Journal of Northeastern University(Natural Science) ›› 2025, Vol. 46 ›› Issue (4): 1-7.DOI: 10.12068/j.issn.1005-3026.2025.20230303
• Information & Control •
Liang LIANG, Cheng-dong WU, Shi-chang LIU
Received:2023-11-02
Online:2025-04-15
Published:2025-07-01
CLC Number:
Liang LIANG, Cheng-dong WU, Shi-chang LIU. Absolute Position Accuracy Calibration Algorithm for Robots Based on Joint Geometric Error[J]. Journal of Northeastern University(Natural Science), 2025, 46(4): 1-7.
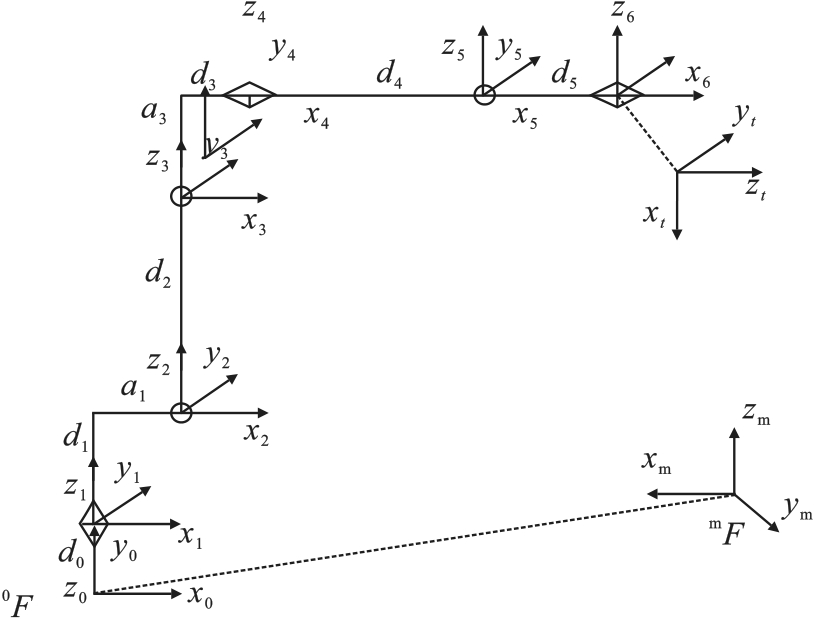
Fig.1 Diagram of robot kinematic coordinate system
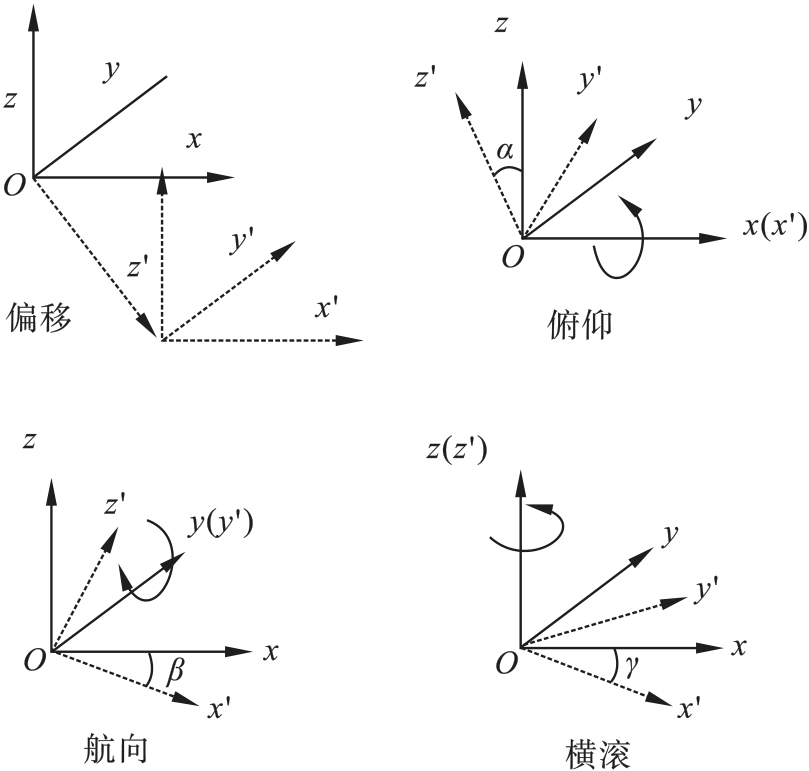
Fig.2 Diagram of joint coordinate system with geometric error
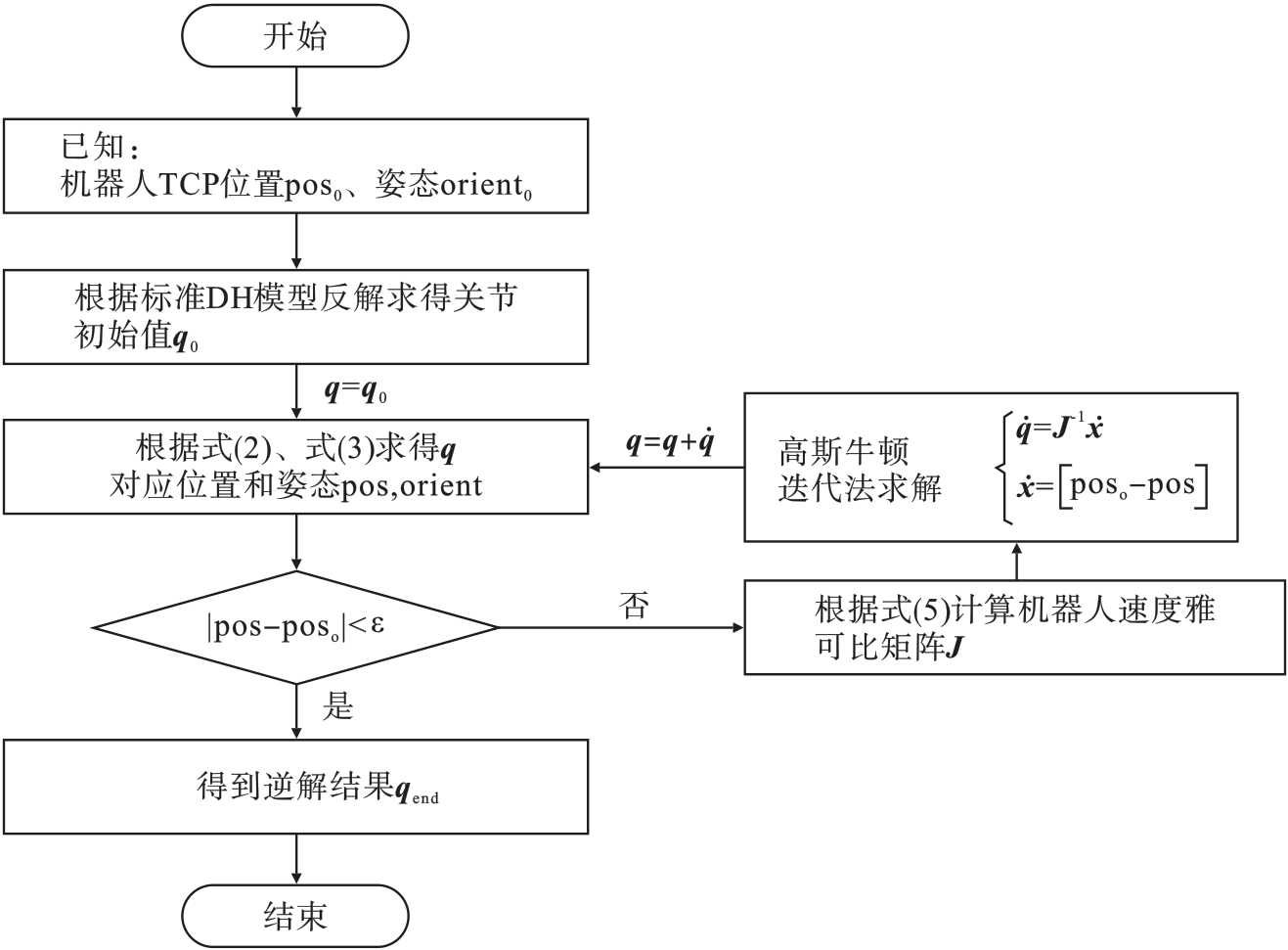
Fig.3 Diagram of error kinematics inverse solution process
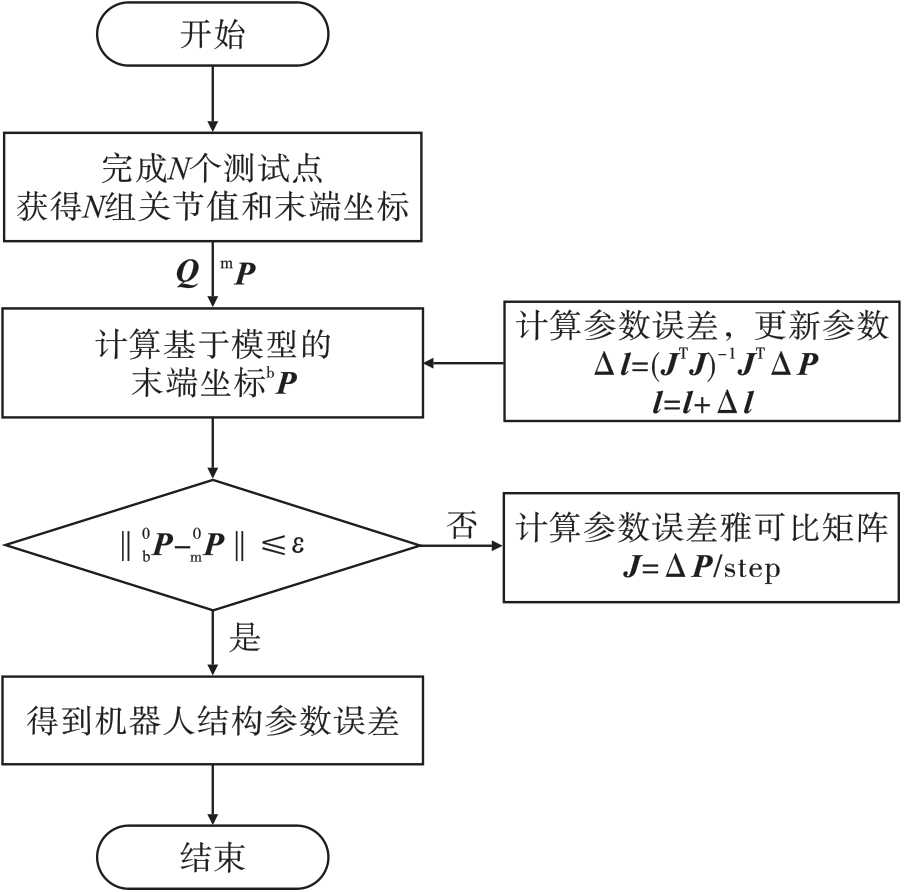
Fig.4 Diagram of joint geometric error calibration process
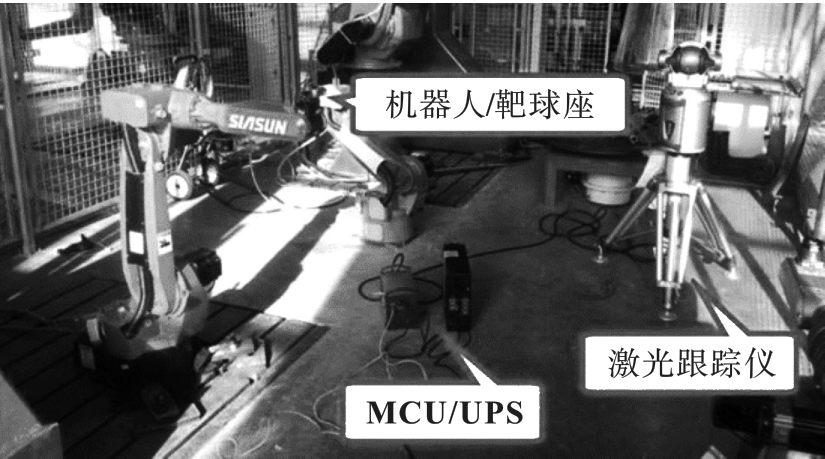
Fig.5 Schematic diagram of experimental platform
| 设备 | 主要参数 | 参数值 |
|---|---|---|
| 机器人 | 额定载荷/kg | 10 |
| 工作范围/mm | 1 393 | |
| 重复定位精度/mm | 0.05 | |
| 减速器 | LHSG, LHD系列 | |
机器人 控制器 | 处理器 | E3845,4核, 1.91 GHz |
| 操作系统 | Real Time Linux | |
| 算法运算周期/ms | 4 | |
激光 跟踪仪 | 测量范围/m | 2~80 |
| 精度/(mm·m-1) | 0.095+0.005 | |
| 分辨率/μm | 0.5 |
Table 1 Parameters of experiment platform
| 设备 | 主要参数 | 参数值 |
|---|---|---|
| 机器人 | 额定载荷/kg | 10 |
| 工作范围/mm | 1 393 | |
| 重复定位精度/mm | 0.05 | |
| 减速器 | LHSG, LHD系列 | |
机器人 控制器 | 处理器 | E3845,4核, 1.91 GHz |
| 操作系统 | Real Time Linux | |
| 算法运算周期/ms | 4 | |
激光 跟踪仪 | 测量范围/m | 2~80 |
| 精度/(mm·m-1) | 0.095+0.005 | |
| 分辨率/μm | 0.5 |
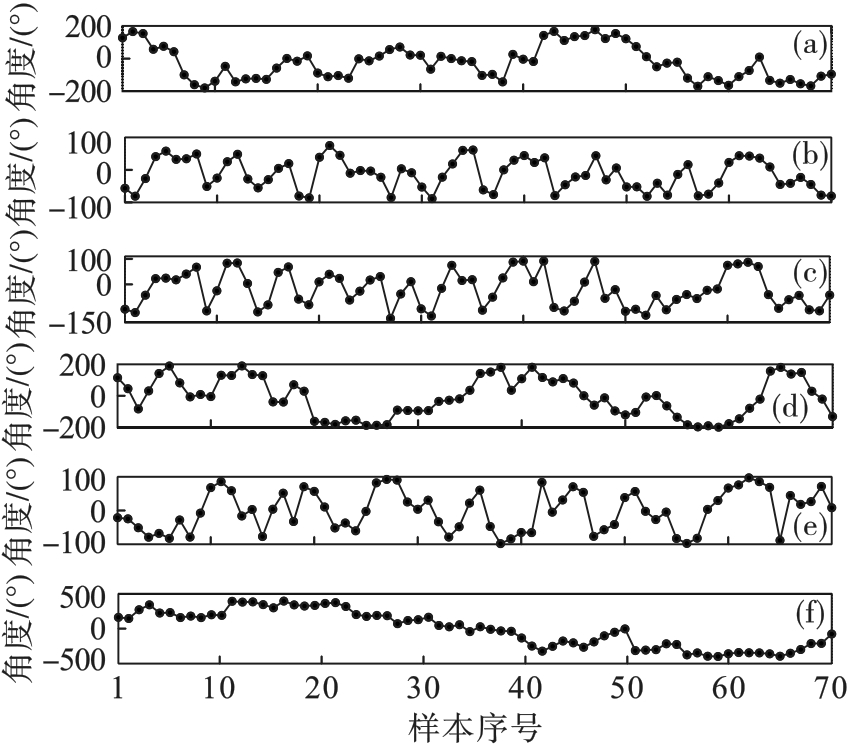
Fig.6 Curves of joint angle values in the each test set
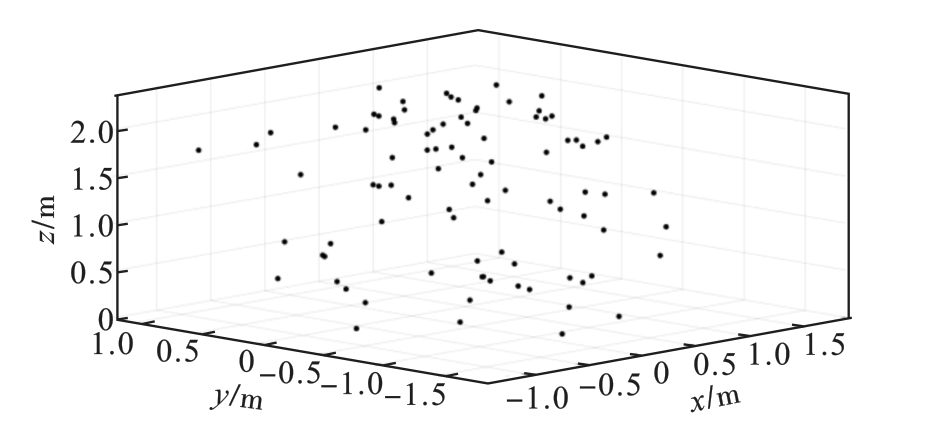
Fig.7 Spatial distribution diagram of test results (measuring coordinate)
| 项目 | ||||||
|---|---|---|---|---|---|---|
| 关节1 | 0 | 0 | 0 | 0 | 0 | 0 |
| 关节2 | 0.116 | 0 | 0 | 0.080 | -0.370 | 0 |
| 关节3 | 0 | 0 | 0.599 | 0.098 | 1.120 | -0.060 |
| 关节4 | 0 | 0.221 | 0.015 | 0.520 | 0 | 0 |
| 关节5 | -0.234 | 0 | -0.068 | 0 | 0.150 | 0.260 |
| 关节6 | 0 | 0.020 | -0.068 | 0 | 0 | 0.090 |
| 基坐标 | 4 418.2 | -418.2 | 1 100.9 | -0.9 | -4.6 | -3 085.0 |
| 工具坐标 | 0.294 | -0.169 | -0.100 | — | — | — |
Table2 List of calibration results
| 项目 | ||||||
|---|---|---|---|---|---|---|
| 关节1 | 0 | 0 | 0 | 0 | 0 | 0 |
| 关节2 | 0.116 | 0 | 0 | 0.080 | -0.370 | 0 |
| 关节3 | 0 | 0 | 0.599 | 0.098 | 1.120 | -0.060 |
| 关节4 | 0 | 0.221 | 0.015 | 0.520 | 0 | 0 |
| 关节5 | -0.234 | 0 | -0.068 | 0 | 0.150 | 0.260 |
| 关节6 | 0 | 0.020 | -0.068 | 0 | 0 | 0.090 |
| 基坐标 | 4 418.2 | -418.2 | 1 100.9 | -0.9 | -4.6 | -3 085.0 |
| 工具坐标 | 0.294 | -0.169 | -0.100 | — | — | — |
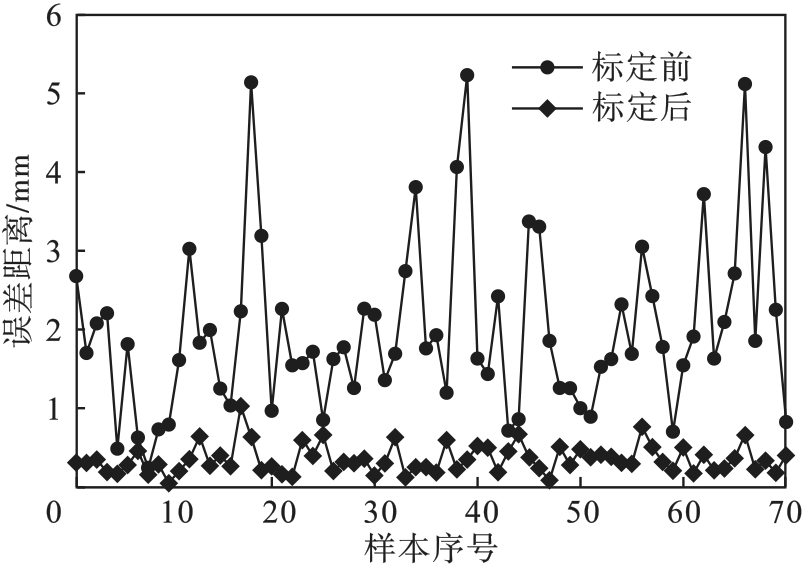
Fig.8 Error of position measurement values compared to theoretical values before and after calibration
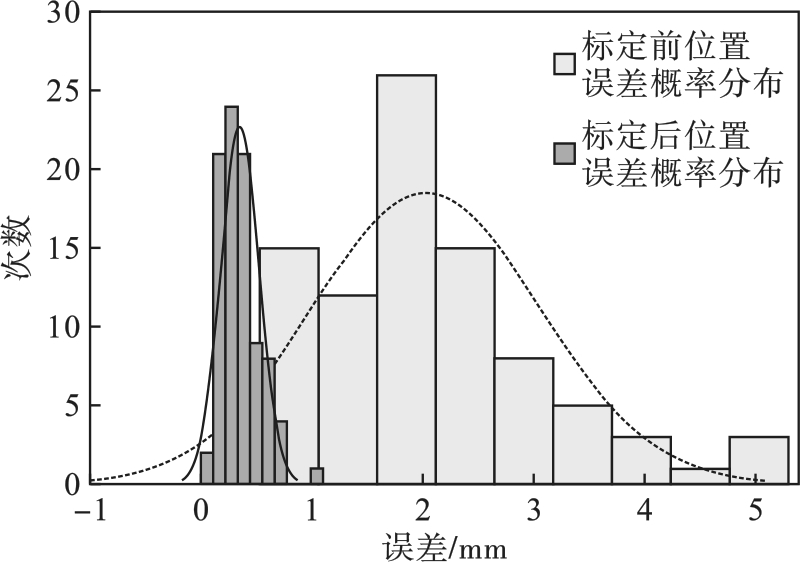
Fig.9 Probability distribution of position measurement error before and after calibration
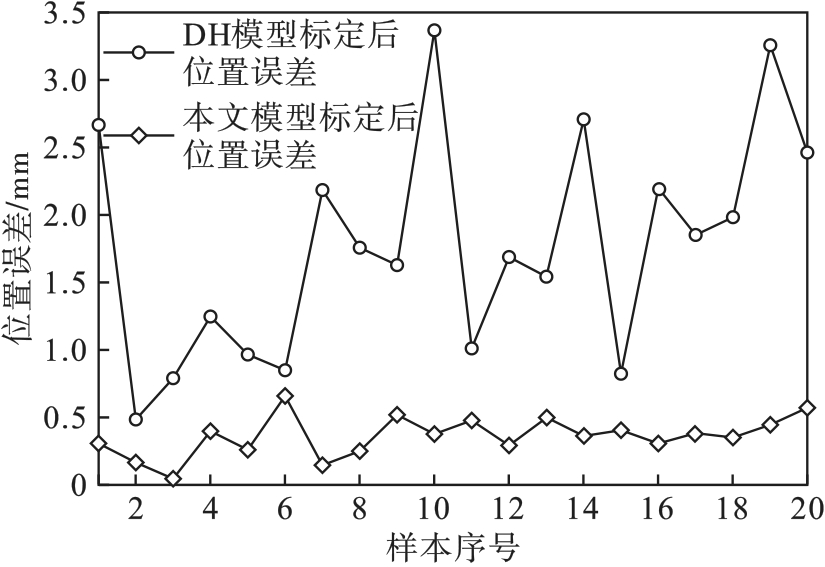
Fig.10 Error between measured and theoretical position values for the validation set
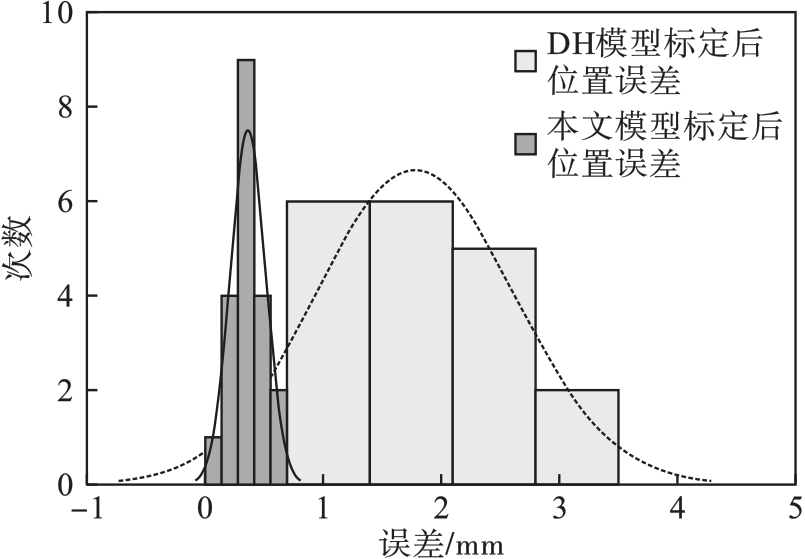
Fig.11 Probability distribution of position measurement error before and after calibration
| 1 | Roth Z, Mooring B, Ravani B. An overview of robot calibration[J]. IEEE Journal on Robotics and Automation, 1987, 3(5): 377-385. |
| 2 | Dumas C, Caro S, Chérif M, et al. A methodology for joint stiffness identification of serial robots[C]//2010 IEEE/RSJ International Conference on Intelligent Robots and Systems. Taipei, 2010: 464-469. |
| 3 | Yang K, Yang W Y, Cheng G D, et al. A new methodology for joint stiffness identification of heavy duty industrial robots with the counterbalancing system[J]. Robotics and Computer-Integrated Manufacturing, 2018, 53: 58-71. |
| 4 | Ginani L S, Motta J M S T. Theoretical and practical aspects of robot calibration with experimental verification[J]. Journal of the Brazilian Society of Mechanical Sciences and Engineering, 2011, 33(1): 15-21. |
| 5 | Ye S H, Wang Y, Ren Y J, et al. Robot calibration using iteration and differential kinematics[J]. Journal of Physics: Conference Series, 2006, 48: 1-6. |
| 6 | Jang J H, Kim S H, Kwak Y K. Calibration of geometric and non-geometric errors of an industrial robot[J]. Robotica, 2001, 19(3): 311-321. |
| 7 | Gong C H, Yuan J X, Ni J. Nongeometric error identification and compensation for robotic system by inverse calibration[J]. International Journal of Machine Tools and Manufacture, 2000, 40(14): 2119-2137. |
| 8 | Denavit J, Hartenberg R S. A kinematic notation for lower-pair mechanisms based on matrices[J]. Journal of Applied Mechanics, 1955, 22(2): 215-221. |
| 9 | Hayati S, Mirmirani M. Improving the absolute positioning accuracy of robot manipulators[J]. Journal of Robotic Systems, 1985, 2(4): 397-413. |
| 10 | Brockett R W. Robotic manipulators and the product of exponentials formula[C]// Mathematical Theory of Networks and Systems. Berlin: Springer Berlin Heidelberg, 1984: 120-129. |
| 11 | 高雷阜. 最优化理论与方法[M]. 沈阳: 东北大学出版社, 2005: 102-130. |
| Gao Lei-fu. Theory and methods of optimization[M]. Shenyang: Northeastern University Press, 2005: 102-130. | |
| 12 | Omodei A, Legnani G, Adamini R. Three methodologies for the calibration of industrial manipulators: experimental results on a SCARA robot[J]. Journal of Robotic Systems, 2000, 17(6): 291-307. |
| 13 | Nguyen H N, Zhou J, Kang H J. A calibration method for enhancing robot accuracy through integration of an extended Kalman filter algorithm and an artificial neural network[J]. Neurocomputing, 2015, 151: 996-1005. |
| 14 | 约翰 J. 克雷格. 机器人学导论:第4版[M]. 北京:机械工业出版社,2018:71-89. |
| John J. Craig. Introduction to robotics[M].4th ed. Beijing: China Machine Press, 2018: 71-89. | |
| 15 | Nubiola A, Bonev I A. Absolute calibration of an ABB IRB 1600 robot using a laser tracker[J]. Robotics and Computer-Integrated Manufacturing, 2013, 29(1): 236-245. |
| 16 | 毛晨涛. 工业机器人的运动学校准方法研究[D]. 杭州: 浙江大学, 2020. |
| Mao Chen-tao. Research on kinematics calibration method of industrial robot[D]. Hangzhou: Zhejiang University, 2020. | |
| 17 | Sun Y, Hollerbach J M. Observability index selection for robot calibration[C]//2008 IEEE International Conference on Robotics and Automation. Pasadena, 2008: 831-836. |
| 18 | Wang W, Liu F, Yun C. Calibration method of robot base frame using unit quaternion form[J]. Precision Engineering, 2015, 41: 47-54. |
| [1] | Peng-shuai HOU, Da-peng ZHOU, Da-peng YANG, Jie CHEN. Research on Positioning of Unmanned Carrier-Based Aircraft Based on Multi-sensor Fusion in Ship’s Surface Environment [J]. Journal of Northeastern University(Natural Science), 2024, 45(1): 1-9. |
| [2] | ZHAO Bin, WU Cheng-dong, JIANG Yang, SUN Ruo-huai. Robot Zero Calibration Method and Accuracy Evaluation for Spatial Parameter Clustering Identification [J]. Journal of Northeastern University(Natural Science), 2023, 44(6): 761-769. |
| [3] | ZHAO Yu-hui, QI Tian-shu, LU Peng-cheng. Research on Calibration Adaptation Method via Variational Inference for Near-Infrared Spectroscopy [J]. Journal of Northeastern University(Natural Science), 2023, 44(10): 1377-1383. |
| [4] | ZHAO Yu-hui, LU Peng-cheng, LIU Xiao-dong, QI Tian-shu. Research on Calibration Transfer via Correcting Distributions Difference [J]. Journal of Northeastern University(Natural Science), 2021, 42(3): 310-317. |
| [5] | SUN Wei, WANG Jin. Inverse Identification and Calibration of the Excitation Force of Non-contact Magnetic Field Exciter Based on Measured Response [J]. Journal of Northeastern University Natural Science, 2019, 40(12): 1760-1766. |
| [6] | HUANG Lei, HOU Zeng-xuan. Research on Pose Modeling and Precise Assembly Method for Large Cylinder-Tail Nozzles [J]. Journal of Northeastern University Natural Science, 2018, 39(12): 1748-1753. |
| [7] | LIU Xiao-zhi, QI Di-di, BEN Chi. Camera Calibration Method Based on Distortion Separation [J]. Journal of Northeastern University:Natural Science, 2017, 38(5): 620-624. |
| [8] | CUI Xiao-yu, ZHAO Yue, FAN Qun-an, WEI Yong-tao. Position Estimation for Single-Lens Stereovision System Using Prism [J]. Journal of Northeastern University Natural Science, 2015, 36(6): 765-768. |
| [9] | LI Hui, LIU Ying, WANG Yu, SUN Wei. A Calibration Method on Base Excitation Amplitude of Piezoelectric Ceramic Exciter [J]. Journal of Northeastern University Natural Science, 2015, 36(6): 832-837. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||