Journal of Northeastern University(Natural Science) ›› 2025, Vol. 46 ›› Issue (2): 76-84.DOI: 10.12068/j.issn.1005-3026.2025.20230240
• Mechanical Engineering • Previous Articles Next Articles
Xiao-peng LI1,2( ), Xue-dong LI1, Xing FAN1, Bing SHI2
), Xue-dong LI1, Xing FAN1, Bing SHI2
Received:2023-08-18
Online:2025-02-15
Published:2025-05-20
Contact:
Xiao-peng LI
CLC Number:
Xiao-peng LI, Xue-dong LI, Xing FAN, Bing SHI. Analysis of Self-Balancing Mechanism of Transmission Line Inspection Robot Based on Fuzzy PID Control[J]. Journal of Northeastern University(Natural Science), 2025, 46(2): 76-84.
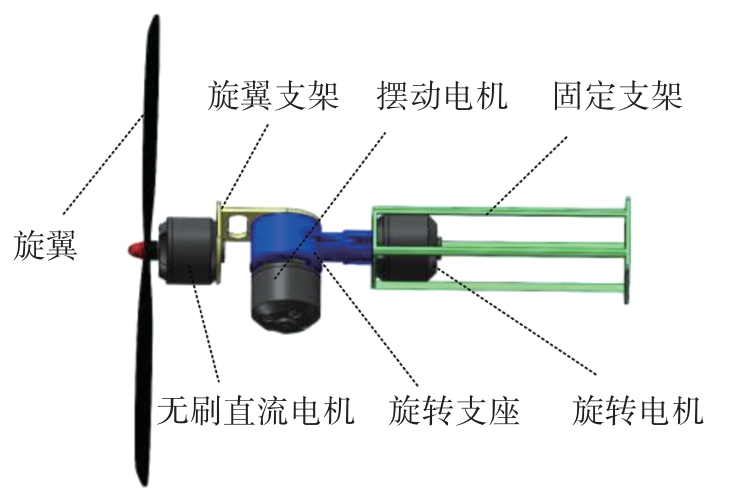
Fig. 1 Rotor system model
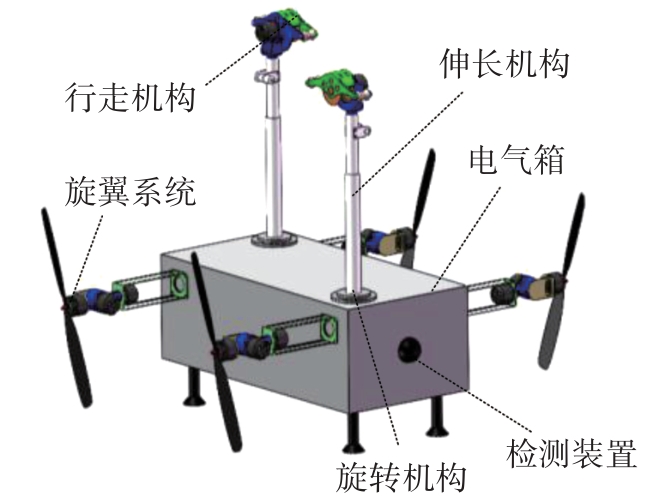
Fig. 2 Simplified model of the inspection robot
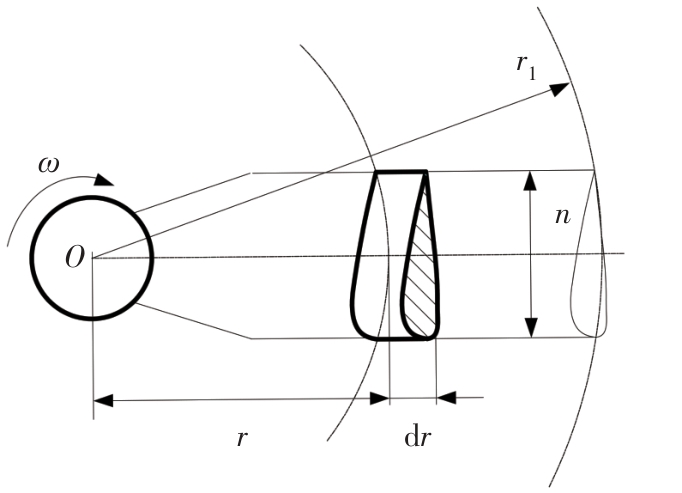
Fig. 3 Blade element on the rotor
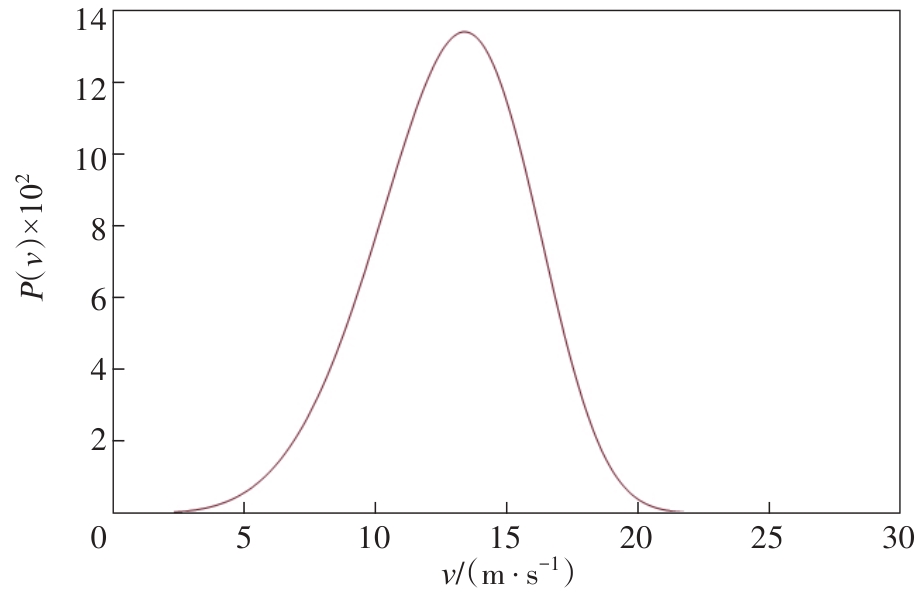
Fig. 4 Probability distribution of wind speed
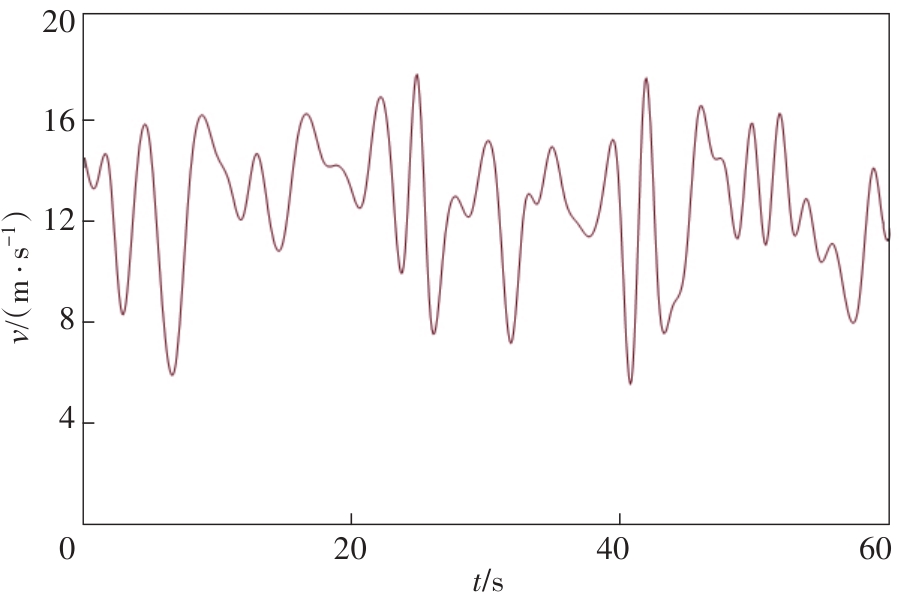
Fig. 5 Time schedule of wind speed
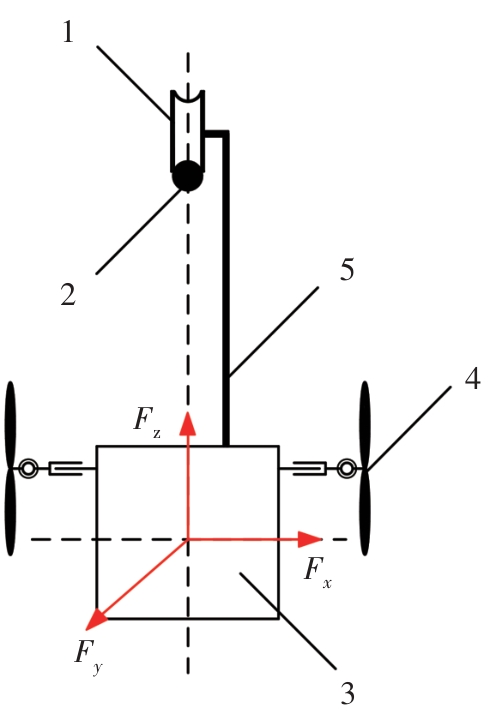
Fig. 6 Wind load diagram
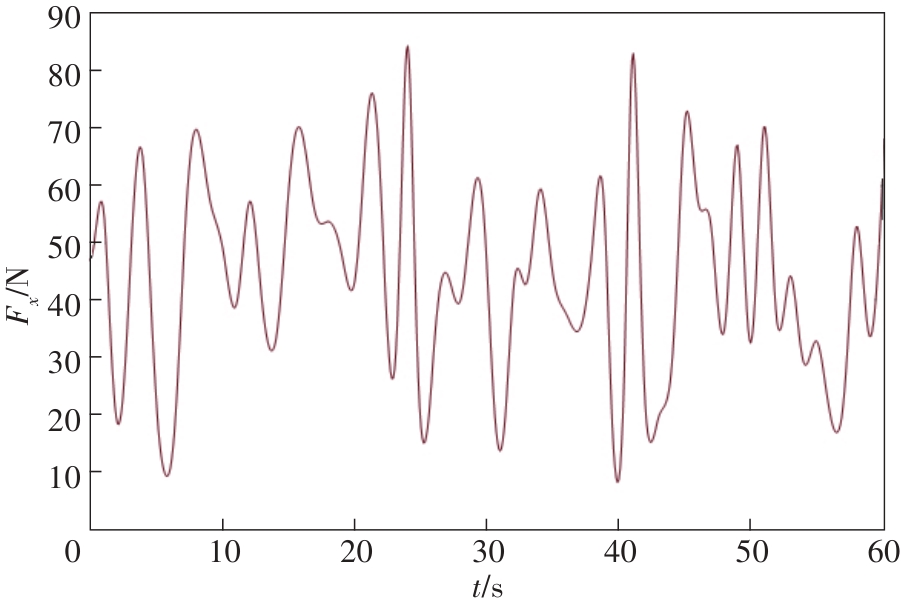
Fig. 7 Transverse wind load on the inspection robot
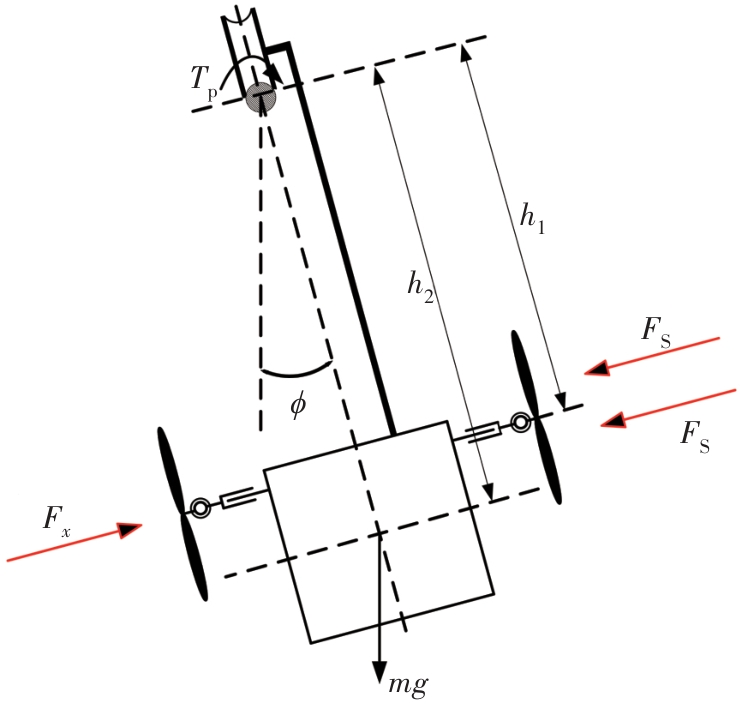
Fig. 8 Swing model of the inspection robot
| 参数 | 取值 |
|---|---|
| m/kg | 30 |
| h1/m | 0.5 |
| h2/m | 0.6 |
| c0/(N·s·m-1) | 10 |
| g/(m·s-2) | 9.8 |
Table 1 Parameters of the inspection robot
| 参数 | 取值 |
|---|---|
| m/kg | 30 |
| h1/m | 0.5 |
| h2/m | 0.6 |
| c0/(N·s·m-1) | 10 |
| g/(m·s-2) | 9.8 |
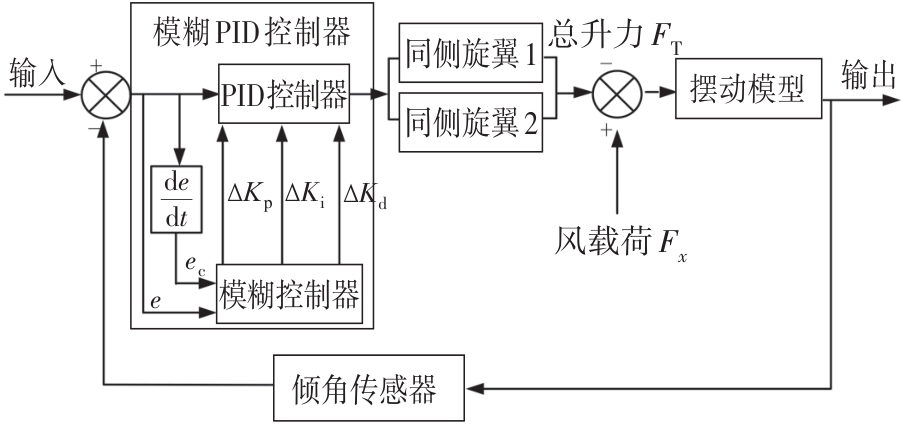
Fig. 9 Schematic diagram of fuzzy PID controler for the swing system
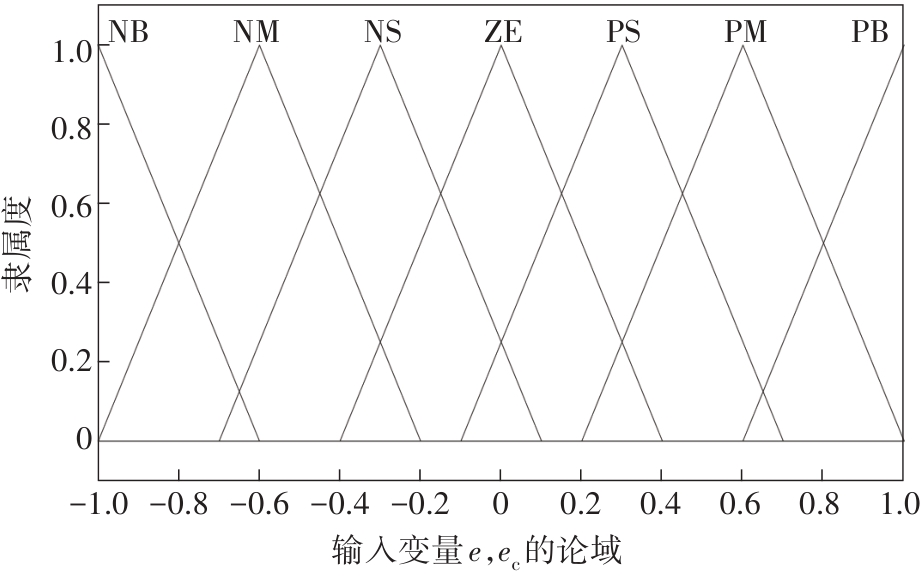
Fig. 10 Membership curves of the input variables
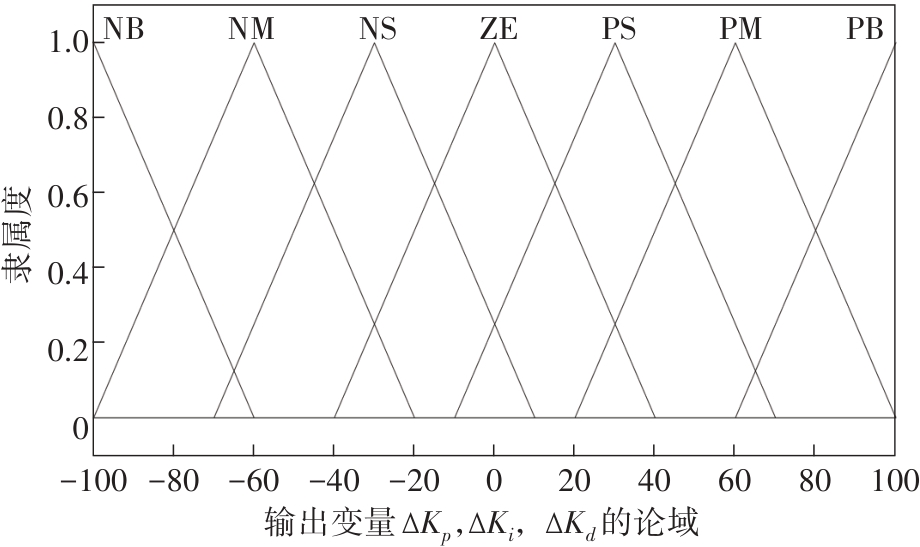
Fig. 11 Membership curves of the output variable
| 角度误差变化率ec | 角度误差e | ||||||
|---|---|---|---|---|---|---|---|
| NB | NM | NS | ZE | PS | PM | PB | |
| NB | PB | PB | PM | PM | PS | PS | ZE |
| NM | PB | PM | PS | PS | NS | NS | ZE |
| NS | PM | PM | PS | PS | NS | NS | ZE |
| ZE | ZE | ZE | ZE | ZE | ZE | ZE | ZE |
| PS | NS | NS | NS | PS | NS | NM | NB |
| PM | NS | NS | NS | PS | PS | PM | PB |
| PB | PS | PS | NS | PB | PM | PB | PB |
Table 2 Fuzzy control rule of ΔKp
| 角度误差变化率ec | 角度误差e | ||||||
|---|---|---|---|---|---|---|---|
| NB | NM | NS | ZE | PS | PM | PB | |
| NB | PB | PB | PM | PM | PS | PS | ZE |
| NM | PB | PM | PS | PS | NS | NS | ZE |
| NS | PM | PM | PS | PS | NS | NS | ZE |
| ZE | ZE | ZE | ZE | ZE | ZE | ZE | ZE |
| PS | NS | NS | NS | PS | NS | NM | NB |
| PM | NS | NS | NS | PS | PS | PM | PB |
| PB | PS | PS | NS | PB | PM | PB | PB |
| 角度误差变化率ec | 角度误差e | ||||||
|---|---|---|---|---|---|---|---|
| NB | NM | NS | ZE | PS | PM | PB | |
| NB | NB | NB | NB | NM | NM | ZE | ZE |
| NM | NB | NM | NS | ZE | PS | PS | PS |
| NS | PS | PS | PS | ZE | ZE | ZE | ZE |
| ZE | ZE | ZE | ZE | ZE | ZE | ZE | ZE |
| PS | PS | PS | PS | ZE | PS | PS | PM |
| PM | NB | NB | ZE | ZE | NS | NS | NS |
| PB | NB | NB | ZE | ZE | NS | NS | NS |
Table 3 Fuzzy control rule of ΔKi
| 角度误差变化率ec | 角度误差e | ||||||
|---|---|---|---|---|---|---|---|
| NB | NM | NS | ZE | PS | PM | PB | |
| NB | NB | NB | NB | NM | NM | ZE | ZE |
| NM | NB | NM | NS | ZE | PS | PS | PS |
| NS | PS | PS | PS | ZE | ZE | ZE | ZE |
| ZE | ZE | ZE | ZE | ZE | ZE | ZE | ZE |
| PS | PS | PS | PS | ZE | PS | PS | PM |
| PM | NB | NB | ZE | ZE | NS | NS | NS |
| PB | NB | NB | ZE | ZE | NS | NS | NS |
| 角度误差变化率ec | 角度误差e | ||||||
|---|---|---|---|---|---|---|---|
| NB | NM | NS | ZE | PS | PM | PB | |
| NB | PS | PS | ZE | ZE | ZE | PB | PB |
| NM | NS | NS | NS | ZE | PS | PM | PM |
| NS | PS | PS | PS | ZE | PS | PS | PS |
| ZE | PS | PS | PS | ZE | PS | PS | PS |
| PS | PS | PS | PS | ZE | PS | PS | PS |
| PM | PM | PM | PS | ZE | PS | PM | PM |
| PB | PB | PM | PS | ZE | PS | PM | PB |
Table 4 Fuzzy control rule of ΔKd
| 角度误差变化率ec | 角度误差e | ||||||
|---|---|---|---|---|---|---|---|
| NB | NM | NS | ZE | PS | PM | PB | |
| NB | PS | PS | ZE | ZE | ZE | PB | PB |
| NM | NS | NS | NS | ZE | PS | PM | PM |
| NS | PS | PS | PS | ZE | PS | PS | PS |
| ZE | PS | PS | PS | ZE | PS | PS | PS |
| PS | PS | PS | PS | ZE | PS | PS | PS |
| PM | PM | PM | PS | ZE | PS | PM | PM |
| PB | PB | PM | PS | ZE | PS | PM | PB |
| 参数 | 取值 |
|---|---|
| 旋翼直径D/mm | 200 |
| 旋翼旋转关节长度L1/mm | 150 |
| 旋翼摆动关节长度L2/mm | 60 |
| 行走轮半径r1/mm | 30 |
| 行走阻尼c0/(N·s·m-1) | 10 |
| 升降臂原始长度L3/mm | 600 |
| 同侧旋翼安装距离L4/mm | 1 000 |
| 电气箱尺寸/(mm×mm×mm) | 1 100×300×200 |
| 巡检机器人质量m/kg | 30 |
Table 5 Parameters of the inspection robot in simulation
| 参数 | 取值 |
|---|---|
| 旋翼直径D/mm | 200 |
| 旋翼旋转关节长度L1/mm | 150 |
| 旋翼摆动关节长度L2/mm | 60 |
| 行走轮半径r1/mm | 30 |
| 行走阻尼c0/(N·s·m-1) | 10 |
| 升降臂原始长度L3/mm | 600 |
| 同侧旋翼安装距离L4/mm | 1 000 |
| 电气箱尺寸/(mm×mm×mm) | 1 100×300×200 |
| 巡检机器人质量m/kg | 30 |
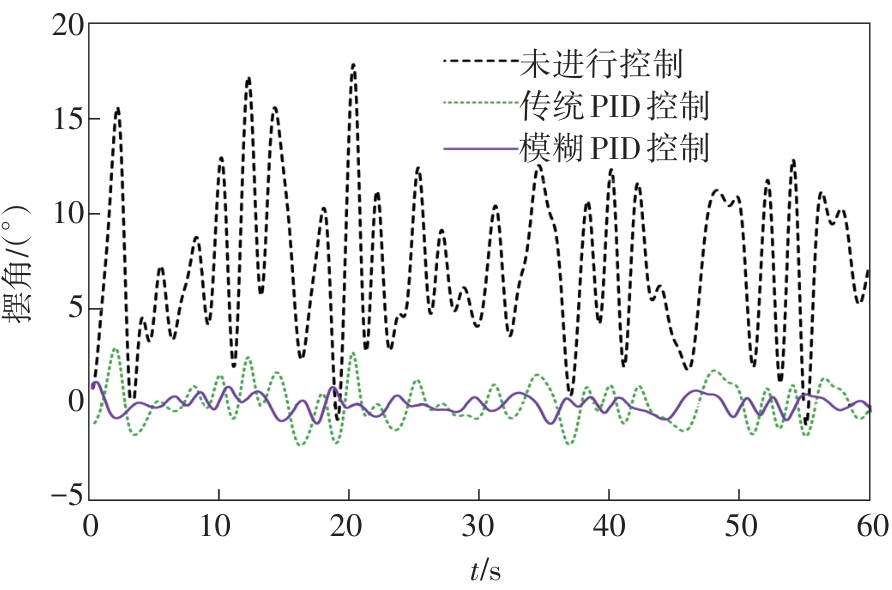
Fig. 12 Swing angle of the inspection robot
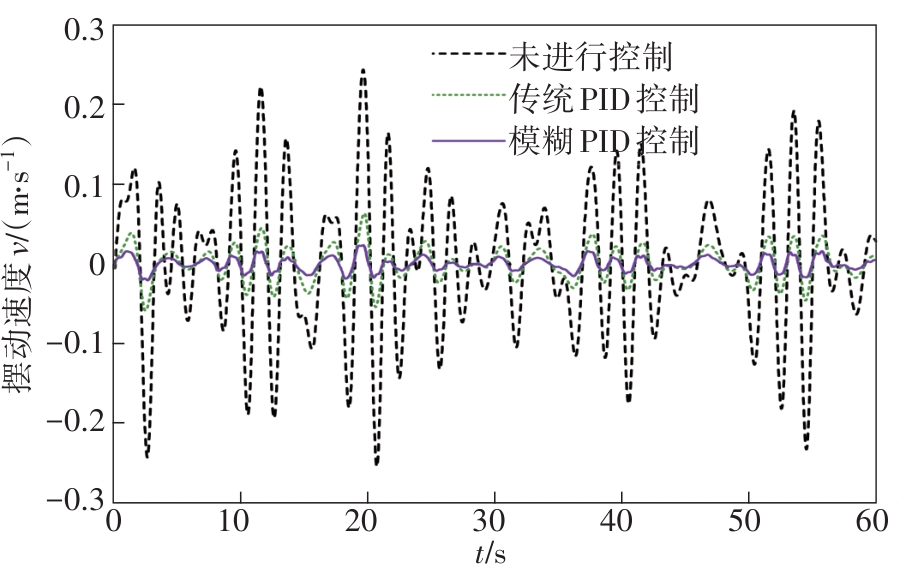
Fig. 13 Swing speed of the inspection robot
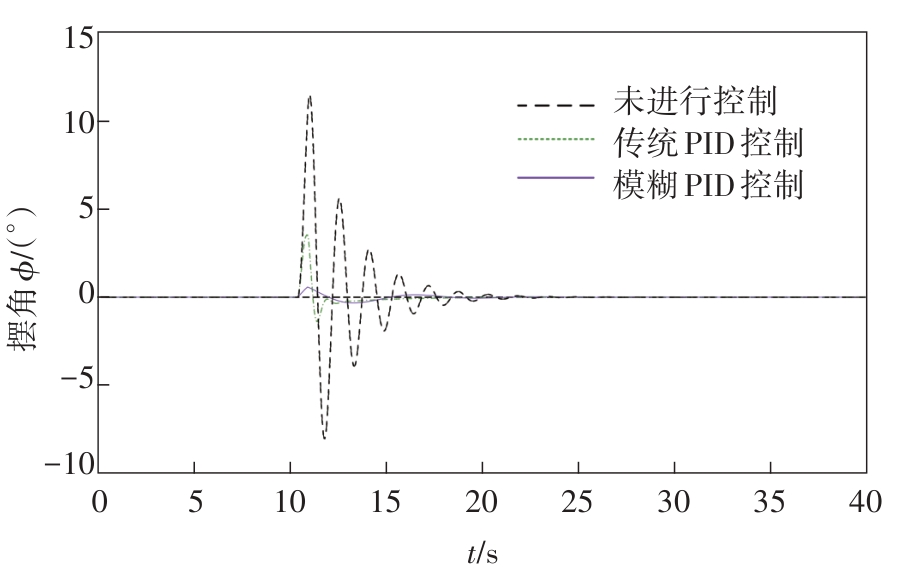
Fig. 14 Swing angle change of the robot under interference
| 样机参数 | 数值 |
|---|---|
| 3D打印材料 | 未来8200树脂 |
| 行走电机额定电压/V | 12 |
| 额定转速/(r·min-1) | 15 |
| 额定转矩/(N·mm) | 20 |
| 样机滑动速度/(mm·s-1) | 16 |
| 旋翼直径/mm | 205 |
| 升降机构原始长度/mm | 150 |
| 最大伸长长度/mm | 300 |
| 旋翼电机额定电压/V | 12 |
| 空载转速/(r·min-1) | 33 600 |
| 电气箱尺寸/(mm×mm×mm) | 300×150×120 |
| 样机高度/mm | 380 |
Table 6 Prototype parameters
| 样机参数 | 数值 |
|---|---|
| 3D打印材料 | 未来8200树脂 |
| 行走电机额定电压/V | 12 |
| 额定转速/(r·min-1) | 15 |
| 额定转矩/(N·mm) | 20 |
| 样机滑动速度/(mm·s-1) | 16 |
| 旋翼直径/mm | 205 |
| 升降机构原始长度/mm | 150 |
| 最大伸长长度/mm | 300 |
| 旋翼电机额定电压/V | 12 |
| 空载转速/(r·min-1) | 33 600 |
| 电气箱尺寸/(mm×mm×mm) | 300×150×120 |
| 样机高度/mm | 380 |
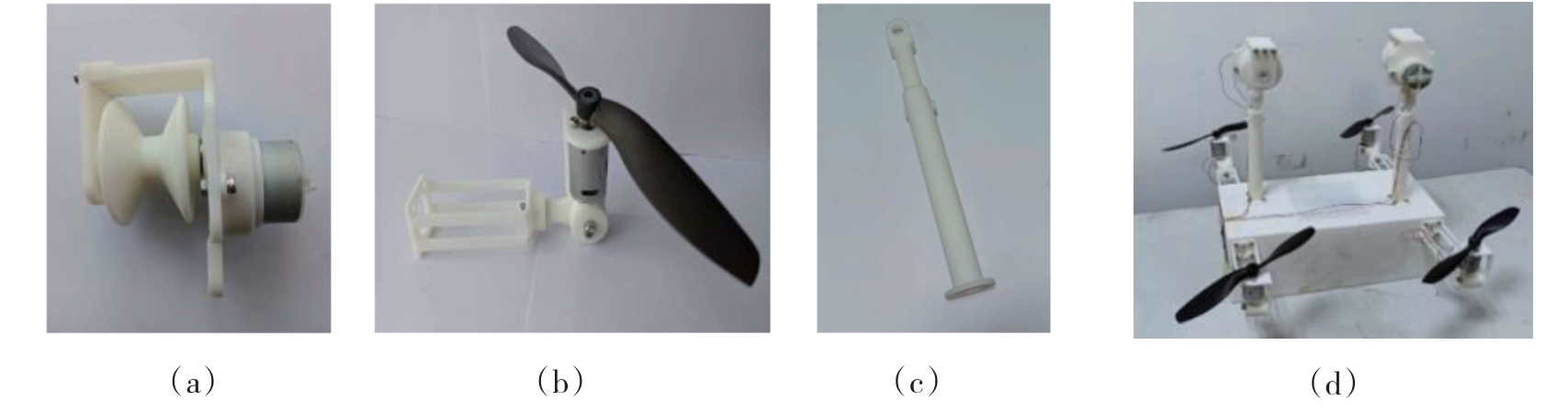
Fig. 15 Prototype of the inspection robot with rotors
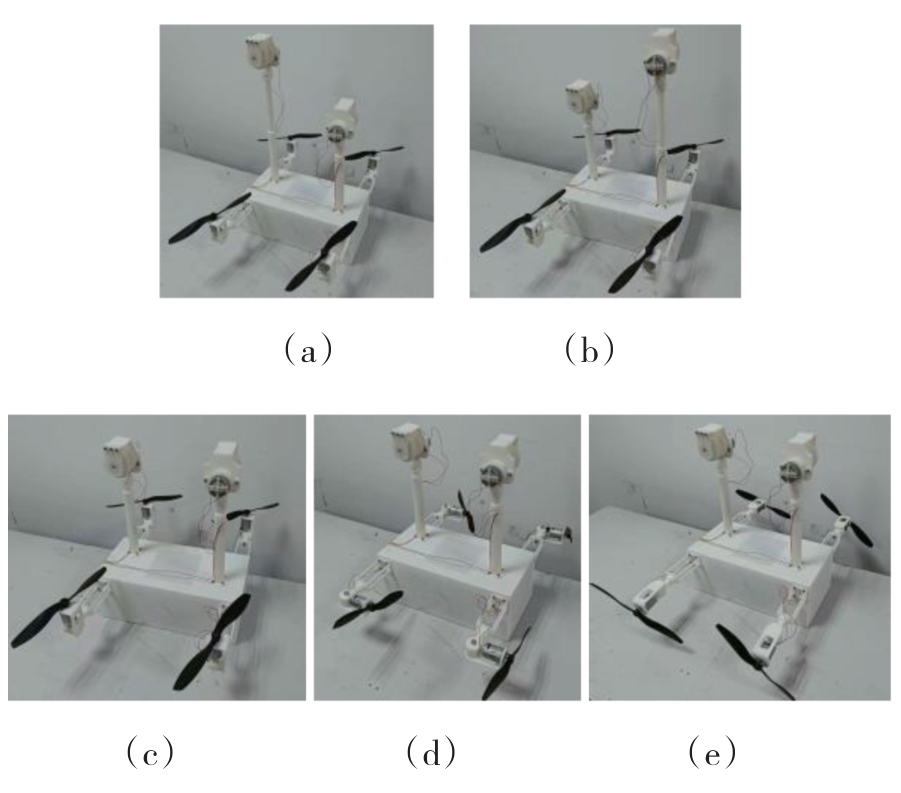
Fig. 16 Pose of the robot prototype

Fig. 17 Swing suppression experiment
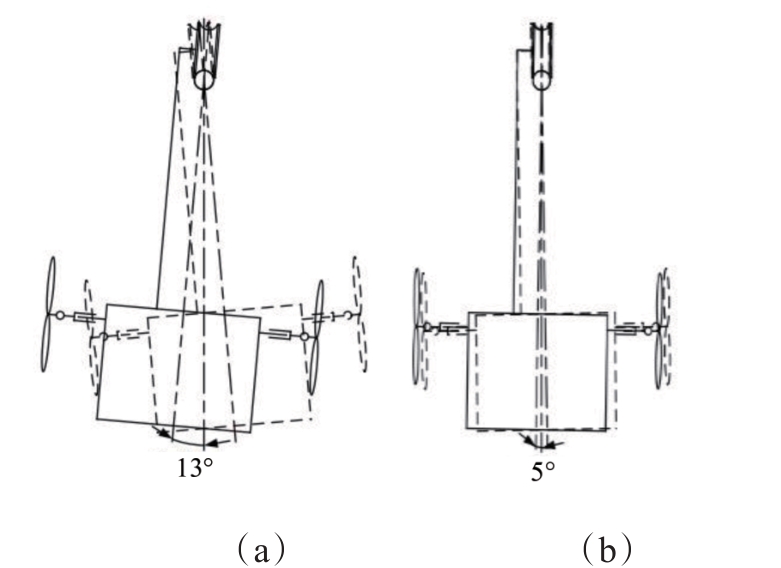
Fig. 18 Swing experiment results
| 1 | Yang L, Fan J F, Liu Y H,et al. A review on state-of-the-art power line inspection techniques[J]. IEEE Transactions on Instrumentation and Measurement,2020,69(12): 9350-9365. |
| 2 | Montambault S, Pouliot N. About the future of power line robotics[C]// International Conference on Applied Robotics for the Power Industry. Montreal: IEEE,2010: 1-6. |
| 3 | 洪展,吴功平,王伟,等. 风载荷下巡检机器人姿态检测与作业优化[J]. 机械设计与制造,2016(12): 197-200. |
| Hong Zhan, Wu Gong-ping, Wang Wei,et al. Attitude detection and operation optimization of inspection robot under wind load[J]. Machinery Design & Manufacture,2016(12): 197-200. | |
| 4 | 孙翠莲,赵明扬,王洪光. 风荷载下越障巡检机器人结构参数优化[J]. 机械工程学报,2010,46(7): 16-21. |
| Sun Cui-lian, Zhao Ming-yang, Wang Hong-guang. Structural parameters optimization of a navigating inspection robot under the wind load[J]. Journal of Mechanical Engineering,2010,46(7): 16-21. | |
| 5 | Guo J, Zhang X D, Shen H M,et al. Research on wind load characteristics of bionic crawling inspection robot[C]// International Conference on Real-Time Computing and Robotics (RCAR). Irkutsk:IEEE,2019: 385-390. |
| 6 | Qin X Y, Jia B, Lei J,et al. A novel flying-walking power line inspection robot and stability analysis hanging on the line under wind loads[J]. Mechanical Sciences,2022,13(1): 257-273. |
| 7 | Jiang W, Yan Y, Li Q M,et al. Research on robust stabilization control of high-voltage power maintenance robot under wind load action[J]. Industrial Robot: The International Journal of Robotics Research and Application,2019,46(6): 870-881. |
| 8 | Dian S Y, Wen X F, Dong H,et al. Development of a self-balance dual-arm robot for inspection of high-voltage power transmission lines[C]// International Conference on Mechatronics and Automation. Chengdu: IEEE, 2012: 2482-2487. |
| 9 | Wang W J, He T, Wang H S,et al. Balance control of a novel power transmission line inspection robot[C]// International Conference on Robotics and Biomimetics (ROBIO). Zhuhai: IEEE, 2015: 1882-1887. |
| 10 | Wang Y G, Yu H D, Xu J K. Design and simulation on inspection robot for high-voltage transmission lines[J]. Applied Mechanics and Materials,2014,615: 173-180. |
| 11 | Zhao T, Chen Y, Dian S Y,et al. General type-2 fuzzy gain scheduling PID controller with application to power-line inspection robots[J]. International Journal of Fuzzy Systems,2020,22(1): 181-200. |
| 12 | Pussente G A N, de Aguiar E P, Marcato A L M,et al. UAV power line tracking control based on a type-2 fuzzy-PID approach[J]. Robotics,2023,12(2): 60. |
| 13 | Raafi’u B, Darwito P A, Adziimaa A F,et al. Comparative study of fuzzy-PID and fuzzy-PI control systems on DC motor speed for four-wheeled mobile robotic[C]// International Conference on Advanced Mechatronics,Intelligent Manufacture and Industrial Automation (ICAMIMIA). Batu: IEEE, 2019: 129-133. |
| 14 | Wang T T, Wang H Z, Hu H S,et al. An adaptive fuzzy PID controller for speed control of brushless direct current motor[J]. SN Applied Sciences,2022,4(3): 71. |
| 15 | Bhimte R, Bhole-Ingale K, Shah P,et al. Precise position control of quanser servomotor using fractional order fuzzy PID controller[C]//IEEE Bombay Section Signature Conference (IBSSC). Mumbai: IEEE, 2020: 58-63. |
| 16 | 刘沛清. 空气螺旋桨理论及其应用[M]. 北京: 北京航空航天大学出版社,2006: 20-45. |
| Liu Pei-qing. Air propeller theory and its application[M]. Beijing: Beijing University of Aeronautics & Astronautics Press,2006: 20-45. | |
| 17 | 龚伟俊,李为相,张广明. 基于威布尔分布的风速概率分布参数估计方法[J]. 可再生能源,2011,29(6): 20-23. |
| Gong Wei-jun, Li Wei-xiang, Zhang Guang-ming. The estimation algorithm on the probabilistic distribution parameters of wind speed based on Weibull distribution[J]. Renewable Energy Resources,2011,29(6): 20-23. | |
| 18 | 张猛. 输电线路巡检机器人旋翼系统的机构设计及性能分析[D]. 沈阳: 东北大学,2021. |
| Zhang Meng. Mechanism design and performance analysis of rotor system of transmission line inspection robot[D]. Shenyang: Northeastern University,2021. |
| [1] | LI Xiao-peng, LI Kai, FAN Xing, ZHANG Ling-yue. Analysis on the Walking Ability of Dual-arm Inspection Robots Along Catenary Lines with Posture Changes [J]. Journal of Northeastern University(Natural Science), 2022, 43(6): 872-880. |
| [2] | LI Xiao-peng, FAN Xing, LI Kai, ZHANG Ling-yue. Dynamic Performance Analysis of Line Inspecting Robots Considering Time-Varying Loads [J]. Journal of Northeastern University(Natural Science), 2022, 43(5): 660-667. |
| [3] | LI Xiao-peng, SHANG Dong-yang, LI Fan-jie, CAO Wei-long. Dynamic Modeling and DME Evaluation of Power Transmission Line Inspection Robots [J]. Journal of Northeastern University Natural Science, 2020, 41(9): 1280-1284. |
| [4] | LI Xiao-peng, SHANG Dong-yang, LI Fan-jie,WEN Bang-chun. Flexible Joint Control Strategy Based on Posture Change of Transmission Line Inspection Robots [J]. Journal of Northeastern University Natural Science, 2020, 41(11): 1577-1583. |
| [5] | FANG Li-jin, ZHU Shuai, HE Chang-lin, XU Ji-qian. Research on the Structure Design and Steering and Obstacle-crossing of a Novel Four-Arm Inspection Robot [J]. Journal of Northeastern University Natural Science, 2019, 40(6): 825-830. |
| [6] | FANG Li-jin, HE Chang-lin, ZHU Shuai, TAO Guang-hong. Control Strategy and Trajectory Planning of Serial Multi-arm Inspection Robots [J]. Journal of Northeastern University Natural Science, 2019, 40(5): 734-739. |
| [7] | LIU Yun-shan, JIA Lei, WEN Bang-chun. Multi-frequency Controlled Synchronization of a Vibrating System with Two-Motor Drives Rotating in Opposite Directions [J]. Journal of Northeastern University Natural Science, 2019, 40(12): 1726-1731. |
| [8] | WEI Yong-le , FANG Li-jin, TAO Guang-hong. Analysis for Crossing Obstacle Distance of Dual-Arms Inspection Robot [J]. Journal of Northeastern University Natural Science, 2017, 38(9): 1293-1297. |
| [9] | ZHANG Xiu-zhi, JIA Quan, SHANG Tao, YUAN Rui-qiang. Control Method of High-Speed Rice Transplanter’s Profiling System [J]. Journal of Northeastern University Natural Science, 2016, 37(9): 1288-1292. |
| [10] | FANG Lijin, TAO Guanghong. Research and Design of a Novel Inspection Robot with Multiunit Mechanisms in Series [J]. Journal of Northeastern University Natural Science, 2014, 35(8): 1173-1177. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||