东北大学学报(自然科学版) ›› 2024, Vol. 45 ›› Issue (7): 974-983.DOI: 10.12068/j.issn.1005-3026.2024.07.009
单泉( ), 张顺, 黄建聪, 陈砚
), 张顺, 黄建聪, 陈砚
收稿日期:2023-03-15
出版日期:2024-07-15
发布日期:2024-10-29
通讯作者:
单泉
基金资助:
Quan SHAN(), Shun ZHANG, Jian-cong HUANG, Yan CHEN
Received:2023-03-15
Online:2024-07-15
Published:2024-10-29
Contact:
Quan SHAN
About author:SHAN QuanE-mail:shanquan@neuq.edu.cn摘要:
为解决脑卒中患者在主动康复训练过程中因患者个体差异导致的训练强度不足或过强问题,提出了一种基于模糊规则的上肢康复机器人自适应交互控制系统.针对不同病情患者的肌力差异,设计模糊自适应阻抗控制器.控制器基于人机交互力和系统误差,利用模糊推理对阻尼和刚度系数进行自适应调节,改变训练强度,实现康复机器人按需辅助控制.为保证康复训练过程中运动轨迹的准确跟踪,设计GA-FuzzyPID控制器,基于改进遗传算法对模糊规则隶属度函数和规则库进行优化,降低康复机器人轨迹跟踪误差.基于Matlab/Simulink对系统进行轨迹跟踪和自适应阻抗控制仿真实验.结果表明,轨迹跟踪实验中,GA-FuzzyPID控制器的轨迹误差相较于PID控制器和FuzzyPID控制器分别降低了55.9%和34.0%,有效提高了轨迹跟踪精度;自适应阻抗控制实验通过与固定阻抗方法进行对比,验证了所提自适应交互控制系统的有效性和可行性.
中图分类号:
单泉, 张顺, 黄建聪, 陈砚. 上肢康复机器人模糊自适应交互控制研究[J]. 东北大学学报(自然科学版), 2024, 45(7): 974-983.
Quan SHAN, Shun ZHANG, Jian-cong HUANG, Yan CHEN. Research on Fuzzy Adaptive Interactive Control of Upper Limb Rehabilitation Robots[J]. Journal of Northeastern University(Natural Science), 2024, 45(7): 974-983.
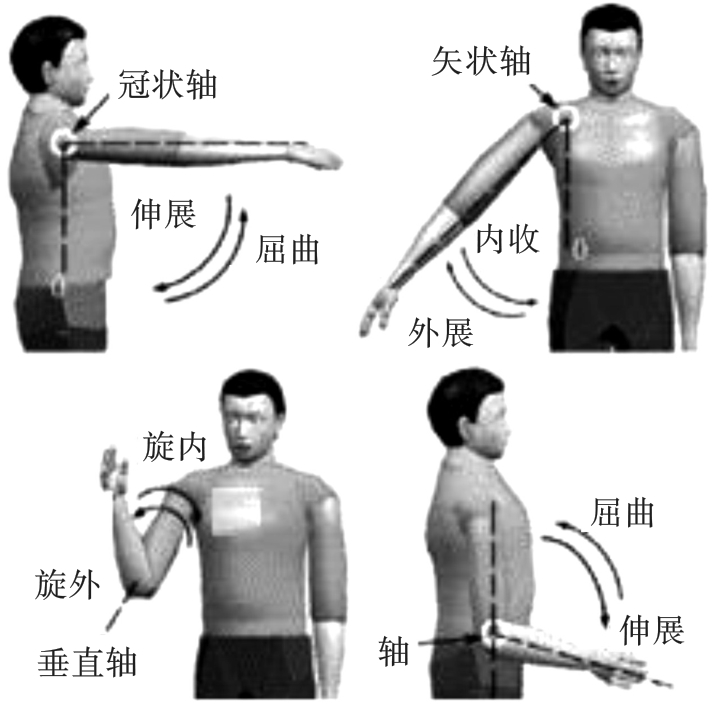
图1 肩肘关节运动示意图
Fig.1 Schematic diagram of shoulder and elbow joint movement
| 关节 | 运动类型 | 角度/(°) |
|---|---|---|
| 肩关节 | 屈曲 | 0~180 |
| 伸展 | 0~50 | |
| 外展 | 0~60 | |
| 内收 | 0~45 | |
| 肘关节 | 旋外 | 0~80 |
| 旋内 | 0~100 | |
| 屈曲 | 0~145 | |
| 伸展 | 0~5 |
表1 肩肘关节活动范围
Table1 Range of shoulder and elbow jointmotion
| 关节 | 运动类型 | 角度/(°) |
|---|---|---|
| 肩关节 | 屈曲 | 0~180 |
| 伸展 | 0~50 | |
| 外展 | 0~60 | |
| 内收 | 0~45 | |
| 肘关节 | 旋外 | 0~80 |
| 旋内 | 0~100 | |
| 屈曲 | 0~145 | |
| 伸展 | 0~5 |
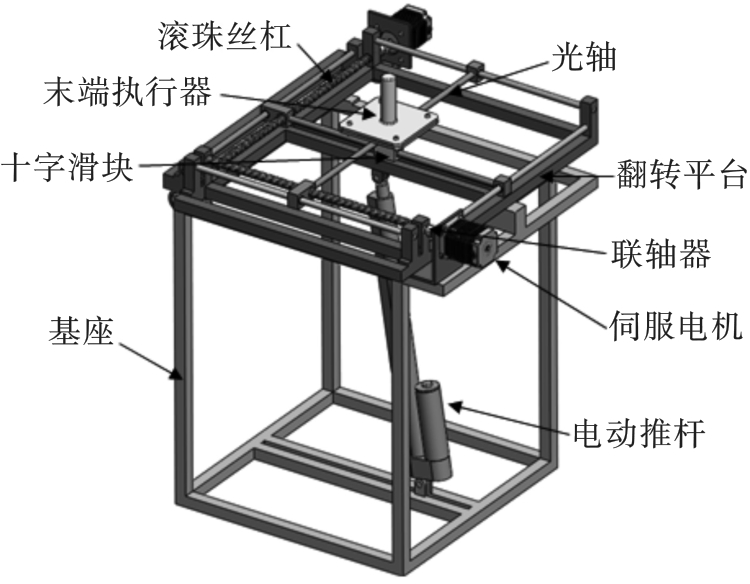
图2 上肢康复机器人模型
Fig. 2 Upper limb rehabilitation robot model
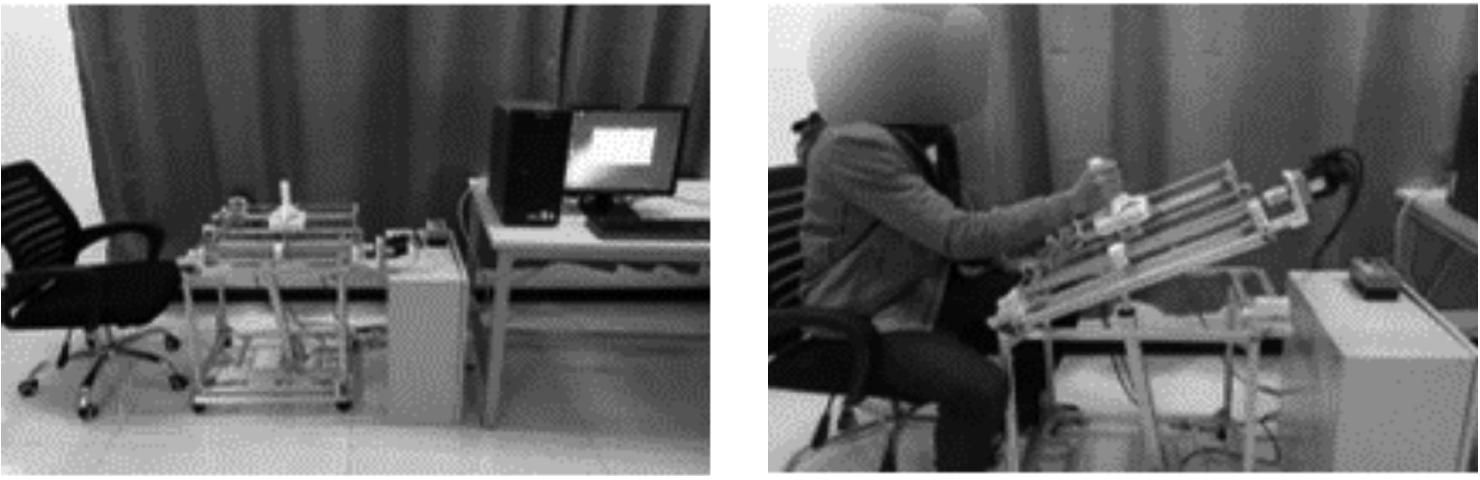
图3 上肢康复机器人样机及人机交互演示AB=XAYAZA,Bm=xAyAzA,BB=XBYBZB,OB=00h,RmB=uxvxwxuyvywyuzvzwz,
Fig.3 Upper limb rehabilitation robot prototype and human?machine interaction demonstration
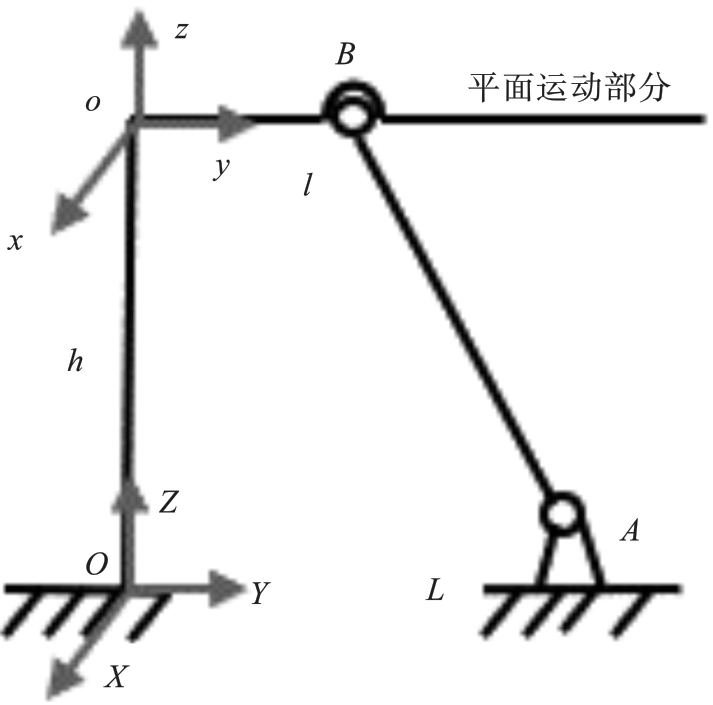
图4 上肢康复机器人简图
Fig.4 Schematic diagram of the upper limb rehabilitation robot
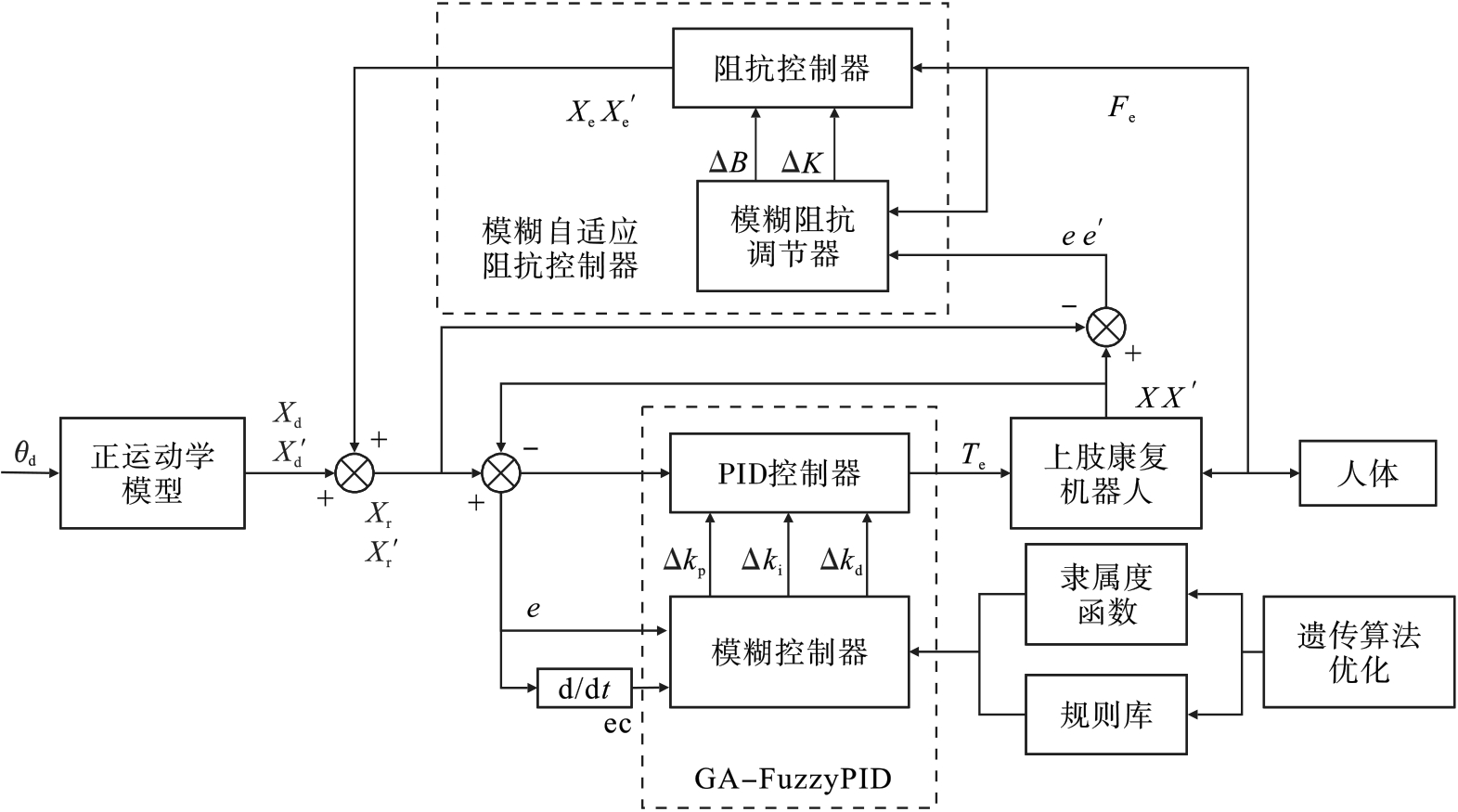
图5 模糊自适应交互控制系统原理图
Fig.5 Schematic diagram of the fuzzy adaptive interactive control system
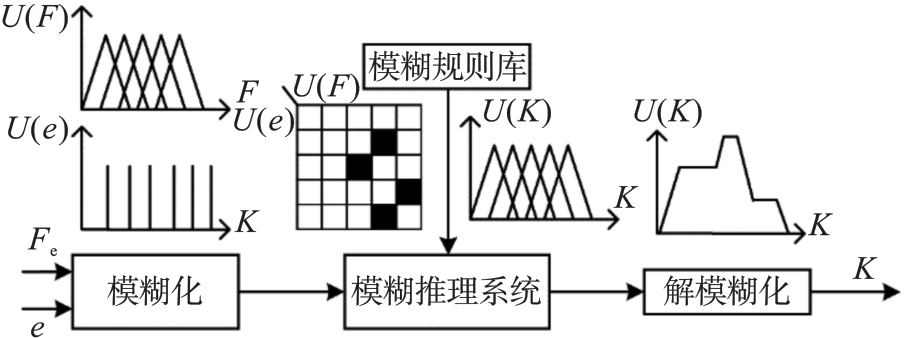
图6 模糊规则原理图
Fig.6 Fuzzy rule schematic
| e | Fe | ||||
|---|---|---|---|---|---|
| NL | NS | ZE | PS | PL | |
| NL | NL | NL | NS | ZE | ZE |
| NS | NL- | NS | NS | ZE | PS |
| ZE | NS | NS | ZE | PS | PS |
| PS | NS | ZE | PS | PS | PL |
| PL | ZE | ZE | PS | PL | PL |
表2 刚度参数模糊规则表
Table2 Fuzzy rule table of stiffness parameters
| e | Fe | ||||
|---|---|---|---|---|---|
| NL | NS | ZE | PS | PL | |
| NL | NL | NL | NS | ZE | ZE |
| NS | NL- | NS | NS | ZE | PS |
| ZE | NS | NS | ZE | PS | PS |
| PS | NS | ZE | PS | PS | PL |
| PL | ZE | ZE | PS | PL | PL |
| e′ | Fe | ||||
|---|---|---|---|---|---|
| NL | NS | ZE | PS | PL | |
| NL | NL | NS | NS | ZE | PS |
| NS | NL | NS | NS | ZE | PS |
| ZE | NS | ZE | ZE | PS | PL |
| PS | NS | ZE | PS | PS | PL |
| PL | NS | PS | PS | PL | PL |
表3 阻尼参数模糊规则表
Table3 Fuzzy rule table of damping parameters
| e′ | Fe | ||||
|---|---|---|---|---|---|
| NL | NS | ZE | PS | PL | |
| NL | NL | NS | NS | ZE | PS |
| NS | NL | NS | NS | ZE | PS |
| ZE | NS | ZE | ZE | PS | PL |
| PS | NS | ZE | PS | PS | PL |
| PL | NS | PS | PS | PL | PL |
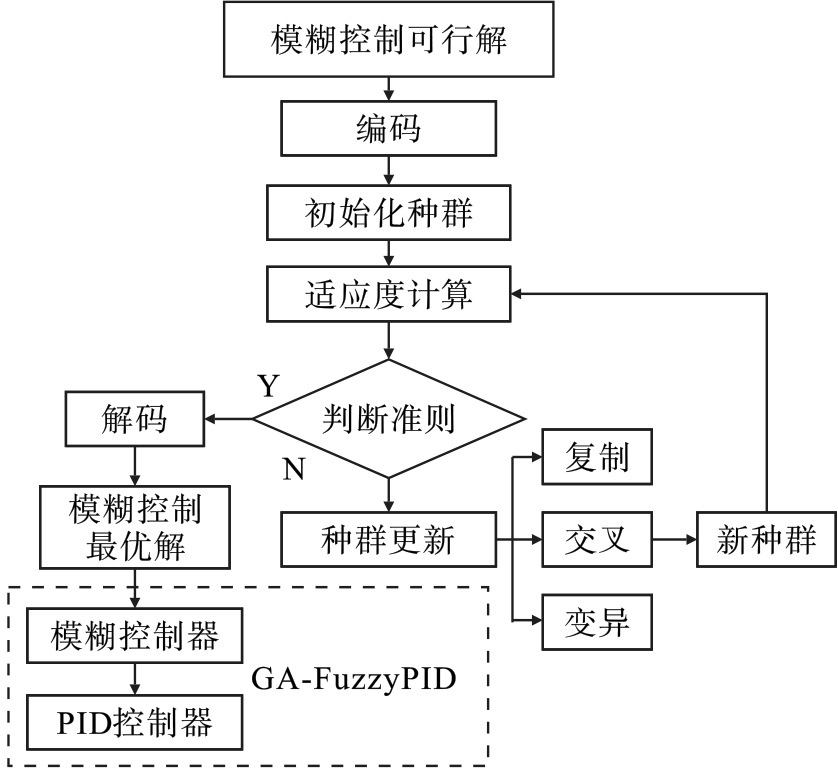
图7 遗传算法优化模糊规则流程图
Fig.7 Flowchart of fuzzy rule optimization by genetic algorithm
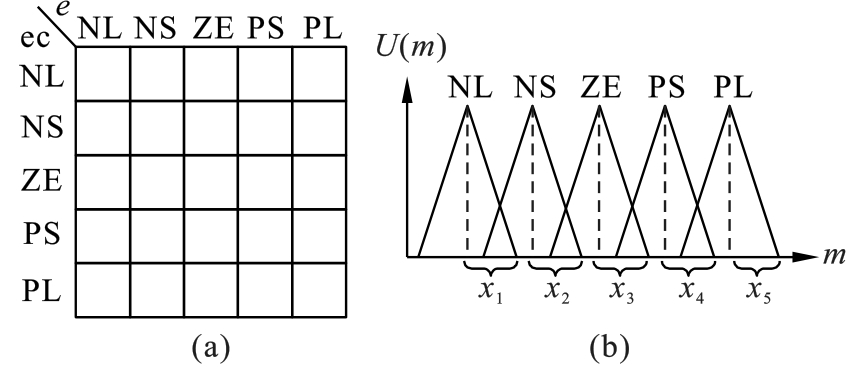
图8 模糊规则(a)—模糊规则库; (b)—隶属度函数.
Fig.8 Fuzzy rules
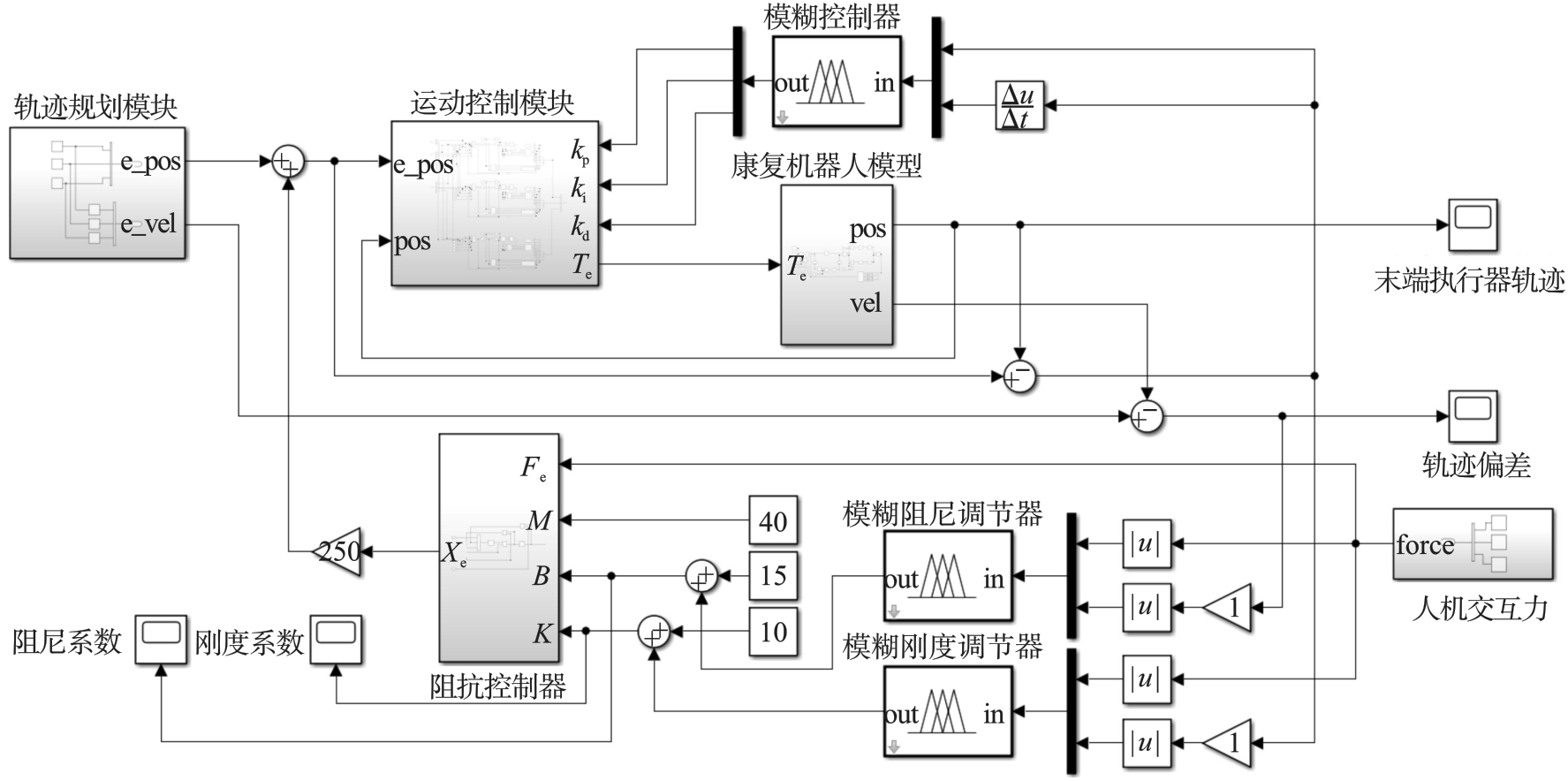
图9 自适应交互控制系统仿真模型
Fig.9 Simulation model of the adaptive interactive control system
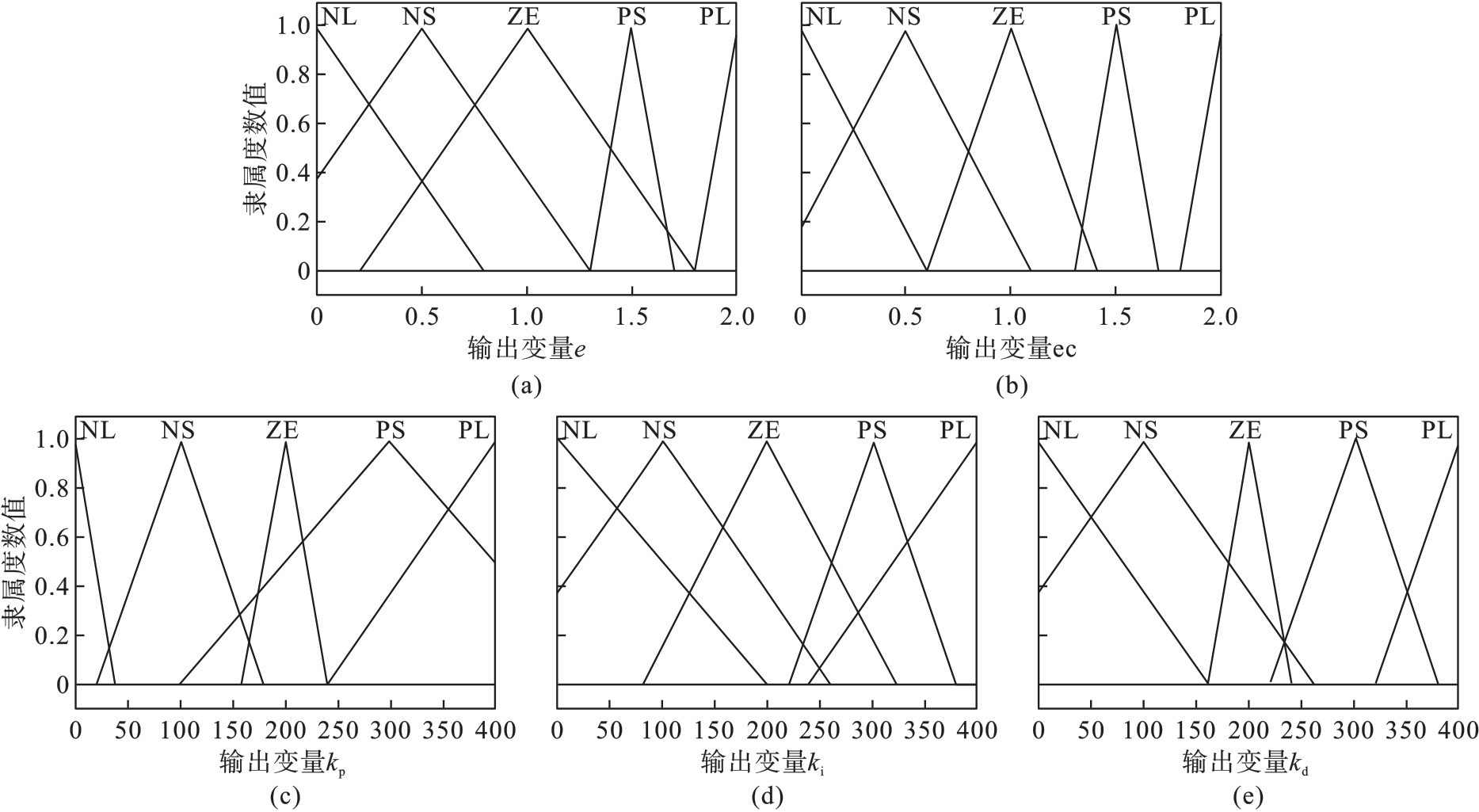
图10 最优隶属度曲线(a)—e; (b)—ec; (c)—kp; (d)—ki; (e)—kd.
Fig.10 Optimal membership curves
| ec | e | ||||
|---|---|---|---|---|---|
| NL | NS | ZE | PS | PL | |
| NL | ZE | PL | PL | ZE | NL |
| NS | PS | NL | ZE | PL | PL |
| ZE | PS | PS | NS | ZE | PS |
| PS | NL | NS | ZE | PS | PS |
| PL | NL | NS | ZE | ZE | ZE |
表4 kp模糊规则库
Table 4 kp fuzzy rule base
| ec | e | ||||
|---|---|---|---|---|---|
| NL | NS | ZE | PS | PL | |
| NL | ZE | PL | PL | ZE | NL |
| NS | PS | NL | ZE | PL | PL |
| ZE | PS | PS | NS | ZE | PS |
| PS | NL | NS | ZE | PS | PS |
| PL | NL | NS | ZE | ZE | ZE |
| ec | e | ||||
|---|---|---|---|---|---|
| NL | NS | ZE | PS | PL | |
| NL | NS | PS | NS | ZE | PL |
| NS | NL | ZE | NL | PS | PL |
| ZE | ZE | PS | ZE | NS | NL |
| PS | PS | PS | PS | NS | PL |
| PL | PS | PL | PL | PL | PS |
表5 ki模糊规则库
Table 5 ki fuzzy rule base
| ec | e | ||||
|---|---|---|---|---|---|
| NL | NS | ZE | PS | PL | |
| NL | NS | PS | NS | ZE | PL |
| NS | NL | ZE | NL | PS | PL |
| ZE | ZE | PS | ZE | NS | NL |
| PS | PS | PS | PS | NS | PL |
| PL | PS | PL | PL | PL | PS |
| ec | e | ||||
|---|---|---|---|---|---|
| NL | NS | ZE | PS | PL | |
| NL | NS | PS | PL | ZE | PL |
| NS | NS | NS | PS | NS | PL |
| ZE | NL | ZE | PS | PS | NS |
| PS | PS | PS | ZE | ZE | ZE |
| PL | ZE | PL | PS | ZE | NS |
表6 kd模糊规则库
Table6 kd fuzzy rule base
| ec | e | ||||
|---|---|---|---|---|---|
| NL | NS | ZE | PS | PL | |
| NL | NS | PS | PL | ZE | PL |
| NS | NS | NS | PS | NS | PL |
| ZE | NL | ZE | PS | PS | NS |
| PS | PS | PS | ZE | ZE | ZE |
| PL | ZE | PL | PS | ZE | NS |
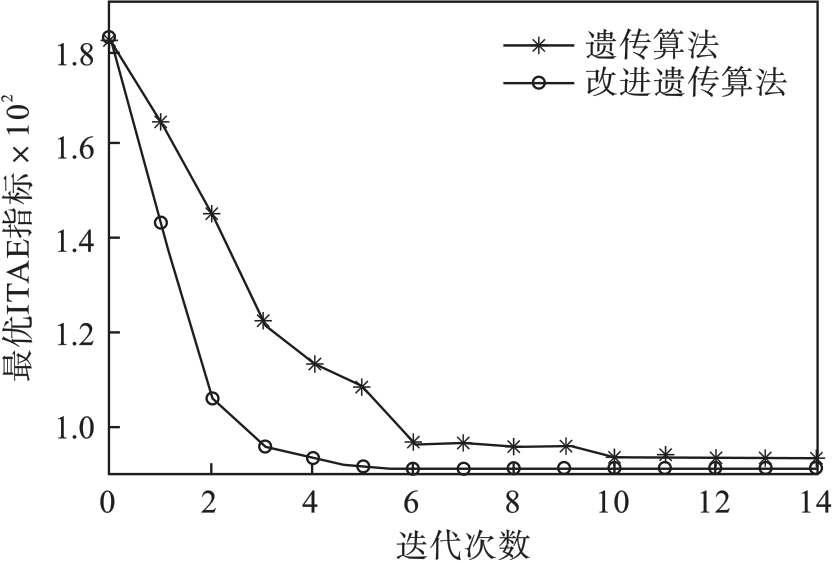
图11 遗传算法迭代对比
Fig.11 Iterative comparison of genetic algorithms
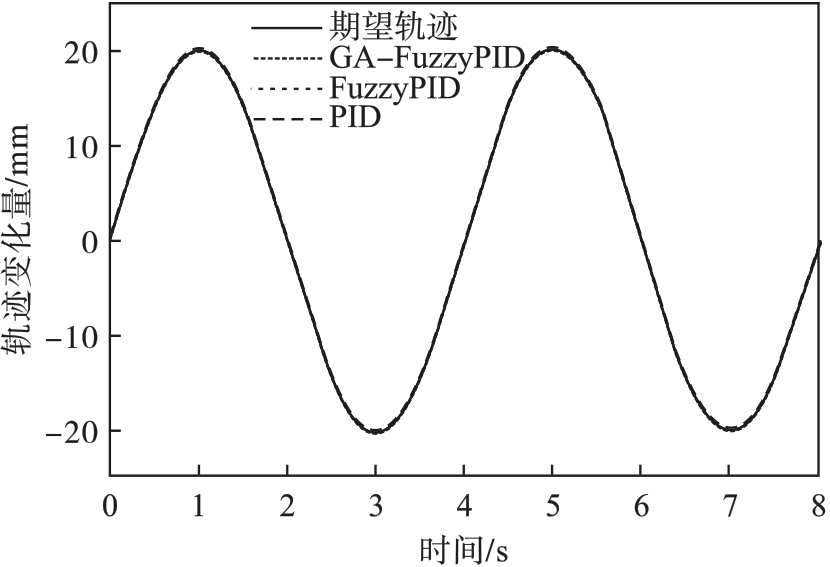
图12 轨迹跟踪曲线
Fig.12 Trajectory tracking curve
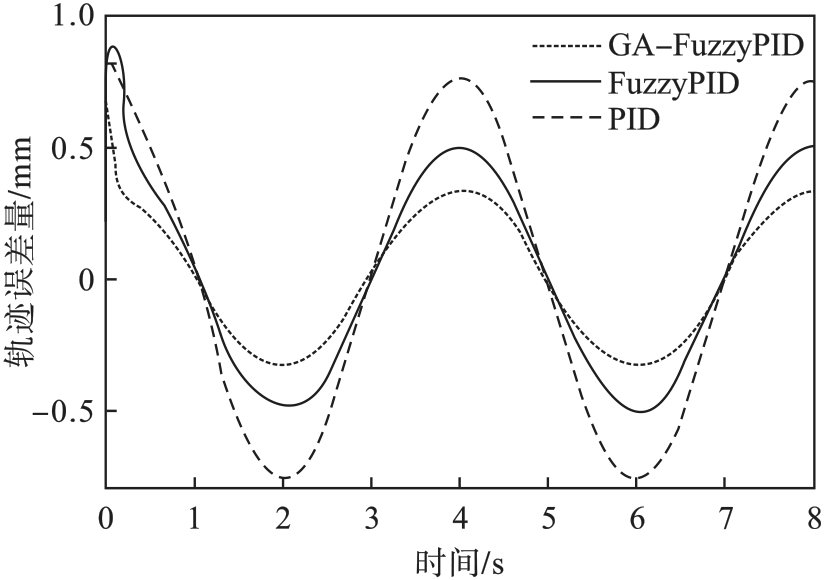
图13 轨迹跟踪误差
Fig.13 Trajectory tracking error
| 控制器 | 性能指标 | |||
|---|---|---|---|---|
| max( | ISE | ITSE | ITAE | |
| PID | 0.752 | 3.343 | 20.24 | 34.37 |
| FuzzyPID | 0.503 | 1.568 | 8.982 | 22.89 |
| GA-FuzzyPID | 0.332 | 0.685 | 3.991 | 15.26 |
表7 控制器性能指标
Table7 Controller performance indicators
| 控制器 | 性能指标 | |||
|---|---|---|---|---|
| max( | ISE | ITSE | ITAE | |
| PID | 0.752 | 3.343 | 20.24 | 34.37 |
| FuzzyPID | 0.503 | 1.568 | 8.982 | 22.89 |
| GA-FuzzyPID | 0.332 | 0.685 | 3.991 | 15.26 |
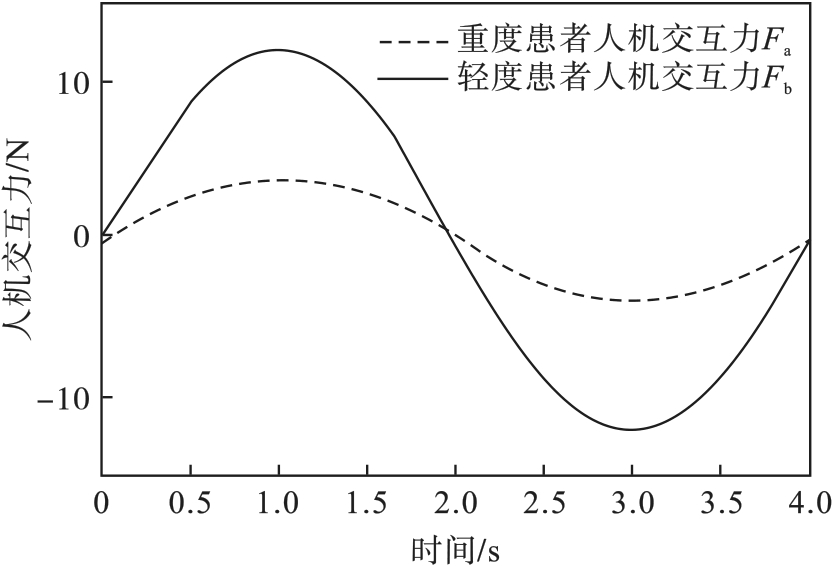
图14 人机交互力
Fig.14 Human?machine interaction force
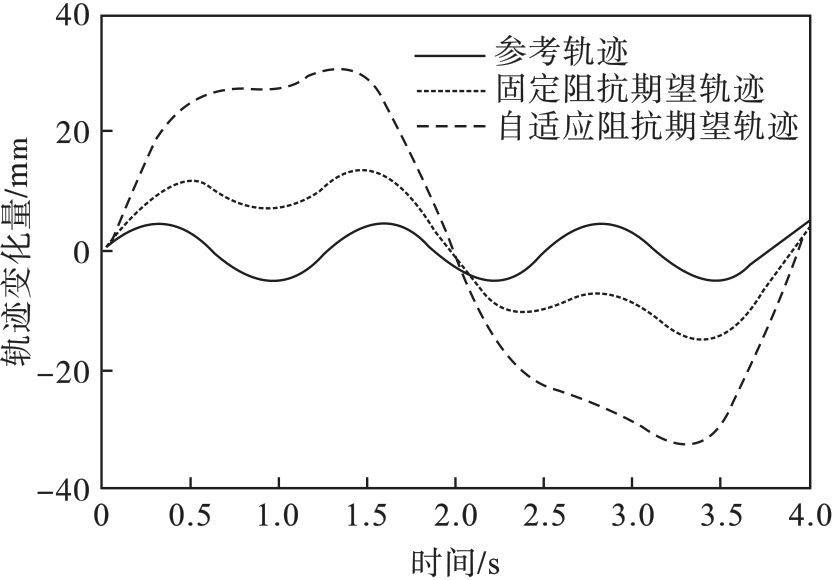
图15 A组阻抗轨迹跟踪对比
Fig.15 Comparison of impedance trajectory tracking of Group A

图16 A组阻抗参数对比(a)—阻尼系数B; (b)—刚度系数K.
Fig.16 Comparison of impedance parameters of Group A
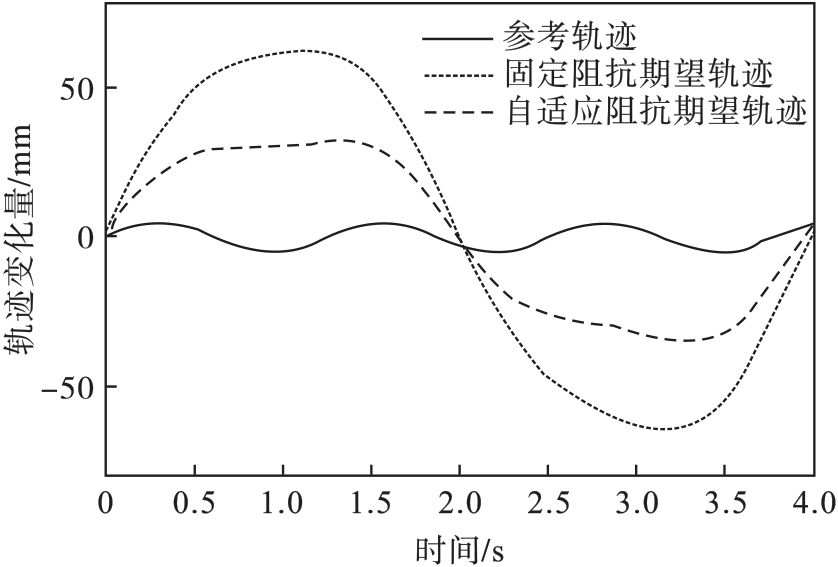
图17 B组阻抗轨迹跟踪对比
Fig.17 Comparison of impedance trajectory tracking of Group B
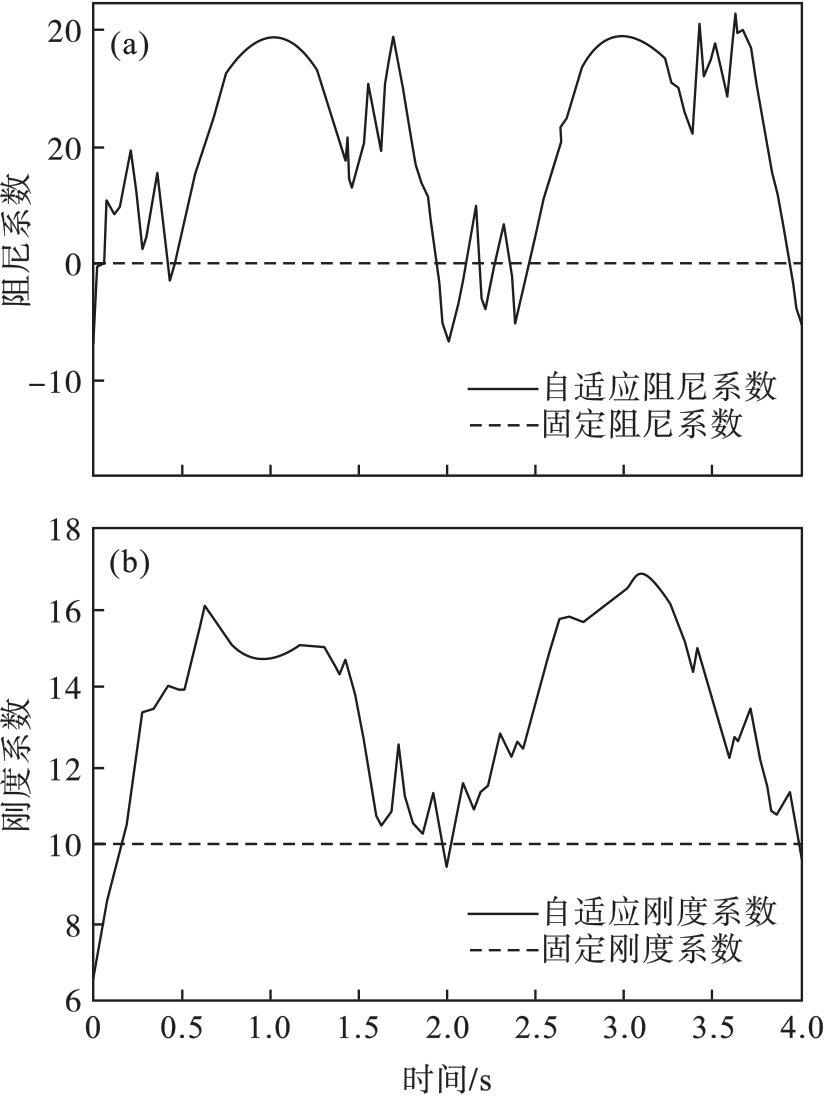
图18 B组阻抗参数对比(a)—阻尼系数B; (b)—刚度系数K.
Fig.18 Comparison of impedance parameters ofGroup B
| 1 | Zhang L G, Guo S, Sun Q.Development and assist‑as‑needed control of an end‑effector upper limb rehabilitation robot[J].Applied Sciences,2020,10(19):6684. |
| 2 | 苗青,孙晨阳,张明明,等.基于任务表现的机器人辅助康复自适应控制策略[J].机器人,2021,43(5):539-546. |
| Miao Qing, Sun Chen‑yang, Zhang Ming‑ming,et al. Adaptive control strategy for robot‑assisted rehabilitation based on task performance[J].Robotics,2021,43(5):539-546. | |
| 3 | Hogan N.Impedance control:an approach to manipulation[C]//American Control Conference.San Diego:IEEE,1984:304-313. |
| 4 | Akdoğan E, Aktan M E, Koru A T,et al.Hybrid impedance control of a robot manipulator for wrist and forearm rehabilitation:performance analysis and clinical results[J].Mechatronics,2018,49:77-91. |
| 5 | Jamwal P K, Hussain S, Ghayesh M H,et al.Impedance control of an intrinsically compliant parallel ankle rehabilitation robot[J].IEEE Transactions on Industrial Electronics,2016,63(6):3638-3647. |
| 6 | Khoshdel V, Akbarzadeh A, Naghavi N,et al.sEMG‑based impedance control for lower‑limb rehabilitation robot[J].Intelligent Service Robotics,2018,11:97-108. |
| 7 | Gray V, Rice C L, Garland S J.Factors that influence muscle weakness following stroke and their clinical implications:a critical review[J].Physiotherapy Canada,2012,64(4):415-426. |
| 8 | Andrews A W, Bohannon R W.Distribution of muscle strength impairments following stroke[J].Clinical Rehabilitation,2000,14(1):79-87. |
| 9 | 程晓芳.基于惯性传感器的可穿戴人机交互设备信息控制模型[J].计算机测量与控制,2019,27(6):70-74. |
| Cheng Xiao‑fang.Inertial sensor based information control model for wearable human‑computer interaction devices[J].Computer Measurement and Control,2019,27(6):70-74. | |
| 10 | Tran H T, Cheng H, Duong M K,et al.Fuzzy‑based impedance regulation for control of the coupled human‑exoskeleton system[C]//IEEE International Conference on Robotics and Biomimetics (ROBIO 2014).Bali,2014:986-992. |
| 11 | Sharma R, Gaur P, Bhatt S,et al.Optimal fuzzy logic‑based control strategy for lower limb rehabilitation exoskeleton[J].Applied Soft Computing,2021,105:107226. |
| 12 | Jiang D W, Shi G Q, Pang Z X,et al.Control of a new cycling rehabilitation robot based on fuzzy PID[J].Journal of Physics:Conference Series,2020,1622(1):012119. |
| 13 | Wang H B, Lu T T, Niu B S,et al.Research on fuzzy PID control algorithm for lower limb rehabilitation robot[C]//4th Information Technology and Mechatronics Engineering Conference.Chongqing,2018:956-960. |
| 14 | 卡潘德吉A.骨关节功能解剖学 [M].顾冬云,戴尅戎,译.北京:人民军医出版社,2011. |
| Kapandji A.Functional anatomy of bone and joint[M].Translated by Gu Dong‑yun,Dai Ke‑rong.Beijing:People’s Military Medical Press,2011. |
| [1] | 任朝晖, 刘玉麟, 姜泽宇, 陈翔宇. 基于模糊增益滑模四旋翼无人机自适应容错控制[J]. 东北大学学报(自然科学版), 2024, 45(2): 209-216. |
| [2] | 李杰, 贾长旺, 乔斌, 刘佳勇. 汽车转向非线性平衡点遗传算法求解及其改进[J]. 东北大学学报(自然科学版), 2023, 44(12): 1726-1733. |
| [3] | 丁山, 臧仕义, 曹殿明, 佘黎煌. 基于动态ID跳变的CAN总线安全调度算法[J]. 东北大学学报(自然科学版), 2022, 43(3): 350-358. |
| [4] | 叶翠丽, 王娜, 庞硕, 闫航. 基于改进遗传算法的秸秆还田机刀片功耗优化[J]. 东北大学学报(自然科学版), 2021, 42(9): 1290-1298. |
| [5] | 杨冬梅, 李达. 非线性广义Markov跳变系统的异步耗散控制[J]. 东北大学学报(自然科学版), 2021, 42(9): 1226-1230. |
| [6] | 丁山, 暴林慧, 高梦宁, 佘黎煌. 一种基于安全性的CAN-FD信号打包方法[J]. 东北大学学报(自然科学版), 2021, 42(6): 775-781. |
| [7] | 刘军, 杨青文, 王金涛, 刘华伟. 基于改进遗传算法的空间信息网恢复策略[J]. 东北大学学报(自然科学版), 2021, 42(4): 524-530. |
| [8] | 裴玉龙, 杨世军, 潘恒彦. 考虑车内拥挤状态的公交弹性发车间隔优化[J]. 东北大学学报(自然科学版), 2021, 42(11): 1663-1672. |
| [9] | 李壮年, 储满生, 柳政根, 李宝峰. 基于机器学习和遗传算法的高炉参数预测与优化[J]. 东北大学学报:自然科学版, 2020, 41(9): 1262-1267. |
| [10] | 黄川, 胡平, 连静. 一种基于车载信号还原机动车道3D地图的大数据方法[J]. 东北大学学报:自然科学版, 2020, 41(6): 771-777. |
| [11] | 刘芳, 刘欣怡, 苏卫星, 林辉. 电动汽车动力电池健康状态在线估算方法[J]. 东北大学学报:自然科学版, 2020, 41(4): 492-498. |
| [12] | 王新刚, 徐馷悉, 李尚杰, 马瑞敏. 不确定结构的区间可靠性优化设计[J]. 东北大学学报:自然科学版, 2020, 41(4): 521-527. |
| [13] | 张华伟, 郑晓涛. 基于遗传算法优化神经网络的拼焊板压边力预测[J]. 东北大学学报:自然科学版, 2020, 41(2): 241-245. |
| [14] | 刘芳, 马杰, 苏卫星, 何茂伟. 基于模型参数在线辨识技术的SOC估算方法[J]. 东北大学学报:自然科学版, 2020, 41(11): 1543-1549. |
| [15] | 茹敬雨, 贾子熙, 吴成东. 一种基于阳光的运动轨迹简化算法[J]. 东北大学学报:自然科学版, 2019, 40(8): 1070-1075. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||