Journal of Northeastern University(Natural Science) ›› 2024, Vol. 45 ›› Issue (8): 1123-1134.DOI: 10.12068/j.issn.1005-3026.2024.08.008
• Mechanical Engineering • Previous Articles Next Articles
Chuan-yin TANG1, Lyu PAN1, Jing-hong LI2, Ming-li ZHANG1
Received:2023-03-29
Online:2024-08-15
Published:2024-11-12
CLC Number:
Chuan-yin TANG, Lyu PAN, Jing-hong LI, Ming-li ZHANG. Vehicle Path Tracking Control Considering Stability Boundaries and Roll Stability[J]. Journal of Northeastern University(Natural Science), 2024, 45(8): 1123-1134.
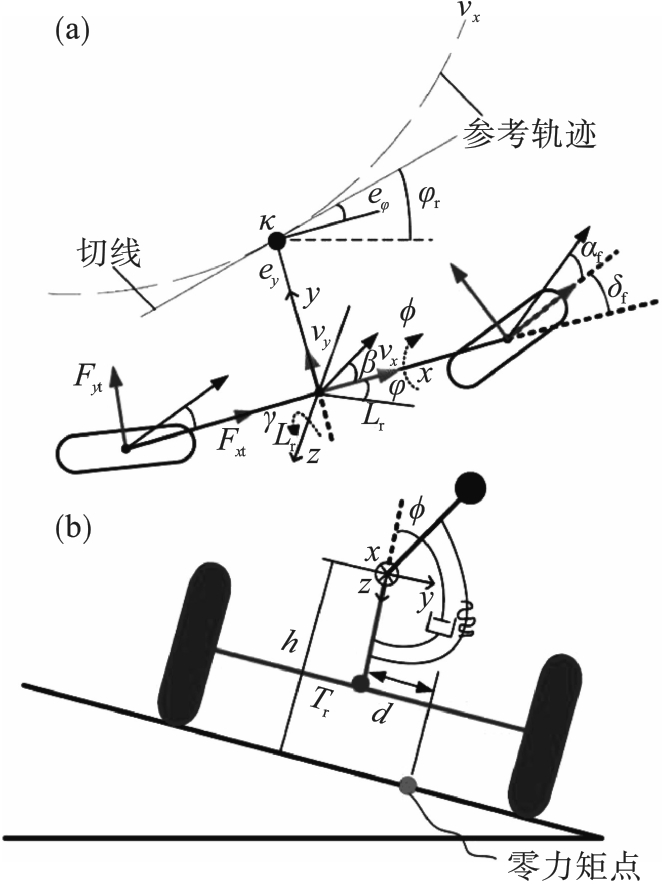
Fig. 1 Vehicle dynamics model
| 参数 | 数值 |
|---|---|
| 整车质量m/kg | 1 760 |
| 簧上质量 | 1 598 |
| 质心高度 | 0.6 |
| 轮距 | 1.6 |
| 悬架侧倾刚度 | 145 330 |
| 悬架侧倾阻尼 | 4 500 |
| 前轴到质心的距离 | 1.4 |
| 后轴到质心的距离 | 1.6 |
| 后轮侧偏刚度 | |
| 前轮侧偏刚度 | |
| x轴转动惯量 | |
| z轴转动惯量 | 1 636 |
Table 1 Basic vehicle parameters
| 参数 | 数值 |
|---|---|
| 整车质量m/kg | 1 760 |
| 簧上质量 | 1 598 |
| 质心高度 | 0.6 |
| 轮距 | 1.6 |
| 悬架侧倾刚度 | 145 330 |
| 悬架侧倾阻尼 | 4 500 |
| 前轴到质心的距离 | 1.4 |
| 后轴到质心的距离 | 1.6 |
| 后轮侧偏刚度 | |
| 前轮侧偏刚度 | |
| x轴转动惯量 | |
| z轴转动惯量 | 1 636 |
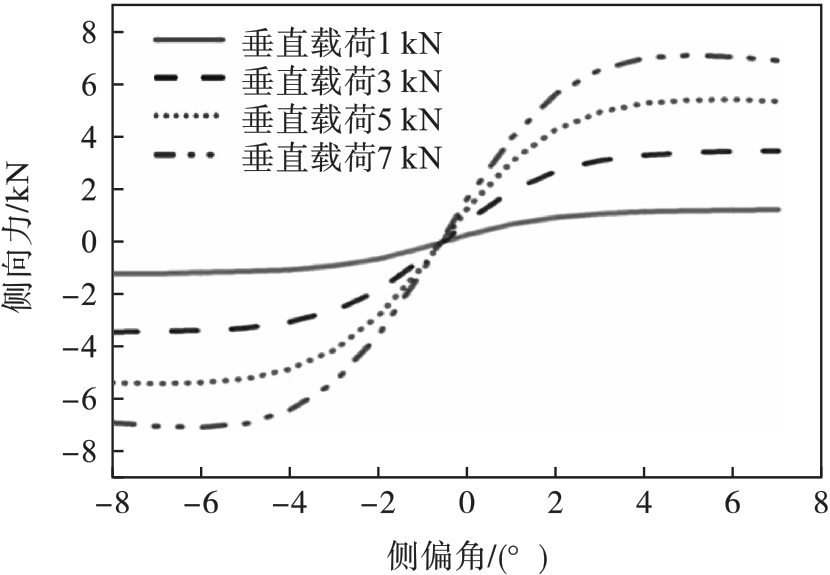
Fig. 2 Relationship between tire lateral force and sideslip angle
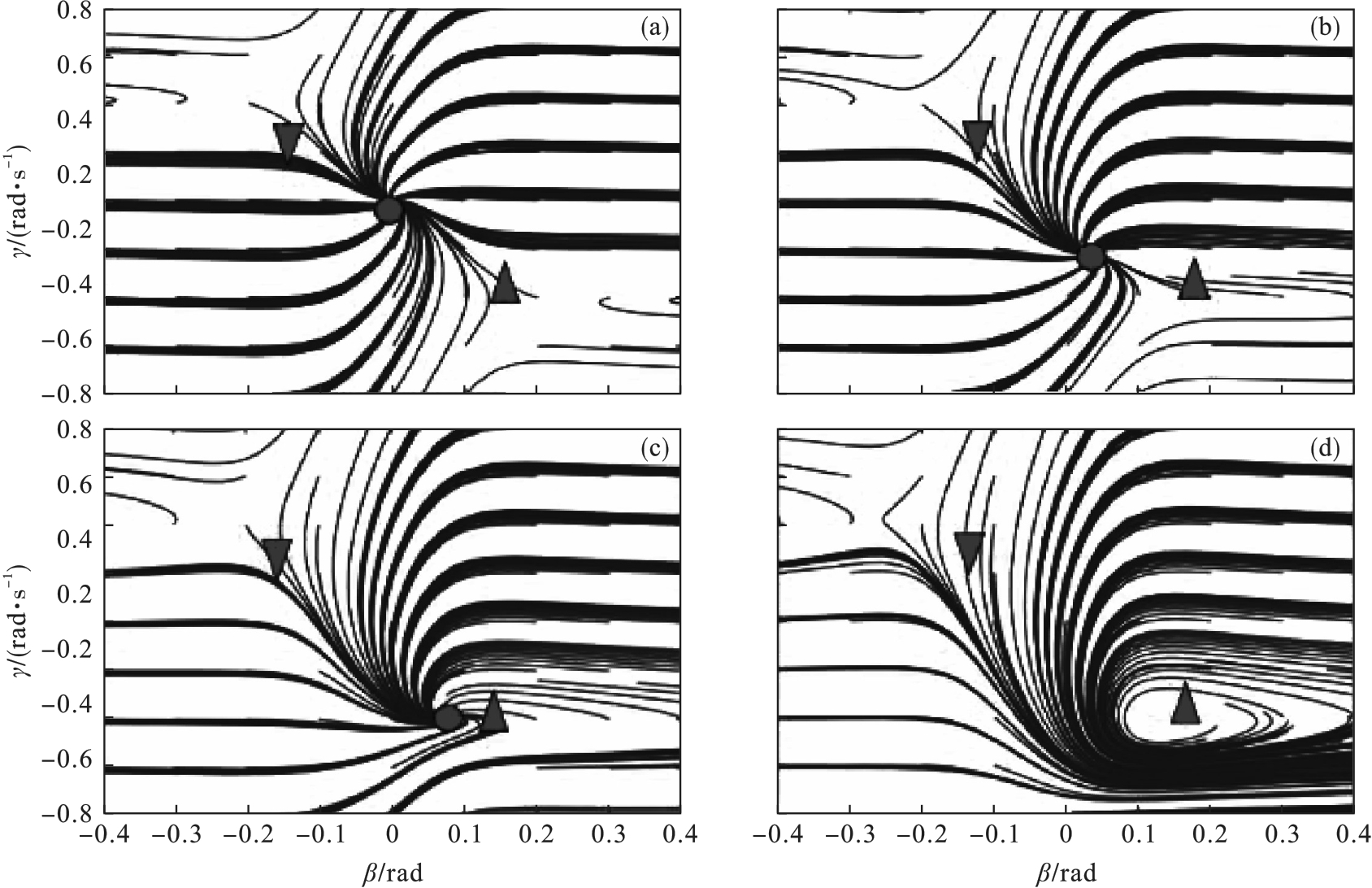
Fig. 3 Phase plan under different front wheel angles
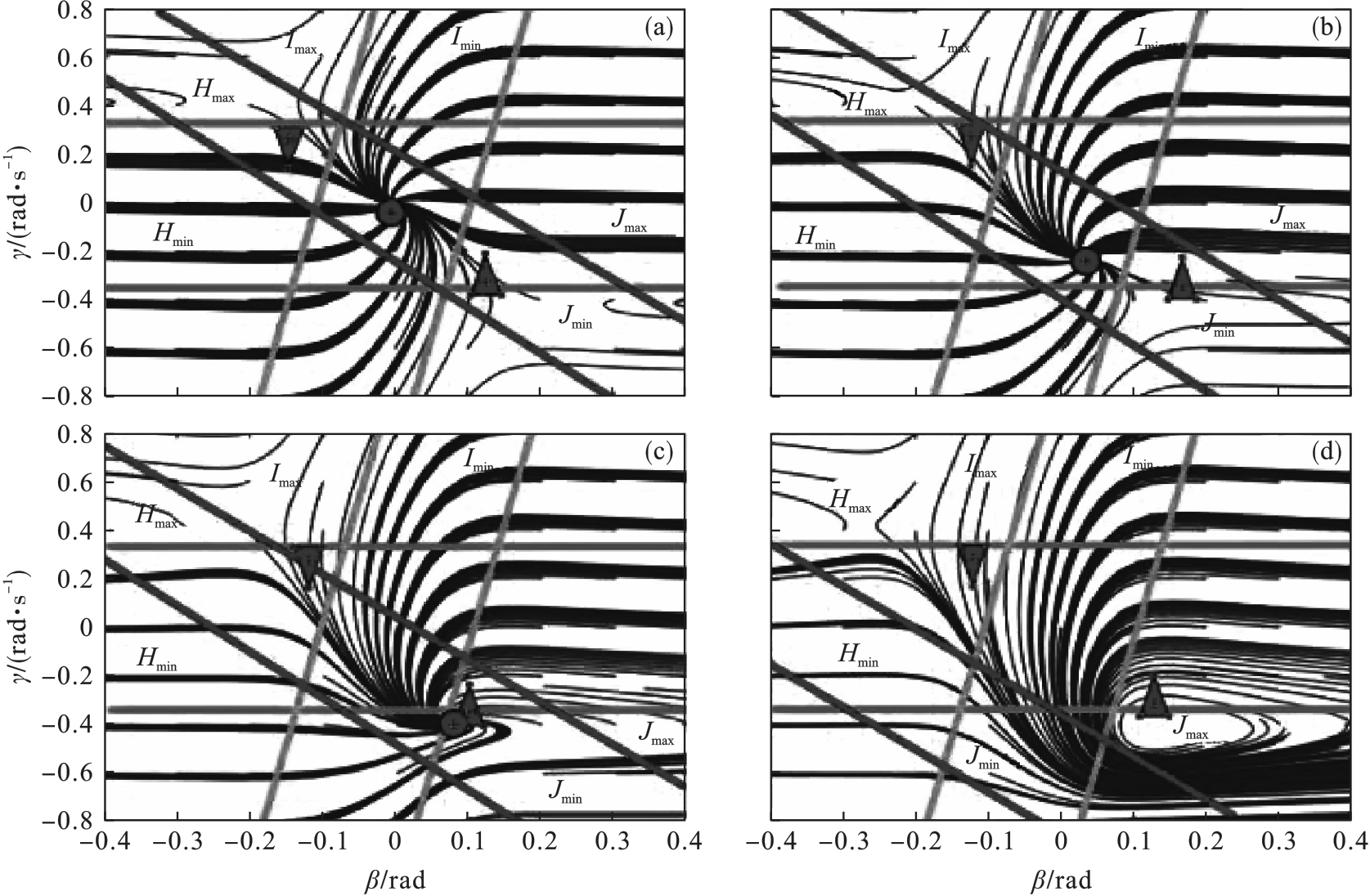
Fig. 4 Stability boundary under different front wheel angles at 27 m/s
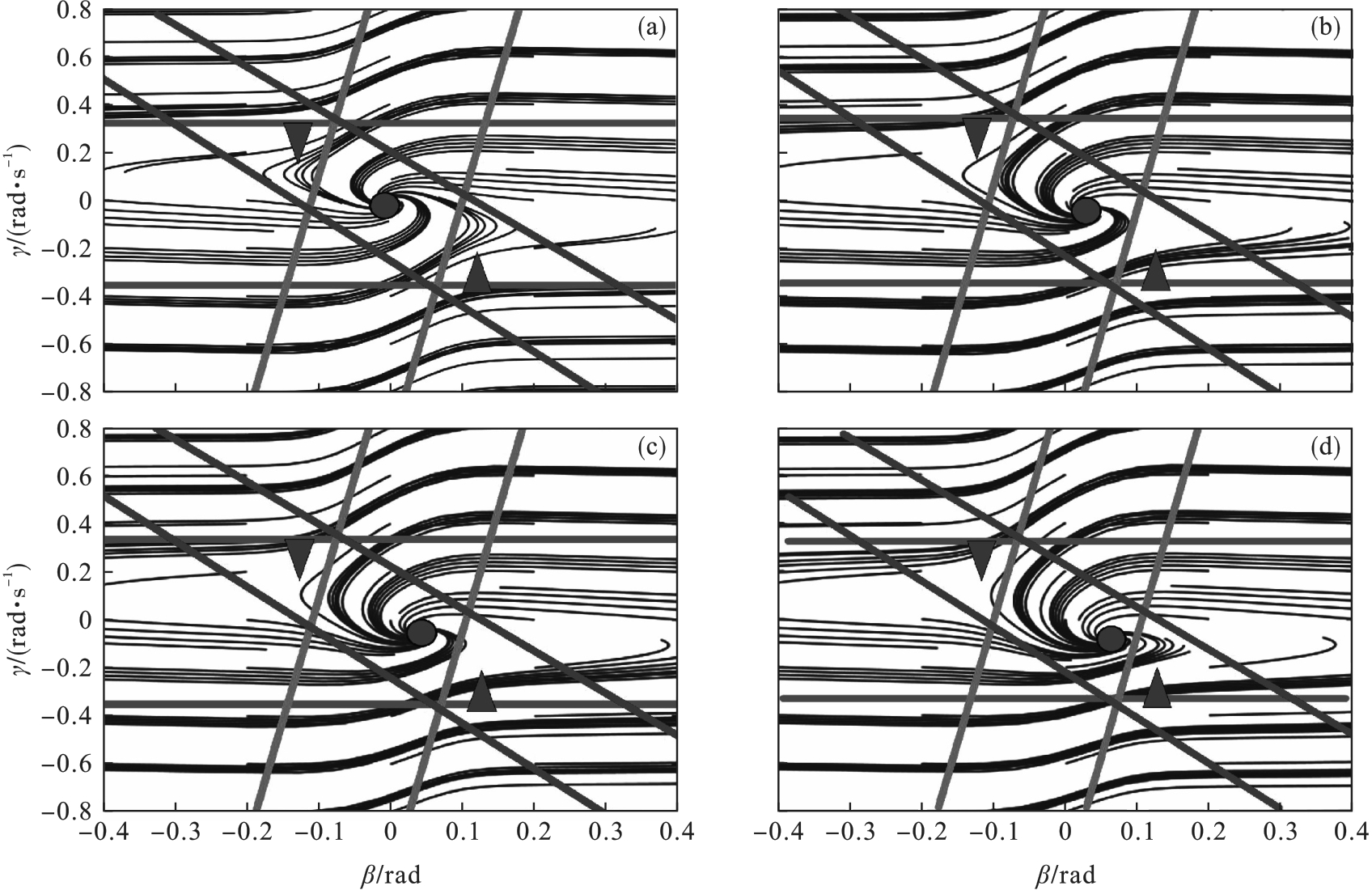
Fig. 5 Stability boundary under different front wheel angles at 22 m/s
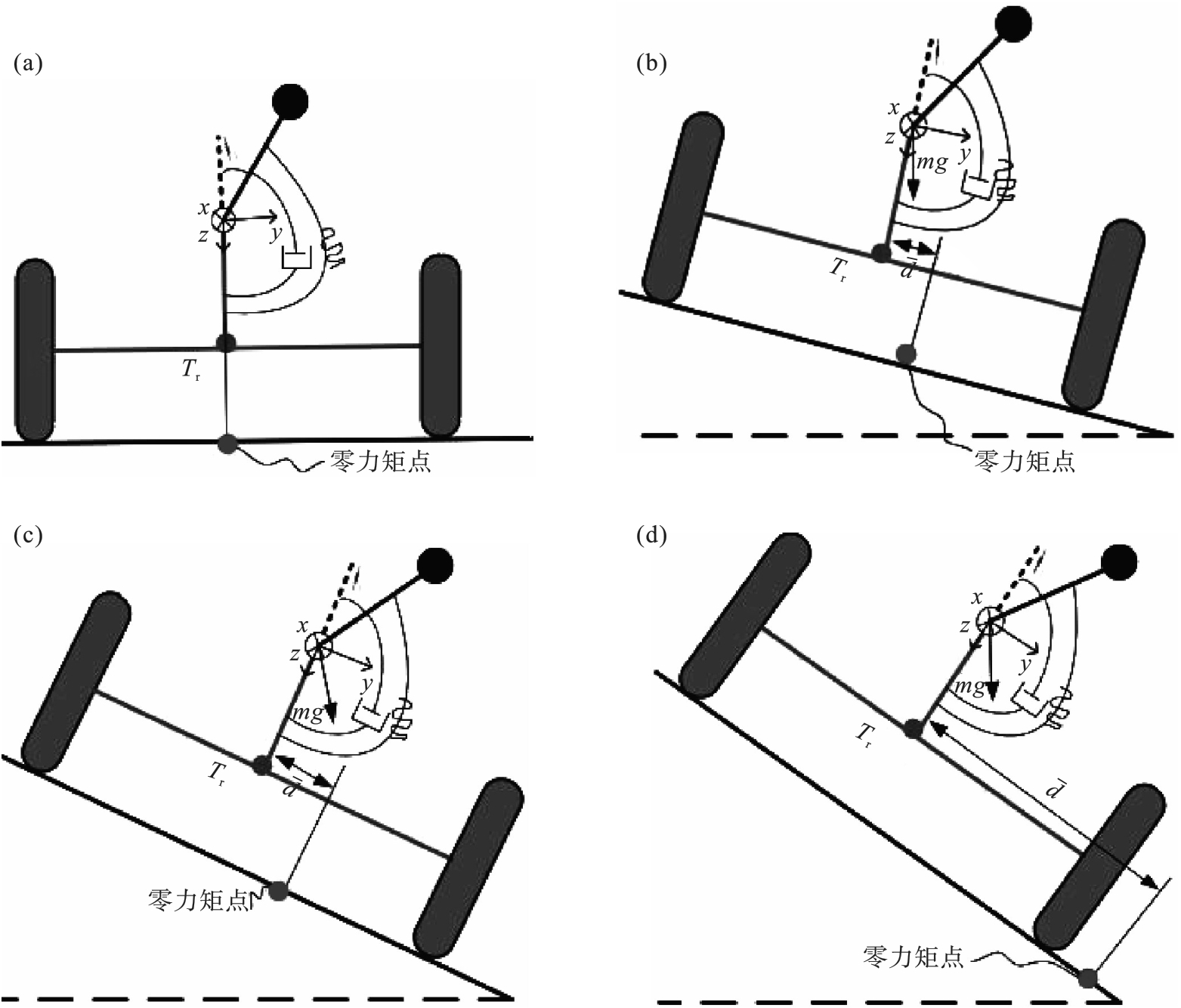
Fig. 6 Schematic diagram of the zero?moment point
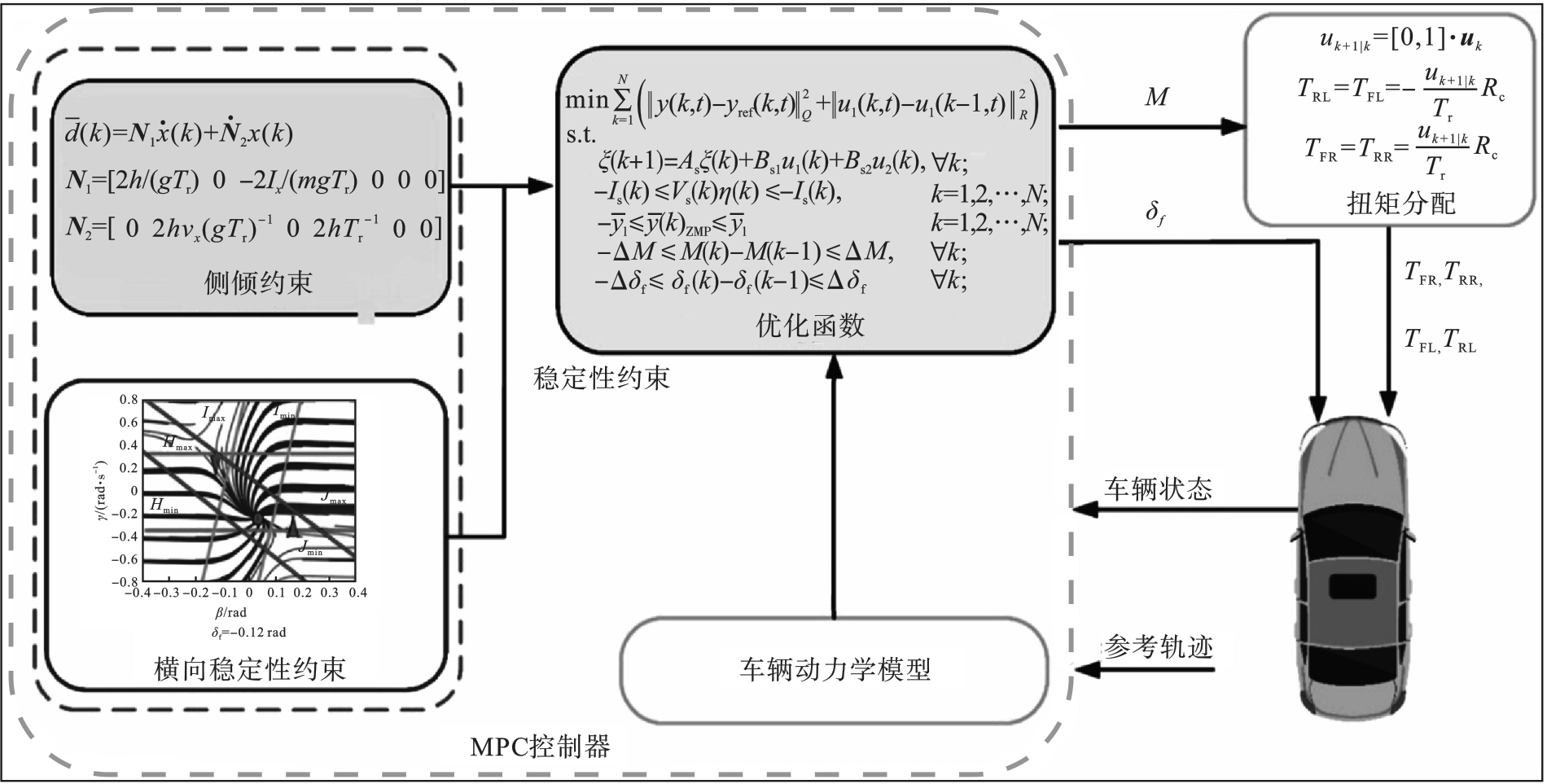
Fig. 7 Model predictive controller framework
| 参数 | 数值 |
|---|---|
| 预测时域长度 | 15 |
| 离散步长/s | |
| 前轮转角最大变化率 | |
| 前轮最大转角 | |
| 最大附加横摆力矩 | |
| 附加横摆力矩最大变化率 |
Table 2 Basic parameters of the controller
| 参数 | 数值 |
|---|---|
| 预测时域长度 | 15 |
| 离散步长/s | |
| 前轮转角最大变化率 | |
| 前轮最大转角 | |
| 最大附加横摆力矩 | |
| 附加横摆力矩最大变化率 |

Fig. 8 Steering wheel angle during J?turn operation
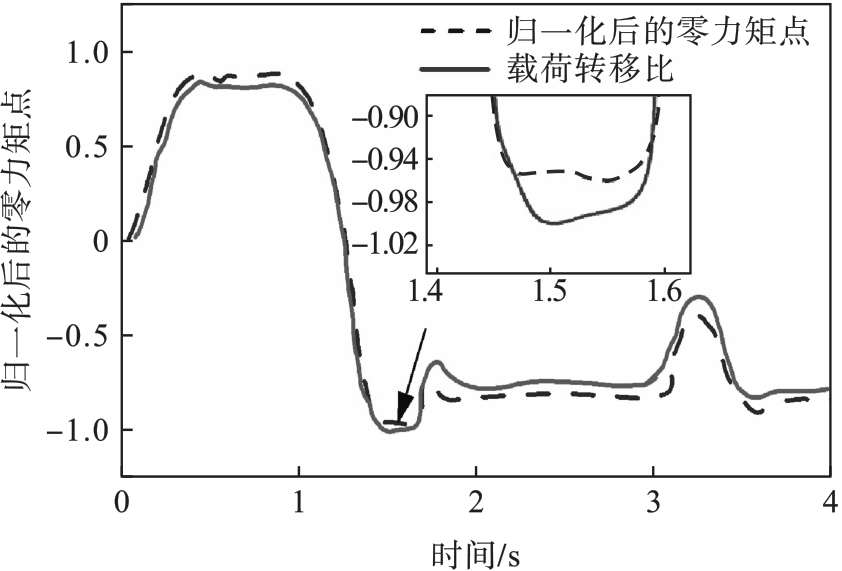
Fig. 9 Comparison between the zero moment point and tire load ratio
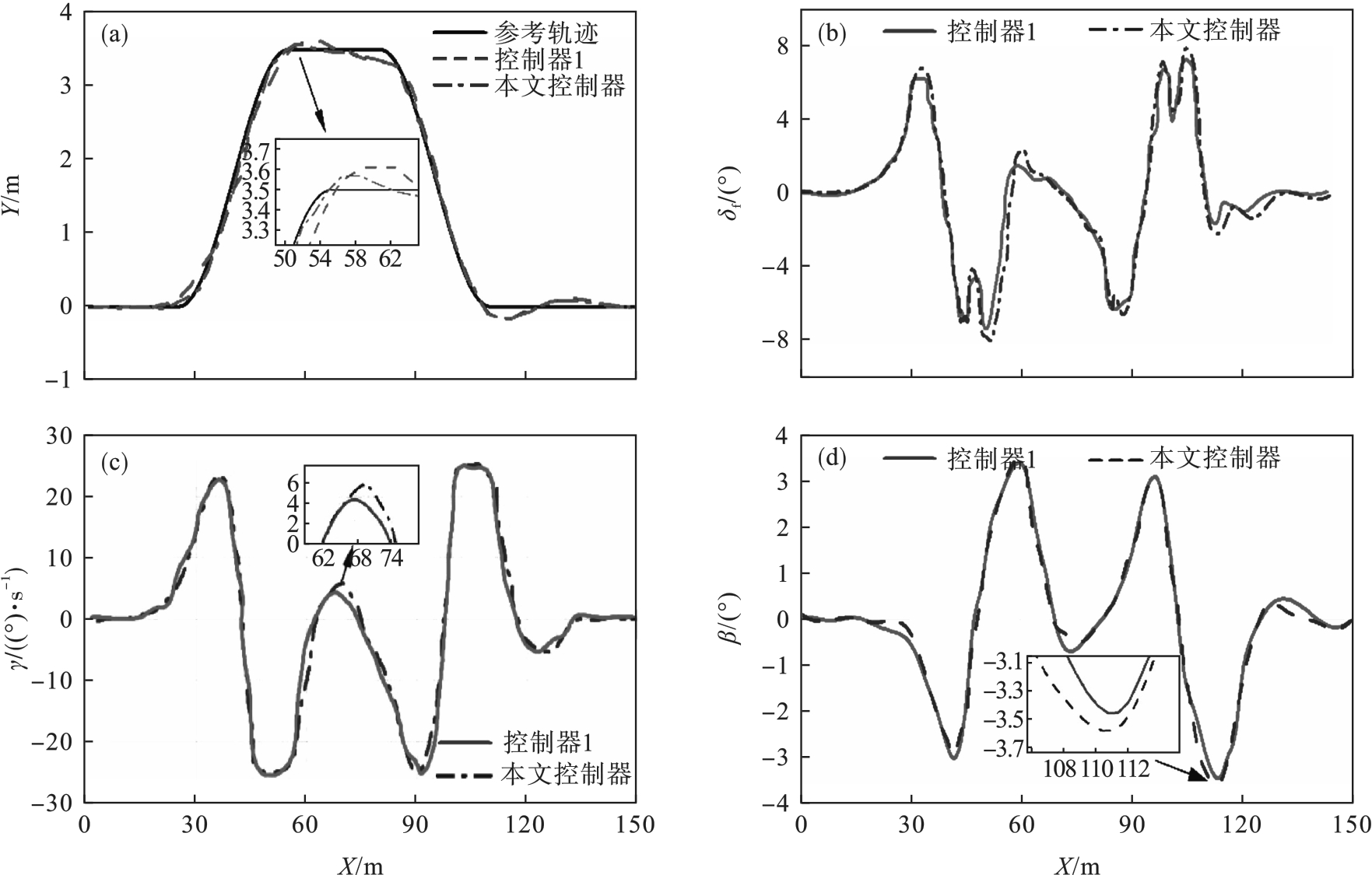
Fig. 10 Comparison curves of simulation results
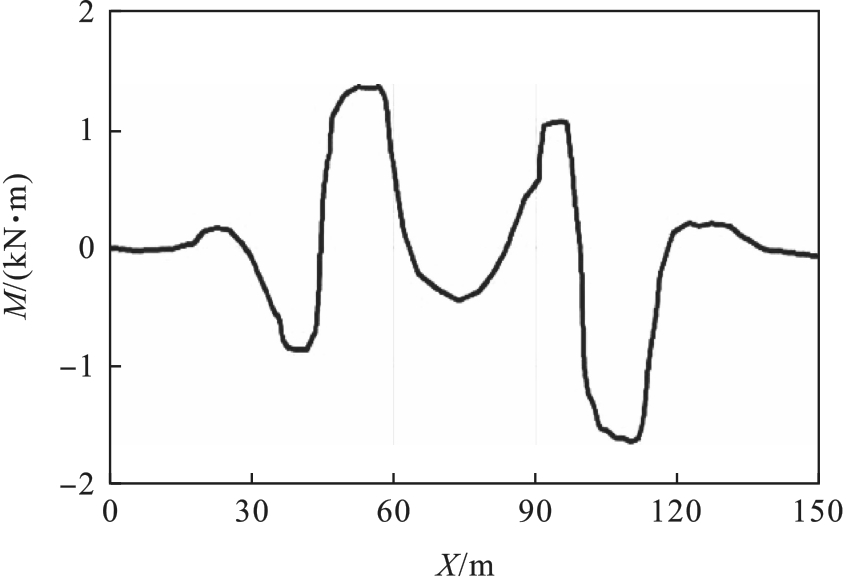
Fig.11 Additional yaw moment
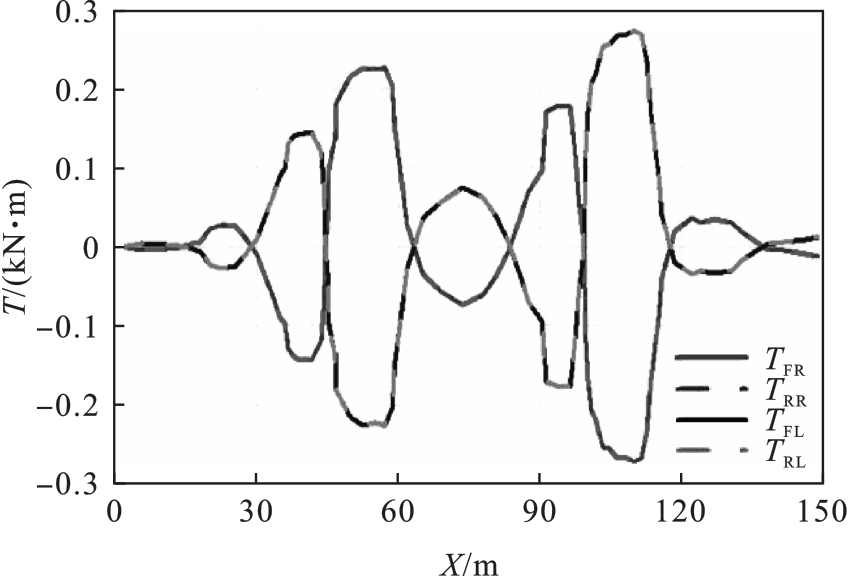
Fig.12 Motor torque distribution
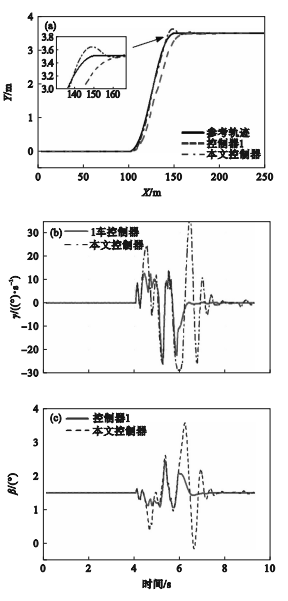
Fig. 13 Simulation results for high?speed lane changes
Fig. 14 Simulation results under complex road
| 1 | Falcone P, Borrelli F, Asgari J,et al.Predictive active steering control for autonomous vehicle systems[J].IEEE Transactions on Control Systems Technology,2007,15(3):566-580. |
| 2 | Tjonnas J, Johansen T A.Stabilization of automotive vehicles using active steering and adaptive brake control allocation[J].IEEE Transactions on Control Systems Technology,2010,18(3):545-558. |
| 3 | Zhang W L, Wang Z P, Drugge L,et al.Evaluating model predictive path following and yaw stability controllers for over‑actuated autonomous electric vehicles[J].IEEE Transactions on Vehicular Technology,2020,69(11):12807-12821. |
| 4 | Tian Y, Yao Q Q, Hang P,et al. Adaptive coordinated path tracking control strategy for autonomous vehicles with direct yaw moment control[J].Chinese Journal of Mechanical Engineering,2022,35(1):234-248. |
| 5 | Ren B T, Chen H, Zhao H Y,et al.MPC‑based yaw stability control in in‑wheel‑motored EV via active front steering and motor torque distribution[J].Mechatronics,2016,38:103-114. |
| 6 | Samsundar J, Huston J C.Estimating lateral stability region of a nonlinear 2 degree‑of‑freedom vehicle[J].SAE Transactions,1998,107:1791-1797. |
| 7 | Bobier‑Tiu C G, Beal C E, Kegelman J C,et al.Vehicle control synthesis using phase portraits of planar dynamics[J].Vehicle System Dynamics,2019,57(9):1318-1337. |
| 8 | Cui Q J, Ding R J, Wei C F,et al.Path‑tracking and lateral stabilisation for autonomous vehicles by using the steering angle envelope[J].Vehicle System Dynamics,2021,59(11):1672-1696. |
| 9 | Parida N C, Raha S, Ramani A.Rollover‑preventive force synthesis at active suspensions in a vehicle performing a severe maneuver with wheels lifted off[J].IEEE Transactions on Intelligent Transportation Systems,2014,15(6):2583-2594. |
| 10 | Stankiewicz P G, Brown A A, Brennan S N.Preview horizon analysis for vehicle rollover prevention using the zero‑moment point[J].Journal of Dynamic Systems Measurement and Control—Transactions of the ASME,2015,137(9):091002. |
| 11 | 吴西涛,魏超,翟建坤,等.考虑横摆稳定性的无人车轨迹跟踪控制优化研究[J].机械工程学报,2022,58(6):130-142. |
| Wu Xi‑tao, Wei Chao, Zhai Jian‑kun,et al.Study on the optimization of autonomous vehicle on path‑following considering yaw stability[J].Chinese Journal of Mechanical Engineering,2022,58(6):130-142. | |
| 12 | 刘凯,龚建伟,陈舒平,等.高速无人驾驶车辆最优运动规划与控制的动力学建模分析[J].机械工程学报,2018,54(14):141-151. |
| Liu Kai, Gong Jian‑wei, Chen Shu‑ping,et al.Dynamic modeling analysis of optimal motion planning and control for high‑speed self‑driving vehicles[J].Chinese Journal of Mechanical Engineering,2018,54(14):141-151. | |
| 13 | Erlien S M, Fujita S, Gerdes J C.Shared steering control using safe envelopes for obstacle avoidance and vehicle stability[J].IEEE Transactions on Intelligent Transportation Systems,2016,17(2):441-451. |
| 14 | 路宏广,赵树恩.基于鲁棒模型预测的智能汽车轨迹跟踪控制研究[J].系统仿真学报,2022,34(1):153-162. |
| Lu Hong‑guang, Zhao Shu‑en.research on intelligent vehicle trajectory tracking control based on robust model prediction[J].Journal of System Simulation,2022,34(1):153-162. | |
| 15 | 冷姚,赵树恩.智能车辆横向轨迹跟踪的显式模型预测控制方法[J].系统仿真学报,2021,33(5):1177-1187. |
| Leng Yao, Zhao Shu‑en.Explicit model predictive control for intelligent vehicle lateral trajectory tracking[J].Journal of System Simulation,2021,33(5):1177-1187. | |
| 16 | 张志达,郑玲,张紫微,等.基于自适应模型预测的智能汽车横向轨迹跟踪控制[J].中国公路学报,2022,35(7):305-316. |
| Zhang Zhi‑da, Zheng Ling, Zhang Zi‑wei,et al.Lateral trajectory tracking control of intelligent vehicles based on adaptive model prediction[J].China Journal of Highway and Transport,2022,35(7):305-316. | |
| 17 | Peng H N, Wang W D, An Q,et al.Path tracking and direct yaw moment coordinated control based on robust MPC with the finite time horizon for autonomous independent‑drive vehicles[J].IEEE Transactions on Vehicular Technology,2020,69(6):6053-6066. |
| 18 | 龚建伟,姜岩,徐威.无人驾驶车辆模型预测控制[M].北京:北京理工大学出版社,2014. |
| Gong Jian‑wei, Jiang Yan, Xu Wei.Model predictive control for self‑driving vehicles[M].Beijing:Beijing Institute of Technology Press,2014. | |
| 19 | Wang P, Liu Z Y, Liu Q F,et al.An MPC‑based manoeuvre stability controller for full drive‑by‑wire vehicles[J].Control Theory and Technology,2019,17(4):357-366. |
| 20 | 孙银健.基于模型预测控制的无人驾驶车辆轨迹跟踪控制算法研究[D].北京:北京理工大学,2015. |
| Sun Yin‑jian.Research on model predictive control‑based trajectory tracking algorithm for unmanned vehicles[D].Beijing:Beijing Institute of Technology,2015. |
| [1] | Hong-wei WANG, Lei LI, Chen-yu LIU, Xun WANG. Steering Actuator Fault Diagnosis of Intelligent Vehicle Based on Variable Parameter Model [J]. Journal of Northeastern University(Natural Science), 2024, 45(7): 913-920. |
| [2] | CHEN Long , LIU Qiao-bin, TAO Lei. Vehicle State Parameter Estimation Based on Graded Series Extended Kalman Filter Method [J]. Journal of Northeastern University(Natural Science), 2023, 44(8): 1144-1151. |
| [3] | LI Shou-tao, WEI Yu-bo, LI Qiu-yuan, YU Ding-li. MPC Stability Control Method Considering the Variation of Vehicle′s Cornering Stiffness [J]. Journal of Northeastern University(Natural Science), 2023, 44(2): 162-167. |
| [4] | TANG Chuan-yin, ZHAO Yi-feng, ZHAO Ya-feng, ZHOU Shu-wen. Research on the Trajectory Tracking Control Method of Intelligent Vehicles [J]. Journal of Northeastern University Natural Science, 2020, 41(9): 1297-1303. |
| [5] | LIANG Zhong-chao, ZHANG Huan, ZHAO Jing, WANG Yong-fu. Trajectory Tracking Control of Unmanned Vehicles Based on Adaptive MPC [J]. Journal of Northeastern University Natural Science, 2020, 41(6): 835-840. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||