东北大学学报(自然科学版) ›› 2025, Vol. 46 ›› Issue (6): 93-101.DOI: 10.12068/j.issn.1005-3026.2025.20239074
吴海彬1,2, 黄浯锴1
收稿日期:2023-12-21
出版日期:2025-06-15
发布日期:2025-09-02
作者简介:吴海彬(1973—),男,内蒙古宁城县人,福州大学教授,博士生导师.
基金资助:Hai-bin WU1,2, Wu-kai HUANG1
Received:2023-12-21
Online:2025-06-15
Published:2025-09-02
摘要:
提出一种基于3D点云的平面角接焊缝特征提取与轨迹规划策略,用于解决焊缝的自动识别与机器人自动跟踪焊接.首先,基于差异点云分割方法提取待焊工件,并进行点云预处理.其次,为获得焊缝特征点,提出了工件结构分割特征提取算法.接着基于非均匀有理B样条(NURBS)曲线的路径拟合方法进行拟合.最后,提出一种焊接点位的机器人位姿估计方法,得到各路径点位姿以供焊接.该策略适用于直线与各种平面曲线焊缝.实验结果表明,该策略能够精确地提取角接焊缝位置并生成所需的轨迹点位姿,各轴最大误差控制在1 mm之内,总耗时不超过18 s,为高效自动化焊接提供参考.
中图分类号:
吴海彬, 黄浯锴. 基于3D点云的平面角接焊缝特征提取与运动跟踪[J]. 东北大学学报(自然科学版), 2025, 46(6): 93-101.
Hai-bin WU, Wu-kai HUANG. Feature Extraction and Motion Tracking of Planar Fillet Weld Seams Based on 3D Point Cloud[J]. Journal of Northeastern University(Natural Science), 2025, 46(6): 93-101.
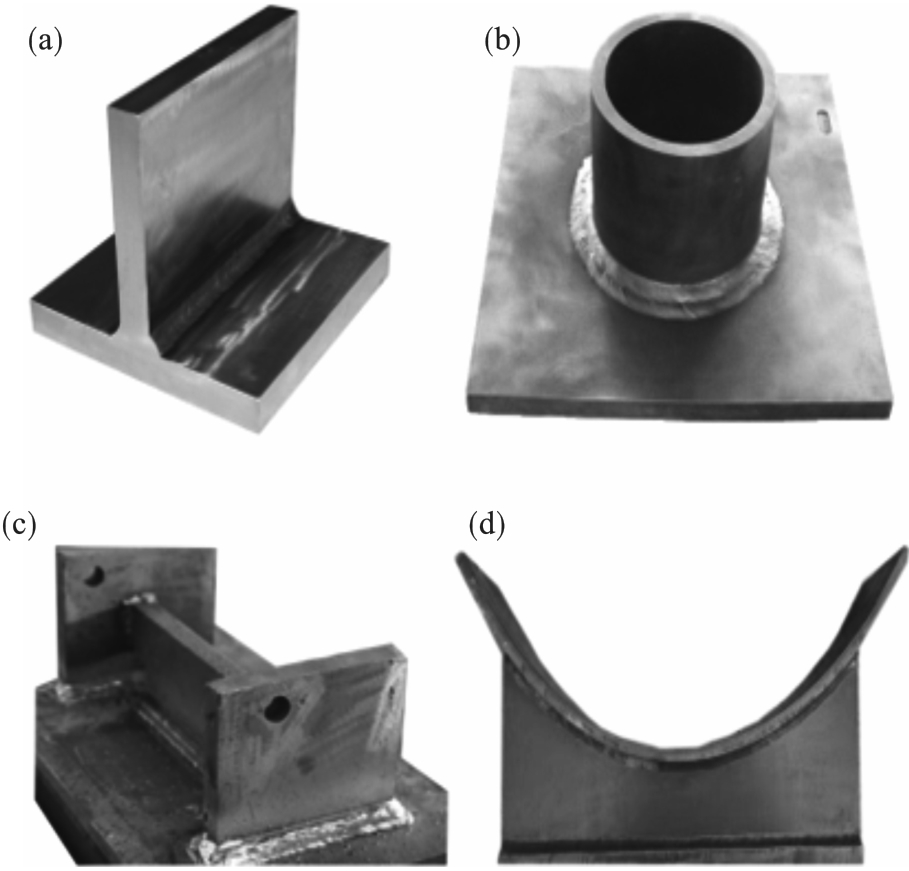
图1 平面角焊缝的典型工件(a)—直线焊缝工件; (b)—圆柱焊缝工件;(c)—折线焊缝工件; (d)—曲线焊缝工件.
Fig.1 Typical workpieces for planar fillet weld seams
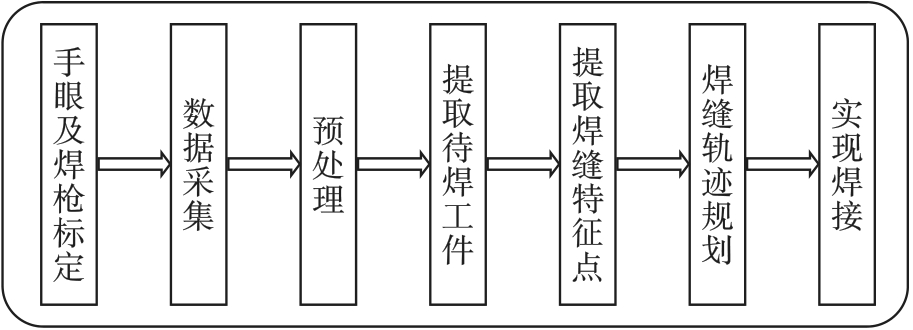
图2 角接焊缝提取系统整体方案
Fig.2 Overall scheme for the fillet weld seam extraction system
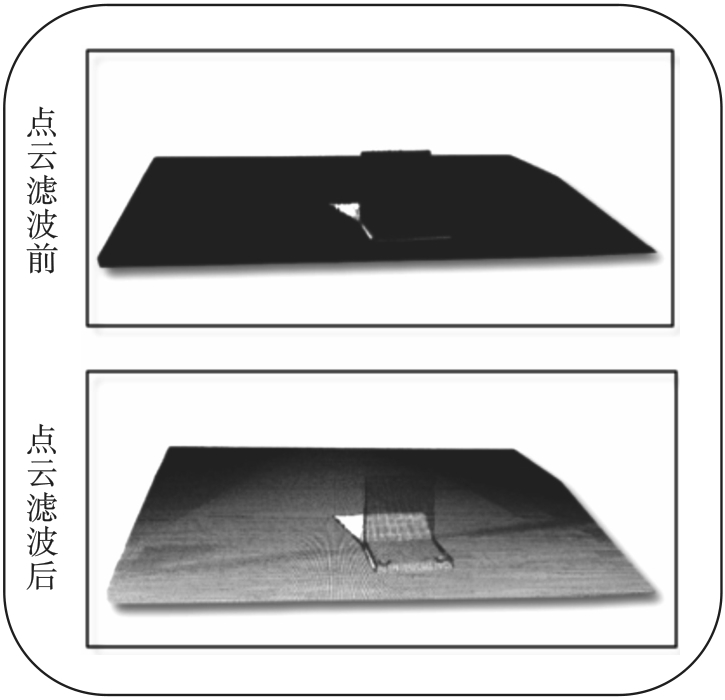
图3 点云滤波算法效果
Fig.3 Effect of point cloud filtering algorithm
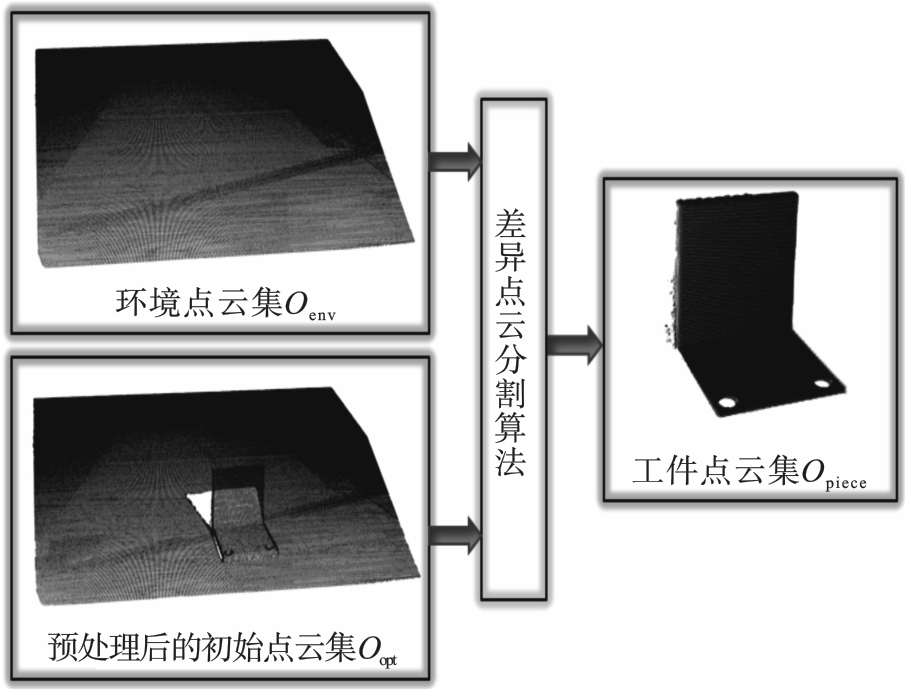
图4 差异点云分割算法效果
Fig.4 Effect of differential point cloud segmentation algorithm
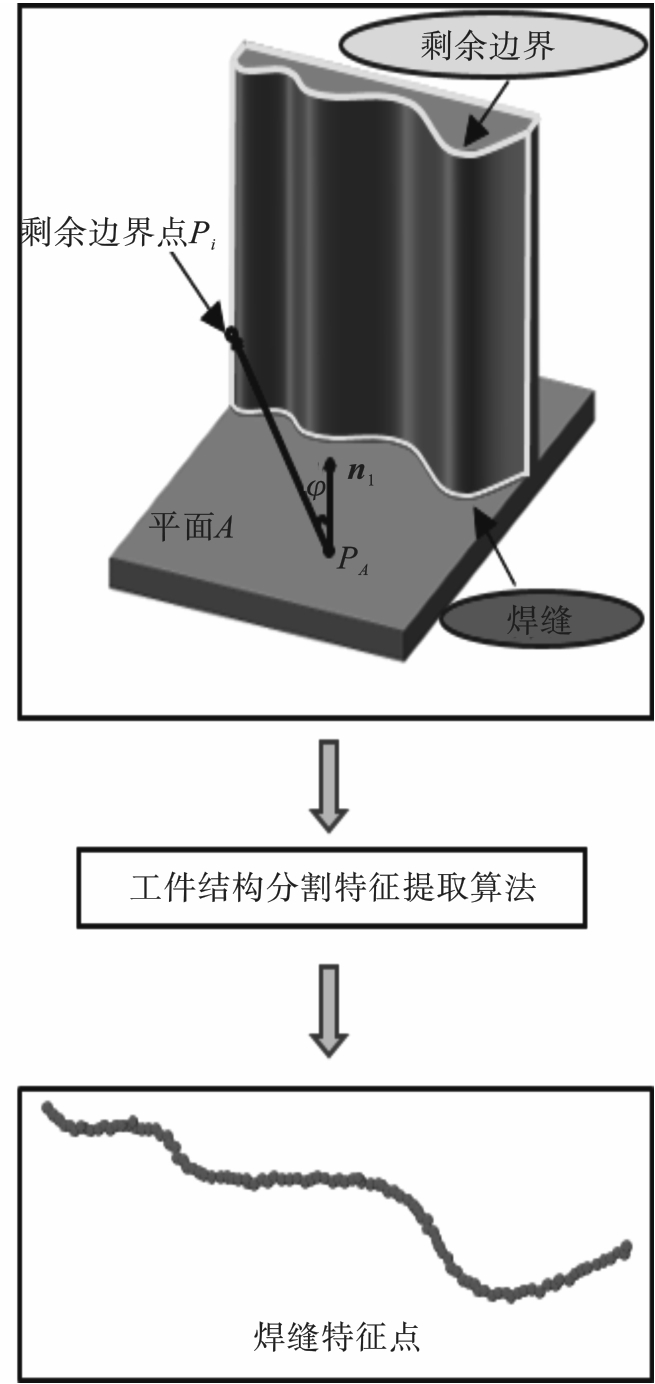
图5 平面曲线角接焊缝提取示意图
Fig.5 Schematic diagram of plane curve fillet weld seam extraction
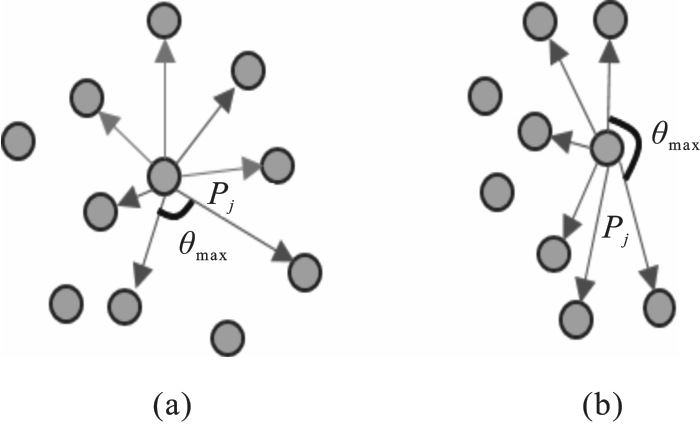
图6 边缘检测算法示意图(a)—θmax小于180°; (b)—θmax大于180°.
Fig.6 Schematic diagram of the edge detection algorithm
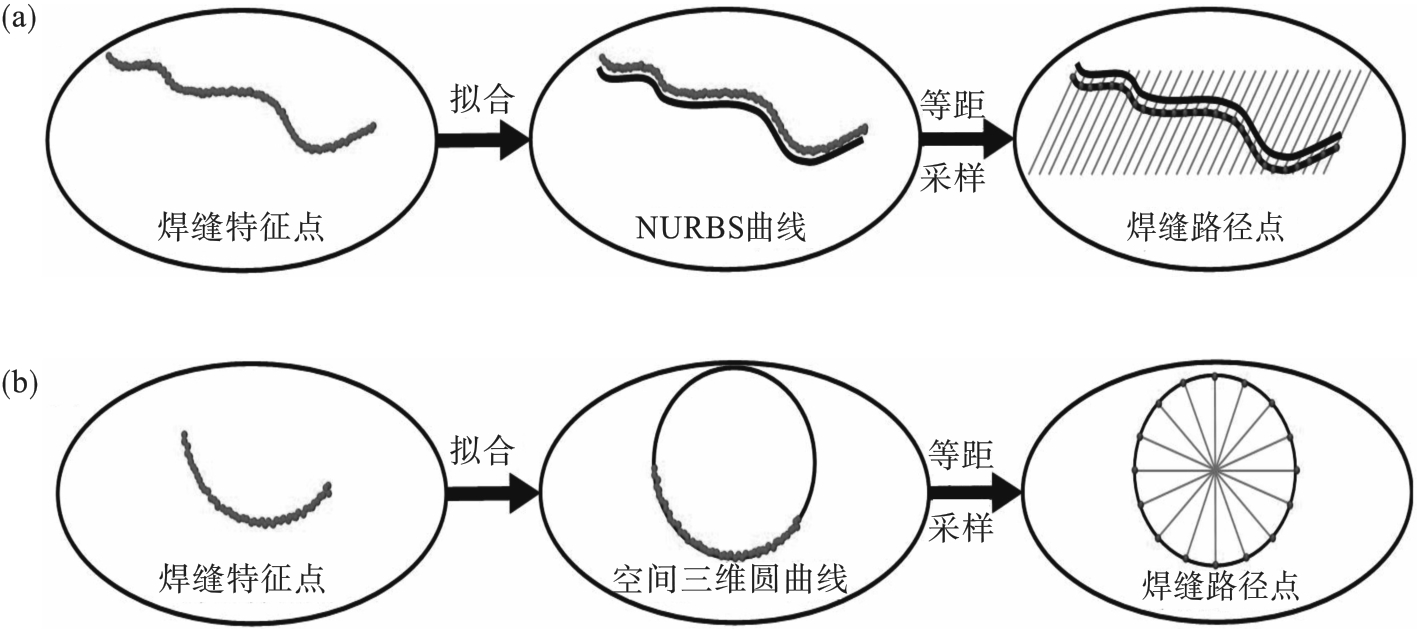
图7 焊缝路径点提取(a)—NURBS曲线拟合示意图; (b)—空间三维圆焊缝拟合示意图.
Fig.7 Weld path point extraction
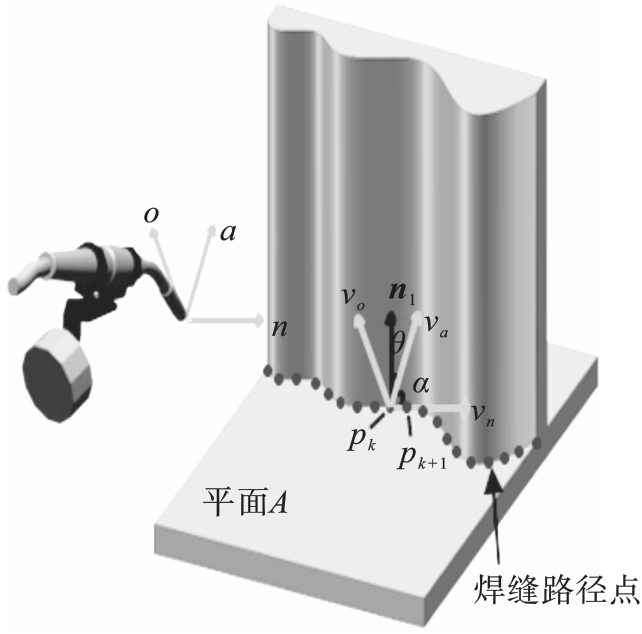
图8 姿态估计示意图
Fig.8 Position estimation diagram

图9 角接焊缝提取实验平台
Fig.9 Experimental platform for fillet weld seam extraction
误差类型 | 本文算法 | 传统算法 |
|---|---|---|
X轴最大误差 | 0.514 | 0.718 |
Y轴最大误差 | 0.476 | 0.606 |
Z轴最大误差 | 0.458 | 0.801 |
X轴平均误差 | 0.233 | 0.237 |
Y轴平均误差 | 0.088 | 0.219 |
Z轴平均误差 | 0.080 | 0.120 |
平均距离偏差 | 0.287 | 0.388 |
表1 不同预处理算法下简单直线焊缝测量误差
Table 1 Measurement error of simple straight line weld seam under different pre-processing algorithms mm
误差类型 | 本文算法 | 传统算法 |
|---|---|---|
X轴最大误差 | 0.514 | 0.718 |
Y轴最大误差 | 0.476 | 0.606 |
Z轴最大误差 | 0.458 | 0.801 |
X轴平均误差 | 0.233 | 0.237 |
Y轴平均误差 | 0.088 | 0.219 |
Z轴平均误差 | 0.080 | 0.120 |
平均距离偏差 | 0.287 | 0.388 |
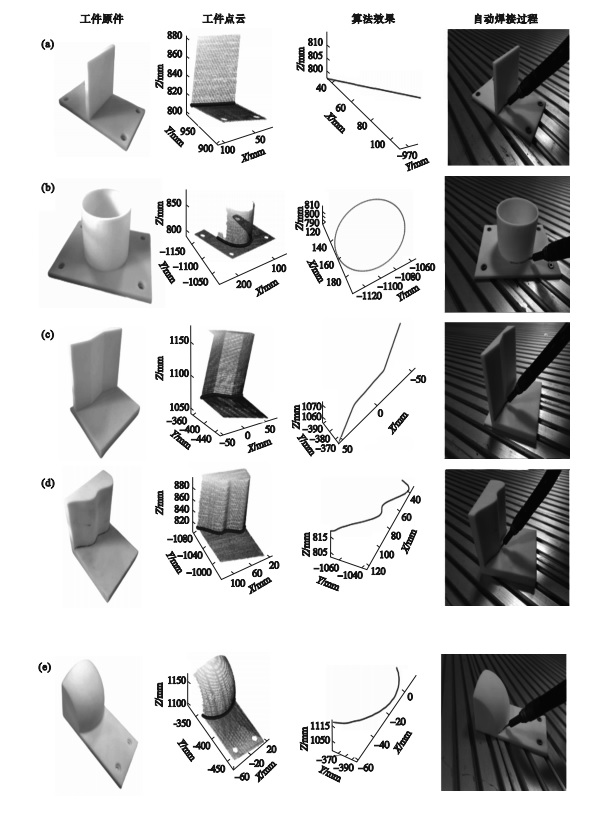
图10 各类工件实验效果(a)—简单直线焊缝提取; (b)—平面圆柱焊缝提取; (c)—平面折线焊缝提取;(d)—平面曲线焊缝提取; (e)—平面曲面焊缝提取.
Fig.10 Experimental effect of various workpieces
| 焊缝类型 | ME/mm | RMSE/mm | ||||
|---|---|---|---|---|---|---|
| X轴 | Y轴 | Z轴 | X轴 | Y轴 | Z轴 | |
| 简单直线 | 0.514 | 0.476 | 0.458 | 0.275 | 0.113 | 0.101 |
| 平面圆柱 | 0.944 | 0.570 | 0.653 | 0.323 | 0.189 | 0.198 |
| 平面折线 | 0.927 | 0.893 | 0.869 | 0.326 | 0.570 | 0.407 |
| 平面曲线 | 0.886 | 0.823 | 0.815 | 0.314 | 0.558 | 0.396 |
| 平面曲面 | 0.876 | 0.802 | 0.811 | 0.325 | 0.512 | 0.384 |
表2 不同角接焊缝的测量误差
Table 2 Measurement errors for different fillet welds
| 焊缝类型 | ME/mm | RMSE/mm | ||||
|---|---|---|---|---|---|---|
| X轴 | Y轴 | Z轴 | X轴 | Y轴 | Z轴 | |
| 简单直线 | 0.514 | 0.476 | 0.458 | 0.275 | 0.113 | 0.101 |
| 平面圆柱 | 0.944 | 0.570 | 0.653 | 0.323 | 0.189 | 0.198 |
| 平面折线 | 0.927 | 0.893 | 0.869 | 0.326 | 0.570 | 0.407 |
| 平面曲线 | 0.886 | 0.823 | 0.815 | 0.314 | 0.558 | 0.396 |
| 平面曲面 | 0.876 | 0.802 | 0.811 | 0.325 | 0.512 | 0.384 |
| 步骤名称 | 运行时间/s |
|---|---|
| 预处理 | 7.015 |
| 工件提取 | 8.359 |
表3 预处理与工件提取算法运行时间 (extraction algorithms)
Table 3 Running time of pre-processing and artifact
| 步骤名称 | 运行时间/s |
|---|---|
| 预处理 | 7.015 |
| 工件提取 | 8.359 |
| 焊缝类型 | 运行时间/s |
|---|---|
| 简单直线 | 0.804 |
| 平面圆柱角接 | 0.594 |
| 平面折线 | 2.118 |
| 平面曲线 | 2.026 |
| 平面曲面 | 1.954 |
表4 不同角接焊缝的工件提取后算法运行时间 (extraction for different fillet weld seams)
Table 4 Algorithm running time after workpiece
| 焊缝类型 | 运行时间/s |
|---|---|
| 简单直线 | 0.804 |
| 平面圆柱角接 | 0.594 |
| 平面折线 | 2.118 |
| 平面曲线 | 2.026 |
| 平面曲面 | 1.954 |
| [1] | 时尚,刘丰刚,黄春平,等.激光复合热源焊接技术的研究进展[J].材料导报,2022,36(11):170-177. |
| Shi Shang, Liu Feng-gang, Huang Chun-ping, et al. Research progress of laser hybrid heat source welding technology [J]. Materials Reports, 2022, 36(11):170-177. | |
| [2] | Zhang Y K, Jiang Y, Tian X C, et al. A point cloud-based welding trajectory planning method for plane welds[J]. The International Journal of Advanced Manufacturing Technology, 2023, 125(3): 1645-1659. |
| [3] | Li X D, Li X H, Ge S S, et al. Automatic welding seam tracking and identification[J]. IEEE Transactions on Industrial Electronics, 2017, 64(9): 7261-7271. |
| [4] | Ye Z, Fang G, Chen S B, et al. A robust algorithm for weld seam extraction based on prior knowledge of weld seam[J]. Sensor Review, 2013, 33(2): 125-133. |
| [5] | Wu K X, Wang T Q, He J J, et al. Autonomous seam recognition and feature extraction for multi-pass welding based on laser stripe edge guidance network[J]. The International Journal of Advanced Manufacturing Technology, 2020, 111(9): 2719-2731. |
| [6] | Liu F Q, Wang Z Y, Ji Y. Precise initial weld position identification of a fillet weld seam using laser vision technology[J]. The International Journal of Advanced Manufacturing Technology, 2018, 99(5): 2059-2068. |
| [7] | Xu Y L, Lyu N, Fang G, et al. Welding seam tracking in robotic gas metal arc welding[J]. Journal of Materials Processing Technology, 2017, 248: 18-30. |
| [8] | Yang L, Li E, Long T, et al. A high-speed seam extraction method based on the novel structured-light sensor for arc welding robot: a review[J]. IEEE Sensors Journal, 2018, 18(21): 8631-8641. |
| [9] | Ibanez I, Aguirre M A, Torralba A, et al. A low cost 3D vision system for positioning welding mobile robots using a FPGA prototyping system[C]//IEEE 2002 28th Annual Conference of the Industrial Electronics Society. Seville, 2002: 1590-1593. |
| [10] | Zhou P, Peng R, Xu M, et al. Path planning with automatic seam extraction over point cloud models for robotic arc welding[J]. IEEE Robotics and Automation Letters, 2021, 6(3): 5002-5009. |
| [11] | Gao J, Li F, Zhang C, et al. A method of D-type weld seam extraction based on point clouds[J]. IEEE Access, 2021, 9: 65401-65410. |
| [12] | Kim J, Lee J, Chung M, et al. Multiple weld seam extraction from RGB-depth images for automatic robotic welding via point cloud registration[J]. Multimedia Tools and Applications, 2021, 80(6): 9703-9719. |
| [13] | Shen Z Y, Feydy J, Liu P R, et al. Accurate point cloud registration with robust optimal transport[J]. Advances in Neural Information Processing Systems, 2021, 34: 5373-5389. |
| [14] | Tsai R Y, Lenz R K. A new technique for fully autonomous and efficient 3D robotics hand/eye calibration[J]. IEEE Transactions on Robotics and Automation, 1989, 5(3): 345-358. |
| [15] | 朴永杰,邱涛,陈善本.弧焊机器人TCF参数的标定[J].机器人, 2001, 23(2):109-112. |
| Yong-jie Piao, Qiu Tao, Chen Shan-ben. Calibration of TCF parameters of arc welding robot [J]. Robot, 2001, 23(2):109-112. | |
| [16] | Ni H, Lin X G, Ning X G, et al. Edge detection and feature line tracing in 3D-point clouds by analyzing geometric properties of neighborhoods[J]. Remote Sensing, 2016, 8(9): 710. |
| [17] | Zhang J X, Lin X G, Ning X G. SVM-based classification of segmented airborne LiDAR point clouds in urban areas[J]. Remote Sensing, 2013, 5(8): 3749-3775. |
| [18] | 潘日晶. NURBS 曲线曲面的显式矩阵表示及其算法[J]. 计算机学报, 2001, 24(4): 358-366. |
| Pan Ri-jing. Explicit matrix representation for NURBS curves and surfaces and its algorithm [J].Chinese Journal of Computers, 2001, 24(4): 358-366. | |
| [19] | Sun K K, Hua C T, Xiong X M. Research on spatial arc fitting method based on RANSAN algorithm[C]//2019 Chinese Control Conference (CCC) .Guangzhou, 2019: 7534-7538. |
| [20] | 刘立君,戴鸿滨,高洪明,等.力觉遥示教姿态几何平面法[J].中国机械工程,2008,19(18):2249-2252. |
| Liu Li-jun, Dai Hong-bin, Gao Hong-ming, et al. Geometry arithmetic on the tele-teaching pose based on force sensing [J]. China Mechanical Engineering, 2008,19(18):2249-2252. |
| [1] | 李立振, 马淑华, 郭泽旭, 车晓辰. 基于X-ray-RTDETR的X射线图像违禁品检测算法[J]. 东北大学学报(自然科学版), 2025, 46(6): 8-15. |
| [2] | 官宏, 熊茜, 马辉, 汪伟伟. 旋转叶片裂纹故障特征提取与分析[J]. 东北大学学报(自然科学版), 2025, 46(3): 60-68. |
| [3] | 王植, 王坤, 王梦晴. 多尺度特征融合的Transformer遥感影像超分辨率重建[J]. 东北大学学报(自然科学版), 2024, 45(8): 1178-1184. |
| [4] | 沙晓鹏, 曹加奇, 李文静, 秦晔. 单目视频图像序列三维重建方法[J]. 东北大学学报(自然科学版), 2024, 45(12): 1680-1687. |
| [5] | 李寿涛, 屈如意, 张宇, 于丁力. 基于变分模态分解的冻结步态识别方法[J]. 东北大学学报(自然科学版), 2023, 44(11): 1543-1548. |
| [6] | 刘洋, 闫冬梅, 孟范伟. 基于Transformer改进的两分支行人重识别算法[J]. 东北大学学报(自然科学版), 2023, 44(1): 26-32. |
| [7] | 王娜, 李杨, 彭锟. 基于多角度特征提取的舵机故障诊断方法[J]. 东北大学学报(自然科学版), 2022, 43(9): 1240-1249. |
| [8] | 于哲舟, 刘岩, 刘元宁. 基于YOLOV3改进的虹膜定位算法[J]. 东北大学学报(自然科学版), 2022, 43(4): 496-501. |
| [9] | 闫康, 黄训江, 张强, 王登. 基于At-LSTM的产品创新特征识别[J]. 东北大学学报(自然科学版), 2022, 43(10): 1506-1512. |
| [10] | 任朝晖, 于天壮, 丁东, 周世华. 基于VMD-DBN的滚动轴承故障诊断方法[J]. 东北大学学报(自然科学版), 2021, 42(8): 1105-1110. |
| [11] | 韩鹏, 郭天, 汪晋宽, 史泽伟. 基于mRMR-ESN的单变量光伏功率预测[J]. 东北大学学报(自然科学版), 2021, 42(2): 174-179. |
| [12] | 赵琪珲, 李大鹏, 高天寒, 闻英友. 基于图注意力网络的案件罪名预测方法:CP-GAT[J]. 东北大学学报(自然科学版), 2021, 42(12): 1681-1687. |
| [13] | 李晨, 张家伟, 张昊, 汪茜. 基于生成对抗网络的低分化宫颈癌病理图像分类[J]. 东北大学学报:自然科学版, 2020, 41(7): 1054-1061. |
| [14] | 侯延彬, 陈炳均, 高宪文. 基于GM-ELM的有杆泵抽油井故障诊断[J]. 东北大学学报:自然科学版, 2019, 40(12): 1673-1678. |
| [15] | 纪英俊, 勇晓玥, 刘英林, 刘士新. 基于随机森林的热轧带钢质量分析与预测方法[J]. 东北大学学报:自然科学版, 2019, 40(1): 11-15. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||