Journal of Northeastern University(Natural Science) ›› 2024, Vol. 45 ›› Issue (7): 984-991.DOI: 10.12068/j.issn.1005-3026.2024.07.010
• Mechanical Engineering • Previous Articles Next Articles
Li-xin GUO1( ), Ze-hao LI1,2, Ming-yang ZHAO2
), Ze-hao LI1,2, Ming-yang ZHAO2
Received:2023-02-03
Online:2024-07-15
Published:2024-10-29
Contact:
Li-xin GUO
About author:GUO Li-xinE-mail:lxguo@mail.neu.edu.cnCLC Number:
Li-xin GUO, Ze-hao LI, Ming-yang ZHAO. Design and Research of Fingertip Self-locking Underactuated Manipulators[J]. Journal of Northeastern University(Natural Science), 2024, 45(7): 984-991.
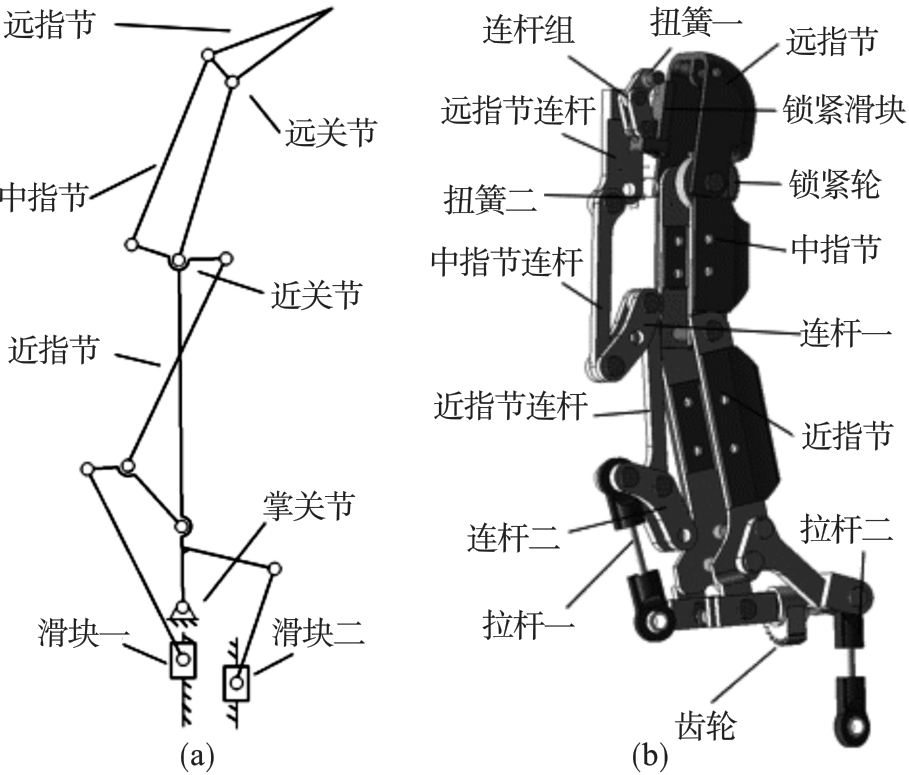
Fig.1 Finger structure
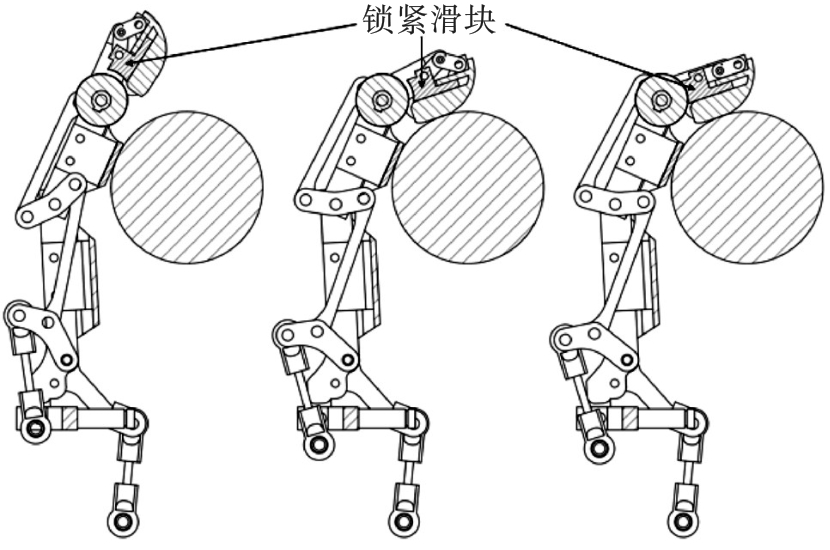
Fig.2 Fingertip self?locking process
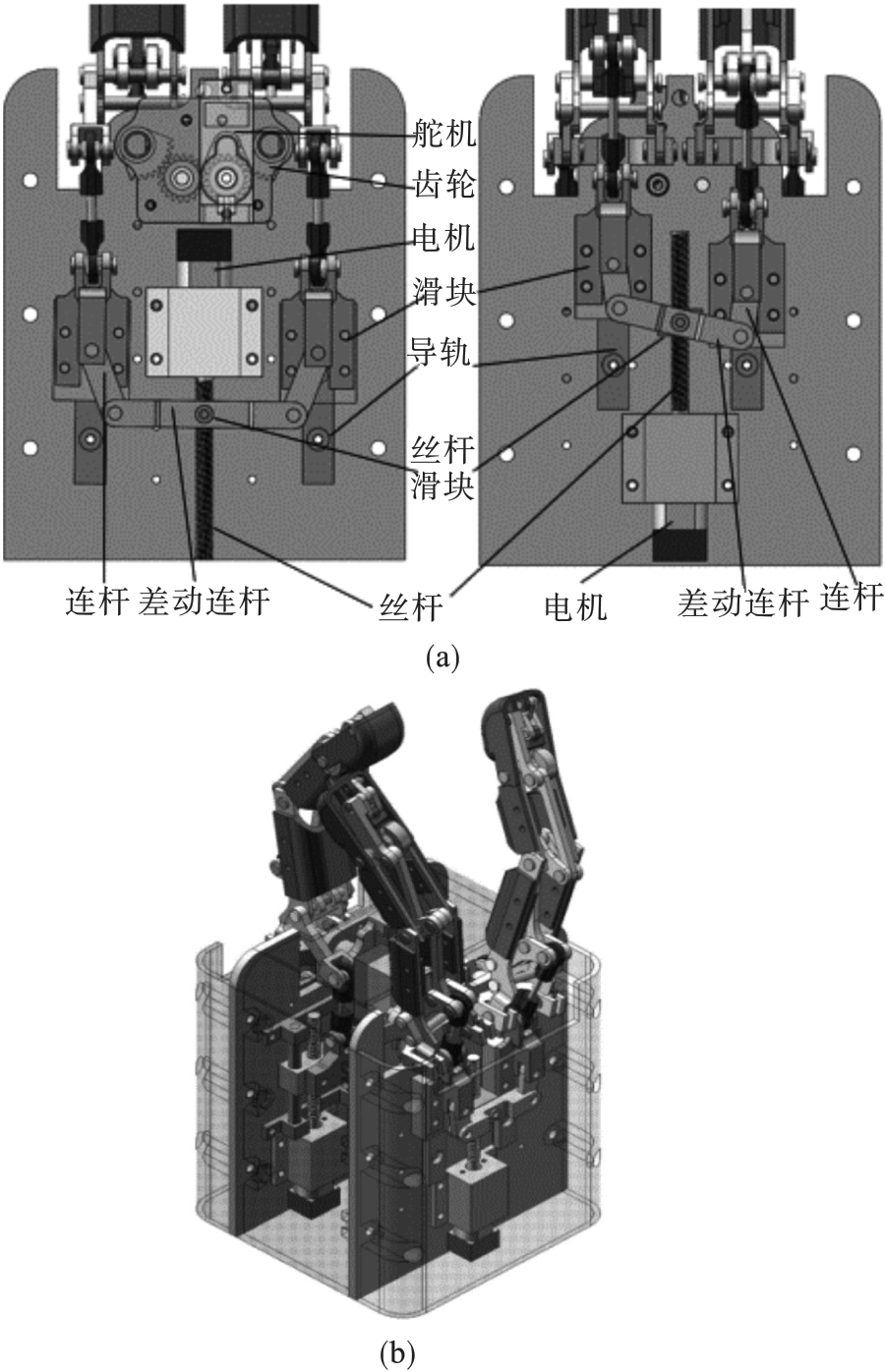
Fig.3 General assembly drawing of the manipulator
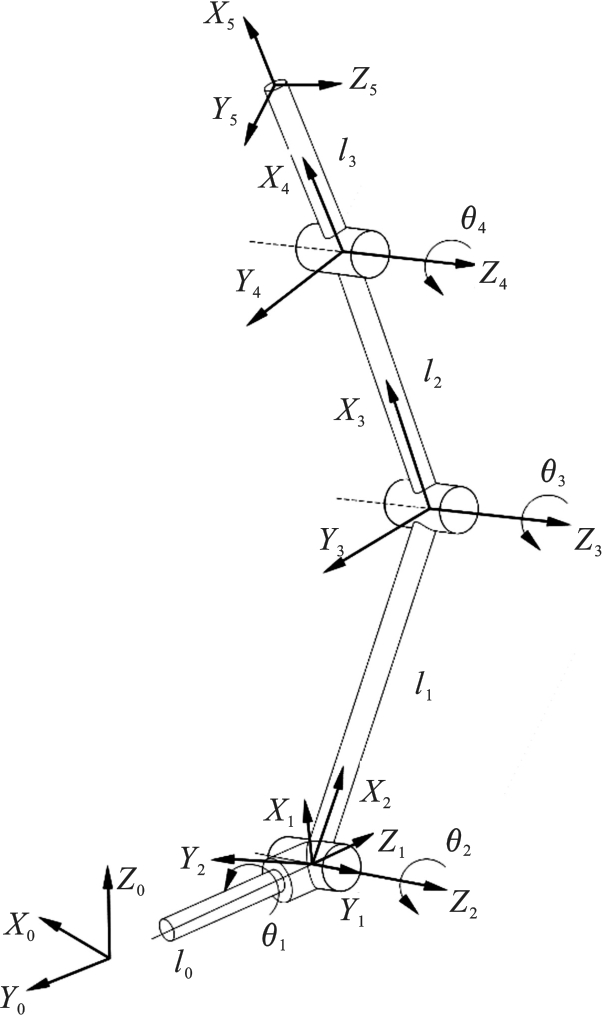
Fig.4 Coordinate diagram of the finger joint
| 关节号i | ||||
|---|---|---|---|---|
| 1 | 0 | 90 | ||
| 2 | 0 | -90 | 0 | |
| 3 | 0 | 0 | ||
| 4 | 0 | 0 | ||
| 5 | 0 | 0 | 0 |
Table 1 Finger D-H parameters
| 关节号i | ||||
|---|---|---|---|---|
| 1 | 0 | 90 | ||
| 2 | 0 | -90 | 0 | |
| 3 | 0 | 0 | ||
| 4 | 0 | 0 | ||
| 5 | 0 | 0 | 0 |
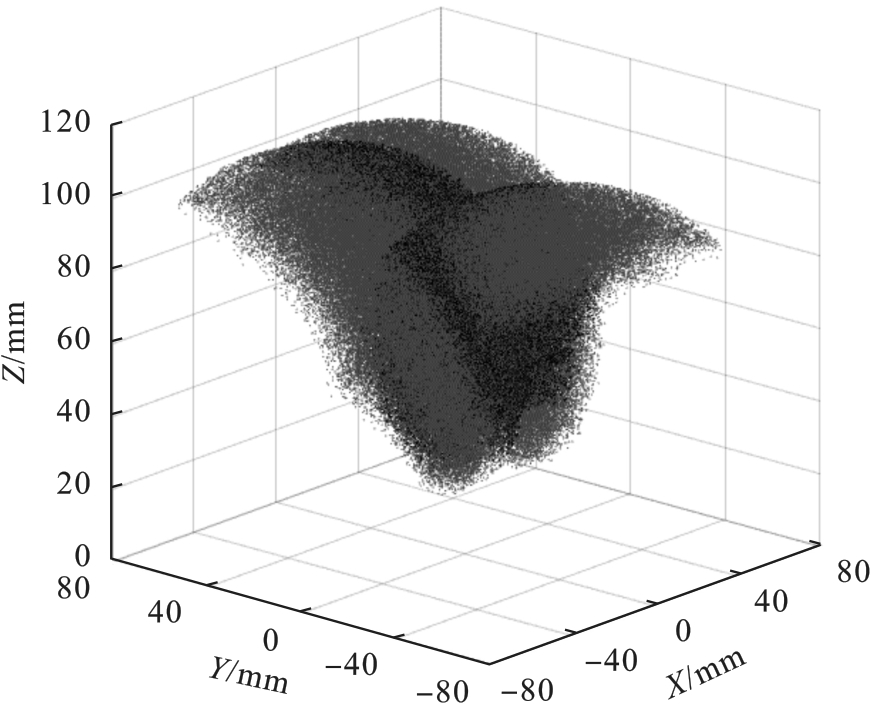
Fig.5 Working space of the manipulator finger
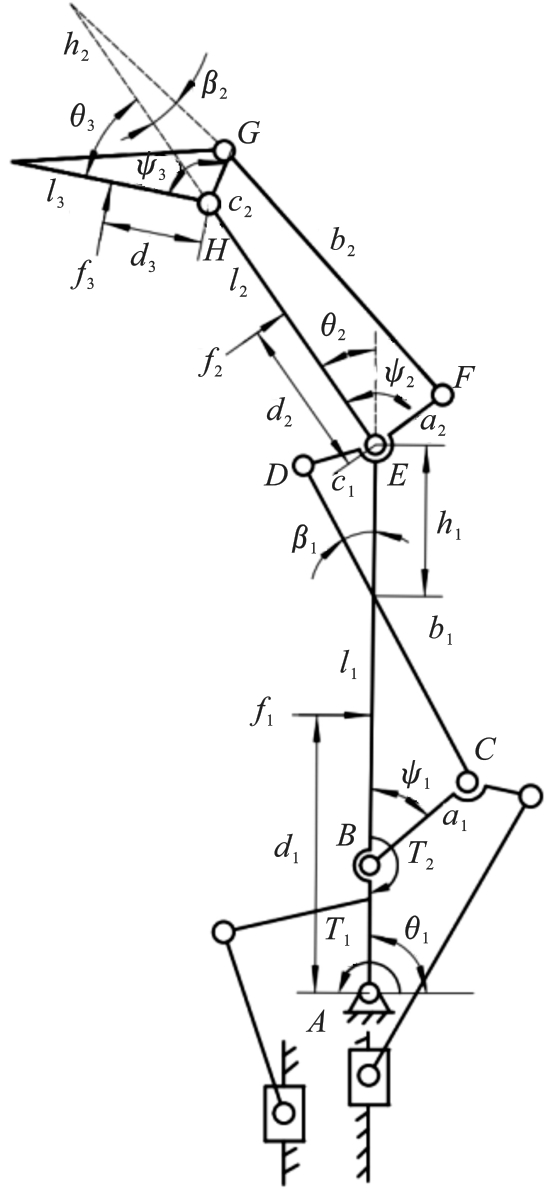
Fig.6 Static model of the underactuated finger

Fig.7 Finger movement simulation
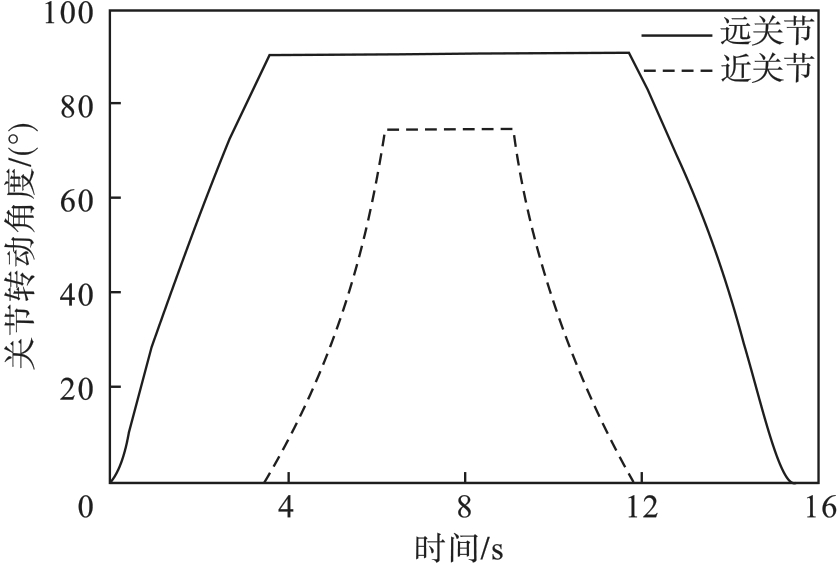
Fig.8 Biarticular movement angles
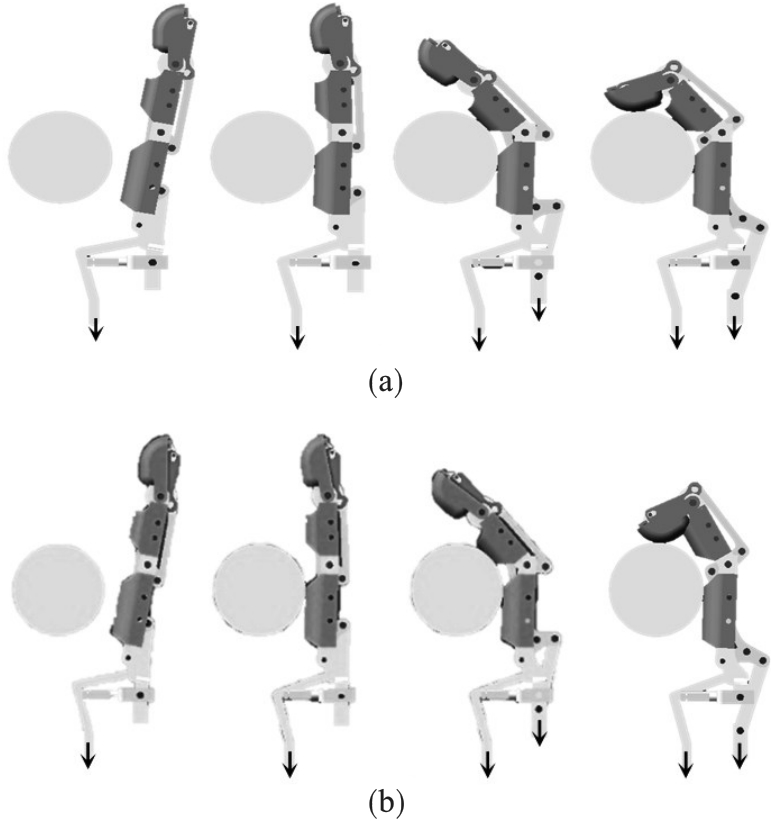
Fig.9 Envelope grasping simulation
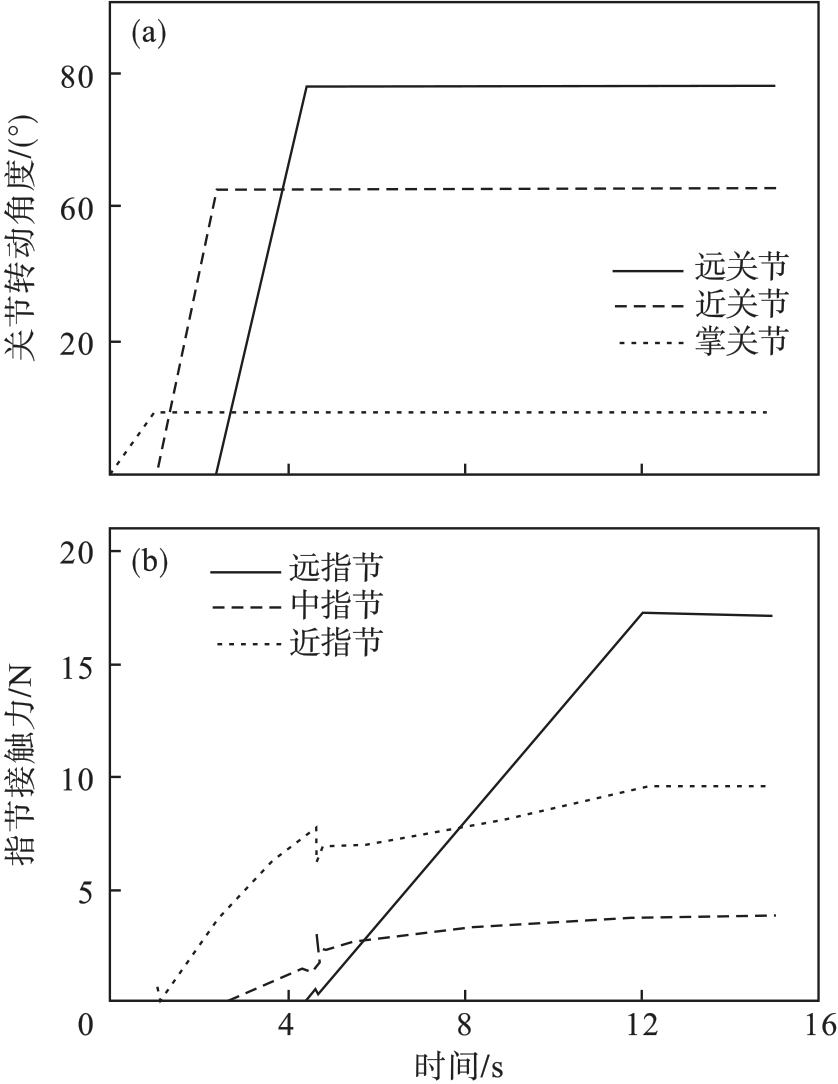
Fig.10 Envelope grasping joint angle and knuckle
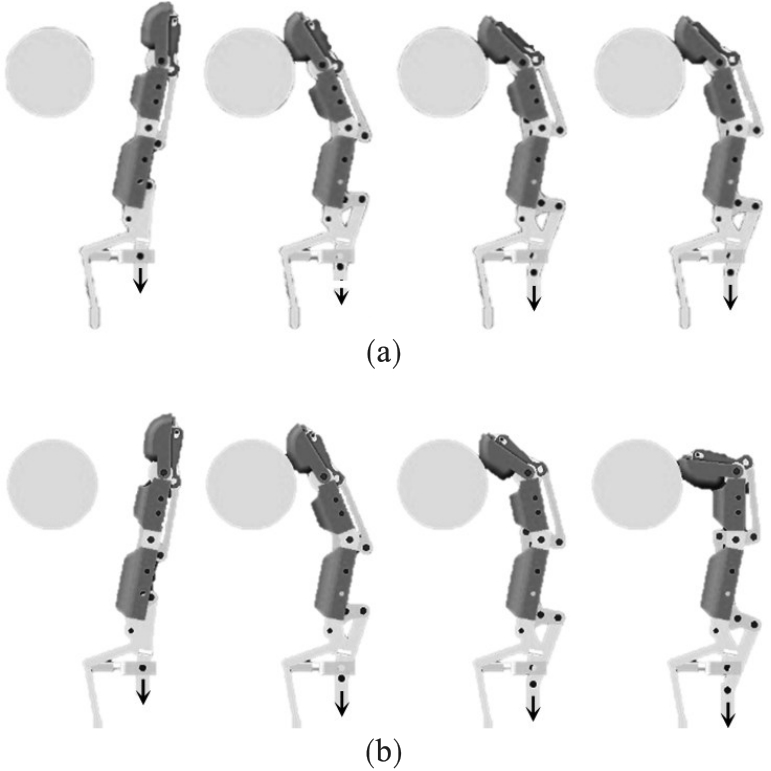
Fig.11 Fingertip grasping simulation
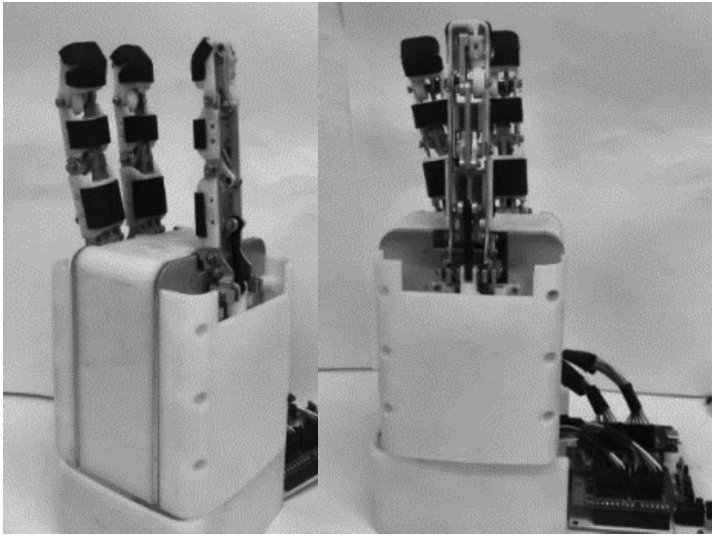
Fig.12 Prototype manipulator
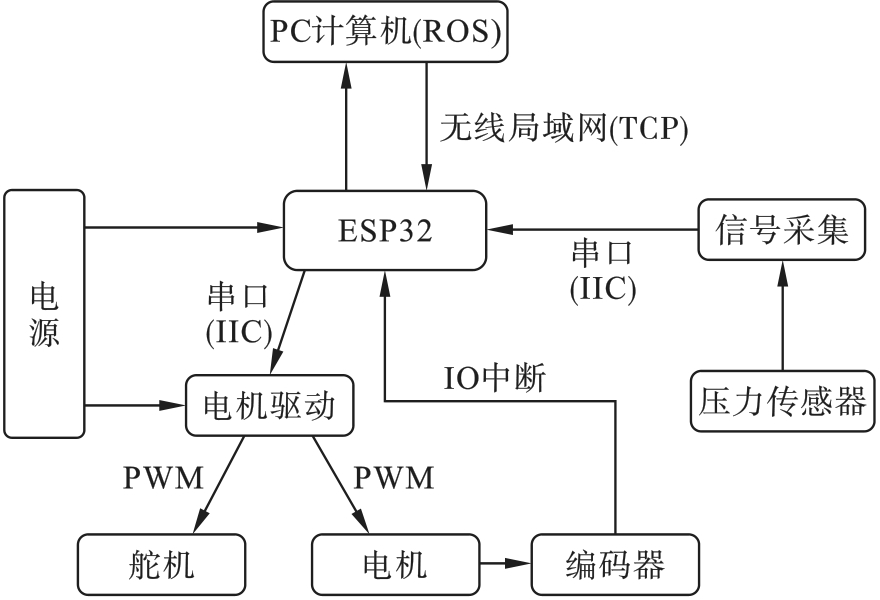
Fig.13 Underactuated manipulator control system
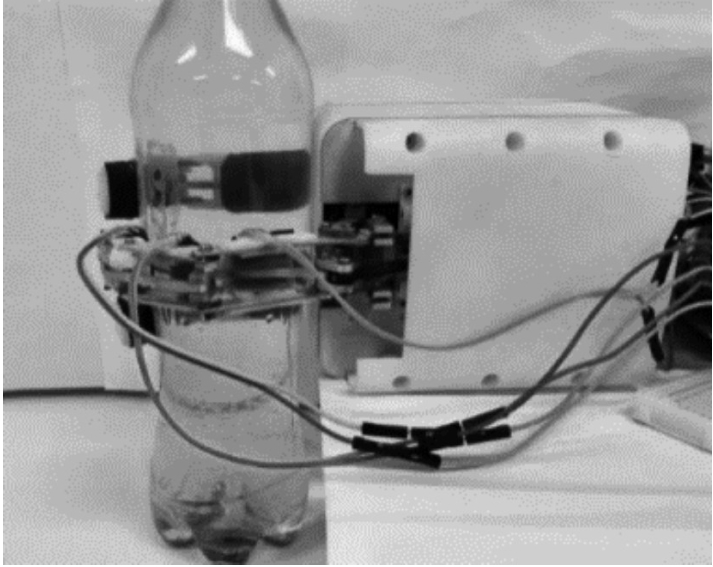
Fig.14 Manipulator envelope grasping
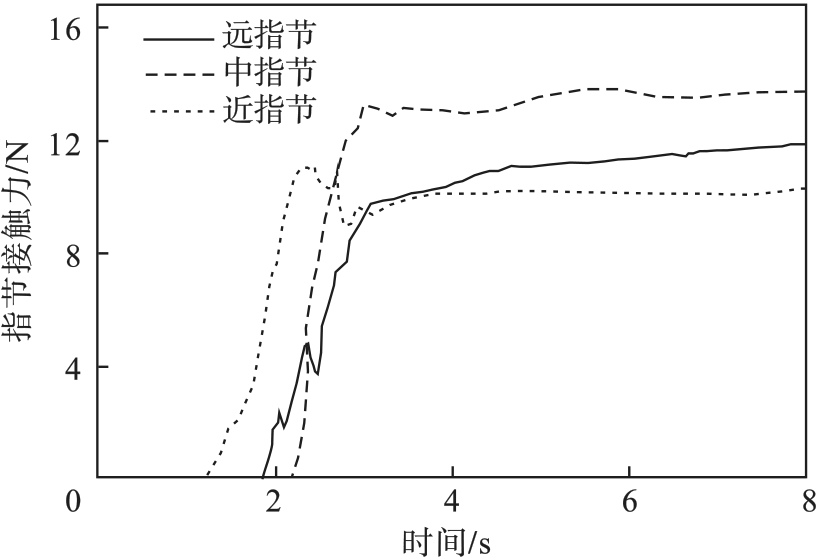
Fig.15 Manipulator’s envelope grasping contact force
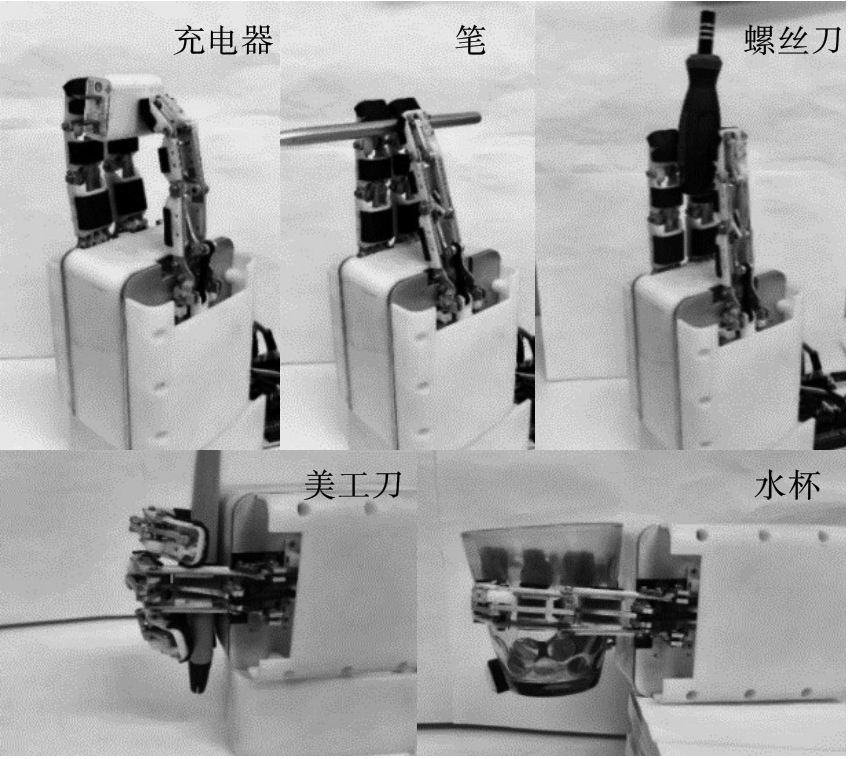
Fig.16 Different object grasping experiments
| 1 | Kochan A.Shadow delivers first hand[J].Industrial Robot,2005,32(1):15-16. |
| 2 | Ambrose R O, Aldridge H, Askew R S,et al.Robonaut:NASA’s space humanoid[J].IEEE Intelligent Systems and Their Applications,2000,15(4):57-63. |
| 3 | 刘伊威,金明河,樊绍巍,等.五指仿人机器人灵巧手DLR/HIT Hand Ⅱ[J].机械工程学报,2009,45(11):10-17. |
| Liu Yi‑wei, Jin Ming‑he, Fan Shao‑wei,et al.Five‑finger humanoid dexterous robot hand DLR/HIT hand II[J]Journal of Mechanical Engineering,2009,45(11):10-17. | |
| 4 | Laliberte T, Birglen L, Gosselin C.Underactuation in robotic grasping hands[J].Machine Intelligence & Robotic Control,2002,4(3):1-11. |
| 5 | Sadun A S, Jalani J, Jamil F.Grasping analysis for a 3‑finger adaptive robot gripper[C]// 2nd IEEE International Symposium on Robotics and Manufacturing Automation (ROMA).Ipoh,2016:1-6. |
| 6 | 金波,林龙贤.果蔬采摘欠驱动机械手爪设计及其力控制[J].机械工程学报,2014,50(19):1-8. |
| Jin Bo, Lin Long‑xian.Paw design and force control of underactuated fruit and vegetable picking manipulator [J].Journal of Mechanical Engineering,2014,50(19):1-8. | |
| 7 | Birglen L, Gosselin C M.Grasp‑state plane analysis of two‑phalanx underactuated fingers[J].Mechanism and Machine Theory,2006,41(7):807-822. |
| 8 | Kim U K, Jung D W, Jeong H Y,et al.Integrated linkage‑driven dexterous anthropomorphic robotic hand[J].Nature Communications,2021,12:7177. |
| 9 | Xu K, Liu H, Liu Z H,et al.A single‑actuator prosthetic hand using a continuum differential mechanism[C]// 2015 IEEE International Conference on Robotics and Automation (ICRA).Seattle,2015:6457-6462. |
| 10 | Birglen L, Gosselin C M.Force analysis of connected differential mechanisms:application to grasping[J].The International Journal of Robotics Research,2006,25(10):1033-1046. |
| 11 | Zheng X S, Zheng Y J, Shuai Y,et al.Kinematics analysis and trajectory planning of 6‑DOF robot[C]// IEEE 3rd Information Technology.Chengdu,2019:1749-1754. |
| 12 | 马涛.一种新型柔性仿人机械手的优化设计研究[D].天津:河北工业大学,2020. |
| Ma Tao.Research on optimization design of a new flexible humanoid manipulator [D].Tianjin:Hebei University of Technology,2020. | |
| 13 | 郭一典,霍良青,张奇峰,等.水下欠驱动机械手结构设计与仿真分析[J].现代制造工程,2021(8):48-55. |
| Guo Yi‑dian, Huo Liang‑qing, Zhang Qi‑feng,et al.Structural design and simulation analysis of underwater underactuated manipulator [J].Modern Manufacturing Engineering,2021(8):48-55. | |
| 14 | Birglen L, Gosselin C M.Kinetostatic analysis of underactuated fingers[J].IEEE Transactions on Robotics and Automation,2004,20(2):211-221. |
| [1] | Xiao-peng LI, Sai-nan ZHOU, Jia-qi LIU, Meng YIN. Vibration Suppression of Dual-Flexible Manipulator with Fuzzy Tuning PI Parameters [J]. Journal of Northeastern University(Natural Science), 2024, 45(2): 217-225. |
| [2] | LI Xiao-peng, ZHOU Sai-nan, YIN Meng, FAN Xing. PI Control Strategy of Double-Flexible Manipulator’s Servo System [J]. Journal of Northeastern University(Natural Science), 2023, 44(5): 642-651. |
| [3] | GAO Yue, FANG Li-jin, XU Ji-qian, GONG Yun-peng. Structural Design of a 7-DOF Manipulator and Its Geometric Position Error Analysis [J]. Journal of Northeastern University(Natural Science), 2022, 43(7): 1003-1010. |
| [4] | MA Shu-jun, JIN Tie-zheng, WANG Ying-lei, BAI Xin-hui. A Fast Tracking Strategy for Uncalibrated Visual Servo System [J]. Journal of Northeastern University Natural Science, 2020, 41(3): 355-360. |
| [5] | WANG Hai-fang, LI Xin-qing, QIAO Xiang-yang, QI Chao-fei. Simulation of 3-SPS/S Parallel Manipulator Control System for Ankle Rehabilitation [J]. Journal of Northeastern University Natural Science, 2019, 40(3): 310-315. |
| [6] | WANG Hong, ZHENG Tian-qi, JI Li, LU Zhi-guo. Six-Axis Manipulator’s Sliding Mode Robust Control Based on T-S Fuzzy Compensation [J]. Journal of Northeastern University Natural Science, 2018, 39(3): 378-383. |
| [7] | HUANG Qiu-jun, ZHANG Kai, SONG Jin-chun, YU Zhong-liang. Path Synthesis Optimal Design of Pick-Up Manipulator Based on Modified Particle Swarm Optimization [J]. Journal of Northeastern University Natural Science, 2018, 39(11): 1636-1641. |
| [8] | WANG Hong, ZHENG Tian-qi. RBF Network Adaptive Control Based on SMC Compensation for Six-axis Manipulator [J]. Journal of Northeastern University Natural Science, 2017, 38(11): 1601-1606. |
| [9] | JIANG Wei, WU Gong-ping, CAO Qi, YANG Song. RBF Neural Network Control of Live Operation Robot Manipulator for High Voltage Transmission Line [J]. Journal of Northeastern University Natural Science, 2017, 38(10): 1388-1394. |
| [10] | ZHENG Yan, JIANG Yue. Trajectory Tracking Control of Robotic Manipulator System Based on Iterative Learning Algorithm [J]. Journal of Northeastern University Natural Science, 2014, 35(6): 765-768. |
| [11] | CHEN Jin, MA Jin-cheng, GUO Xiao-feng, SUN Zhen-ye. Performance Analysis of Wind Turbine Blade Based on Parametric Modeling [J]. Journal of Northeastern University Natural Science, 2014, 35(12): 1768-1772. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||