Journal of Northeastern University(Natural Science) ›› 2024, Vol. 45 ›› Issue (10): 1443-1451.DOI: 10.12068/j.issn.1005-3026.2024.10.010
• Mechanical Engineering • Previous Articles
Xiao-ming CHEN1,2( ), Da-chuan CHEN1, Yu-qian ZHAO1, Cheng LI3
), Da-chuan CHEN1, Yu-qian ZHAO1, Cheng LI3
Received:2023-05-15
Online:2024-10-31
Published:2024-12-31
Contact:
Xiao-ming CHEN
About author:CHEN Xiao-ming,E-mail:chenxiaoming@neuq.edu.cnCLC Number:
Xiao-ming CHEN, Da-chuan CHEN, Yu-qian ZHAO, Cheng LI. Cable-Driven Flexoskeleton Bionic Crab Robots for Beach Environmental Monitoring[J]. Journal of Northeastern University(Natural Science), 2024, 45(10): 1443-1451.

Fig.1 Plane beam element model
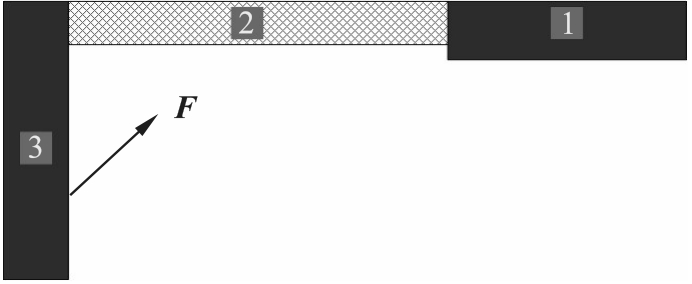
Fig.2 Schematic diagram of the bionic crab robot foot end transformation simulation model
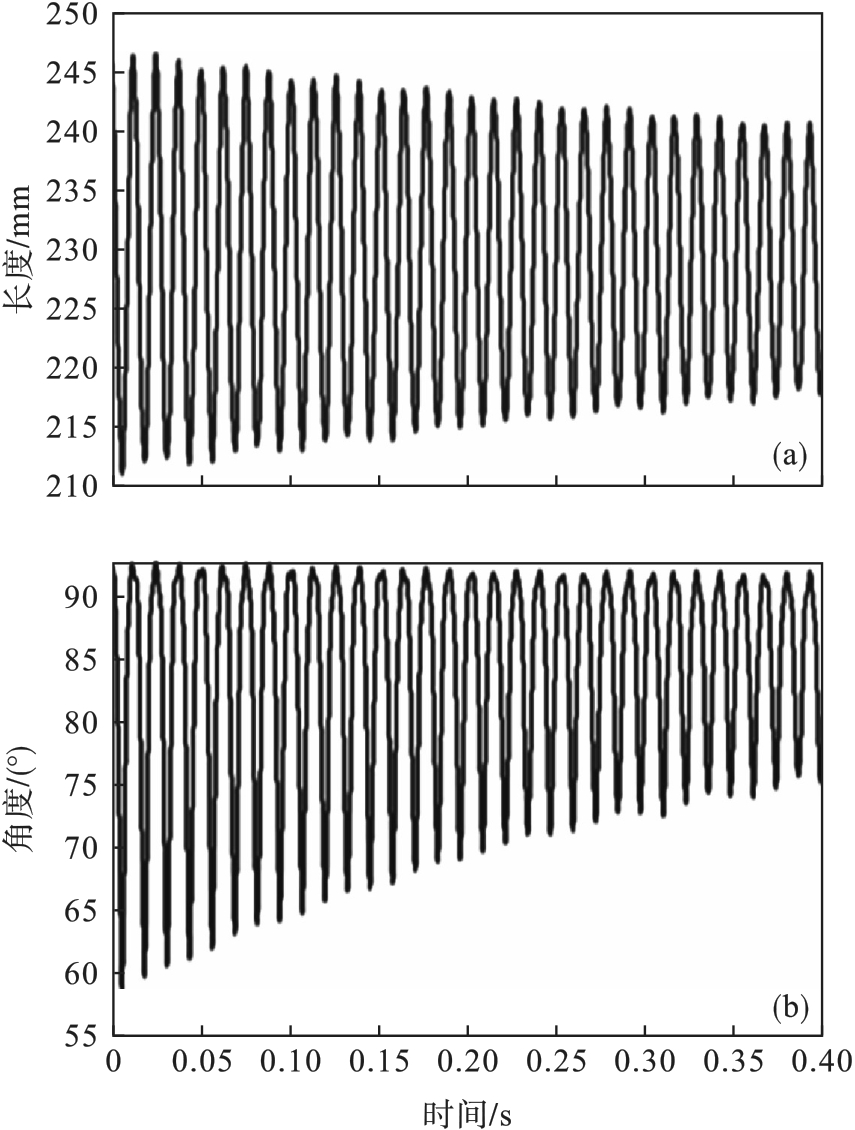
Fig.3 Numerical simulation results of the bionic crab robot foot end transformation
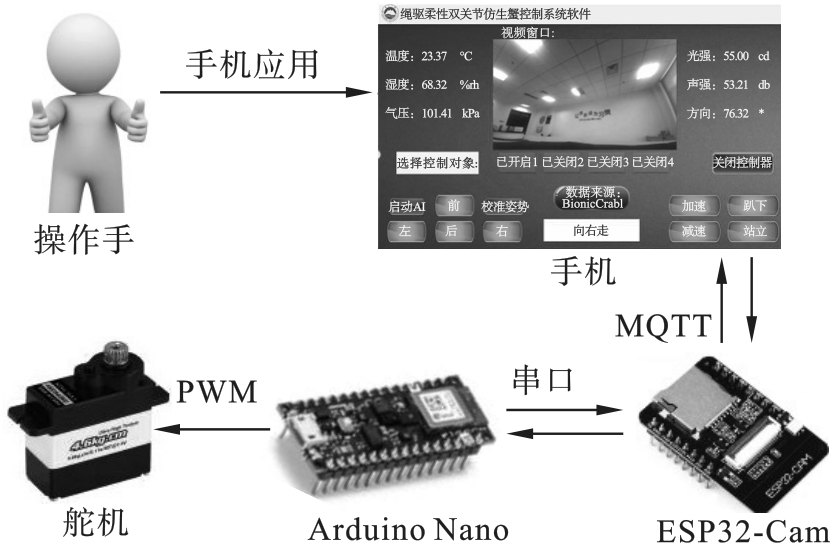
Fig.4 Control system of the bionic crab robot
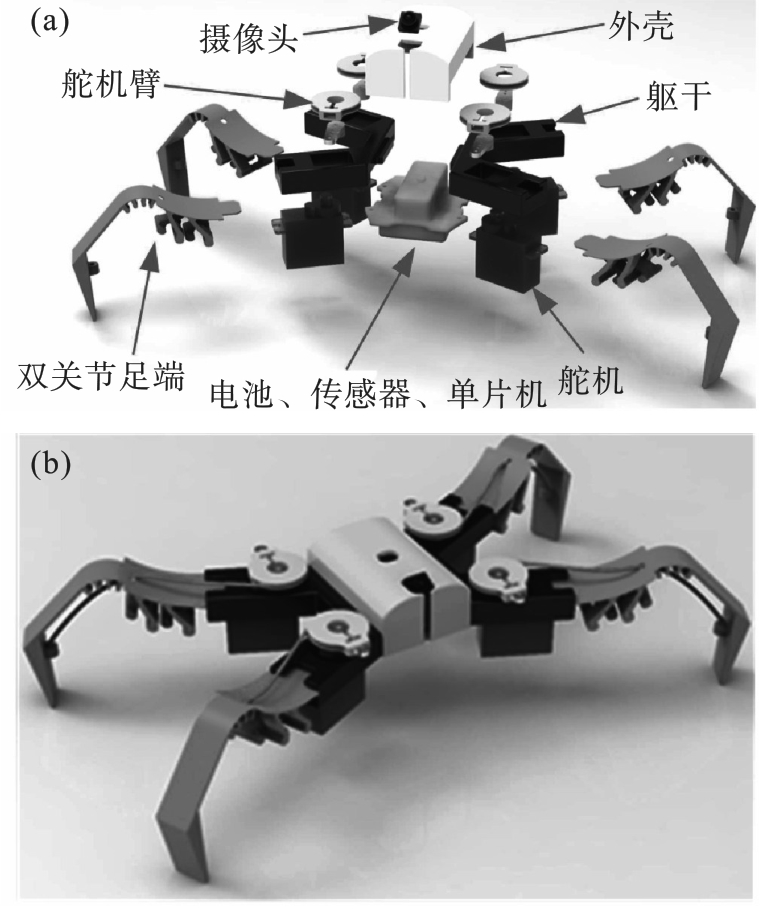
Fig.5 Rear object image of the designed bionic crab robot
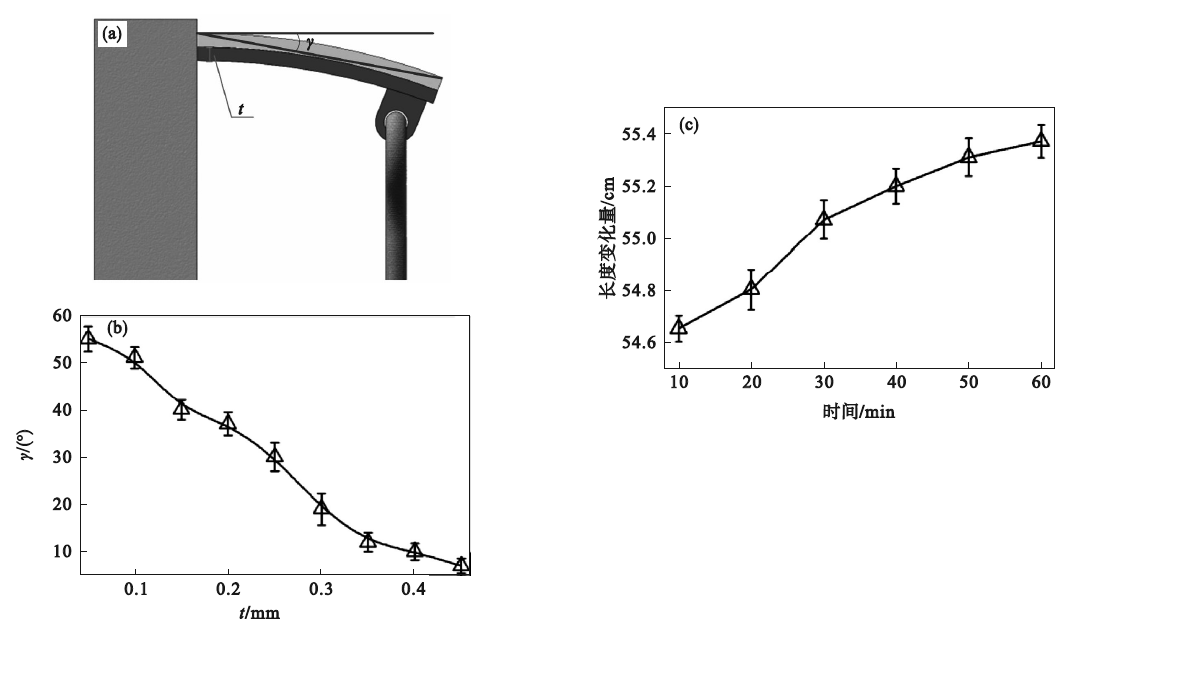
Fig.6 Testing of the bionic crab robot
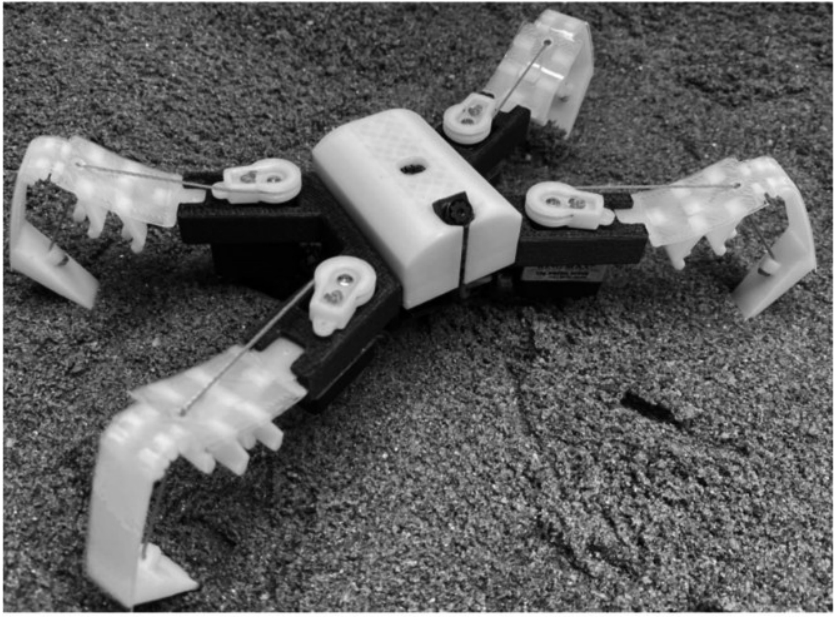
Fig.7 Assembly of the bionic crab robot
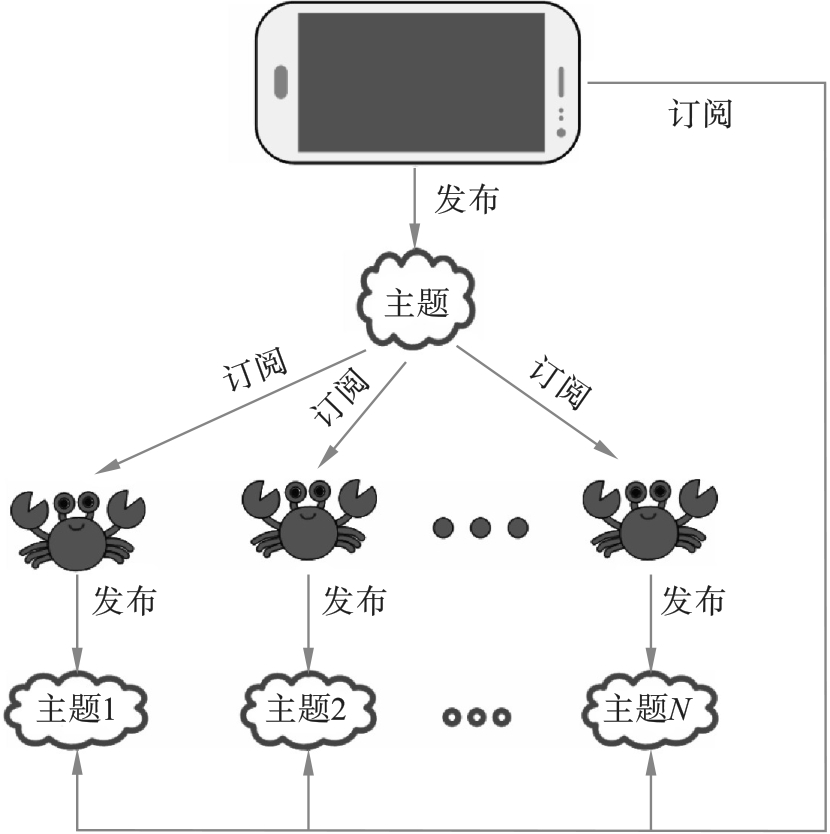
Fig.8 Control principle of the mobile phone APP
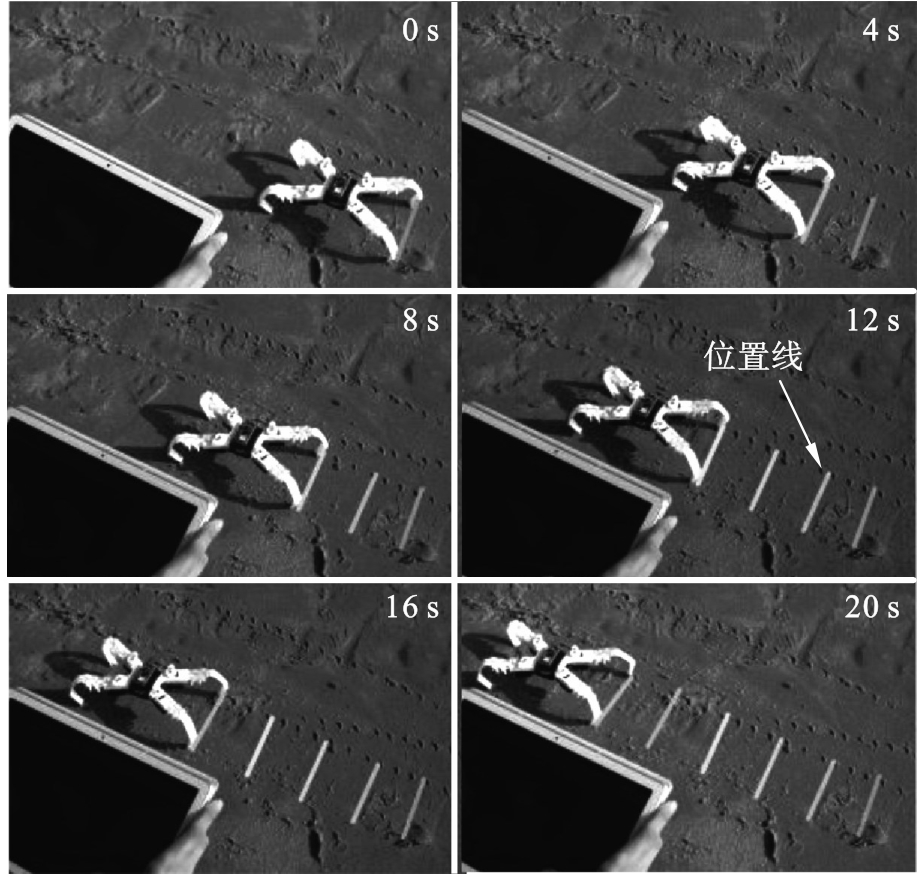
Fig.9 Motion of the bionic crab robot in the case of short range control
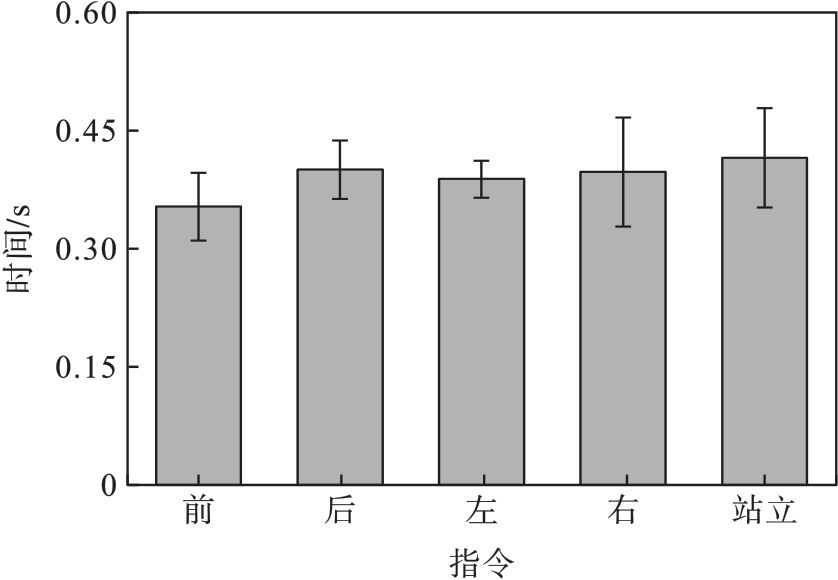
Fig.10 Response time of the bionic crab robot
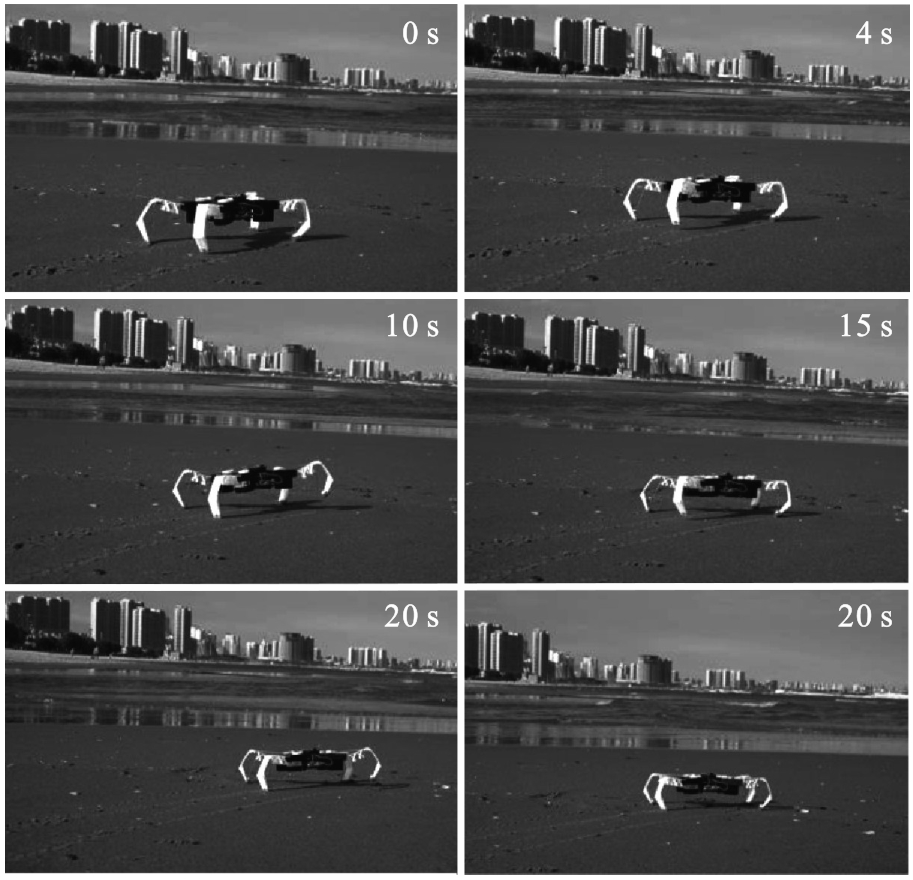
Fig.11 Motion of the bioniic crab in the case of long range control
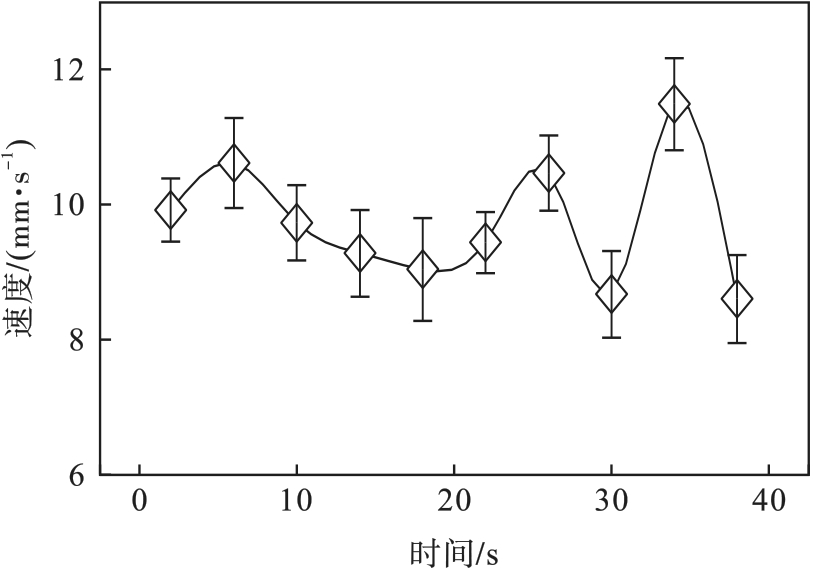
Fig.12 Change in speed of the bionic crab robot over time

Fig.13 Motion of the bioniic crab robot on soft and rugged beach
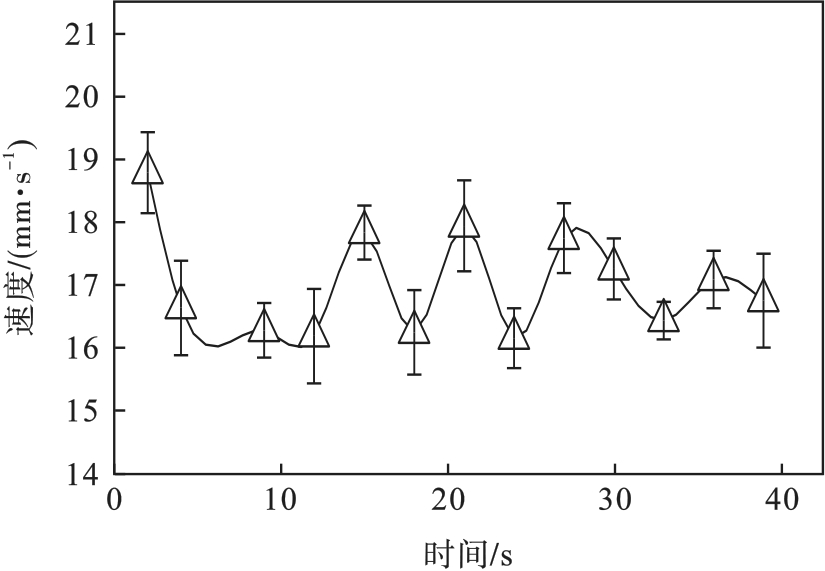
Fig.14 Relationship between the speed and time of the bionic crab robot on soft and rugged beach
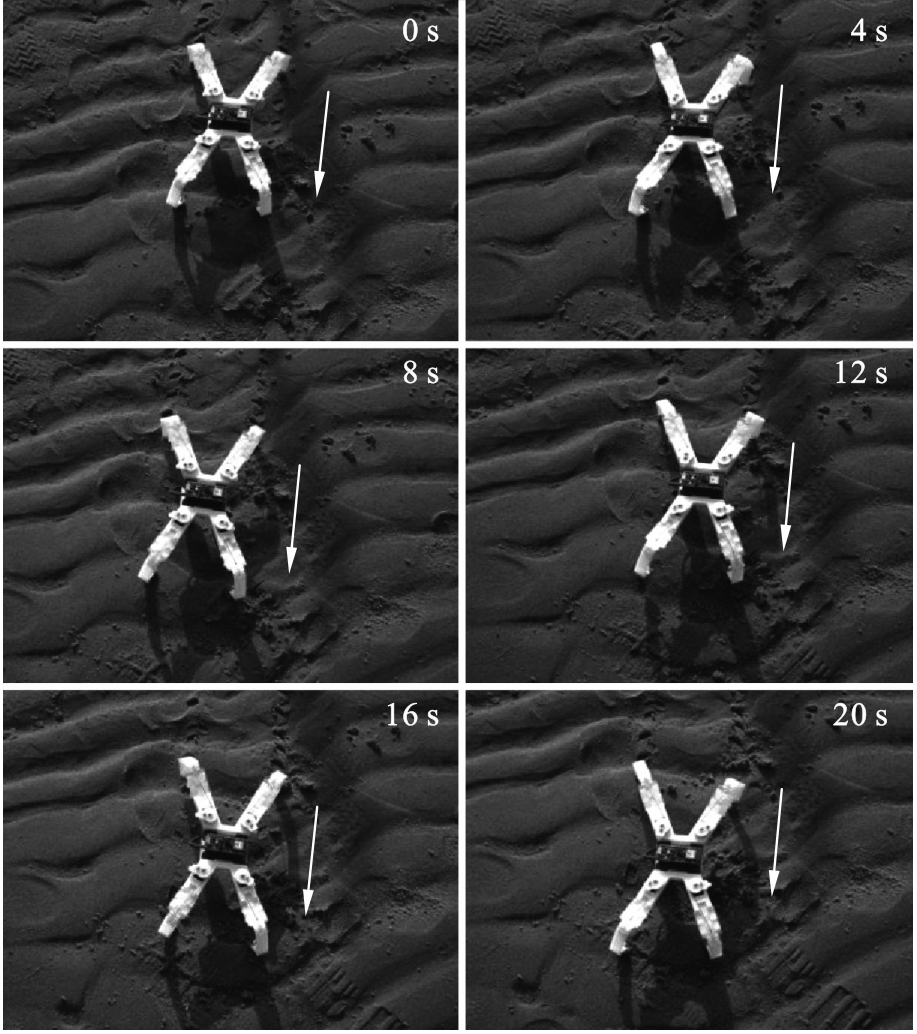
Fig.15 Motion of the bionic crab robot on harden and rugged beach
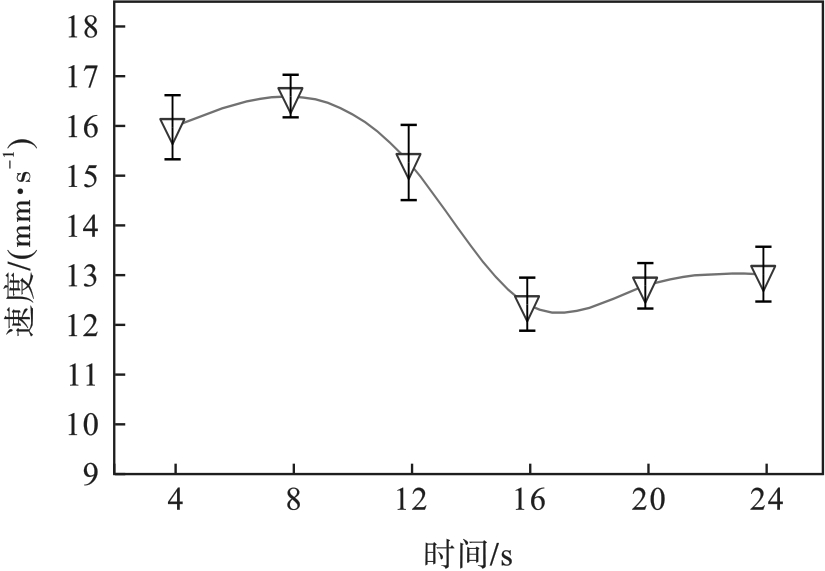
Fig.16 Relationship between the speed and time of the bionic crab robot on harden and rugged beach

Fig.17 Control of two bionic crab robots
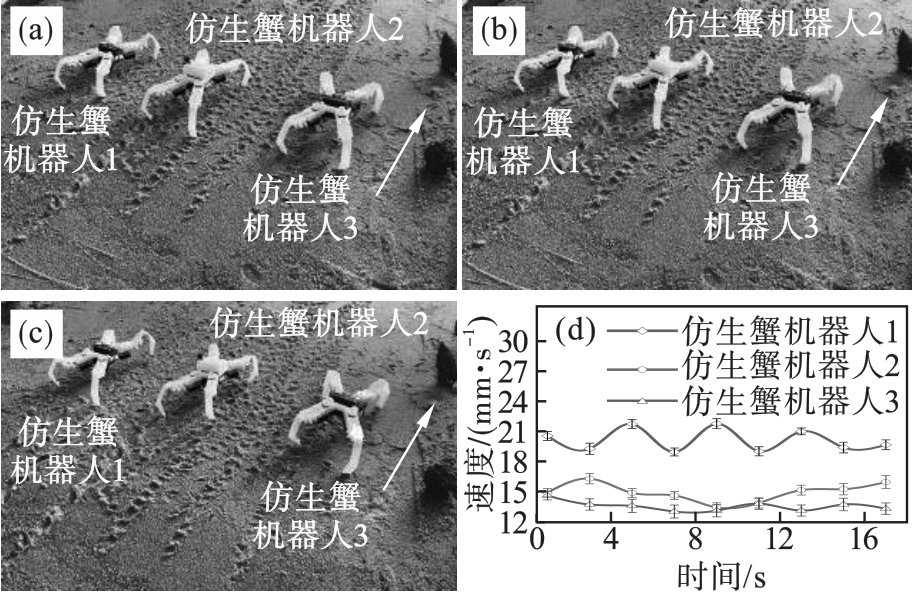
Fig.18 Control of three bionic crab robots
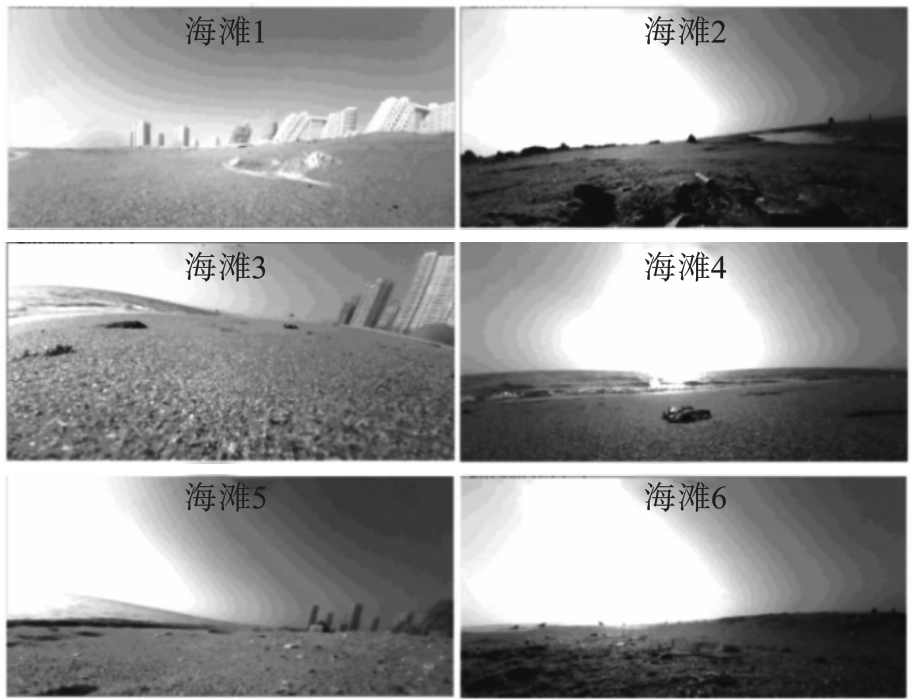
Fig.19 Real time collection of beach environment images
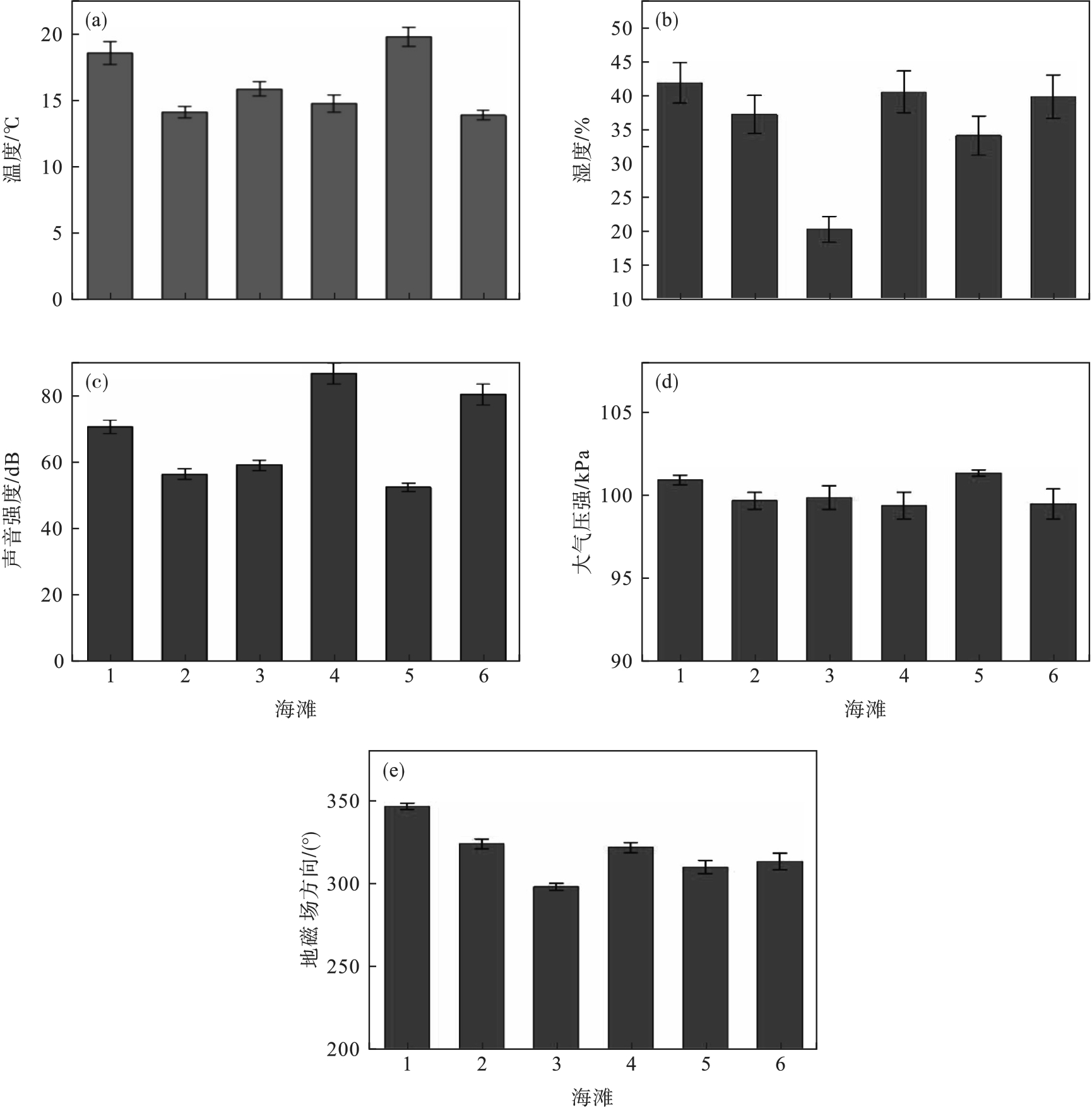
Fig.20 Collection of various environmental parameters in beachs
| 1 | Chen X M, Ren Y K, Jiang T Y,et al.Characterization of particle movement and high‑resolution separation of microalgal cells via induced‑charge electroosmotic advective spiral flow[J].Analytical Chemistry,2021,93(3):1667-1676. |
| 2 | Danovaro R, Fanelli E, Aguzzi J,et al.Ecological variables for developing a global deep‑ocean monitoring and conservation strategy[J].Nature Ecology & Evolution,2020,4(2):181-192. |
| 3 | Chen X M, Shen M, Liu S,et al.Microfluidic impedance cytometry with flat‑end cylindrical electrodes for accurate and fast analysis of marine microalgae[J].Lab on a Chip,2024,24(7):2058-2068. |
| 4 | Galland G, Harrould‑Kolieb E, Herr D.The ocean and climate change policy[J].Climate Policy,2012,12(6):764-771. |
| 5 | Rajasekaran L, Santhanam S M.Optimum frequency selection for localization of underwater AUV using dynamic positioning parameters[J].Microsystem Technologies,2021,27(12):4291-4303. |
| 6 | He Y L, Zhu L Q, Sun G K,et al.Underwater motion characteristics evaluation of multi amphibious spherical robots[J].Microsystem Technologies,2019,25(2):499-508. |
| 7 | Nguyen D N, Ho N L, Dao T P,et al.Multi‑objective optimization design for a sand crab‑inspired compliant microgripper[J].Microsystem Technologies,2019,25(10):3991-4009. |
| 8 | Zheng L, Piao Y, Ma Y K,et al.Development and control of articulated amphibious spherical robot[J].Microsystem Technologies,2020,26(5):1553-1561. |
| 9 | Chang H, Chang J, Clifton G,et al.Anisotropic compliance of robot legs improves recovery from swing‑phase collisions[J].Bioinspiration & Biomimetics,2021,16(5):056001. |
| 10 | Boxerbaum A S, Bachmann R J, Quinn R D,et al.Design and testing of a highly mobile insect‑inspired autonomous robot in a beach environment[J].International Journal of Design & Nature and Ecodynamics,2010,4(4):319-336. |
| 11 | De Waard M, Inja M, Visser A.Analysis of flat terrain for the atlas robot[C]//2013 3rd Joint Conference of AI & Robotics and 5th RoboCup Iran Open International Symposium.Tehran,2013:1-6. |
| 12 | Branyan C, Hatton R L, Mengüç Y.Snake‑inspired kirigami skin for lateral undulation of a soft snake robot[J].IEEE Robotics and Automation Letters,2020,5(2):1728-1733. |
| 13 | Estremera J, Cobano J A, Gonzalez de Santos P.Continuous free‑crab gaits for hexapod robots on a natural terrain with forbidden zones:an application to humanitarian demining[J].Robotics and Autonomous Systems,2010,58(5):700-711. |
| 14 | Graf N M, Daltorio K A.Get a grip:inward dactyl motions improve efficiency of sideways‑walking gait for an amphibious crab‑like robot[J].Bioinspiration & Biomimetics,2022,17(6):066008. |
| 15 | Wang L Q, Liu D F, Chen D L,et al.The virtual prototype design and simulation of amphibious bio‑crab robot with variable posture[C]//2009 IEEE International Conference on Robotics and Biomimetics (ROBIO).Guilin,2009:2140-2145. |
| 16 | Grezmak J, Graf N, Behr A,et al.Terrain classification based on sensed leg compliance for amphibious crab robot[J].IEEE Sensors Journal,2021,21(20):23308-23316. |
| 17 | Billah M M, Ahmed M, Farhana S.Walking hexapod robot in disaster recovery:developing algorithm for terrain negotiation and navigation[J].World Academy of Science,Engineering and Technology International Journal of Mechanical and Mechatronics Engineering,2008,2(6):795-800. |
| 18 | Greiner H, Shectman A, Won C,et al.Autonomous legged underwater vehicles for near land warfare[C]//Proceedings of Symposium on Autonomous Underwater Vehicle Technology.Monterey:IEEE,1996:41-48. |
| 19 | Jiang M S, Song R, Gravish N.Knuckles that buckle:compliant underactuated limbs with joint hysteresis enable minimalist terrestrial robots[C]//2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS).Las Vegas,2020:3732-3738. |
| 20 | Chen X M, Liu S, Shen M,et al.Dielectrophoretic characterization and selection of non‑spherical flagellate algae in parallel channels with right‑angle bipolar electrodes[J].Lab on a Chip,2024,24(9):2506-2517. |
| 21 | Jiang M S, Zhou Z Y, Gravish N.Flexoskeleton printing enables versatile fabrication of hybrid soft and rigid robots[J].Soft Robotics,2020,7(6):770-778. |
| 22 | Xu M, Wang G, Rong C.Fiber‑reinforced flexible joint actuator for soft arthropod robots[J].Sensors and Actuators A:Physical,2022,340:113522. |
| 23 | Kim B, Lee M G, Lee Y P,et al.An earthworm‑like micro robot using shape memory alloy actuator[J].Sensors and Actuators A:Physical,2006,125(2):429-437. |
| 24 | Chang L F, Liu Y F, Yang Q,et al.Ionic electroactive polymers used in bionic robots:a review[J].Journal of Bionic Engineering,2018,15(5):765-782. |
| 25 | Jin X, Cui X, Agrawal S K.Design of a cable‑driven active leg exoskeleton (C-ALEX) and gait training experiments with human subjects[C]//2015 IEEE International Conference on Robotics and Automation (ICRA).Seattle,2015:5578-5583. |
| 26 | Wehner M, Quinlivan B, Aubin P M,et al.A lightweight soft exosuit for gait assistance[C]//2013 IEEE International Conference on Robotics and Automation.Karlsruhe,2013:3362-3369. |
| 27 | Lv P F, Yang X, Bisoyi H K,et al.Stimulus‑driven liquid metal and liquid crystal network actuators for programmable soft robotics[J].Materials Horizons,2021,8(9):2475-2484. |
| 28 | Ren J, Wu F, Shang E W,et al.3D printed smart elastomeric foam with force sensing and its integration with robotic gripper[J].Sensors and Actuators A:Physical,2023,349:113998. |
| 29 | Gueners D, Chanal H, Bouzgarrou B C.Design and implementation of a cable‑driven parallel robot for additive manufacturing applications[J].Mechatronics,2022,86:102874. |
| 30 | Jin X, Prado A, Agrawal S K.Retraining of human gait‑are lightweight cable‑driven leg exoskeleton designs effective?[J].IEEE Transactions on Neural Systems and Rehabilitation Engineering,2018,26(4):847-855. |
| [1] | Quan SHAN, Shun ZHANG, Jian-cong HUANG, Yan CHEN. Research on Fuzzy Adaptive Interactive Control of Upper Limb Rehabilitation Robots [J]. Journal of Northeastern University(Natural Science), 2024, 45(7): 974-983. |
| [2] | Hao WU, Zhong-chao LIANG, Wen-cheng WANG, Yong-fu WANG. Trajectory Tracking Control Method of Wheeled Mobile Robot with Uncertain Slippage [J]. Journal of Northeastern University(Natural Science), 2024, 45(6): 858-865. |
| [3] | Zhi-guo LU, Xiao WANG. Mechanical Arm Trajectory Planning Based on B-Spline and Whale Optimization Algorithm [J]. Journal of Northeastern University(Natural Science), 2024, 45(5): 683-689. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||