始长度L3/mm | 600 |
| 同侧旋翼安装距离L4/mm | 1 000 |
| 电气箱尺寸/(mm×mm×mm) | 1 100×300×200 |
| 巡检机器人质量m/kg | 30 |
表5 仿真中巡检机器人参数
Table 5 Parameters of the inspection robot in simulation
| 参数 | 取值 |
|---|---|
| 旋翼直径D/mm | 200 |
| 旋翼旋转关节长度L1/mm | 150 |
| 旋翼摆动关节长度L2/mm | 60 |
| 行走轮半径r1/mm | 30 |
| 行走阻尼c0/(N·s·m-1) | 10 |
| 升降臂原始长度L3/mm | 600 |
| 同侧旋翼安装距离L4/mm | 1 000 |
| 电气箱尺寸/(mm×mm×mm) | 1 100×300×200 |
| 巡检机器人质量m/kg | 30 |
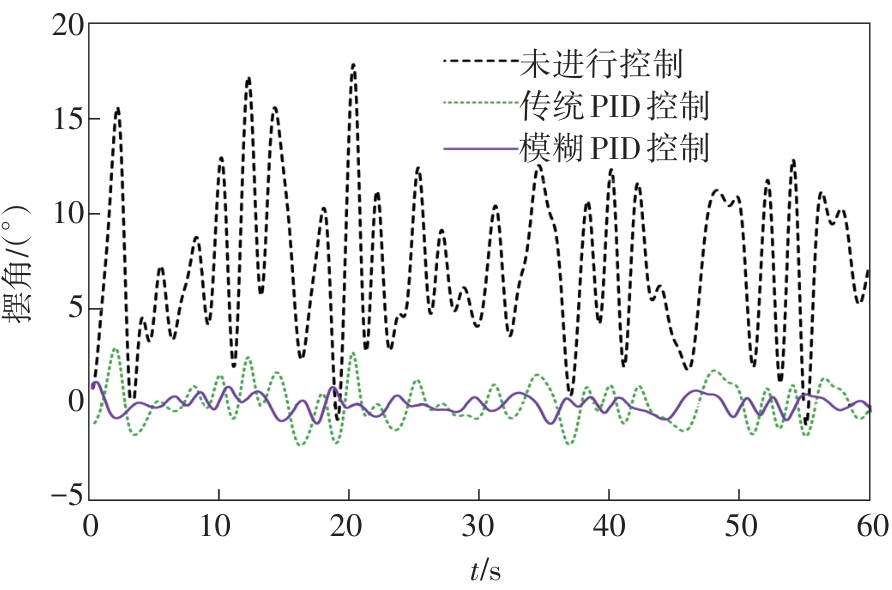
图12 巡检机器人摆角
Fig. 12 Swing angle of the inspection robot
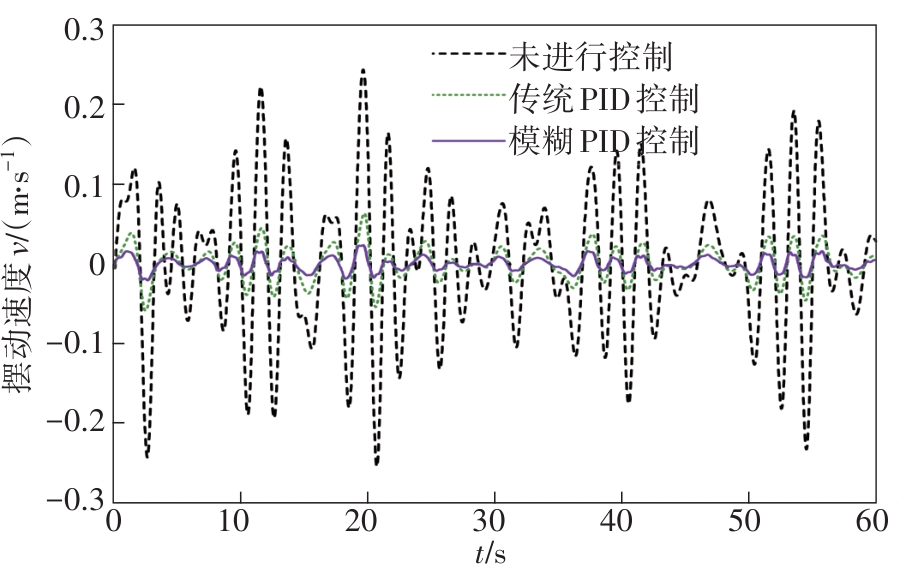
图13 巡检机器人摆动速度
Fig. 13 Swing speed of the inspection robot
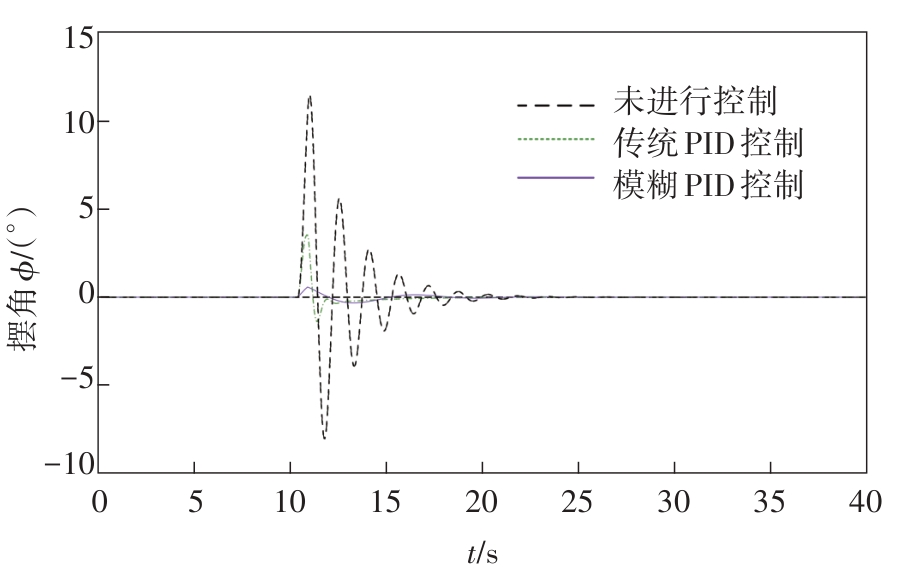
图14 施加干扰信号时机器人的摆角变化
Fig. 14 Swing angle change of the robot under interference
| 样机参数 | 数值 |
|---|---|
| 3D打印材料 | 未来8200树脂 |
| 行走电机额定电压/V | 12 |
| 额定转速/(r·min-1) | 15 |
| 额定转矩/(N·mm) | 20 |
| 样机滑动速度/(mm·s-1) | 16 |
| 旋翼直径/mm | 205 |
| 升降机构原始长度/mm | 150 |
| 最大伸长长度/mm | 300 |
| 旋翼电机额定电压/V | 12 |
| 空载转速/(r·min-1) | 33 600 |
| 电气箱尺寸/(mm×mm×mm) | 300×150×120 |
| 样机高度/mm | 380 |
表6 样机参数
Table 6 Prototype parameters
| 样机参数 | 数值 |
|---|---|
| 3D打印材料 | 未来8200树脂 |
| 行走电机额定电压/V | 12 |
| 额定转速/(r·min-1) | 15 |
| 额定转矩/(N·mm) | 20 |
| 样机滑动速度/(mm·s-1) | 16 |
| 旋翼直径/mm | 205 |
| 升降机构原始长度/mm | 150 |
| 最大伸长长度/mm | 300 |
| 旋翼电机额定电压/V | 12 |
| 空载转速/(r·min-1) | 33 600 |
| 电气箱尺寸/(mm×mm×mm) | 300×150×120 |
| 样机高度/mm | 380 |
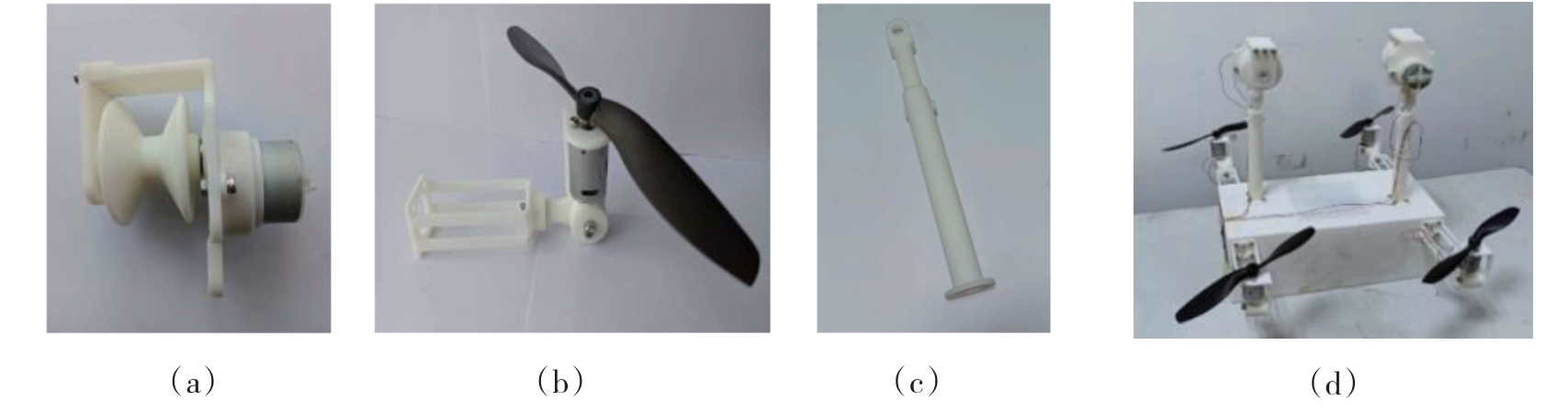
图15 旋翼巡检机器人样机(a)—行走机构;(b)—旋翼系统;(c)—升降机构;(d)—巡检机器人样机.
Fig. 15 Prototype of the inspection robot with rotors
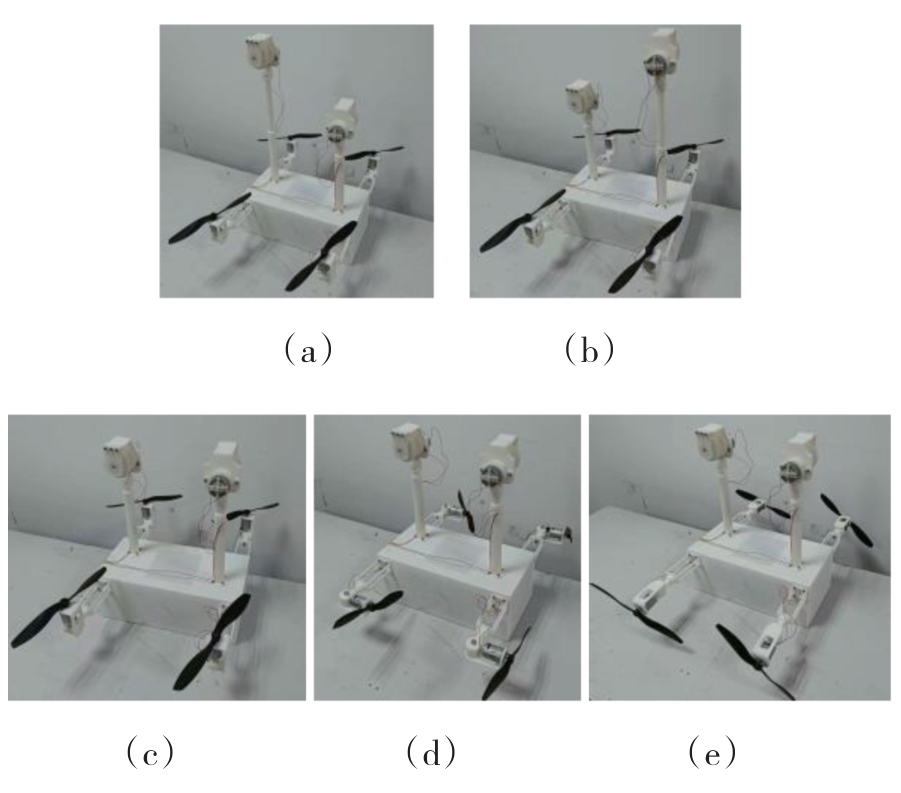
图16 机器人样机的位姿(a)—前臂伸长;(b)—后臂伸长;(c)—旋翼向上;(d)—旋翼向侧;(e)—旋翼向前.
Fig. 16 Pose of the robot prototype

图17 抑制摆动实验(a)—风载荷作用下的自然摆动;(b)—旋翼系统工作抑制摆动.
Fig. 17 Swing suppression experiment
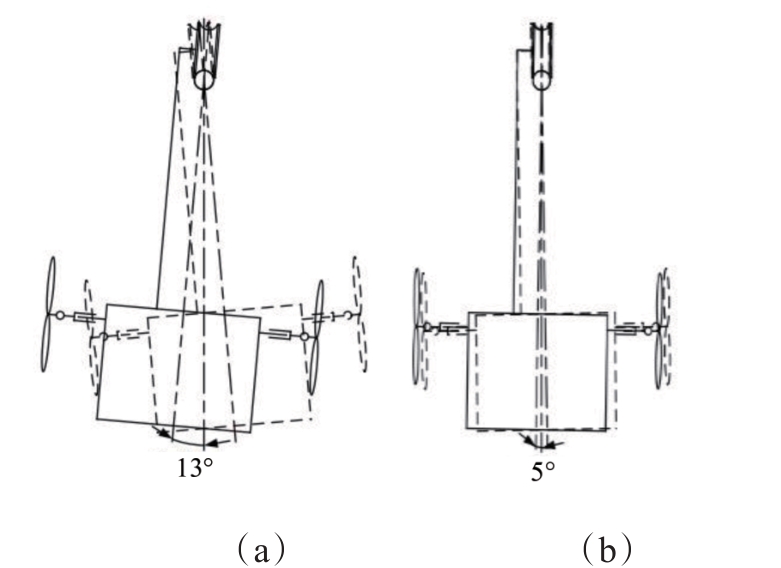
图18 摆动实验结果(a)—无旋翼系统;(b)—有旋翼系统.
Fig. 18 Swing experiment results
| 1 | Yang L, Fan J F, Liu Y H,et al. A review on state-of-the-art power line inspection techniques[J]. IEEE Transactions on Instrumentation and Measurement,2020,69(12): 9350-9365. |
| 2 | Montambault S, Pouliot N. About the future of power line robotics[C]// International Conference on Applied Robotics for the Power Industry. Montreal: IEEE,2010: 1-6. |
| 3 | 洪展,吴功平,王伟,等. 风载荷下巡检机器人姿态检测与作业优化[J]. 机械设计与制造,2016(12): 197-200. |
| Hong Zhan, Wu Gong-ping, Wang Wei,et al. Attitude detection and operation optimization of inspection robot under wind load[J]. Machinery Design & Manufacture,2016(12): 197-200. | |
| 4 | 孙翠莲,赵明扬,王洪光. 风荷载下越障巡检机器人结构参数优化[J]. 机械工程学报,2010,46(7): 16-21. |
| Sun Cui-lian, Zhao Ming-yang, Wang Hong-guang. Structural parameters optimization of a navigating inspection robot under the wind load[J]. Journal of Mechanical Engineering,2010,46(7): 16-21. | |
| 5 | Guo J, Zhang X D, Shen H M,et al. Research on wind load characteristics of bionic crawling inspection robot[C]// International Conference on Real-Time Computing and Robotics (RCAR). Irkutsk:IEEE,2019: 385-390. |
| 6 | Qin X Y, Jia B, Lei J,et al. A novel flying-walking power line inspection robot and stability analysis hanging on the line under wind loads[J]. Mechanical Sciences,2022,13(1): 257-273. |
| 7 | Jiang W, Yan Y, Li Q M,et al. Research on robust stabilization control of high-voltage power maintenance robot under wind load action[J]. Industrial Robot: The International Journal of Robotics Research and Application,2019,46(6): 870-881. |
| 8 | Dian S Y, Wen X F, Dong H,et al. Development of a self-balance dual-arm robot for inspection of high-voltage power transmission lines[C]// International Conference on Mechatronics and Automation. Chengdu: IEEE, 2012: 2482-2487. |
| 9 | Wang W J, He T, Wang H S,et al. Balance control of a novel power transmission line inspection robot[C]// International Conference on Robotics and Biomimetics (ROBIO). Zhuhai: IEEE, 2015: 1882-1887. |
| 10 | Wang Y G, Yu H D, Xu J K. Design and simulation on inspection robot for high-voltage transmission lines[J]. Applied Mechanics and Materials,2014,615: 173-180. |
| 11 | Zhao T, Chen Y, Dian S Y,et al. General type-2 fuzzy gain scheduling PID controller with application to power-line inspection robots[J]. International Journal of Fuzzy Systems,2020,22(1): 181-200. |
| 12 | Pussente G A N, de Aguiar E P, Marcato A L M,et al. UAV power line tracking control based on a type-2 fuzzy-PID approach[J]. Robotics,2023,12(2): 60. |
| 13 | Raafi’u B, Darwito P A, Adziimaa A F,et al. Comparative study of fuzzy-PID and fuzzy-PI control systems on DC motor speed for four-wheeled mobile robotic[C]// International Conference on Advanced Mechatronics,Intelligent Manufacture and Industrial Automation (ICAMIMIA). Batu: IEEE, 2019: 129-133. |
| 14 | Wang T T, Wang H Z, Hu H S,et al. An adaptive fuzzy PID controller for speed control of brushless direct current motor[J]. SN Applied Sciences,2022,4(3): 71. |
| 15 | Bhimte R, Bhole-Ingale K, Shah P,et al. Precise position control of quanser servomotor using fractional order fuzzy PID controller[C]//IEEE Bombay Section Signature Conference (IBSSC). Mumbai: IEEE, 2020: 58-63. |
| 16 | 刘沛清. 空气螺旋桨理论及其应用[M]. 北京: 北京航空航天大学出版社,2006: 20-45. |
| Liu Pei-qing. Air propeller theory and its application[M]. Beijing: Beijing University of Aeronautics & Astronautics Press,2006: 20-45. | |
| 17 | 龚伟俊,李为相,张广明. 基于威布尔分布的风速概率分布参数估计方法[J]. 可再生能源,2011,29(6): 20-23. |
| Gong Wei-jun, Li Wei-xiang, Zhang Guang-ming. The estimation algorithm on the probabilistic distribution parameters of wind speed based on Weibull distribution[J]. Renewable Energy Resources,2011,29(6): 20-23. | |
| 18 | 张猛. 输电线路巡检机器人旋翼系统的机构设计及性能分析[D]. 沈阳: 东北大学,2021. |
| Zhang Meng. Mechanism design and performance analysis of rotor system of transmission line inspection robot[D]. Shenyang: Northeastern University,2021. |
| [1] | 李小彭, 李凯, 樊星, 张凌越. 双臂巡检机器人位姿变化下沿悬链线行走能力分析[J]. 东北大学学报(自然科学版), 2022, 43(6): 872-880. |
| [2] | 李小彭, 樊星, 李凯, 张凌越. 考虑负载时变的线路巡检机器人动态性能分析[J]. 东北大学学报(自然科学版), 2022, 43(5): 660-667. |
| [3] | 李小彭, 尚东阳, 李凡杰, 曹伟龙. 输电线巡检机器人动力学建模与DME评价[J]. 东北大学学报:自然科学版, 2020, 41(9): 1280-1284. |
| [4] | 李小彭, 尚东阳, 李凡杰, 闻邦椿. 输电线巡检机器人位姿变化的柔性关节控制策略[J]. 东北大学学报:自然科学版, 2020, 41(11): 1577-1583. |
| [5] | 房立金, 祝帅, 贺长林, 许继谦. 新型四臂巡检机器人结构设计及转向越障研究[J]. 东北大学学报:自然科学版, 2019, 40(6): 825-830. |
| [6] | 房立金, 贺长林, 祝帅, 陶广宏. 串联多臂式巡检机器人控制策略及轨迹规划方法[J]. 东北大学学报:自然科学版, 2019, 40(5): 734-739. |
| [7] | 刘云山, 贾磊, 闻邦椿. 反向回转双机驱动振动系统的倍频控制同步[J]. 东北大学学报:自然科学版, 2019, 40(12): 1726-1731. |
| [8] | 魏永乐, 房立金, 陶广宏. 双臂巡检机器人越障能力分析[J]. 东北大学学报:自然科学版, 2017, 38(9): 1293-1297. |
| [9] | 张秀芝, 贾全, 尚涛, 袁瑞强. 高速水稻插秧机仿形系统控制方法[J]. 东北大学学报:自然科学版, 2016, 37(9): 1288-1292. |
| [10] | 房立金,陶广宏. 新型多单元串联巡检机器人机构研究与设计[J]. 东北大学学报:自然科学版, 2014, 35(8): 1173-1177. |
| [11] | 李振垒;李海军;王昭东;王国栋;. 热轧板带钢的超快速冷却控制系统[J]. 东北大学学报(自然科学版), 2012, 33(10): 1436-1439+1452. |
| [12] | 杨克石;刘杰;谷雨明;韩鹰;. 挖掘机工作装置电液控制系统的抗干扰特性[J]. 东北大学学报(自然科学版), 2010, 31(5): 713-716. |
| [13] | 高淑芝;高宪文;朱志承;. 基于变论域模糊PID的汽提塔温度控制方法[J]. 东北大学学报(自然科学版), 2010, 31(10): 1369-1372. |
| [14] | 李丽娜;柳洪义;罗忠;孙一兰;. 模糊PID复合控制算法改进及应用[J]. 东北大学学报(自然科学版), 2009, 30(2): 274-278. |
| [15] | 王丹;李鑫;王晓光;李明;. 基因型扩增仪的温度控制系统[J]. 东北大学学报(自然科学版), 2008, 29(4): 569-572. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||