东北大学学报(自然科学版) ›› 2025, Vol. 46 ›› Issue (6): 86-92.DOI: 10.12068/j.issn.1005-3026.2025.20230343
李小彭1, 李泉1, 上官朝伟1, 尹猛2
Xiao-peng LI1, Quan LI1, Chao-wei SHANGGUAN1, Meng YIN2
摘要:
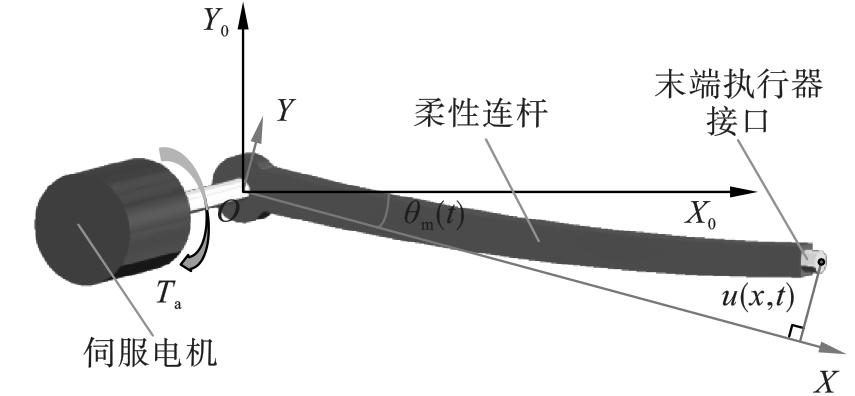
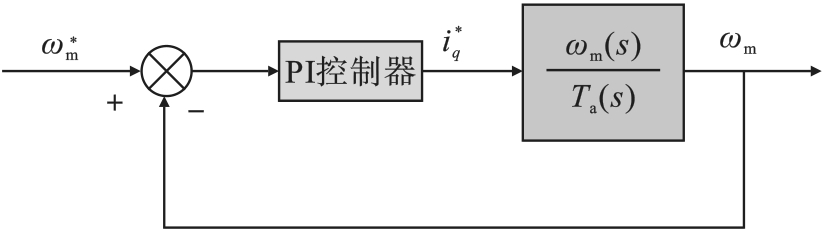
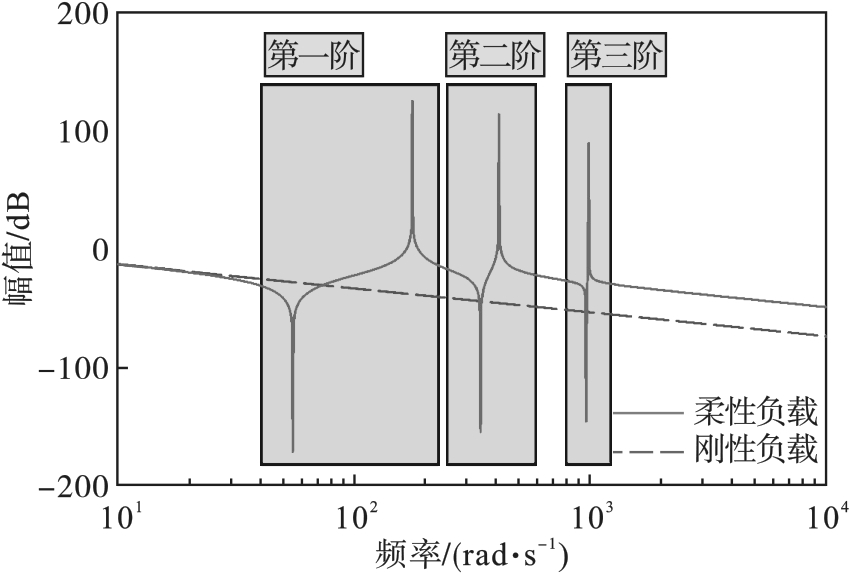
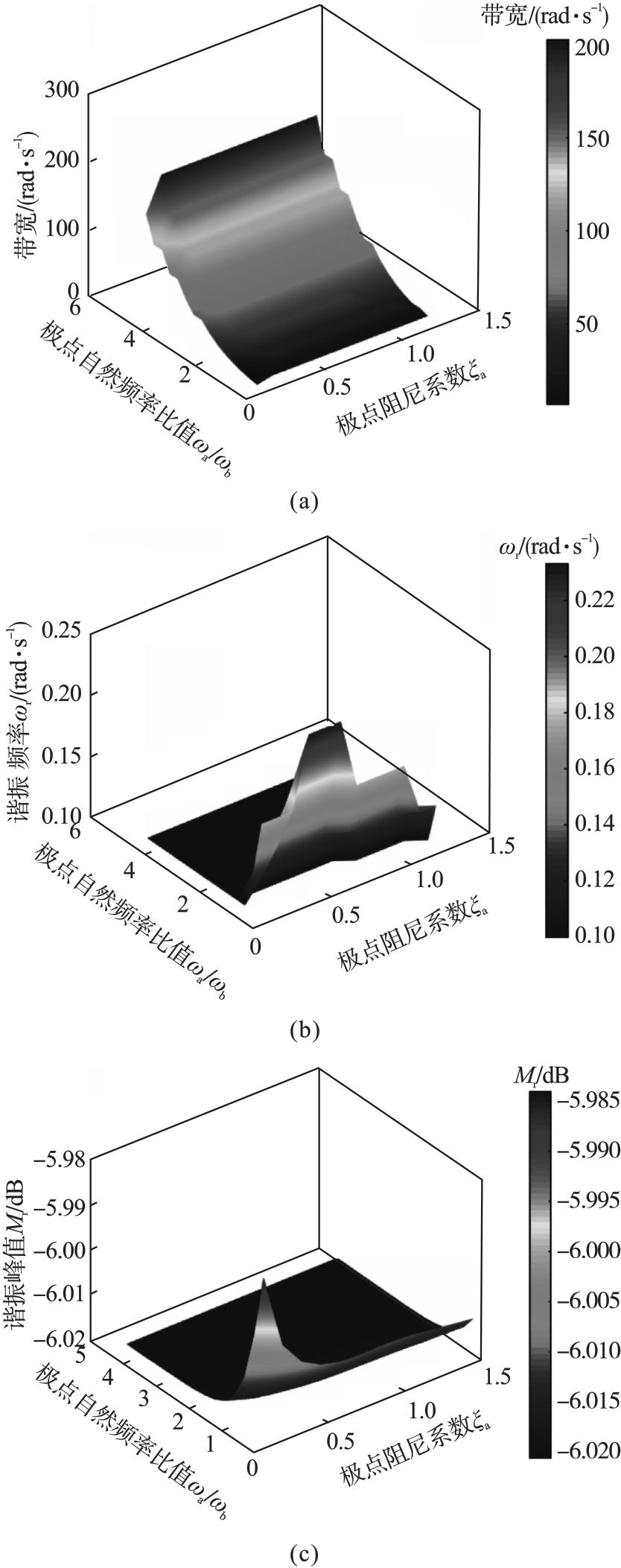
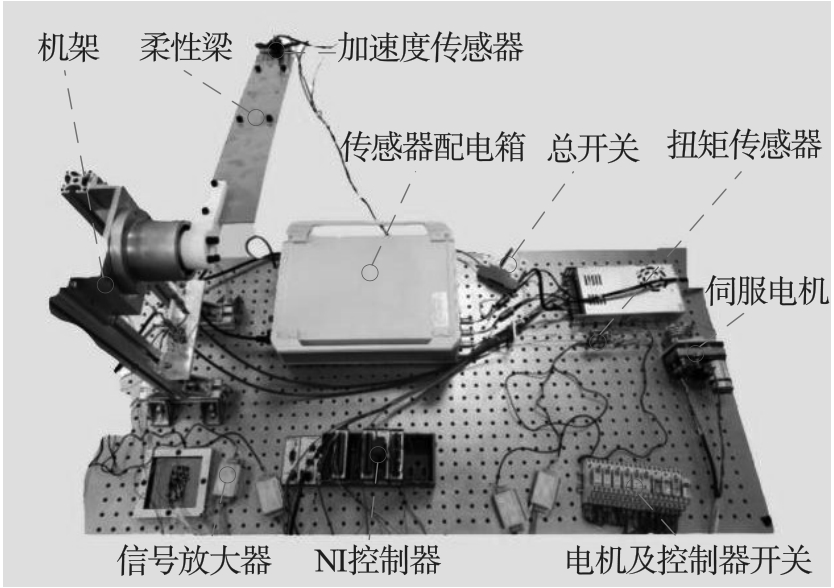
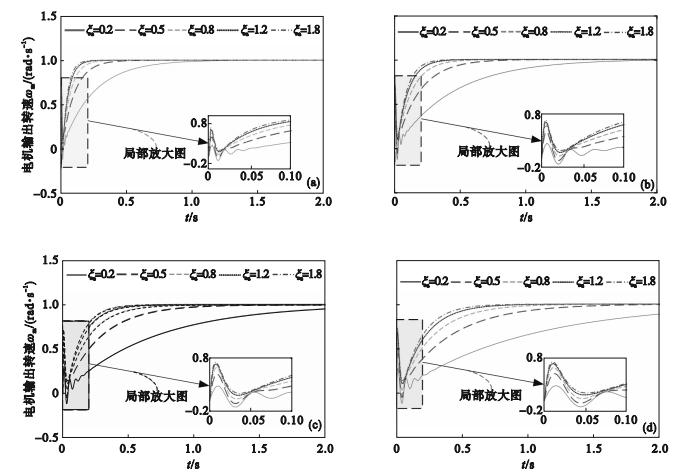
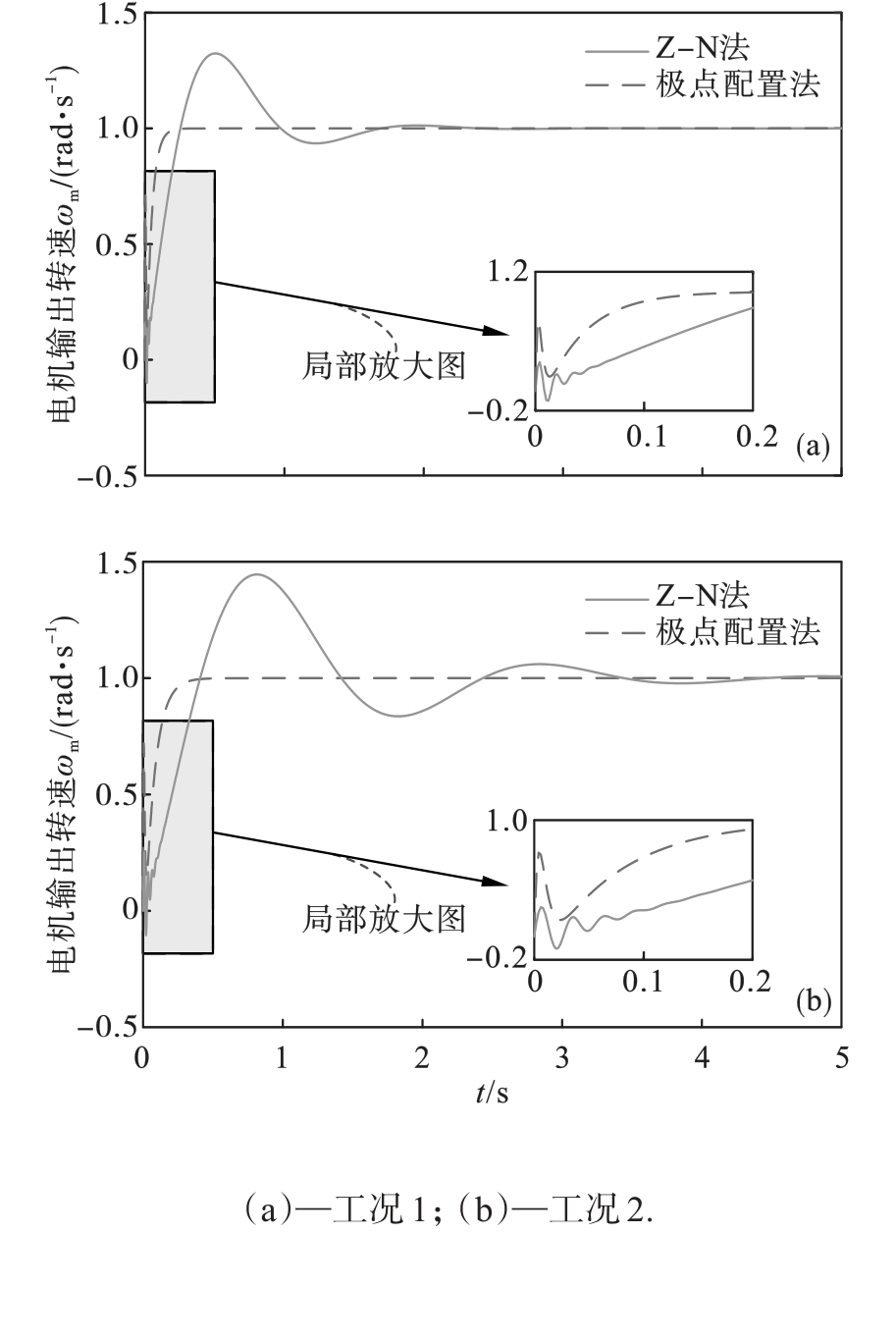
为抑制柔性机械臂运动时伺服驱动系统可能产生的谐振,降低电机输出端的速度波动,提出了一种采用极点配置法设计比例-积分(PI)调节器的方法.依据假设模态法及拉格朗日动力学方程建立了伺服电机驱动柔性机械臂的动力学模型,利用其状态方程得到系统的传递函数,并分析了伺服驱动系统的传递特性.利用相同实部的极点配置法设计PI调节器参数,讨论极点自然频率比值、阻尼系数对系统评价指标的影响.最后进行了仿真实验,结果表明阻尼系数的适当增大有利于系统的稳定,但柔性负载的长度及转动惯量不宜过大;并与传统的Ziegler-Nichols法对比,证明了此方法的有效性.
中图分类号: