东北大学学报(自然科学版) ›› 2024, Vol. 45 ›› Issue (8): 1107-1114.DOI: 10.12068/j.issn.1005-3026.2024.08.006
赵英博1, 修世超1, 洪远1, 步新宇2
Ying-bo ZHAO1, Shi-chao XIU1, Yuan HONG1, Xin-yu BU2
摘要:
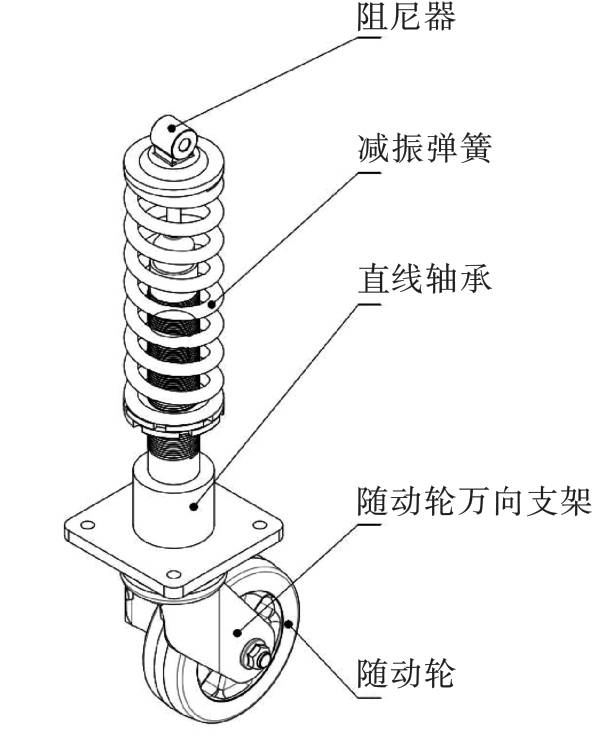
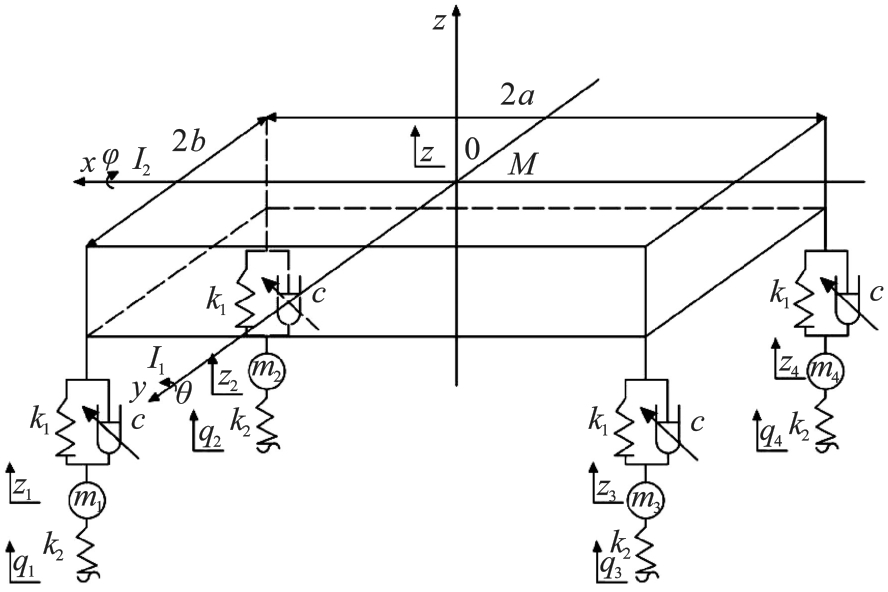
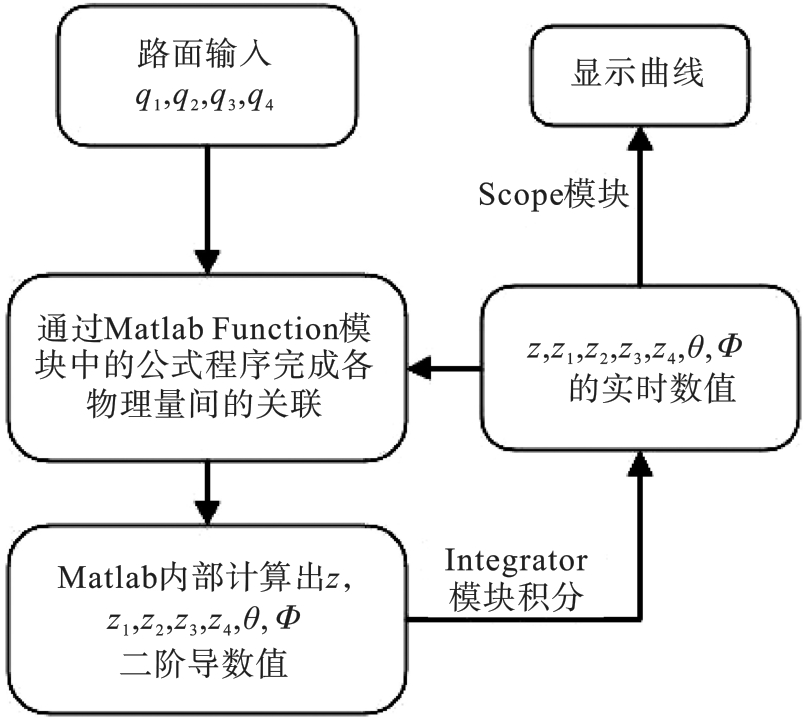
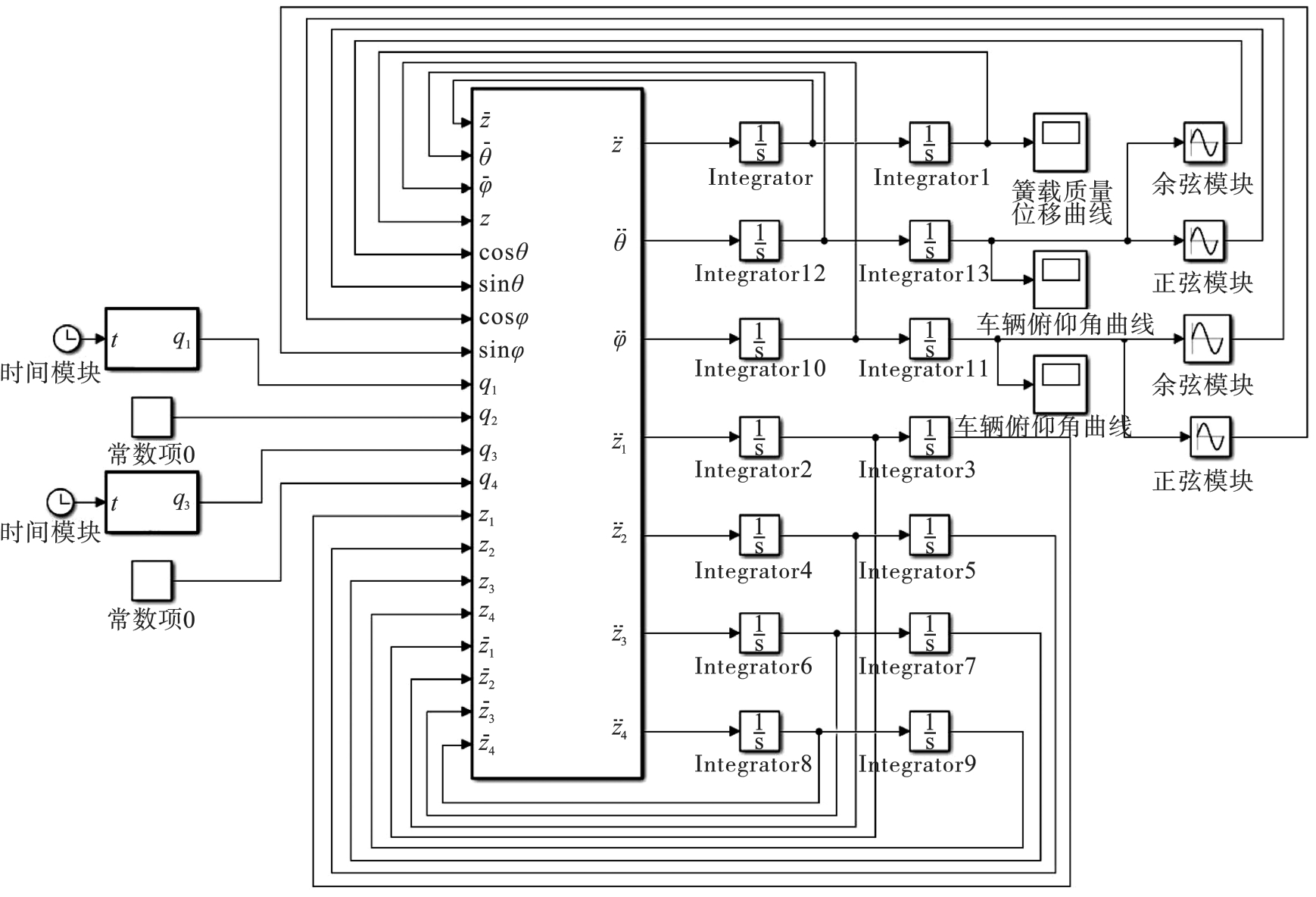
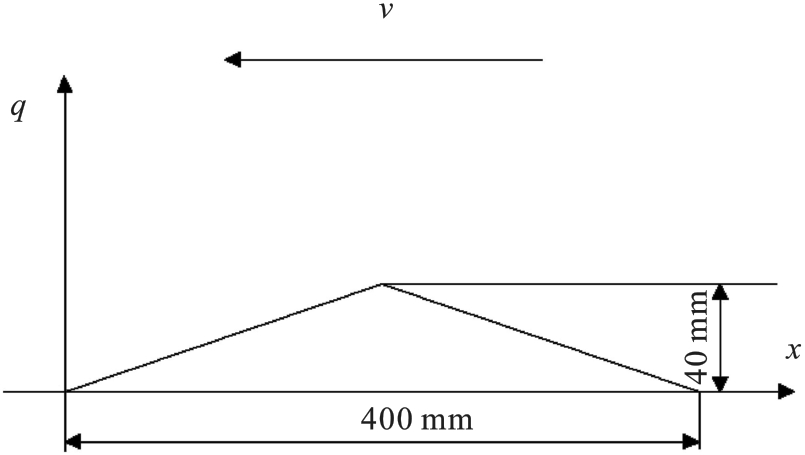
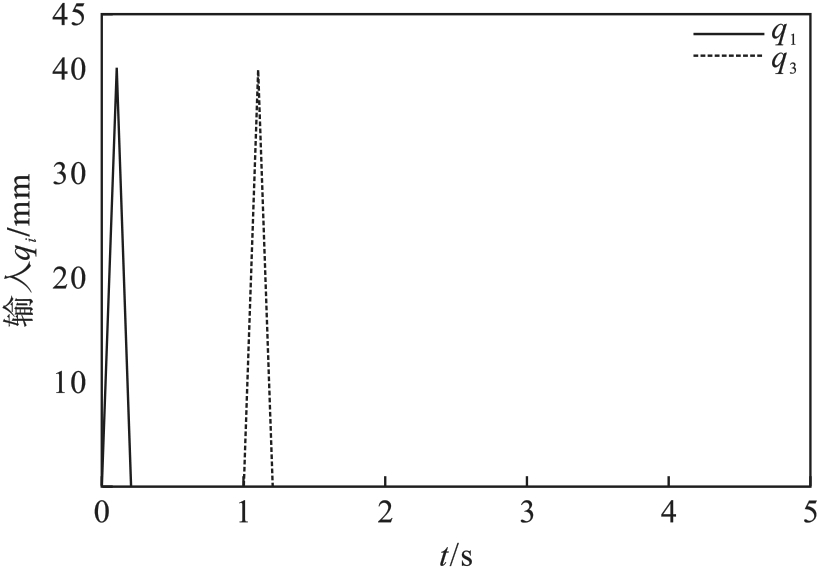
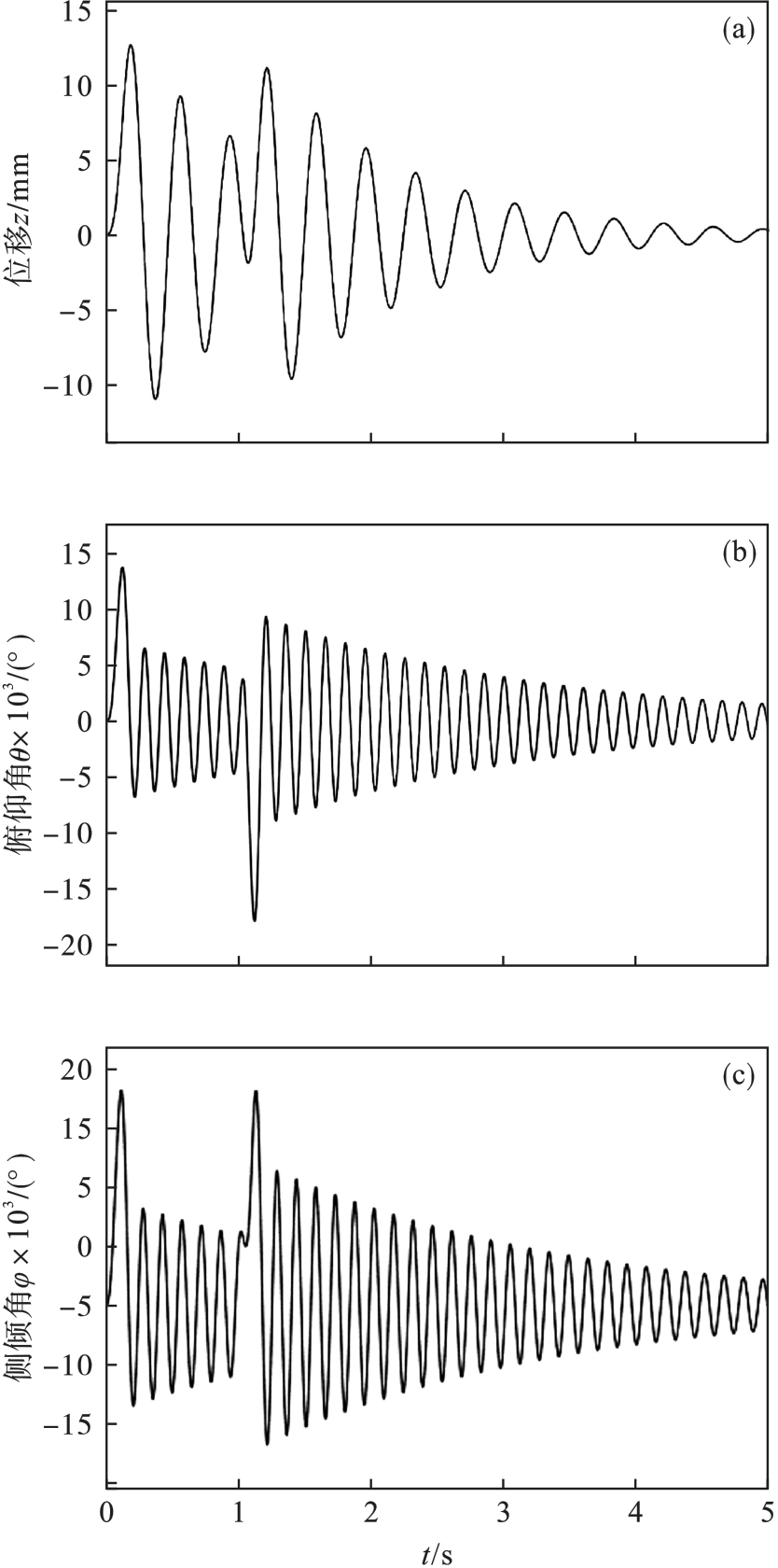
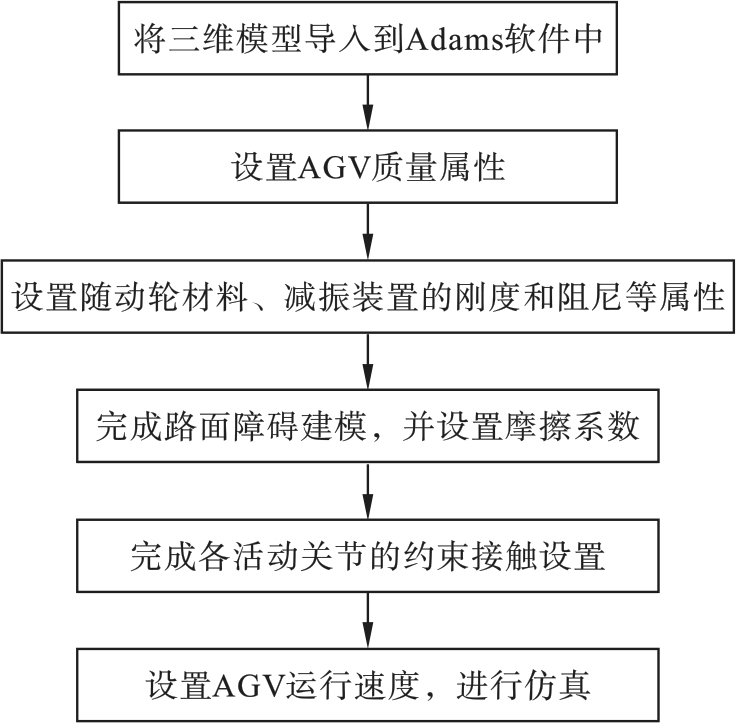
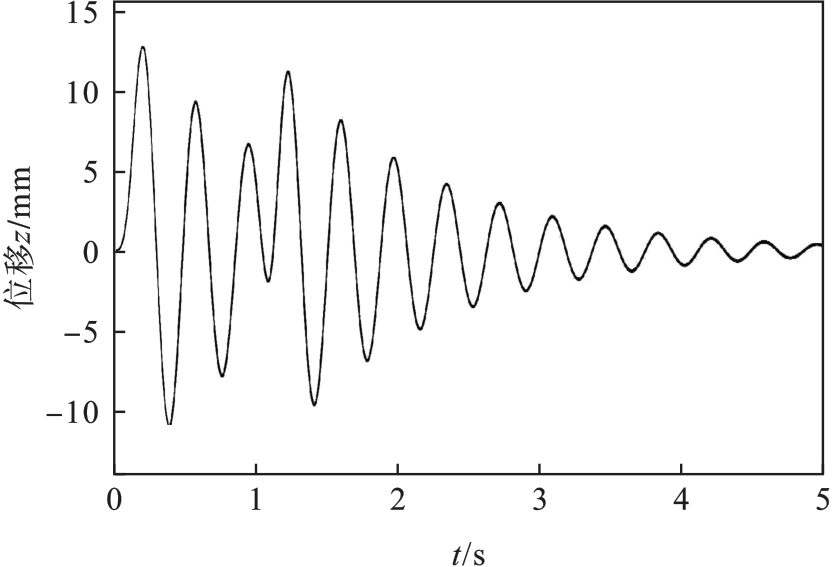
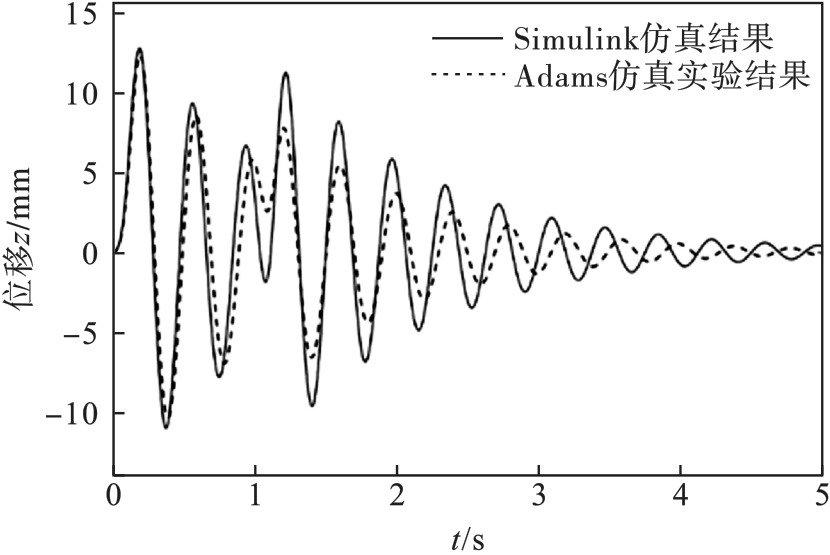
针对改善户外型自动导引车(AGV)的避振性和通过性的技术发展需求,提出并设计了一款户外型AGV的随动轮避振系统,并以此为研究对象,根据车辆悬架动力学理论,为其构建了7自由度动力学模型以及各方向运动的微分方程.并基于Simulink软件环境建立了仿真模型.在此基础上,以三角波输入为路面激励,对评价AGV稳定性的3个指标进行仿真分析.对AGV的越障通过性进行了实验,同时进行了AGV越障仿真方法效率对比实验,实验结果表明,AGV簧载质量最大位移均值为13.42 mm,本文建立的仿真模型的预测误差为4.6%,小于传统Adams软件的仿真预测误差.使用本文设计的基于Simulink的越障仿真方法比传统的Adams仿真方法节省了设计人员约28%的工作时间.
中图分类号: