Journal of Northeastern University(Natural Science) ›› 2025, Vol. 46 ›› Issue (12): 66-77.DOI: 10.12068/j.issn.1005-3026.2025.20249031
• Mechanical Engineering • Previous Articles Next Articles
Xian-bin WANG, Wen-long BAO, Lin LI, Ying-zhe ZHANG
Received:2024-06-18
Online:2025-12-15
Published:2026-02-09
Contact:
Xian-bin WANG
CLC Number:
Xian-bin WANG, Wen-long BAO, Lin LI, Ying-zhe ZHANG. Mechanism Analysis and Application of Human-Machine Co-driving Effect Under Severe Driving Conditions[J]. Journal of Northeastern University(Natural Science), 2025, 46(12): 66-77.
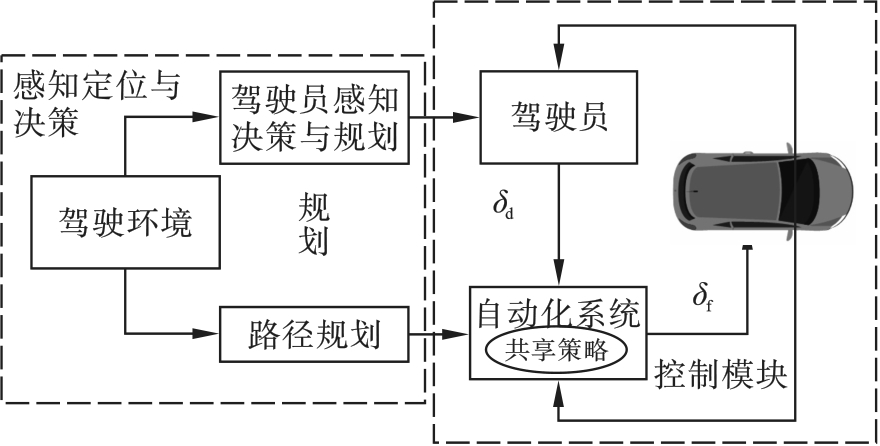
Fig.1 Dual-driving and dual-control tandem human-machine co-driving framework
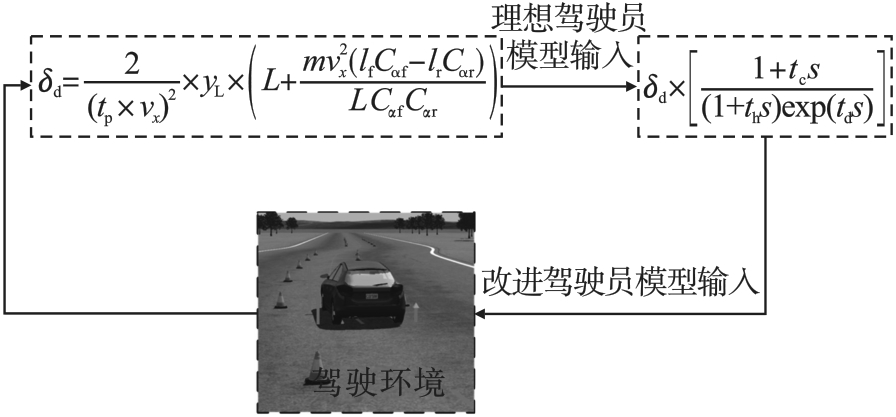
Fig.2 Improved driver model
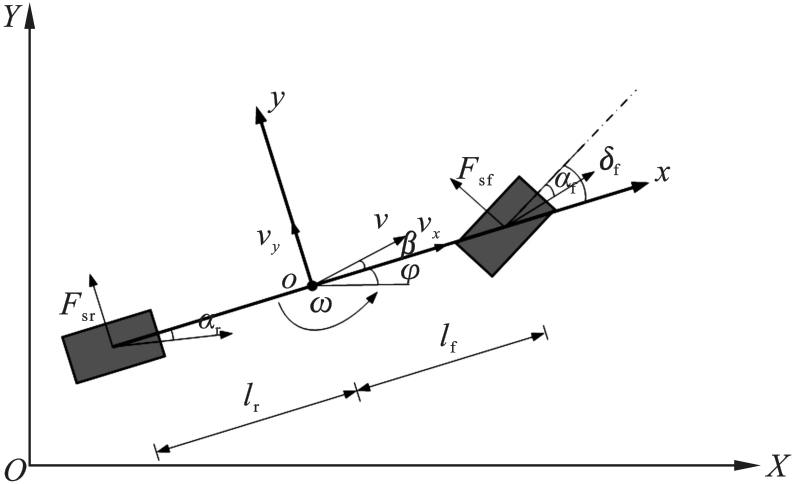
Fig.3 Vehicle model
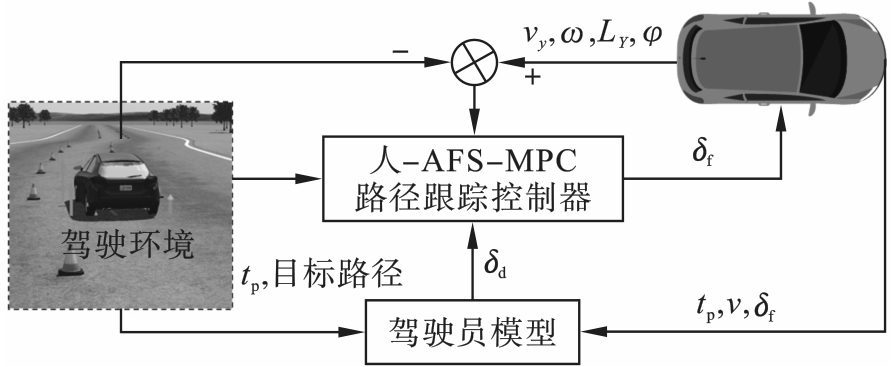
Fig.4 Human-machine co-driving strategy
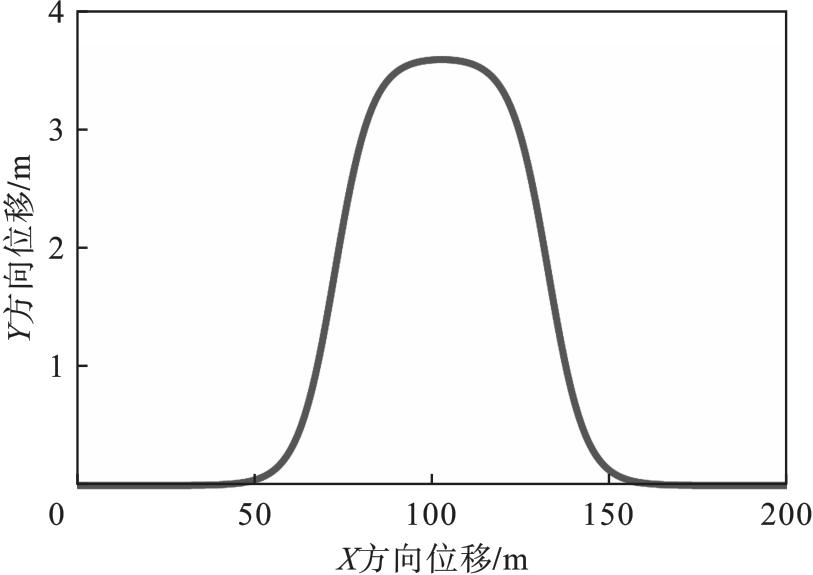
Fig.5 Reference trajectory
| 参数 | 数值 |
|---|---|
| 车辆质量 | 1 412 |
| 1.015 | |
| 1.895 | |
| -112 600 | |
| -94 568 | |
| 1 536.7 |
Table 1 Vehicle parameters (taking a certainC-class human-machine co-driving sedan as an example)
| 参数 | 数值 |
|---|---|
| 车辆质量 | 1 412 |
| 1.015 | |
| 1.895 | |
| -112 600 | |
| -94 568 | |
| 1 536.7 |
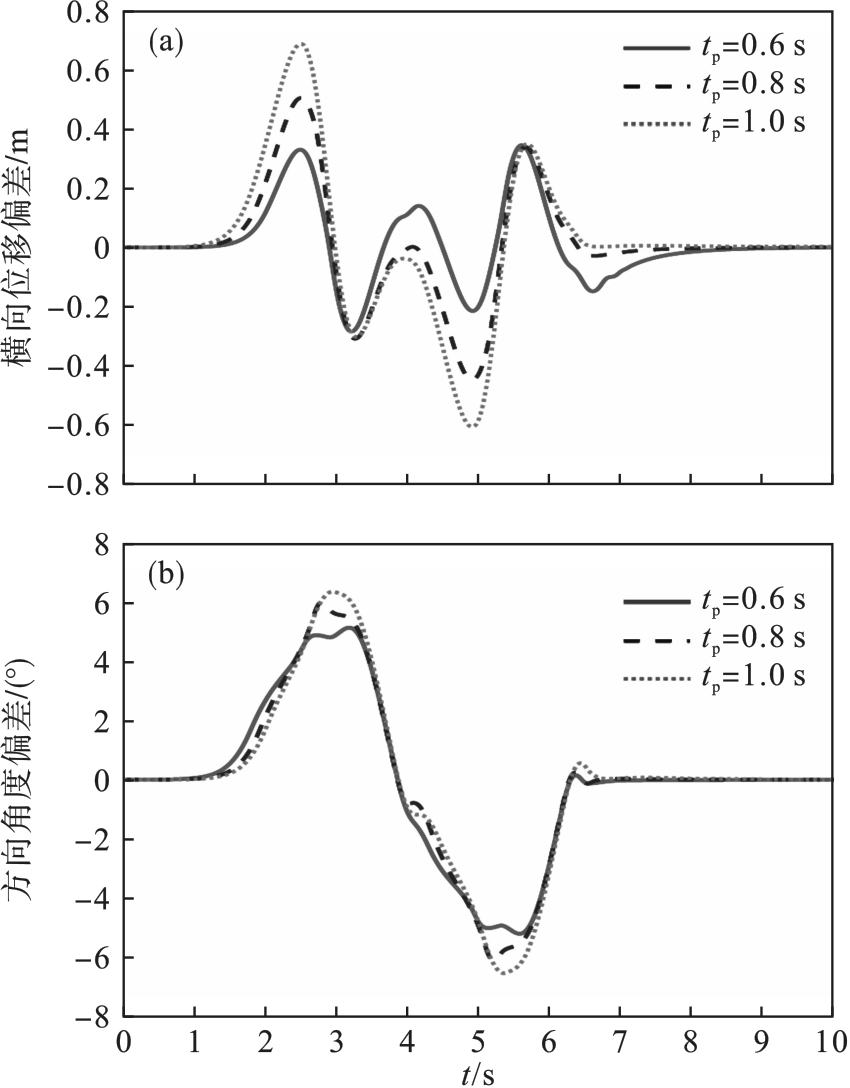
Fig.6 Tracking accuracy at different preview time
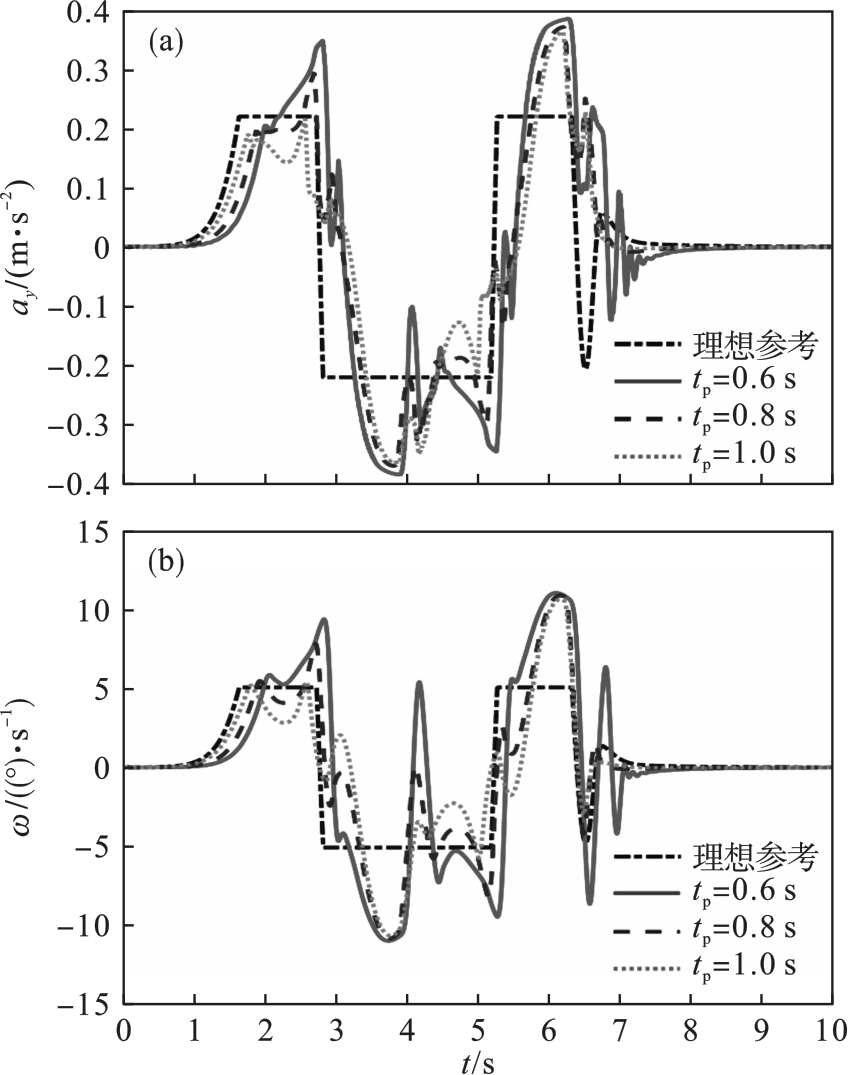
Fig.7 Lateral stability at different preview time
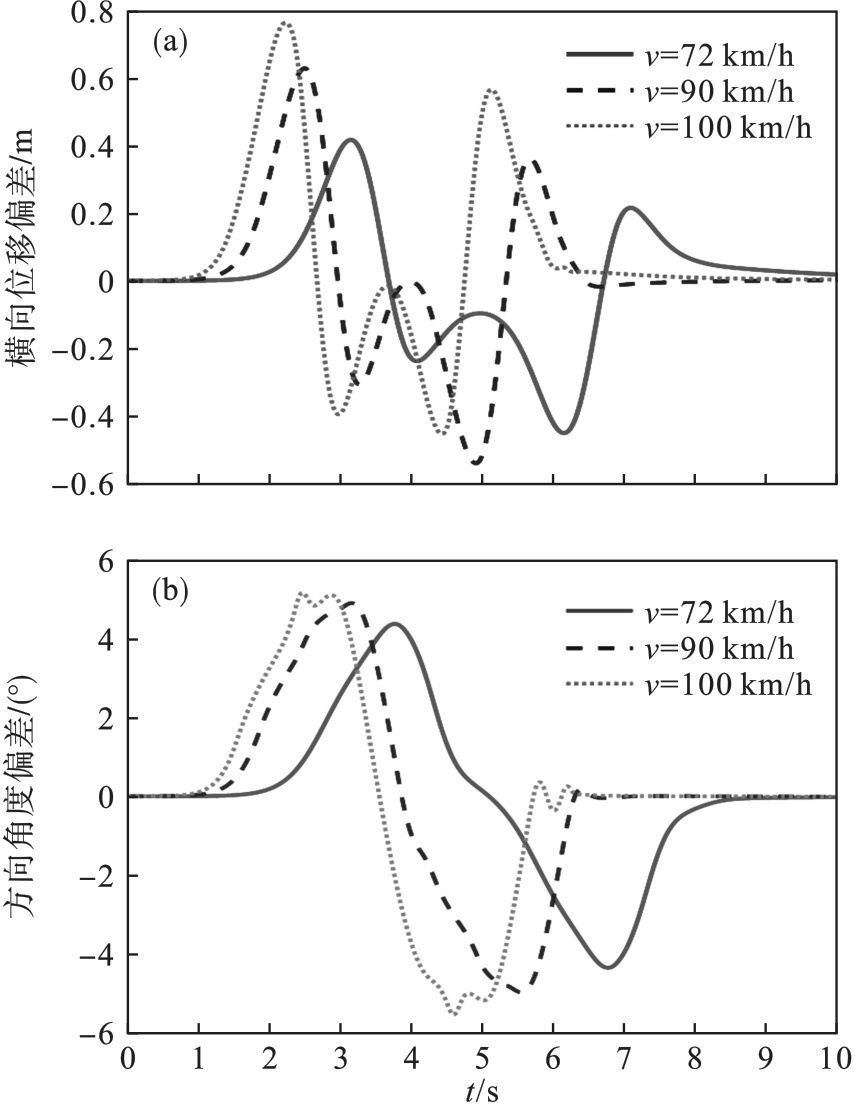
Fig.8 Tracking accuracy at different speeds
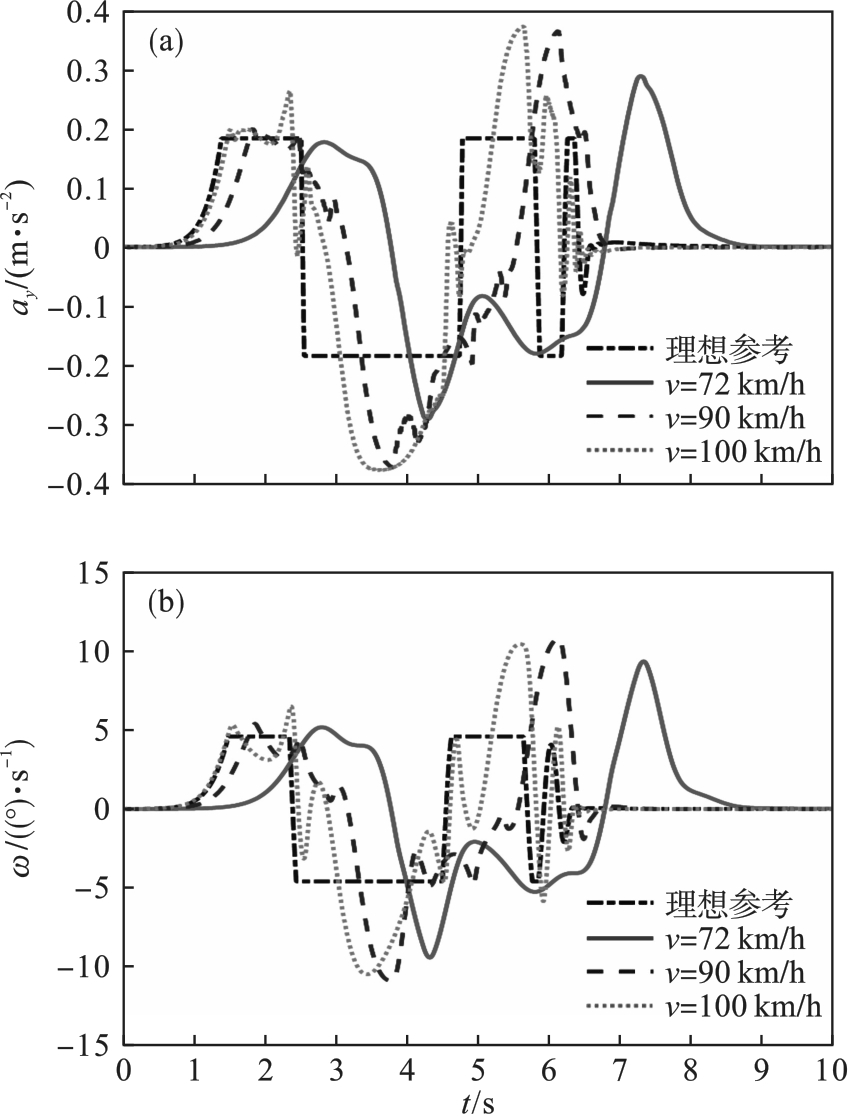
Fig.9 Lateral stability at different speeds
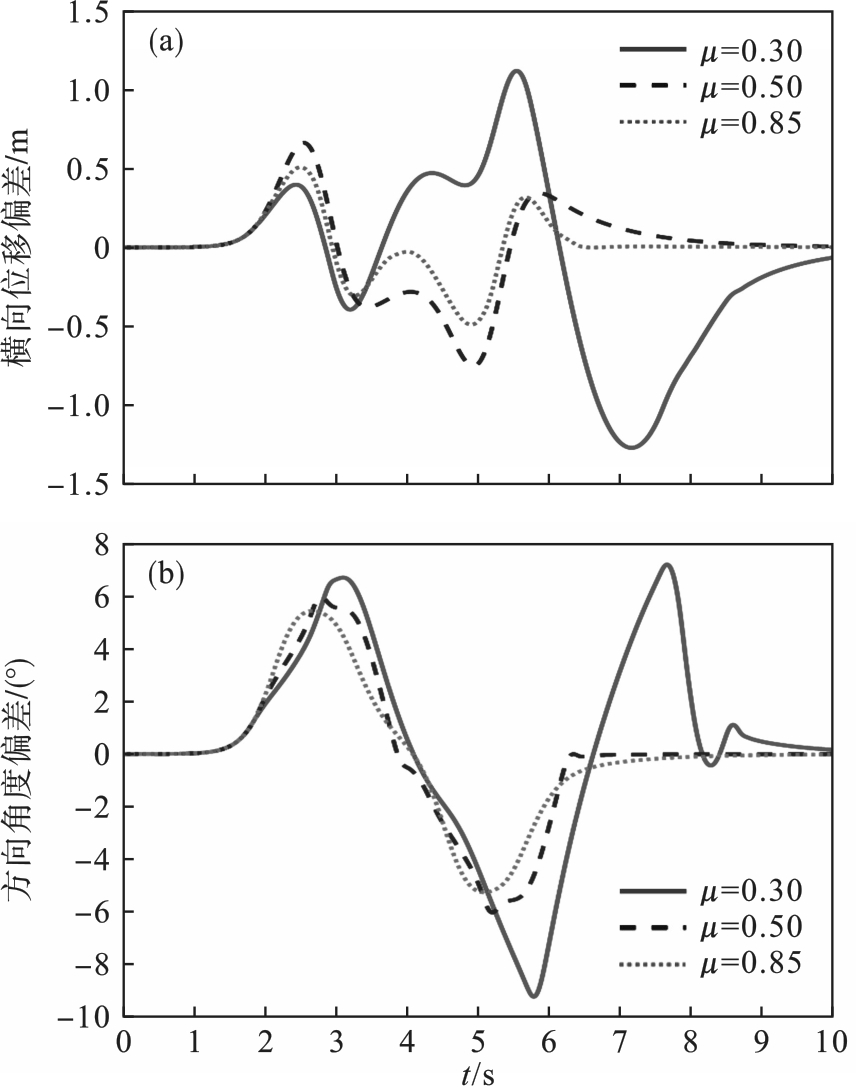
Fig.10 Tracking accuracy under different road adhesion coefficients
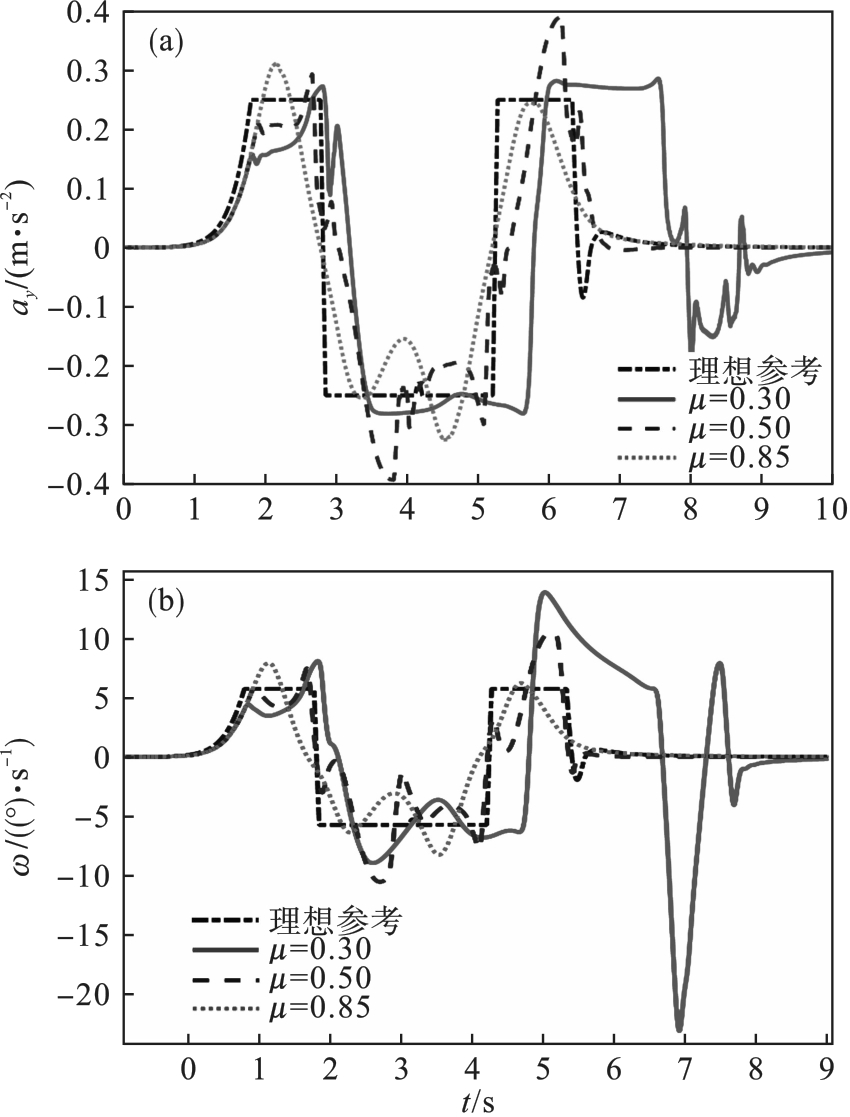
Fig.11 Lateral stability under different road adhesion coefficients
| 参数 | 状态1 | 状态2 | 状态3 | 状态4 | 状态5 |
|---|---|---|---|---|---|
| 0.1 | 0.2 | 0.2 | 0.2 | 0.3 | |
| 0.1 | 0.1 | 0.2 | 0.2 | 0.2 | |
| 0.4 | 0.4 | 0.4 | 0.3 | 0.3 |
Table 2 Driver state parameters
| 参数 | 状态1 | 状态2 | 状态3 | 状态4 | 状态5 |
|---|---|---|---|---|---|
| 0.1 | 0.2 | 0.2 | 0.2 | 0.3 | |
| 0.1 | 0.1 | 0.2 | 0.2 | 0.2 | |
| 0.4 | 0.4 | 0.4 | 0.3 | 0.3 |
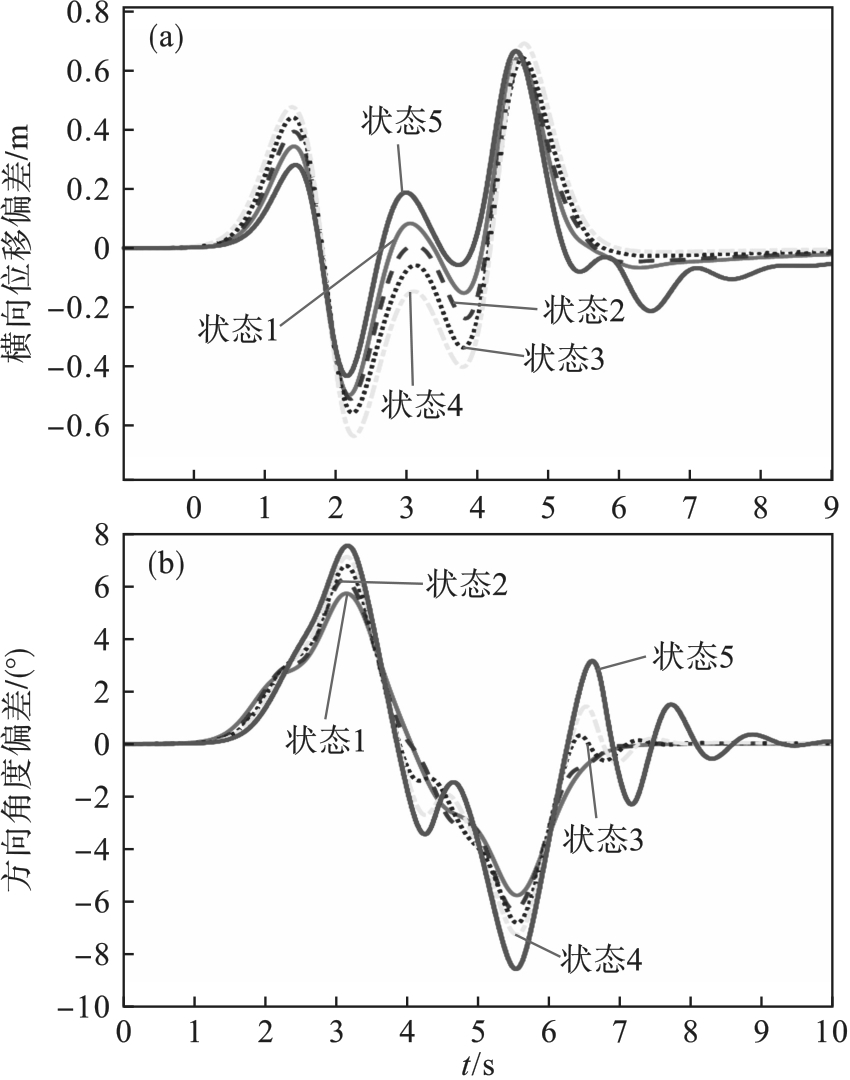
Fig.12 Tracking accuracy under different driver states
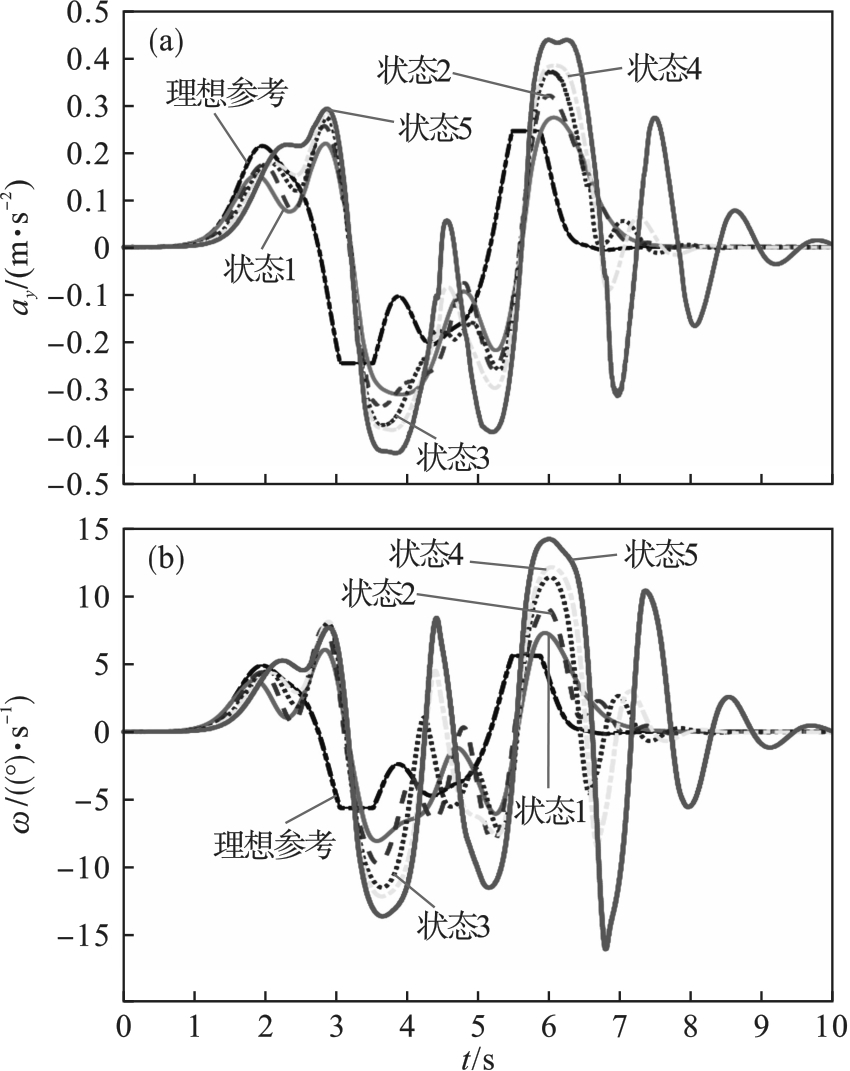
Fig.13 Lateral stability under different driver states
| 工况 | Np | Nc | 状态权重 Q | 控制权重 R |
|---|---|---|---|---|
| 工况1 | 80 | 60 | [1 0 0 0;0 1 0 0;0 0 2 0;0 0 0 5] | [ |
| 工况2 | 80 | 60 | [1 0 0 0;0 1 0 0;0 0 1 0;0 0 0 1] | [ |
| 工况3 | 80 | 60 | [2 0 0 0;0 5 0 0;0 0 1 0;0 0 0 1] | [ |
Table 3 Controller parameters
| 工况 | Np | Nc | 状态权重 Q | 控制权重 R |
|---|---|---|---|---|
| 工况1 | 80 | 60 | [1 0 0 0;0 1 0 0;0 0 2 0;0 0 0 5] | [ |
| 工况2 | 80 | 60 | [1 0 0 0;0 1 0 0;0 0 1 0;0 0 0 1] | [ |
| 工况3 | 80 | 60 | [2 0 0 0;0 5 0 0;0 0 1 0;0 0 0 1] | [ |
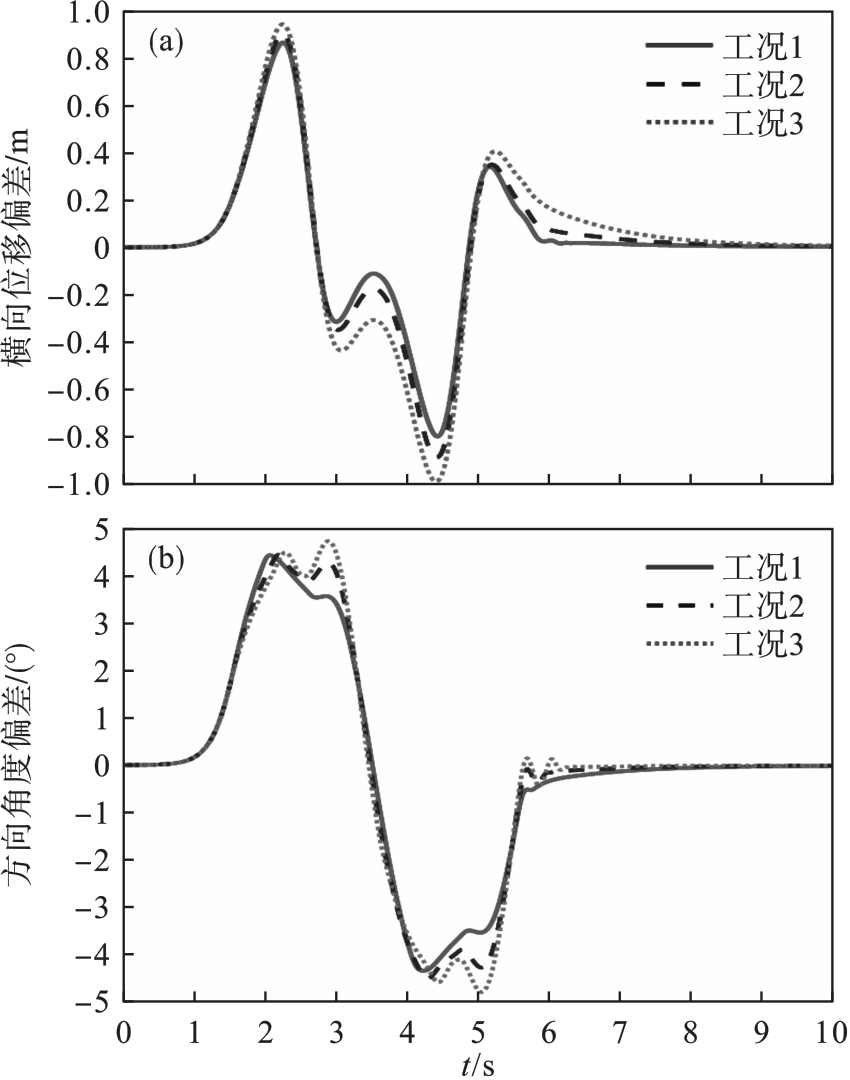
Fig.14 Tracking accuracy under different controller parameters
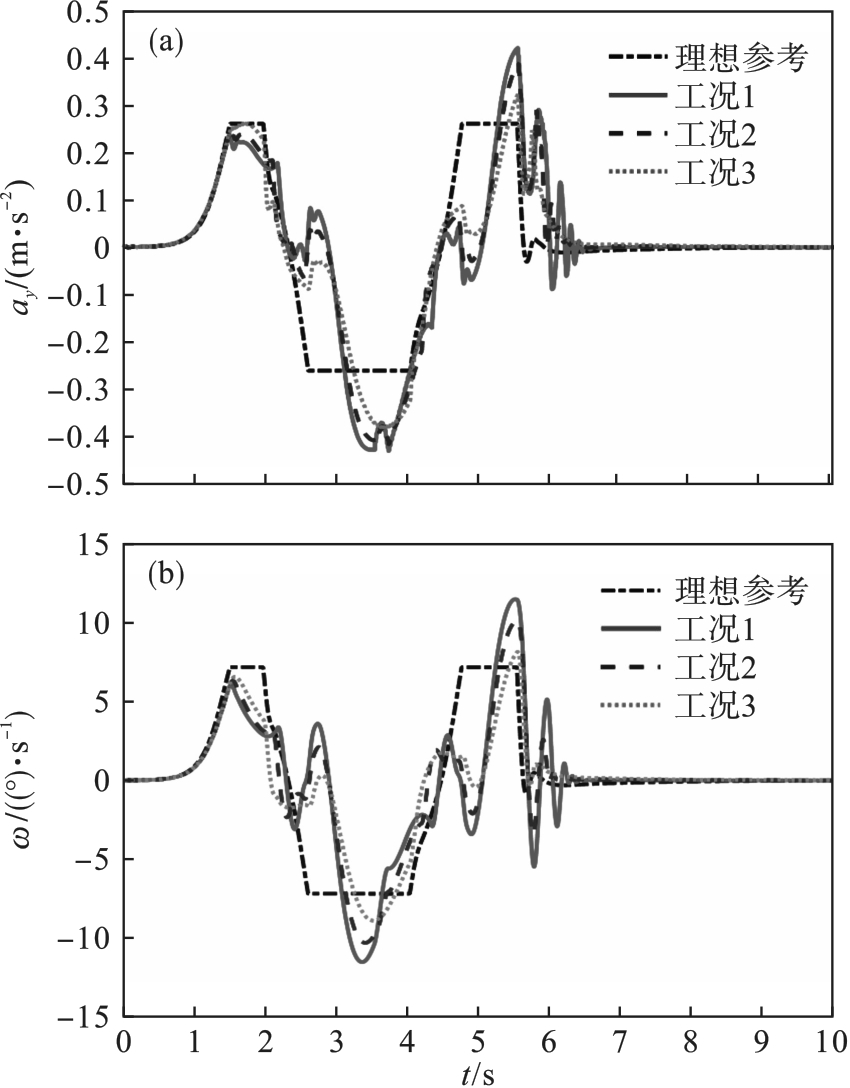
Fig.15 Lateral stability under different controller parameters
控制器 参数工况 | 侧向位移误差 绝对值均值 | 方向角度误差 绝对值均值 | 侧向加速度误差 绝对值均值 | 横摆角速度 误差绝对值均值 |
|---|---|---|---|---|
| m | ( | m·s-2 | ( | |
| 工况1 | 0.169 7 | 1.386 0 | 0.853 | 1.988 7 |
| 工况2 | 0.194 7 | 1.441 6 | 0.839 | 1.828 5 |
| 工况3 | 0.236 7 | 1.468 7 | 0.834 | 1.719 2 |
Table 4 Comparison of human-machine co-driving effects with different controller parameters
控制器 参数工况 | 侧向位移误差 绝对值均值 | 方向角度误差 绝对值均值 | 侧向加速度误差 绝对值均值 | 横摆角速度 误差绝对值均值 |
|---|---|---|---|---|
| m | ( | m·s-2 | ( | |
| 工况1 | 0.169 7 | 1.386 0 | 0.853 | 1.988 7 |
| 工况2 | 0.194 7 | 1.441 6 | 0.839 | 1.828 5 |
| 工况3 | 0.236 7 | 1.468 7 | 0.834 | 1.719 2 |
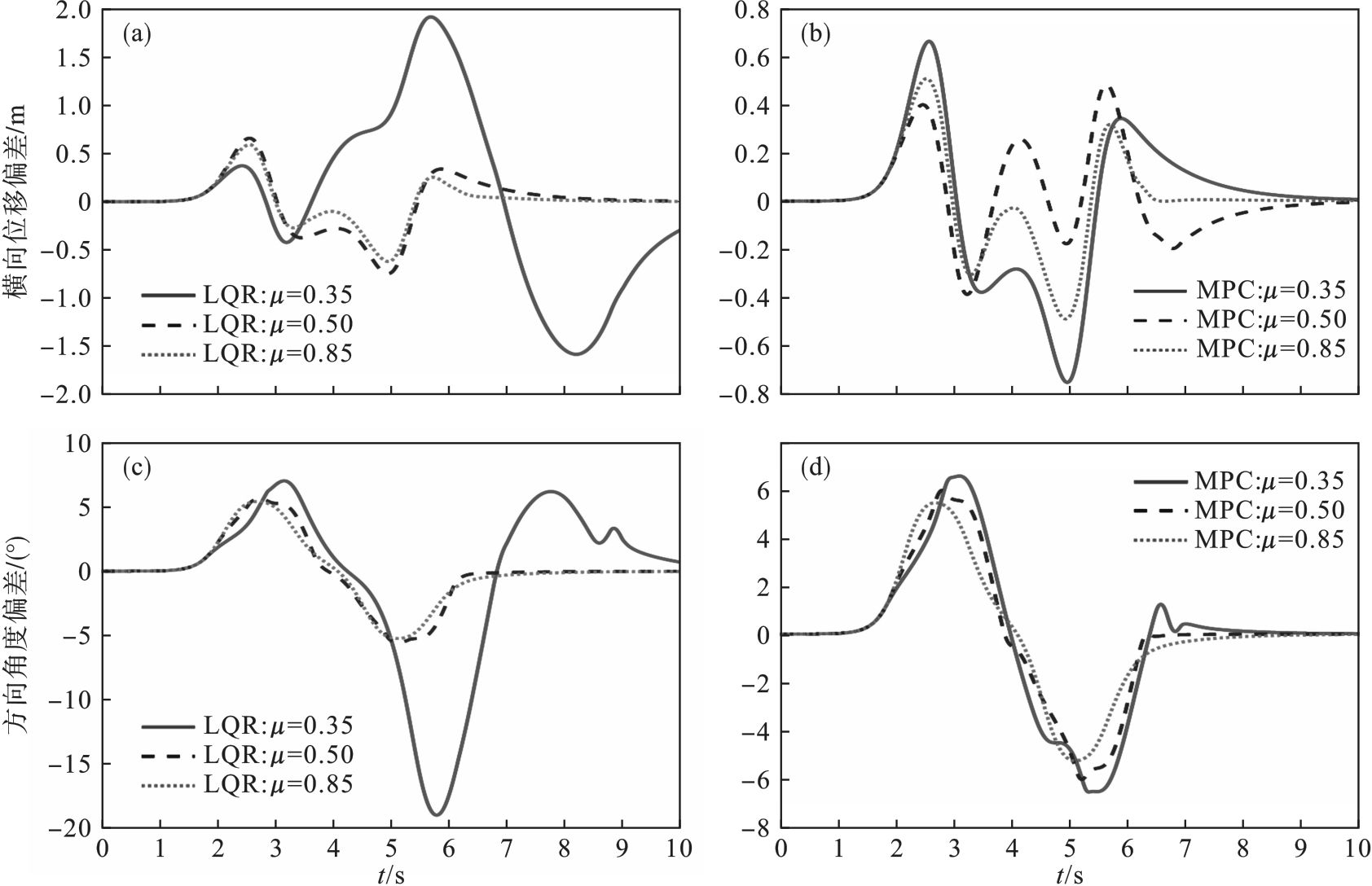
Fig.16 Resistance to road adhesion coefficient disturbance: tracking accuracy
Fig.17 Resistance to road adhesion coefficient disturbance: lateral stability
| [1] | Nunes A, Reimer B, Coughlin J F. People must retain control of autonomous vehicles [J].Nature, 2018, 556(7700): 169-171. |
| [2] | Zheng N N, Liu Z Y, Ren P J, et al. Hybrid-augmented intelligence: collaboration and cognition[J]. Frontiers of Information Technology & Electronic Engineering, 2017, 18(2): 153-179. |
| [3] | 熊璐, 杨兴, 卓桂荣, 等. 无人驾驶车辆的运动控制发展现状综述[J]. 机械工程学报, 2020, 56(10): 127-143. |
| Xiong Lu, Yang Xing, Zhuo Gui-rong, et al. Review on motion control of autonomous vehicles[J] Journal of Mechanical Engineering, 2020, 56(10): 127-143. | |
| [4] | Mars F, Chevrel P. Modelling human control of steering for the design of advanced driver assistance systems [J]. Annual Reviews in Control, 2017, 44: 292-302. |
| [5] | Flad M, Otten J, Schwab S, et al. Steering driver assistance system: a systematic cooperative shared control design approach[C]//2014 IEEE International Conference on Systems, Man, and Cybernetics(SMC).San Diego,2014: 3585–3592. |
| [6] | Na X, Cole D J. Game-theoretic modeling of the steering interaction between a human driver and a vehicle collision avoidance controller[J]. IEEE Transactions on Human-Machine Systems, 2015, 45(1): 25-38. |
| [7] | Na X, Cole D J. Linear quadratic game and non-cooperative predictive methods for potential application to modelling driver-AFS interactive steering control[J]. Vehicle System Dynamics, 2013, 51(2): 165-198. |
| [8] | Na X, Cole D J. Application of open-loop Stackelberg equilibrium to modeling a driver’s interaction with vehicle active steering control in obstacle avoidance[J]. IEEE Transactions on Human-Machine Systems, 2017, 47(5): 673-685. |
| [9] | 潘学军, 张兆惠. 基于模糊PID的智能汽车控制系统[J]. 控制工程, 2009, 16(5): 618-622. |
| Pan Xue-jun, Zhang Zhao-hui. Fuzzy PID control system for intelligent vehicle[J]. Control Engineering of China, 2009, 16(5): 618-622. | |
| [10] | 赵艳娥, 张建武. 基于滑模控制的四轮驱动电动汽车稳定性控制[J]. 上海交通大学学报, 2009, 43(10): 1526-1530. |
| Zhao Yan-e, Zhang Jian-wu. Stability control for a four-motor-wheel drive electric vehicle based on sliding mode control[J]. Journal of Shanghai Jiaotong University, 2009, 43(10): 1526-1530. | |
| [11] | 李炜, 吴麟麟, 汪若尘,等. 智能汽车路径跟踪精度及操纵稳定性耦合机理分析[J]. 汽车工程学报, 2021, 11(5): 346-353. |
| Li Wei, Wu Lin-lin, Wang Ruo-chen, et al. Mechanism analysis of the coupling between intelligent vehicle path tracking accuracy and steering stability[J]. Chinese Journal of Automotive Engineering, 2021, 11(5): 346-353. | |
| [12] | 刘瑞, 朱西产, 刘霖,等. 基于非合作模型预测控制的人机共驾策略[J]. 同济大学学报(自然科学版), 2019, 47(7): 1037-1045. |
| Liu Rui, Zhu Xi-chan, Liu Lin, et al. Cooperative driving strategy based on non-cooperative model predictive control[J]. Journal of Tongji University(Natural Science), 2019, 47(7): 1037-1045. | |
| [13] | Khosravani S, Khajepour A, Fidan B,et al. Development of a robust vehicle control with driver in the loop[C]// 2014 American Control Conference. Portland: IEEE, 2014:3482-3487. |
| [14] | Li R J, Li S B, Gao H B, et al. Effects of human adaptation and trust on shared control for driver automation cooperative driving [R]. Kunshan: Kunshan Economic and Technological Development Zone Management Committee, 2017. |
| [15] | Li R J, Li Y N, Li S E, et al. Driver-automation indirect shared control of highly automated vehicles with intention-aware authority transition [C] //2017 IEEE Intelligent Vehicles Symposium. Los Angeles, 2017: 26-32. |
| [16] | Liu J, Guo H Y, Song L H, et al. Driver-automation shared steering control for highly automated vehicles [J]. Science China Information Sciences, 2020, 63(9): 190201. |
| [17] | 郭孔辉. 驾驶员-汽车闭环系统操纵运动的预瞄最优曲率模型[J]. 汽车工程, 1984, 6(3): 1-16. |
| Guo Kong-hui. Drivers-vehicle close-loop simulation of handling by preselect optimal curvature method [J]. Automotive Engineering, 1984, 6(3): 1-16. | |
| [18] | 陈无畏, 谈东奎, 汪洪波,等. 一类基于轨迹预测的驾驶员方向控制模型[J]. 机械工程学报, 2016, 52(14): 106-115. |
| Chen Wu-wei, Tan Dong-kui, Wang Hong-bo, et al. A class of driver directional control model based on trajectory prediction[J]. Journal of Mechanical Engineering, 2016, 52(14): 106-115. | |
| [19] | Falcone P, Borrelli F, Asgari J, et al. Predictive active steering control for autonomous vehicle systems [J]. IEEE Transactions on Control Systems Technology, 2007, 15(3): 566-580. |
| [20] | 余志生. 汽车理论 [M].5版. 北京: 机械工业出版社, 2009. |
| Yu Zhi-sheng. Automobile theory [M].5th ed. Beijing: China Machine Press,2009. | |
| [21] | Rajamani R .Vehicle dynamics and control[M].Boston: Springer,2012. |
| [22] | 郭孔辉, 马凤军, 孔繁森. 人-车-路闭环系统驾驶员模型参数辨识[J]. 汽车工程, 2002, 24(1): 20-24. |
| Guo Kong-hui, Ma Feng-jun, Kong Fan-sen. Driver model parameter identification of the driver-vehicle-road closed-loop system[J]. Automotive Engineering, 2002, 24(1): 20-24. |
| [1] | Qian-wen LI, Qing-you MENG, Zhi-tao YUAN, Sai-nan QI. Floatation Effect and Mechanism of Hydroxamic Acid Collectors for Ilmenite and Titanaugite [J]. Journal of Northeastern University(Natural Science), 2025, 46(6): 138-146. |
| [2] | Gang LI, Xiu-peng ZHANG, Wei-da CHANG, Wei ZHOU. Explosion Characteristics of NCM Lithium-Ion Battery Vent Gases After Thermal Runaway Under High Temperature Conditions [J]. Journal of Northeastern University(Natural Science), 2025, 46(4): 78-86. |
| [3] | Chuan-yin TANG, Lyu PAN, Jing-hong LI, Ming-li ZHANG. Vehicle Path Tracking Control Considering Stability Boundaries and Roll Stability [J]. Journal of Northeastern University(Natural Science), 2024, 45(8): 1123-1134. |
| [4] | SU Wei-xing, XUE Feng, WEN Yong-gang, LIU Fang. Real-Time Driving Ability Evaluation Algorithm for Human-Machine Co-driving Decision [J]. Journal of Northeastern University(Natural Science), 2023, 44(8): 1078-1088. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||