Journal of Northeastern University(Natural Science) ›› 2024, Vol. 45 ›› Issue (9): 1258-1267.DOI: 10.12068/j.issn.1005-3026.2024.09.006
• Mechanical Engineering • Previous Articles
Xiao-peng LI1( ), Jia-xing FU1, Hai-long LIU1, Meng YIN2
), Jia-xing FU1, Hai-long LIU1, Meng YIN2
Received:2023-05-05
Online:2024-09-15
Published:2024-12-16
Contact:
Xiao-peng LI
About author:LI Xiao-peng,E-mail:xpli@me.neu.edu.CLC Number:
Xiao-peng LI, Jia-xing FU, Hai-long LIU, Meng YIN. RBF Neural Network Compensation Sliding Mode Control Strategy for Flexible Space Manipulators[J]. Journal of Northeastern University(Natural Science), 2024, 45(9): 1258-1267.
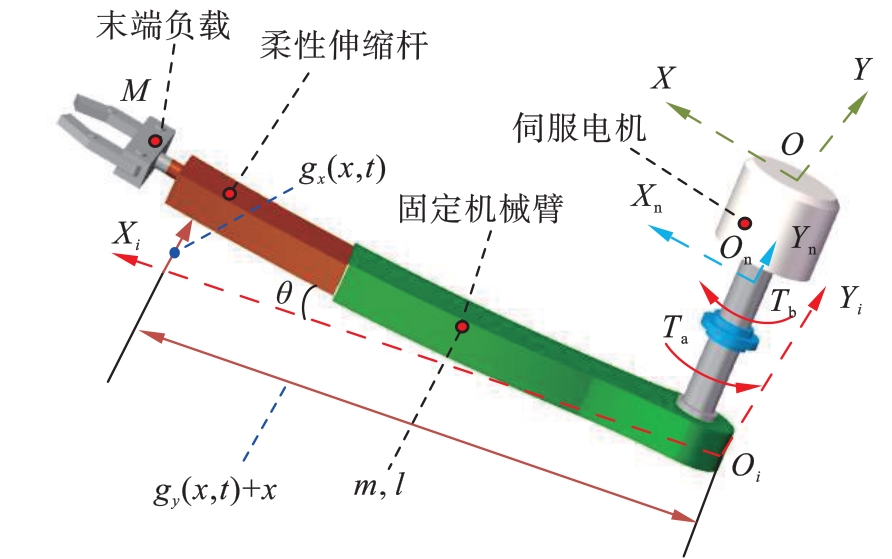
Fig.1 Equivalent physical model diagram of the flexible space manipulator
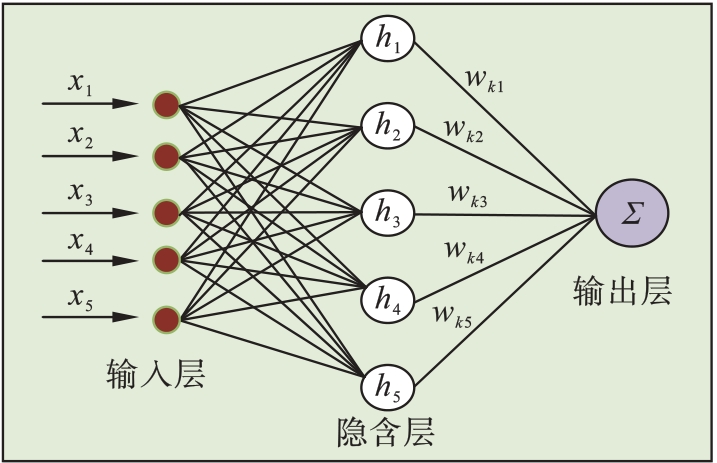
Fig.2 RBF neural network structure
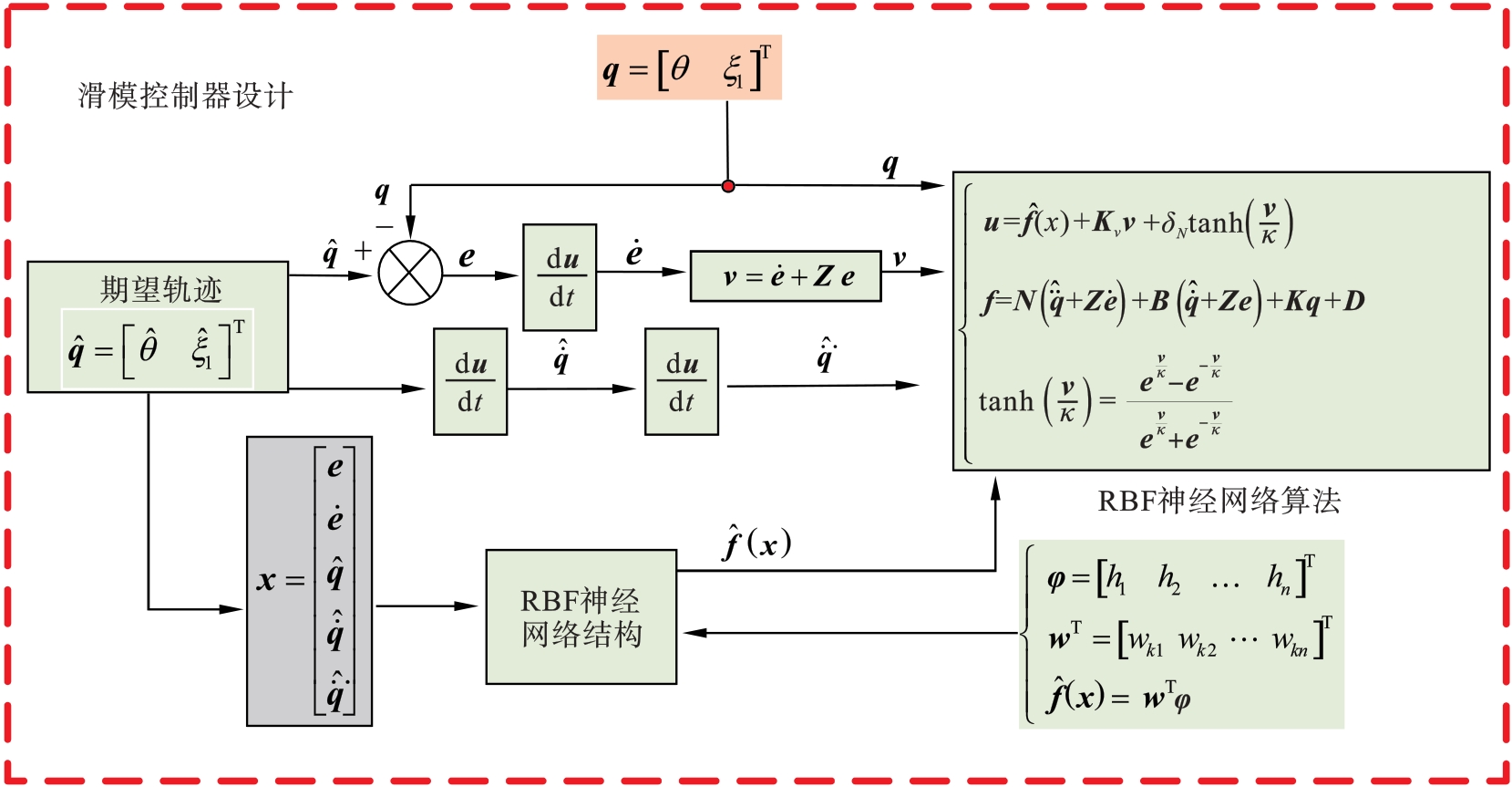
Fig.3 Control block diagram of the flexible space manipulator using RBF neural network compensation control strategy
| 参数 | 值 |
|---|---|
| 柔性连杆长度l /m | 2.5 |
| 柔性连杆质量m /kg | 3 |
| 末端负载M /kg | 1 |
| 弯曲刚度σ/(N·m2) | 100 |
| 控制器参数 Z | 51 |
| 控制器参数 γ | diag[6,6] |
| 控制器系数κ | 0.01 |
| 控制器参数 Kv | 151 |
| 控制器参数δN | 12 |
Table 1 Parameters of the flexible space manipulator
| 参数 | 值 |
|---|---|
| 柔性连杆长度l /m | 2.5 |
| 柔性连杆质量m /kg | 3 |
| 末端负载M /kg | 1 |
| 弯曲刚度σ/(N·m2) | 100 |
| 控制器参数 Z | 51 |
| 控制器参数 γ | diag[6,6] |
| 控制器系数κ | 0.01 |
| 控制器参数 Kv | 151 |
| 控制器参数δN | 12 |
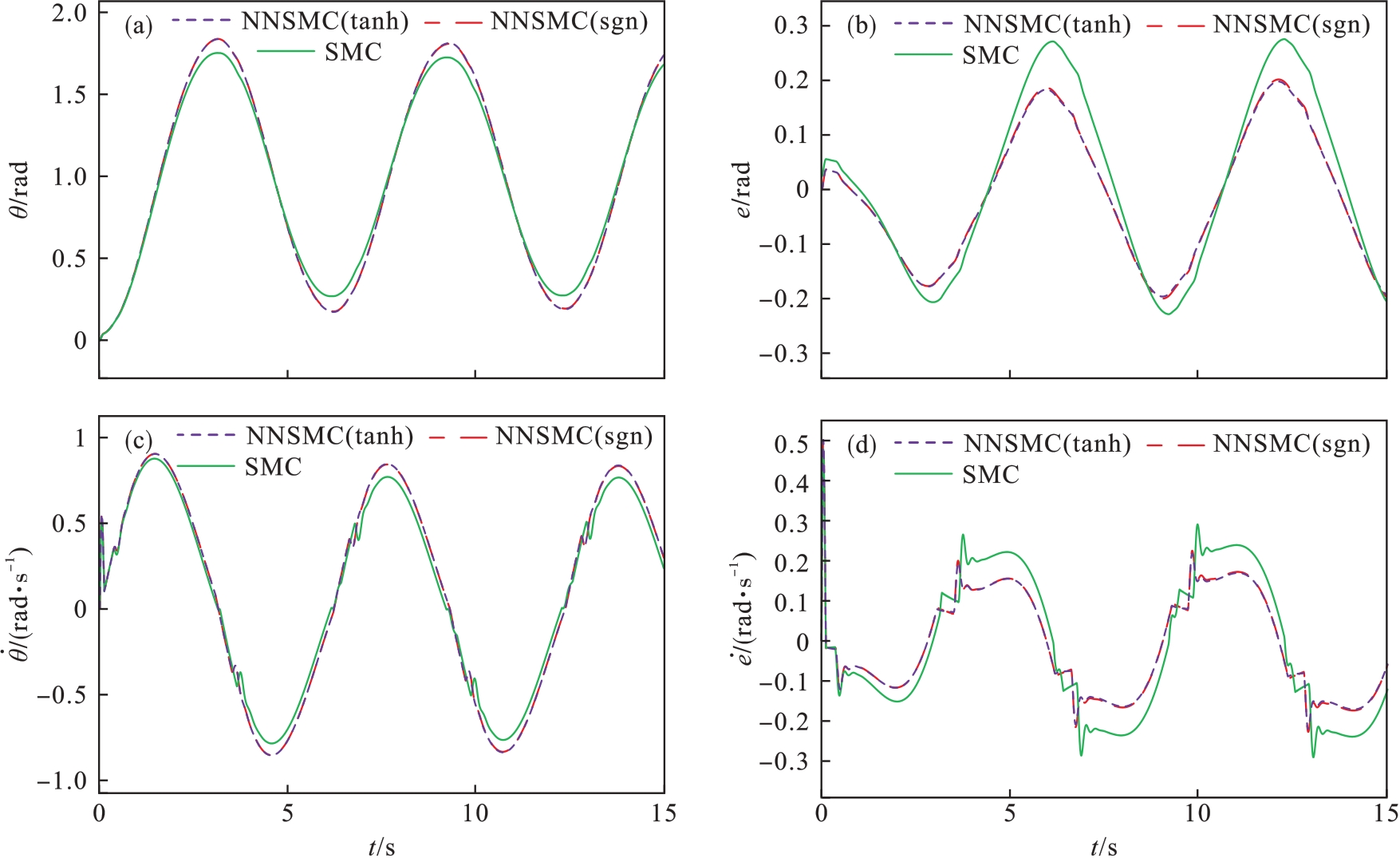
Fig.4 Rotating simulation results of the flexible space manipulator under different strategies
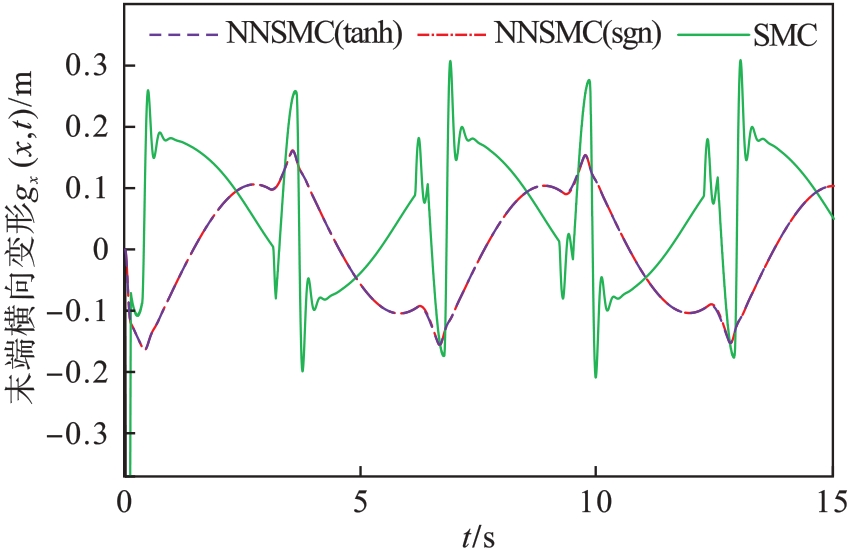
Fig.5 Deformation simulation results of the flexible space manipulator
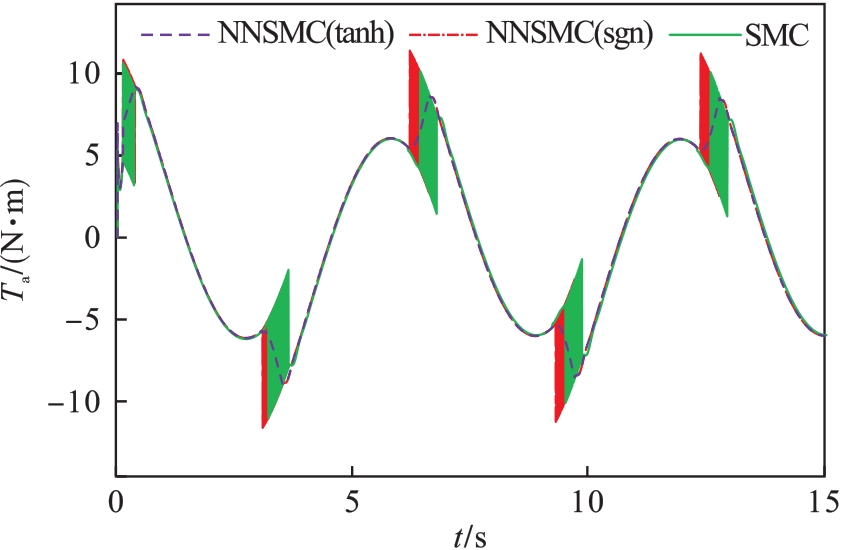
Fig.6 Simulation results of input torque of the flexible space manipulator
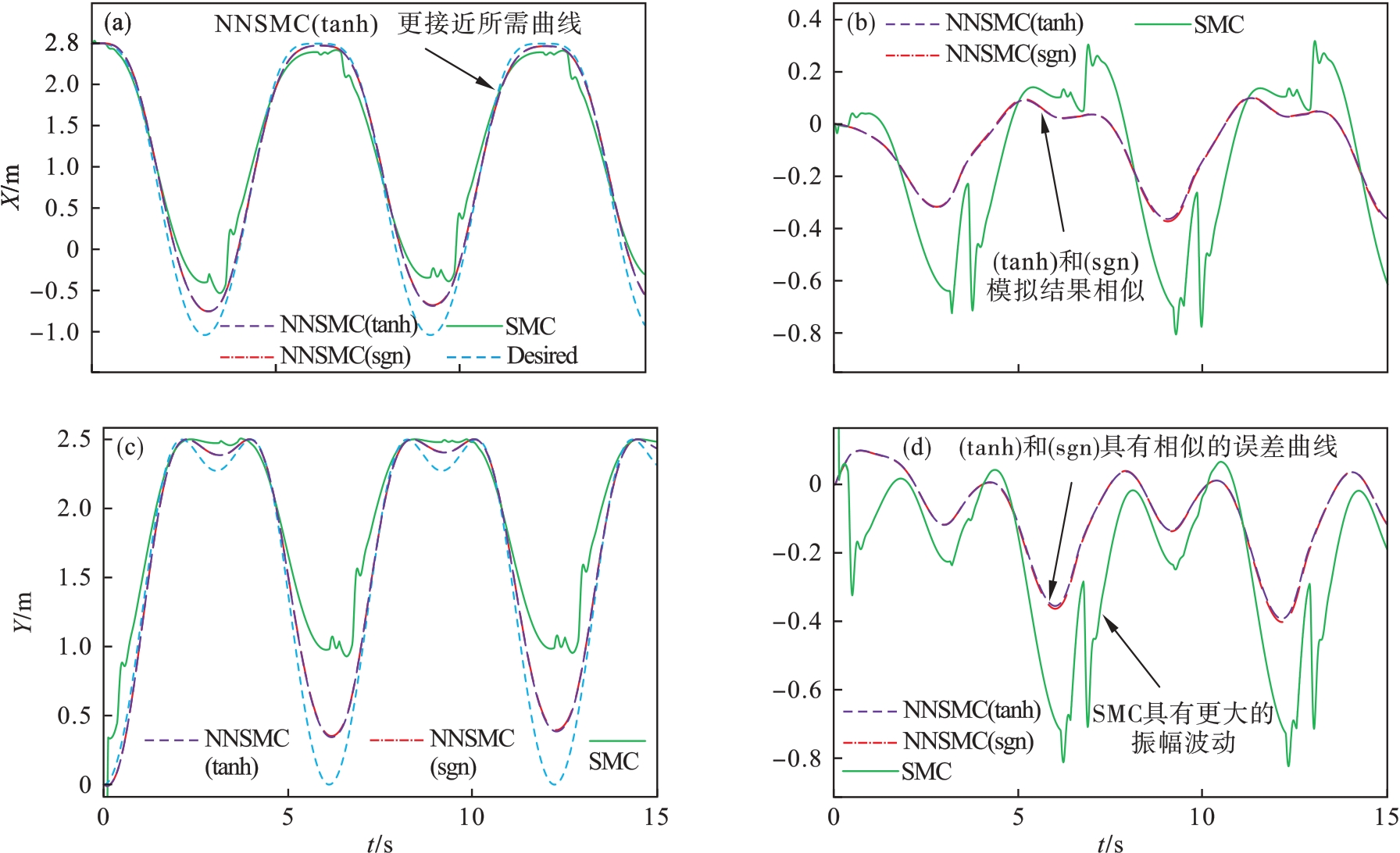
Fig.7 Trajectory simulation results of the flexible space manipulator
| 参数 | 值 |
|---|---|
| 柔性空间机械臂长度l/m | 0.6 |
| 尖端有效载荷M/kg | 0.8 |
| 柔性空间机械臂质量m/kg | 2.5 |
| 柔性空间机械臂线密度ρ/(kg·m-1) | 4.17 |
| 柔性空间机械臂厚度H/mm | 2 |
| 柔性空间机械臂弹性模量E/GPa | 70 |
| 柔性空间机械臂宽度W/mm | 200 |
Table 2 Parameters of the ground control
| 参数 | 值 |
|---|---|
| 柔性空间机械臂长度l/m | 0.6 |
| 尖端有效载荷M/kg | 0.8 |
| 柔性空间机械臂质量m/kg | 2.5 |
| 柔性空间机械臂线密度ρ/(kg·m-1) | 4.17 |
| 柔性空间机械臂厚度H/mm | 2 |
| 柔性空间机械臂弹性模量E/GPa | 70 |
| 柔性空间机械臂宽度W/mm | 200 |

Fig.8 Experimental results of the ground control experiment platform for the flexible space manipulator
| 评价指标 | NNSMC(tanh) | NNSMC(sgn) | SMC |
|---|---|---|---|
| 平均绝对误差/rad | 0.198 | 0.209 | 0.276 |
| 标准误差 | 0.219 | 0.234 | 0.254 |
| 平均加速度/(m·s-2) | 0.069 | 0.076 | 0.104 |
| 加速度标准差 | 0.067 | 0.088 | 0.096 |
Table 3 Evaluation indexes of different control strategies
| 评价指标 | NNSMC(tanh) | NNSMC(sgn) | SMC |
|---|---|---|---|
| 平均绝对误差/rad | 0.198 | 0.209 | 0.276 |
| 标准误差 | 0.219 | 0.234 | 0.254 |
| 平均加速度/(m·s-2) | 0.069 | 0.076 | 0.104 |
| 加速度标准差 | 0.067 | 0.088 | 0.096 |
| 1 | Gasbarri P, Pisculli A.Dynamic/control interactions between flexible orbiting space‑robot during grasping,docking and post‑docking manoeuvres[J].Acta Astronautica,2015,110:225-238. |
| 2 | Zhao J D, Zhao Z Y, Yang X H,et al.Inverse kinematics and workspace analysis of a novel SSRMS-type reconfigurable space manipulator with two lockable passive telescopic links[J].Mechanism and Machine Theory,2023,180:105152. |
| 3 | Shang D Y, Li X P, Yin M,et al.Dynamic modeling and fuzzy adaptive control strategy for space flexible robotic arm considering joint flexibility based on improved sliding mode controller[J].Advances in Space Research,2022,70(11):3520-3539. |
| 4 | Zhang D G.Recursive Lagrangian dynamic modeling and simulation of multi‑link spatial flexible manipulator arms[J].Applied Mathematics and Mechanics,2009,30(10):1283-1294. |
| 5 | Korayem M H, Heidari A, Nikoobin A.Maximum allowable dynamic load of flexible mobile manipulators using finite element approach[J].The International Journal of Advanced Manufacturing Technology,2009,45(11):1232. |
| 6 | Nair A P, Selvaganesan N, Lalithambika V R.Lyapunov based PD/PID in model reference adaptive control for satellite launch vehicle systems[J].Aerospace Science and Technology,2016,51:70-77. |
| 7 | Chen S, Xue W C, Zhong S,et al.On comparison of modified ADRCs for nonlinear uncertain systems with time delay[J].Science China (Information Sciences),2018,61(7):70223. |
| 8 | Yang Z J, Fukushima Y, Qin P.Decentralized adaptive robust control of robot manipulators using disturbance observers[J].IEEE Transactions on Control Systems Technology,2012,20(5):1357-1365. |
| 9 | Dong C Y, Liu C, Wang Q,et al.Switched adaptive active disturbance rejection control of variable structure near space vehicles based on adaptive dynamic programming[J].Chinese Journal of Aeronautics,2019,32(7):1684-1694. |
| 10 | Qiao J Z, Wu H, Yu X.High‑precision attitude tracking control of space manipulator system under multiple disturbances[J].IEEE Transactions on Systems,Man,and Cybernetics:Systems,2021,51(7):4274-4284. |
| 11 | 王宏,郑天奇.基于滑模补偿的六轴机械臂RBF网络自适应控制[J].东北大学学报(自然科学版),2017,38(11):1601-1606. |
| Wang Hong, Zheng Tian‑qi.RBF network adaptive control based on SMC compensation for six‑axis manipulator[J].Journal of Northeastern University(Natural Science),2017,38(11):1601-1606. | |
| 12 | 曾晨东,艾海平,陈力.空间机械臂在轨插、拔孔操作力/位姿阻抗控制[J].机械工程学报,2022,58(3):84-94. |
| Zeng Chen‑dong, Ai Hai‑ping, Chen Li.Operation force/pose impedance control of space manipulator in orbit[J].Chinese Journal of Mechanical Engineering,2022,58(3):84-94. | |
| 13 | 吴昊,毛新涛,刘鹭航,等.柔性关节空间机械臂的自适应滑模控制[J].宇航学报,2019,40(6):703-710. |
| Wu Hao, Mao Xin‑tao, Liu Lu‑hang,et al.Adaptive sliding mode control for flexible joint space mechanical arms[J].Journal of Astronautics,2019,40(6):703-710. | |
| 14 | Yin X M, Wang B, Liu L,et al.Disturbance observer‑based gain adaptation high‑order sliding mode control of hypersonic vehicles[J].Aerospace Science and Technology,2019,89:19-30. |
| 15 | Yao Q J.Adaptive trajectory tracking control of a free‑flying space manipulator with guaranteed prescribed performance and actuator saturation[J].Acta Astronautica,2021,185:283-298. |
| 16 | 张建宇,高天宇,于潇雁,等.基于自适应时延估计的空间机械臂连续非奇异终端滑模控制[J].机械工程学报,2021,57(11):177-183. |
| Zhang Jian‑yu, Gao Tian‑yu, Yu Xiao‑yan,et al.Continuous non‑singular terminal sliding mode control of space manipulator based on adaptive time delay estimation[J].Journal of Mechanical Engineering,2021,57(11):177-183. | |
| 17 | Wu S X, Chen L, Zhang D X,et al.Disturbance observer‑based fixed time sliding mode control for spacecraft proximity operations with coupled dynamics[J].Advances in Space Research,2020,66(9):2179-2193. |
| 18 | Jia S Y, Shan J J.Finite‑time trajectory tracking control of space manipulator under actuator saturation[J].IEEE Transactions on Industrial Electronics,2020,67(3):2086-2096. |
| 19 | Johanastrom K, de Canudas W C.Revisiting the LuGre friction model[J].IEEE Control Systems Magazine,2008,28(6):101-114. |
| 20 | Shang D Y, Li X P, Yin M,et al.Tracking control strategy for space flexible manipulator considering nonlinear friction torque based on adaptive fuzzy compensation sliding mode controller[J].Advances in Space Research,2023,71(9):3661-3680. |
| 21 | Gu H C, Song G B, Malki H.Chattering‑free fuzzy adaptive robust sliding‑mode vibration control of a smart flexible beam[J].Smart Materials and Structures,2008,17(3):035007. |
| 22 | Shang D Y, Li X P, Yin M,et al.Vibration suppression for two‑inertia system with variable‑length flexible load based on neural network compensation sliding mode controller and angle‑independent method[J].IEEE/ASME Transactions on Mechatronics,2023,28(2):848-859. |
| 23 | 尚东阳,李小彭,尹猛,等.采用RBF神经网络辨识的柔性机械臂抑振控制策略[J].西安交通大学学报,2022,56(6):76-84. |
| Shang Dong‑yang, Li Xiao‑peng, Yin Meng,et al.Vibration suppression control strategy of flexible manipulator based on RBF neural network identification[J].Journal of Xi'an Jiaotong University,2022,56(6):76-84. |
| [1] | Dong-mei YANG, Ling-xiu DU, Chun-xia ZHU. H∞ Sliding Mode Control for Nonlinear Generalized Time-delay Markov Jump Systems [J]. Journal of Northeastern University(Natural Science), 2024, 45(2): 153-159. |
| [2] | ZHANG Chun-lei, LI He, DONG Mao-lin, ZHANG Sheng-jie. Adaptive Neural Network Sliding Mode Control for the Fuel Cell Air Supply System [J]. Journal of Northeastern University(Natural Science), 2022, 43(9): 1270-1276. |
| [3] | HU Jiao, HU Niao-qing, SHEN Jian, LUO Peng. Fault Dynamic Modeling and Simulation for Typical Components of Helicopter Main Reducers [J]. Journal of Northeastern University(Natural Science), 2022, 43(12): 1732-1740. |
| [4] | LI Xi-xiao, YANG Dong-mei. Design and Simulation of Sliding Mode Controllers for Fractional-Order Singular Systems with Uncertainties [J]. Journal of Northeastern University(Natural Science), 2022, 43(11): 1521-1528. |
| [5] | LU Zhi-guo, WANG Shi-xiong, LIN Meng-lei. Study on Decoupling Sliding Mode Control with RBF Network for the Interference Compensation of Seesaw System [J]. Journal of Northeastern University(Natural Science), 2021, 42(5): 679-686. |
| [6] | JING Yuan-wei, BAI Yun. Sliding Mode Control of TCP Network Based on Event-Triggered [J]. Journal of Northeastern University(Natural Science), 2021, 42(4): 457-462. |
| [7] | WANG Da-zhi, GAO Ming, LI Zhao. Double Integral Indirect Sliding Mode Control for Phase-Shifted Full-Bridge Converters [J]. Journal of Northeastern University Natural Science, 2018, 39(8): 1069-1074. |
| [8] | WANG Hong, ZHENG Tian-qi, JI Li, LU Zhi-guo. Six-Axis Manipulator’s Sliding Mode Robust Control Based on T-S Fuzzy Compensation [J]. Journal of Northeastern University Natural Science, 2018, 39(3): 378-383. |
| [9] | YANG Hui, HAO Li-na, SUN Zhi-yong, CHEN Yang. Study on Model Free Adaptive Sliding Mode Controller for Artificial Muscle Actuators [J]. Journal of Northeastern University Natural Science, 2017, 38(11): 1618-1622. |
| [10] | LI Xiang-yu, GAO Xian-wen, HOU Yan-bin, WANG Hong-ri. Coupled Dynamic Modeling for Polished Rod Load of Beam Pumping Unit [J]. Journal of Northeastern University Natural Science, 2016, 37(9): 1225-1229. |
| [11] | ZHOU Shu-wen, CHEN Qing-ming, SUN Da-ming. Variable Structure Control with Sliding Mode for ABS of Vehicle Based on EMB System [J]. Journal of Northeastern University Natural Science, 2016, 37(7): 994-997. |
| [12] | DOU Jing-xin, KONG Xiang-xi, WEN Bang-chun. Backstepping Sliding Mode Active Disturbance Rejection Control of Quadrotor Attitude and Its Stability [J]. Journal of Northeastern University Natural Science, 2016, 37(10): 1415-1420. |
| [13] | QIN Da-tong, REN Fei, WU Xiao-ling. Effect of Sun Gear Manufacturing Eccentric Errors on Dynamic Performances of Herringbone Planetary Gear Train [J]. Journal of Northeastern University Natural Science, 2015, 36(5): 709-714. |
| [14] | YE Chengyin, JING Yuanwei, ZHENG Yan, CHU Junxia. FiniteTime Congestion Control Based on Terminal Sliding Mode Control [J]. Journal of Northeastern University Natural Science, 2014, 35(6): 761-765. |
| [15] | WANG Hongwei, YU Chi, WANG Suxin. DiscreteTime Sliding Mode Controller Design Based on Output Feedback [J]. Journal of Northeastern University, 2013, 34(4): 465-468. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||