Journal of Northeastern University(Natural Science) ›› 2024, Vol. 45 ›› Issue (1): 1-9.DOI: 10.12068/j.issn.1005-3026.2024.01.001
• Information & Control • Next Articles
Peng-shuai HOU1, Da-peng ZHOU2, Da-peng YANG2, Jie CHEN1
Received:2022-07-21
Online:2024-01-15
Published:2024-04-02
CLC Number:
Peng-shuai HOU, Da-peng ZHOU, Da-peng YANG, Jie CHEN. Research on Positioning of Unmanned Carrier-Based Aircraft Based on Multi-sensor Fusion in Ship’s Surface Environment[J]. Journal of Northeastern University(Natural Science), 2024, 45(1): 1-9.
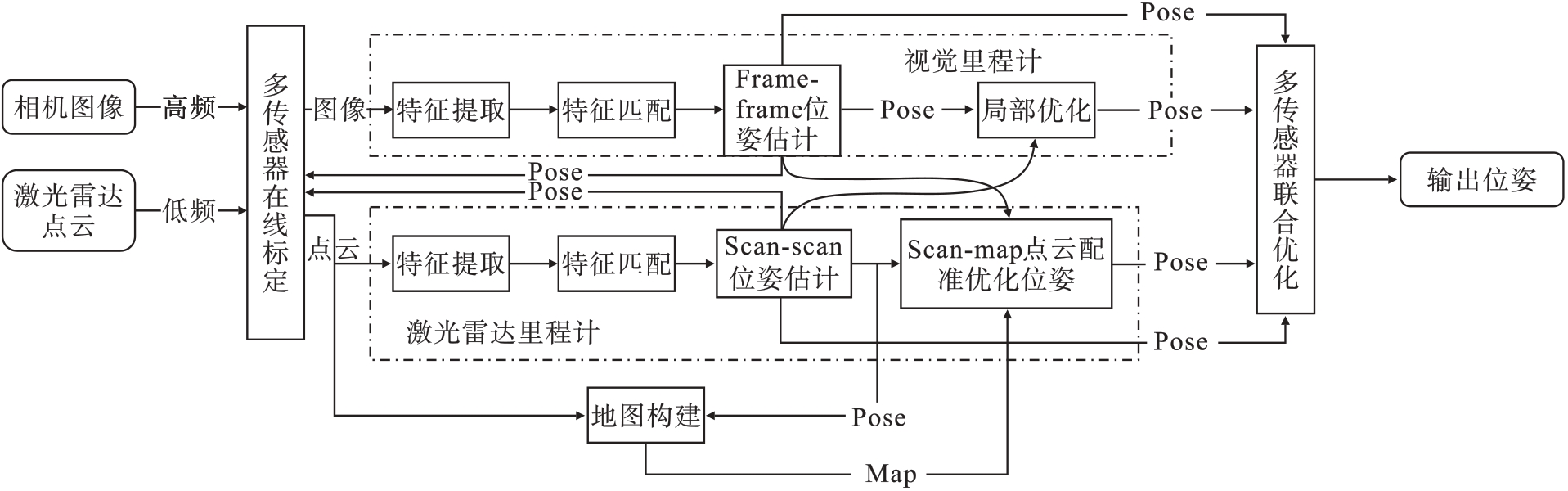
Fig. 1 Framework of multi?sensor fusion positioning algorithm
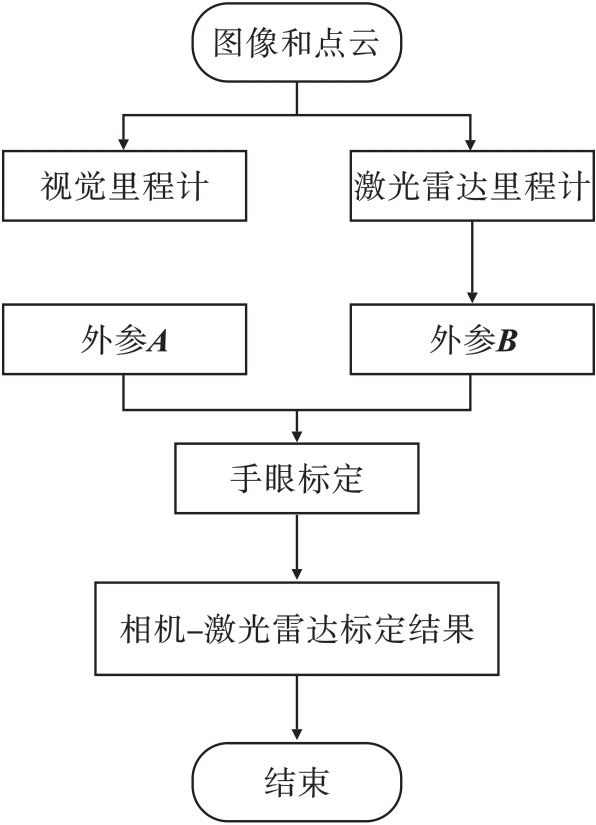
Fig. 2 Flow chart of hand?eye calibration program

Fig. 3 ORB feature points
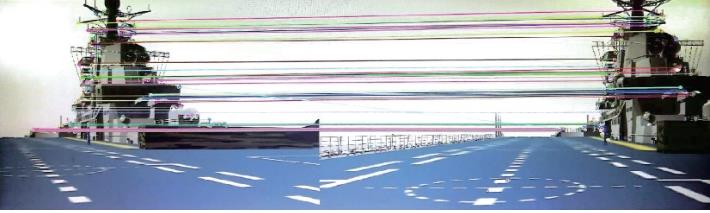
Fig. 4 Matching results of ORB feature points
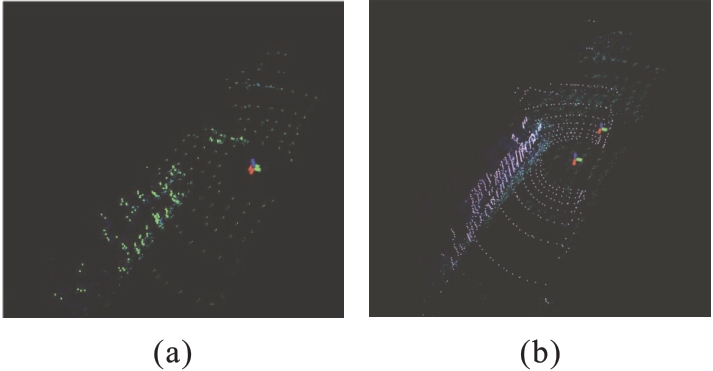
Fig. 5 Features of point clouds
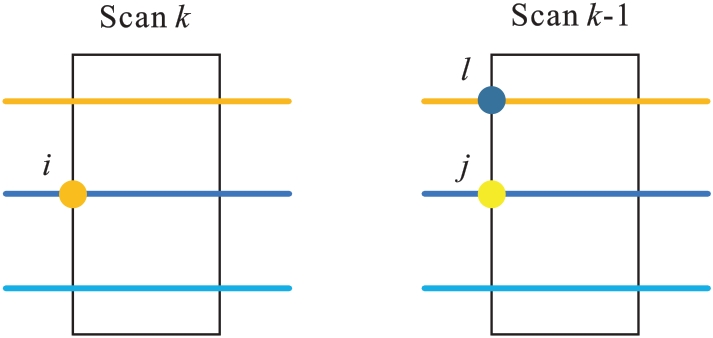
Fig. 6 Matching of edge features
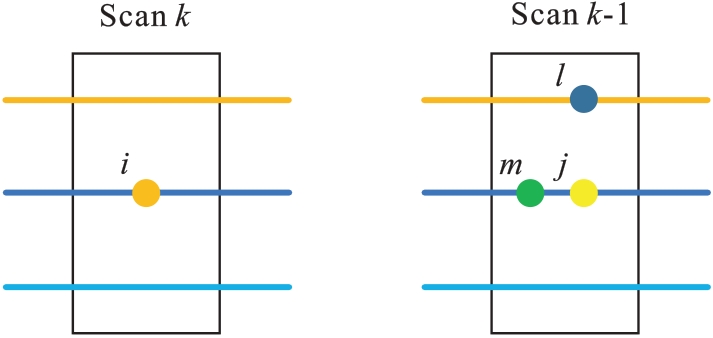
Fig. 7 Matching of planar features
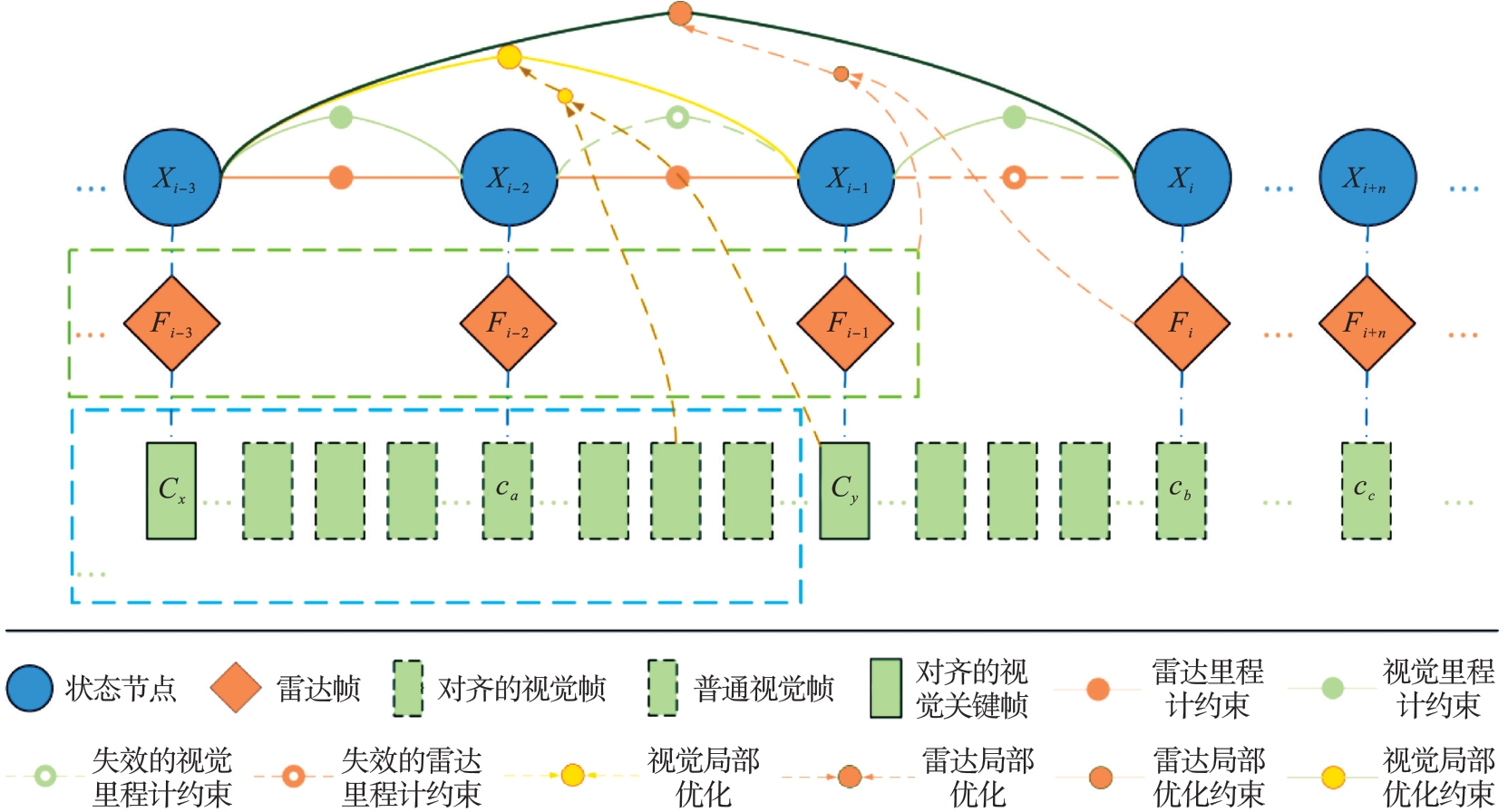
Fig. 8 Factor graph of joint optimization
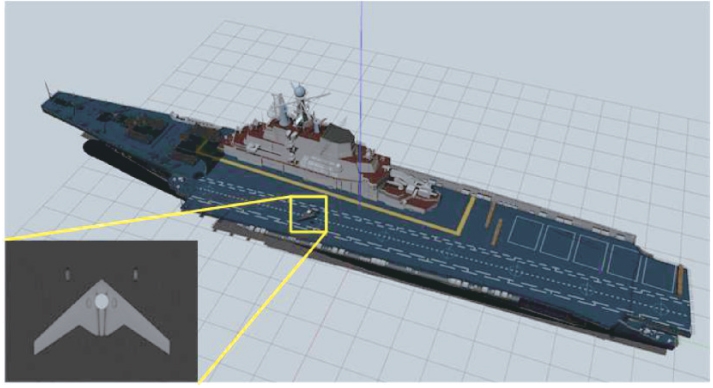
Fig. 9 Simulation of the ship’s surface environment
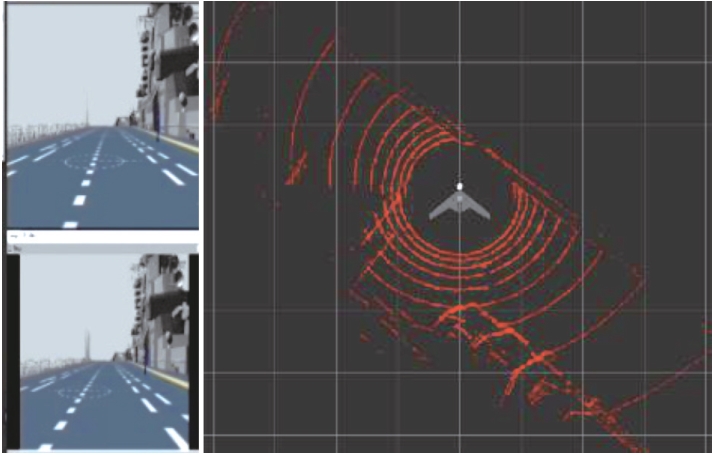
Fig. 10 Visualization effect of sensor observation
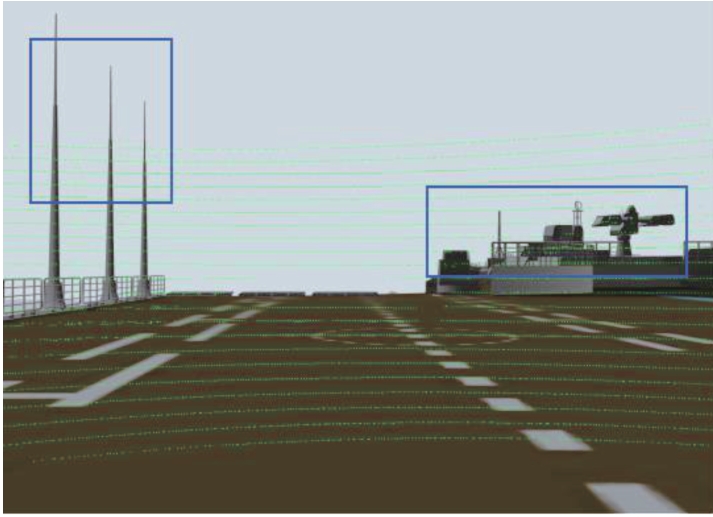
Fig. 11 Calibration results of simulation system
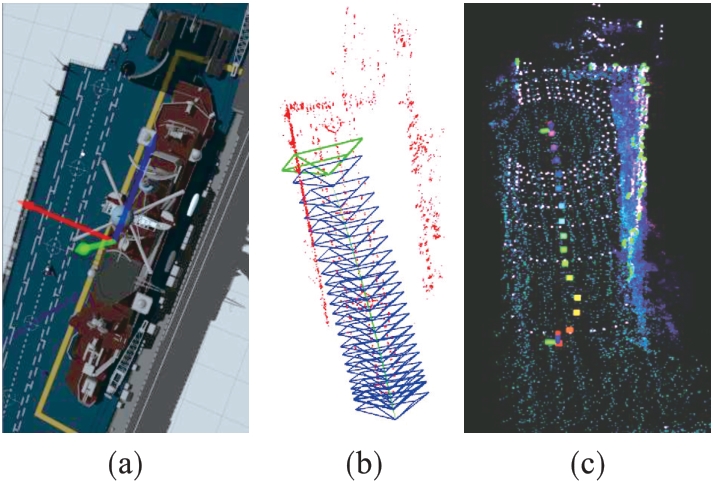
Fig. 12 Fusion algorithm for visual and lidar pose
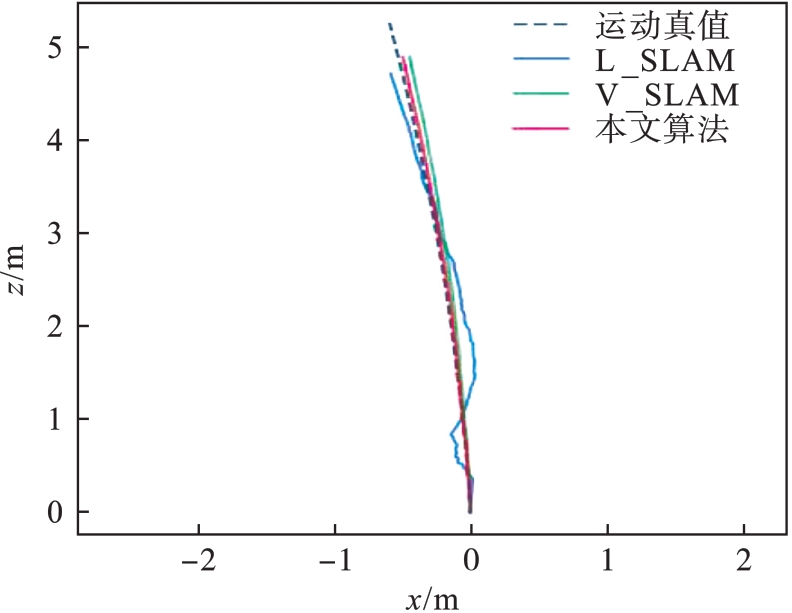
Fig. 13 Pose evaluation of multi?sensor fusion localization algorithm
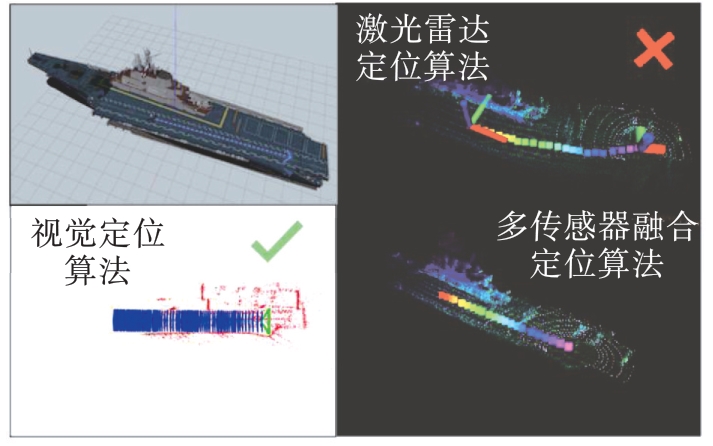
Fig. 14 Comparison of positioning effect
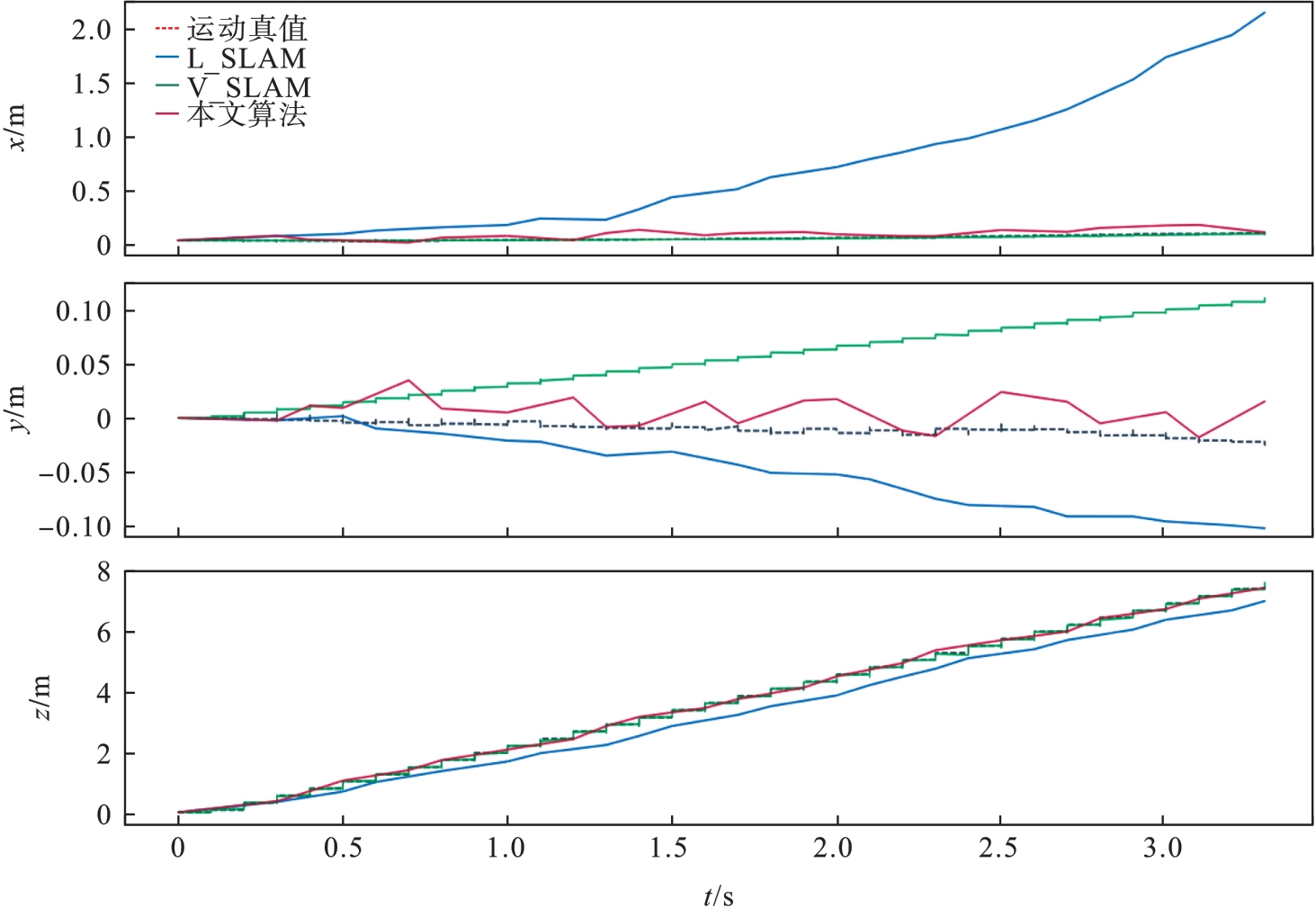
Fig. 15 Pose correction effect
| 1 | Shan T X, Englot B.LeGO‑LOAM:lightweight and ground‑optimized lidar odometry and mapping on variable terrain[C]//2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS).Madrid,2018:4758-4765. |
| 2 | Mur‑Artal R, Montiel J M M, Tardós J D.ORB‑SLAM:a versatile and accurate monocular SLAM system[J].IEEE Transactions on Robotics,2015,31(5):1147-1163. |
| 3 | Shan T X, Englot B, Meyers D,et al.LIO‑SAM:tightly‑coupled lidar inertial odometry via smoothing and mapping[C]//2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS).Madrid,2020:5135-5142. |
| 4 | Mourikis A I, Roumeliotis S I.A multi‑state constraint Kalman filter for vision‑aided inertial navigation[C]//Proceedings 2007 IEEE International Conference on Robotics and Automation.Rome,2007:3565-3572. |
| 5 | Qin T, Li P L, Shen S J.VINS‑mono:a robust and versatile monocular visual‑inertial state estimator[J].IEEE Transactions on Robotics,2018,34(4):1004-1020. |
| 6 | Graeter J, Wilczynski A, Lauer M.LIMO:lidar‑monocular visual odometry[C]//2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS).Madrid,2018:7872-7879. |
| 7 | Pandey G, Savarese S, McBride J R,et al.Visually bootstrapped generalized ICP[C]//2011 IEEE International Conference on Robotics and Automation.Shanghai,2011:2660-2667. |
| 8 | Liang X, Chen H Y, Li Y J,et al.Visual laser‑SLAM in large‑scale indoor environments[C]//2016 IEEE International Conference on Robotics and Biomimetics (ROBIO).Qingdao,2016:19-24. |
| 9 | Zhu Z L, Yang S W, Dai H D,et al.Loop detection and correction of 3D laser‑based SLAM with visual information[C]//Proceedings of the 31st International Conference on Computer Animation and Social Agents.Beijing,2018:53-58. |
| 10 | Zuo X X, Geneva P, Lee W,et al.LIC‑fusion:Lidar‑inertial‑ |
| camera odometry[C]//2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS).Madrid,2019:5848-5854. | |
| 11 | Rublee E, Rabaud V, Konolige K,et al.ORB:an efficient alternative to SIFT or SURF[C]//2011 International Conference on Computer Vision.Barcelona,2011:2564-2571. |
| 12 | Rosten E, Drummond T.Machine learning for high‑speed corner detection[M].Berlin:Springer,2006:430-443. |
| 13 | Calonder M, Lepetit V, Strecha C,et al.BRIEF:binary robust independent elementary features[C]//European Conference on Computer Vision.Heidelberg:Springer,2010:778-792. |
| [1] | LUO Zhong, SUN Yong-hang, GE Chang-chuang, XU Chun-yang. Fluid-Solid-Thermal Coupling Characteristics of Ejector Valve Adjusting Structure [J]. Journal of Northeastern University(Natural Science), 2021, 42(1): 75-82. |
| [2] | WANG Yu-bao, WANG Liang, CHENG Sen-hao, HU Zhan-feng. Study on Frost Heave Resistance of Different Section Structures of U-Shaped Canal [J]. Journal of Northeastern University Natural Science, 2020, 41(9): 1341-1347. |
| [3] | MA Hui, FU Qiang, LI Kun, FAN Fu-you. Natural Characteristics Analysis of Suspended Thin-Walled Cylindrical Shells with Bolted Connections [J]. Journal of Northeastern University Natural Science, 2020, 41(5): 686-692. |
| [4] | LUO Zhong, ZHANG Yong-qiang, ZHU Yun-peng, LI Chao-shuai. Design of Distortion Similar Model for Thin-Walled Conical Shell and Method for Determining Geometric Interval [J]. Journal of Northeastern University Natural Science, 2019, 40(11): 1600-1605. |
| [5] | YAN Yu-tao, WANG Shuang, HU Guang-yang, ZHANG Li-jing. Effect of Deflection Angles on Structural Characteristics of Circumferential Sealing and Leakage [J]. Journal of Northeastern University Natural Science, 2019, 40(10): 1454-1461. |
| [6] | LUO Zhong, ZHOU Yi-fu, BIAN Zi-fang, WANG Fei. Influence of Nonlinearity Factors of Rolling Bearings on Vibration Characteristics of Rotor System [J]. Journal of Northeastern University Natural Science, 2019, 40(8): 1131-1138. |
| [7] | LIU Yu, HE Feng-xia. Research on the Influencing Factors of Robot Milling Stability [J]. Journal of Northeastern University Natural Science, 2019, 40(7): 991-996. |
| [8] | LIU Yu, HE Feng-xia. Study On the Chatter Stability of Robotic Milling Based on the Probability Method [J]. Journal of Northeastern University Natural Science, 2019, 40(5): 683-687. |
| [9] | LI Yu-qi, LUO Zhong, LI Jiang, HOU Xiao-jie. Analysis of Bolted Joint Rotor System with Uncertain Axial Stiffness [J]. Journal of Northeastern University Natural Science, 2019, 40(5): 700-705. |
| [10] | LI Ming, SHI Yi-tao, LI Xin, LIANG Li. 3D Modeling for Heterogeneous Rock Based on LSM and Characteristics of Hydraulic Fracture Propagation [J]. Journal of Northeastern University Natural Science, 2019, 40(1): 109-114. |
| [11] | WEN Zhe-nan, ZHANG Ying-li, BA De-chun, YUE Xiang-ji. Optimization Method for the Runner Crown Shape of a Low Specific Speed Francis Turbine [J]. Journal of Northeastern University Natural Science, 2018, 39(6): 839-843. |
| [12] | JIN Yan, LIU Shao-jun. Fatigue Reliability Analysis of Aviation Bearings Based on ANN [J]. Journal of Northeastern University Natural Science, 2018, 39(6): 850-855. |
| [13] | SUN Wei, FAN Yun-fei. Quantitative Measurement of Vibration Localization of Blisk with Damping Coating Based on Experimental Mode [J]. Journal of Northeastern University Natural Science, 2018, 39(5): 679-683. |
| [14] | JIA Peng, QIN Bing, WANG Liang, LIU Zhi-chao. Toroidal Fracturing Mode in Surrounding Rock Mass and Its Impact Factors Under High Axial Stress [J]. Journal of Northeastern University Natural Science, 2018, 39(4): 564-569. |
| [15] | ZHOU Lai-hong, DOU Jing-xin, ZHANG Ju-qian, WEN Bang-chun. Trajectory Tracking Control for a Quadrotor UAV Based on Improved Backstepping [J]. Journal of Northeastern University Natural Science, 2018, 39(1): 66-70. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||