Journal of Northeastern University(Natural Science) ›› 2025, Vol. 46 ›› Issue (2): 64-75.DOI: 10.12068/j.issn.1005-3026.2025.20230232
• Mechanical Engineering • Previous Articles Next Articles
Quan SHAN, Jian-cong HUANG( ), Shun ZHANG, Yan CHEN
), Shun ZHANG, Yan CHEN
Received:2023-08-06
Online:2025-02-15
Published:2025-05-20
Contact:
Jian-cong HUANG
CLC Number:
Quan SHAN, Jian-cong HUANG, Shun ZHANG, Yan CHEN. Configuration Synthesis Method of Elbow & Wrist 4-DOF Redundant Rehabilitation Exoskeleton[J]. Journal of Northeastern University(Natural Science), 2025, 46(2): 64-75.
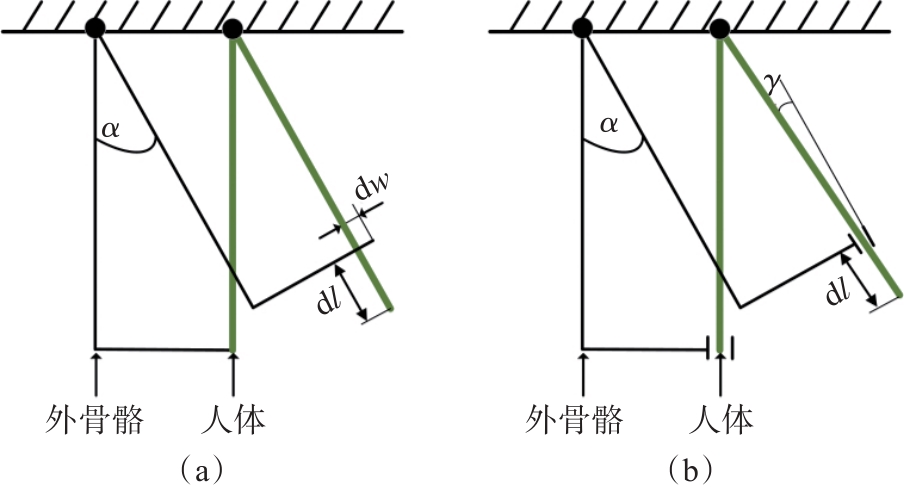
Fig. 1 Schematic of 1-DOF human limbs and exoskeleton
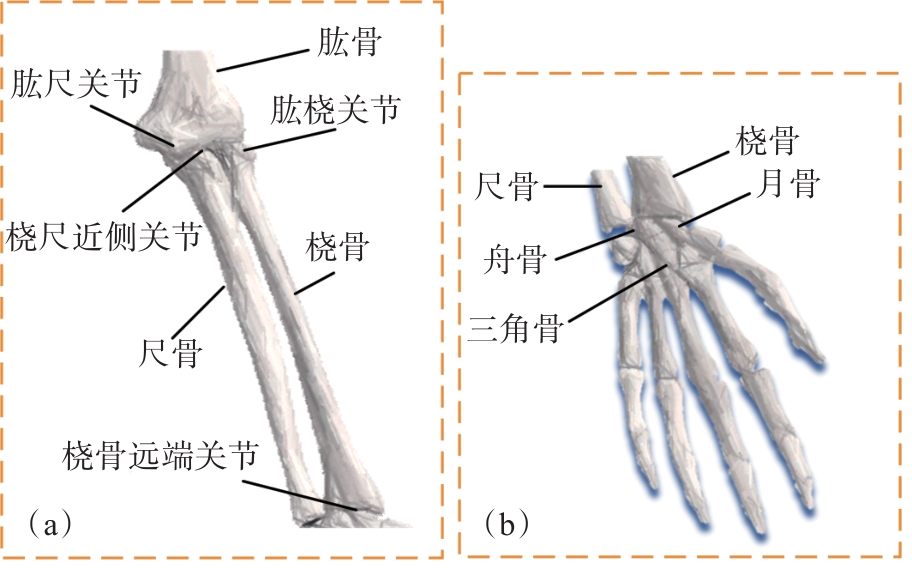
Fig. 2 Anatomical diagram of the elbow and wrist joints
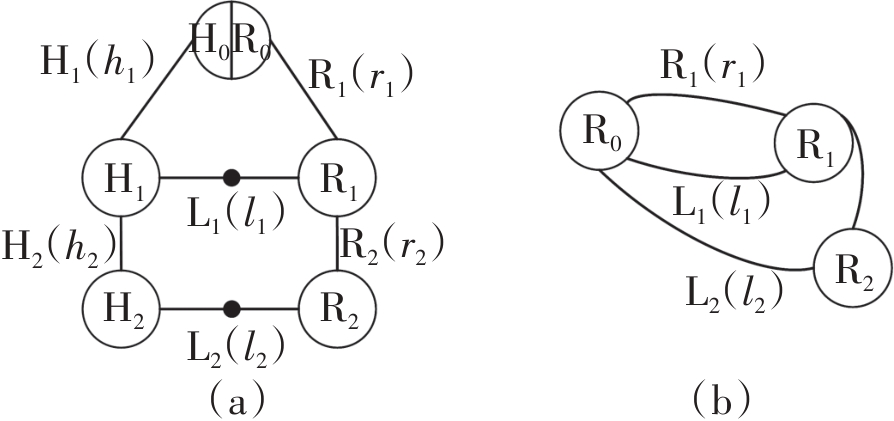
Fig. 3 Schematic diagram of the closed loop of motion
| 运动链 | 主动转动运动副数目 | 冗余运动副数目 | 种类合成 |
|---|---|---|---|
| L1 | 2 | 4 | |
| L2 | 2 | 4 |
Table 1 Synthesis of redundant motion pair types for elbows and wrists l1=4,l2=4
| 运动链 | 主动转动运动副数目 | 冗余运动副数目 | 种类合成 |
|---|---|---|---|
| L1 | 2 | 4 | |
| L2 | 2 | 4 |
| 运动链 | 主动转动运动副数目 | 冗余运动副数目 | 种类合成 |
|---|---|---|---|
| L1 | 2 | 5 | |
| L2 | 2 | 3 |
Table 2 Synthesis of redundant motion pair types for elbows and wrists l1=5,l2=3
| 运动链 | 主动转动运动副数目 | 冗余运动副数目 | 种类合成 |
|---|---|---|---|
| L1 | 2 | 5 | |
| L2 | 2 | 3 |
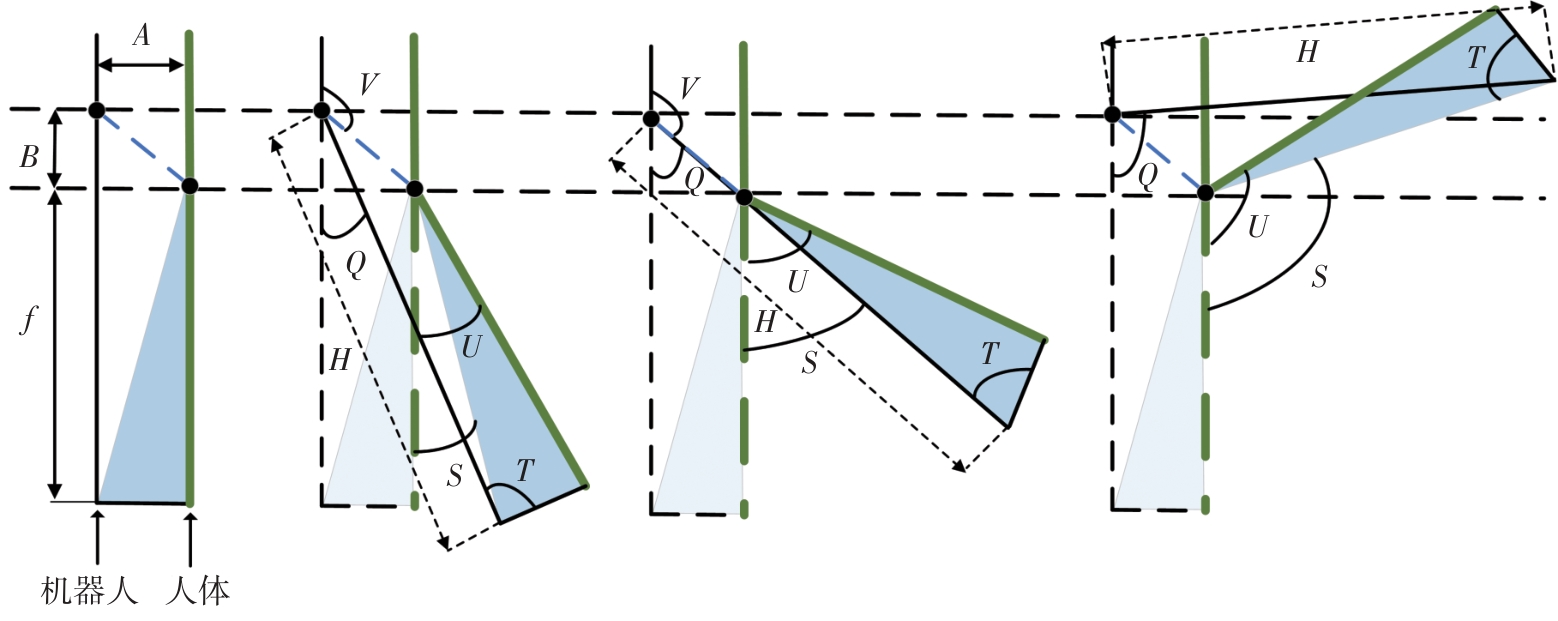
Fig. 4 Schematic diagram of the motion process
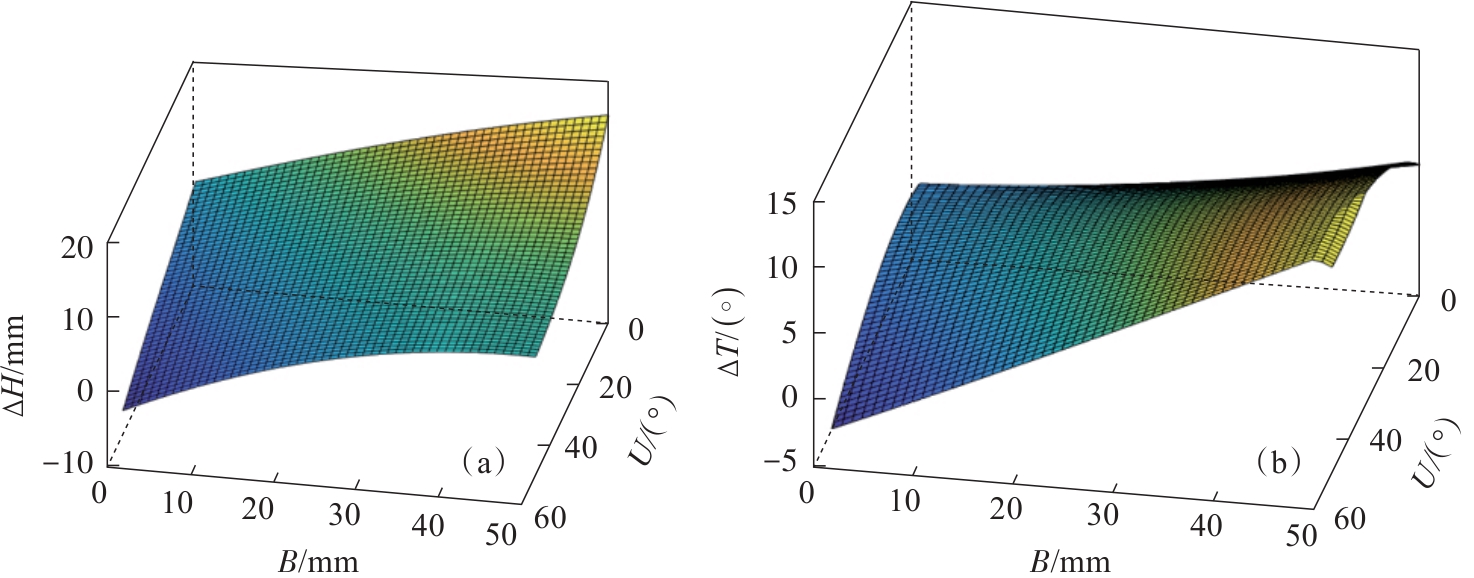
Fig. 5 Variation of ∆H and ∆T when the exoskeleton axis meets the parallelism requirement with the body axis
| 运动链 | 主动转动运动副数目 | 确定冗余运动副 | 未确定冗余运动副 | 种类 合成 |
|---|---|---|---|---|
| L1 | 2 | 1P1R | 2 | |
| L2 | 2 | 1P1R | 2 |
Table 3 Synthesis of redundant motion pair types for elbows and wrists l1=4,l2=4
| 运动链 | 主动转动运动副数目 | 确定冗余运动副 | 未确定冗余运动副 | 种类 合成 |
|---|---|---|---|---|
| L1 | 2 | 1P1R | 2 | |
| L2 | 2 | 1P1R | 2 |
| 运动链 | 主动运动副数目 | 确定冗余运动副 | 未确定冗余运动副 | 种类合成 |
|---|---|---|---|---|
| L1 | 2 | 1P1R | 3 | 2 |
| L2 | 2 | 1P1R | 1 |
Table 4 Synthesis of redundant motion pair types for elbows and wrists l1=5,l2=3
| 运动链 | 主动运动副数目 | 确定冗余运动副 | 未确定冗余运动副 | 种类合成 |
|---|---|---|---|---|
| L1 | 2 | 1P1R | 3 | 2 |
| L2 | 2 | 1P1R | 1 |
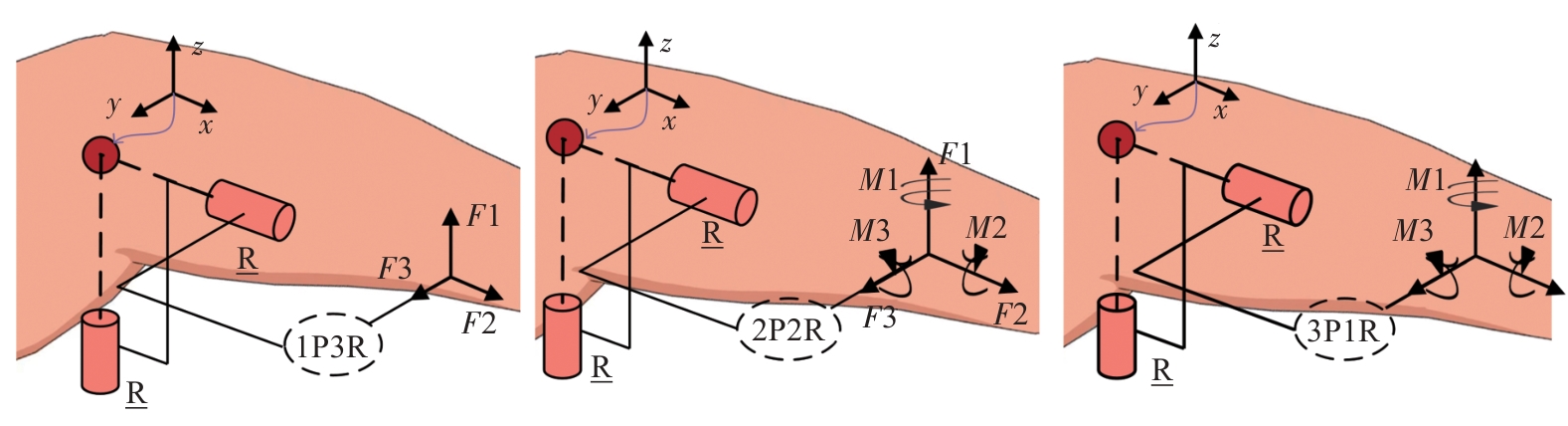
Fig. 6 Force and moment analysis at the elbow joint whenl1=4,l2=4

Fig. 7 Force and moment analysis at the wrist joint when l1=4,l2=4
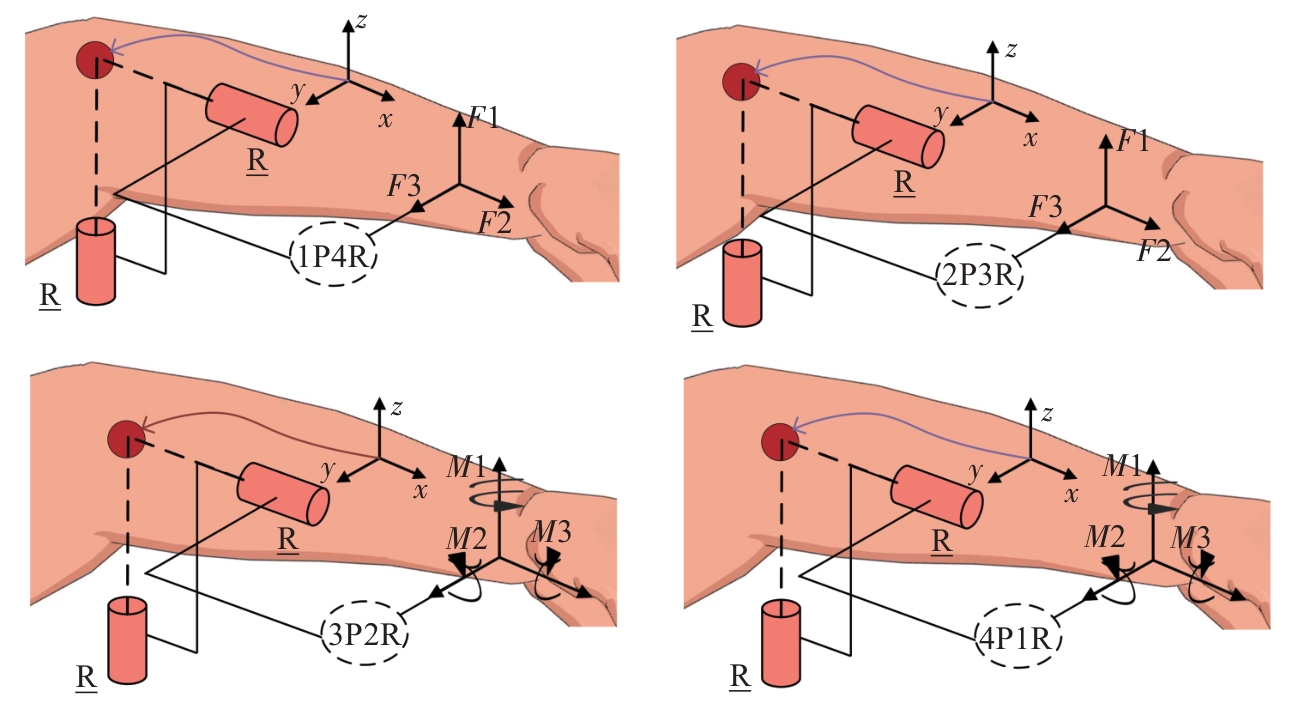
Fig. 8 Force and moment analysis at the elbow joint when l1=5,l2=3

Fig. 9 Force and moment analysis of the wrist joint when l1=5,l2=3
| 种类合成子链 | 轴线合成 | 传递力和 力矩的方向 |
|---|---|---|
| 1P3R | ||
| 2P2R | ||
| 3P1R |
Table 5 Force and torque conditions for elbows and wrists l1=4,l2=4
| 种类合成子链 | 轴线合成 | 传递力和 力矩的方向 |
|---|---|---|
| 1P3R | ||
| 2P2R | ||
| 3P1R |
| 种类合成子链 | 轴线合成 | 传递力和 力矩的方向 |
|---|---|---|
| 4P1R | ||
| 3P2R | ||
| 2P3R | ||
| 1P4R | ||
Table 6 Force and torque conditions for elbows
| 种类合成子链 | 轴线合成 | 传递力和 力矩的方向 |
|---|---|---|
| 4P1R | ||
| 3P2R | ||
| 2P3R | ||
| 1P4R | ||
| 种类合成子链 | 轴线合成 | 传递力和 力矩的方向 |
|---|---|---|
| 2P1R | ||
| 1P2R | ||
Table 7 Force and torque conditions for wrists
| 种类合成子链 | 轴线合成 | 传递力和 力矩的方向 |
|---|---|---|
| 2P1R | ||
| 1P2R | ||
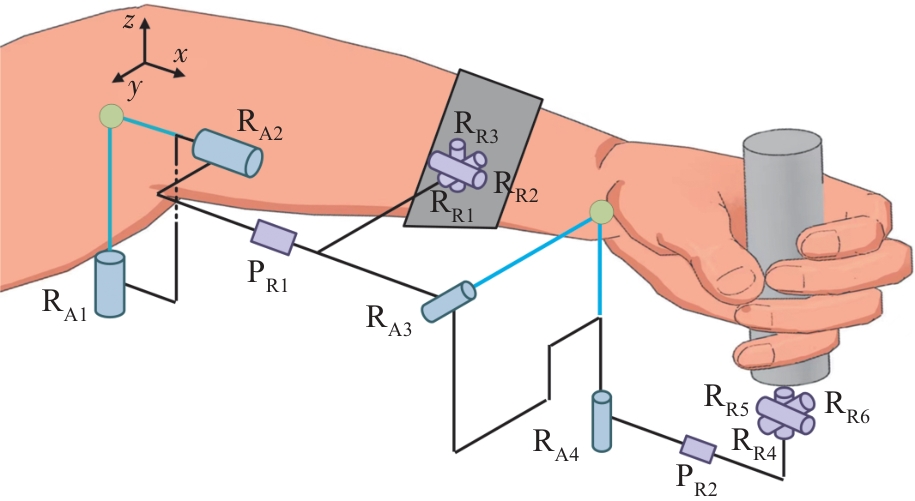
Fig. 10 Mechanism sketch
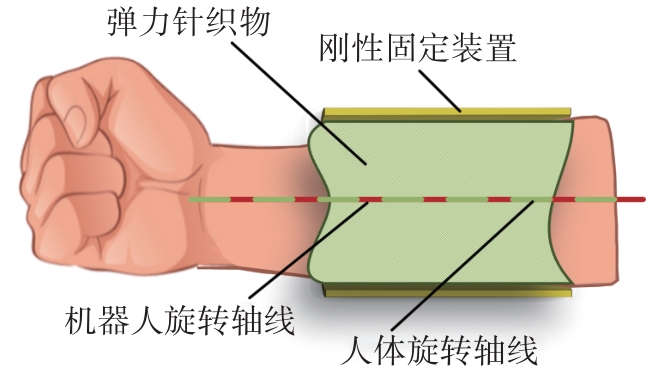
Fig. 11 Enlarged human-machine interface
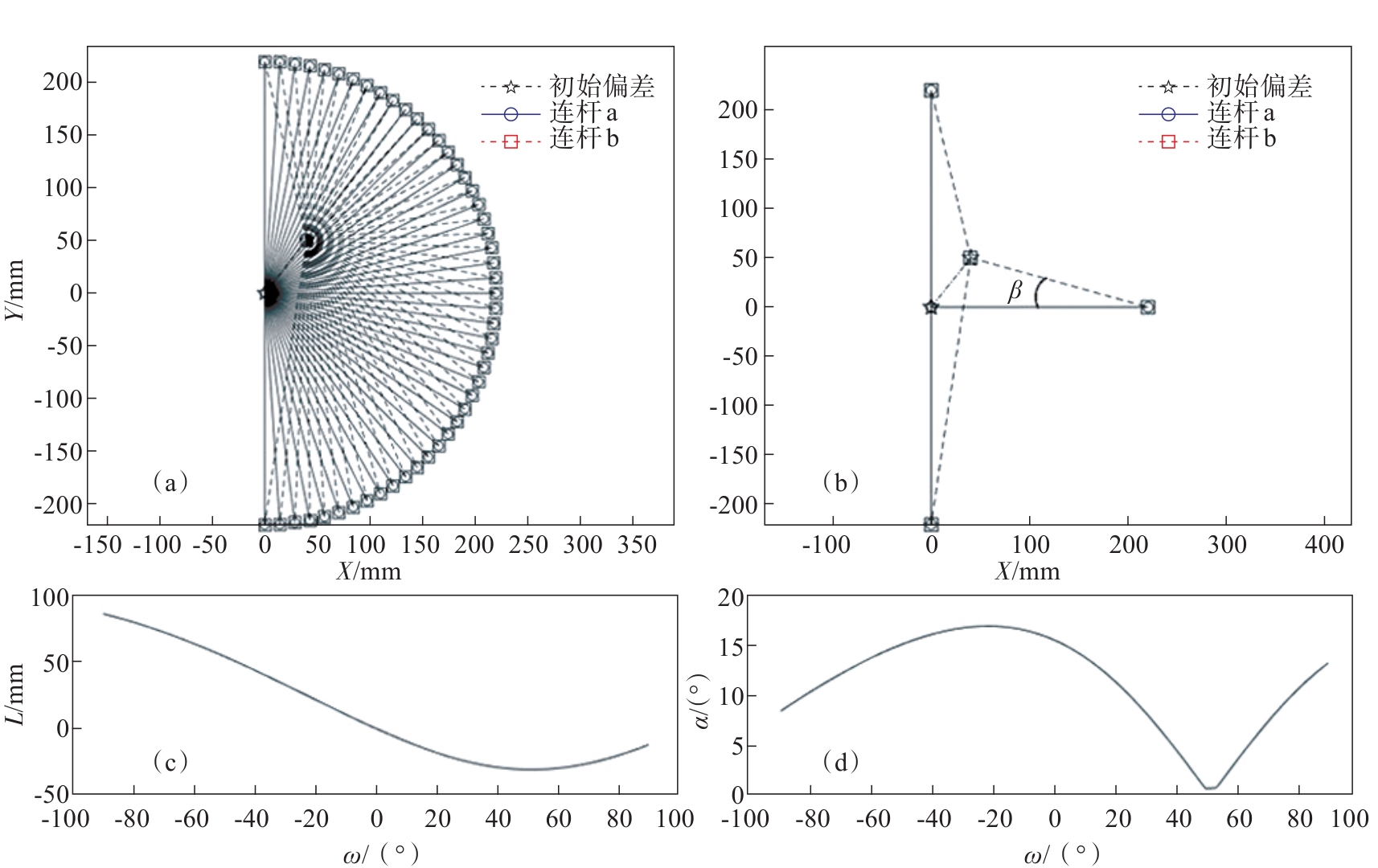
Fig. 12 Motion process of the exoskeleton and the human body when the coordinates of the starting point of the connecting rod b are (40,50,0)
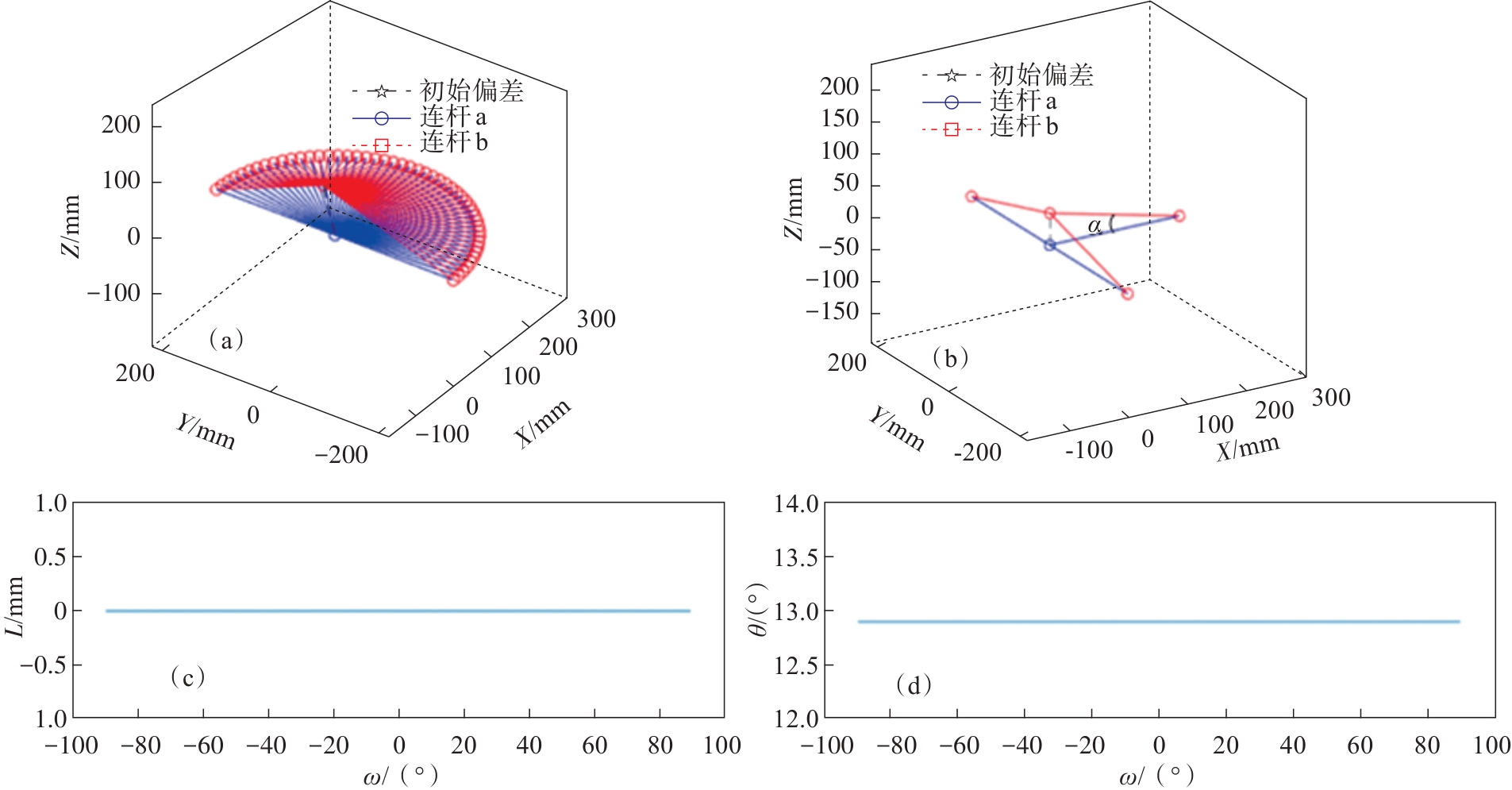
Fig. 13 Motion process of the exoskeleton and the human body when the coordinates of the starting point of the connecting rod b are (0,0,50)
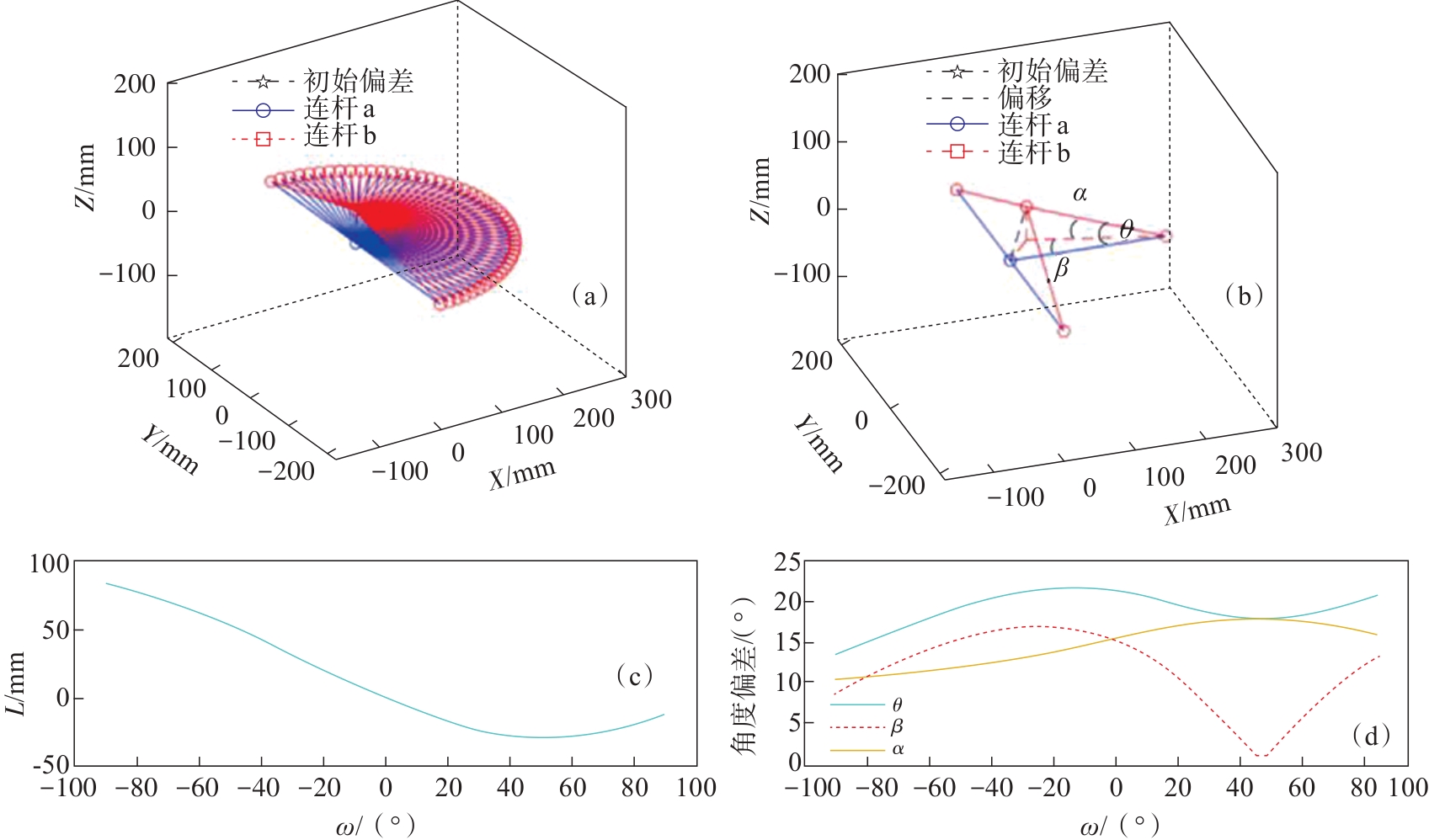
Fig. 14 Motion process of the exoskeleton and the human body when the coordinates of the starting point of the connecting rod b are (40,50,50)
| 1 | Hwang S H, Sun D I, Han J, et al. Gait pattern generation algorithm for lower-extremity rehabilitation–exoskeleton robot considering wearer’s condition[J]. Intelligent Service Robotics, 2021, 14(3): 345-355. |
| 2 | Valdez S I, Gutierrez-Carmona I, Keshtkar S, et al. Kinematic and dynamic design and optimization of a parallel rehabilitation robot[J]. Intelligent Service Robotics, 2020, 13(3): 365-378. |
| 3 | Xu P P, Xia D, Li J C, et al. Execution and perception of upper limb exoskeleton for stroke patients: a systematic review[J]. Intelligent Service Robotics, 2022, 15(4): 557-578. |
| 4 | Shi D, Zhang W X, Zhang W, et al. A review on lower limb rehabilitation exoskeleton robots[J]. Chinese Journal of Mechanical Engineering, 2019, 32(1): 74-84. |
| 5 | Hu M W, Wang H G, Pan X N. Optimal configuration selection for stiffness identification of 7-DOF collaborative robots[J]. Intelligent Service Robotics, 2020, 13(3): 379-391. |
| 6 | Ruiz-Olaya A F, Lopez-Delis A, da Rocha A F. Upper and lower extremity exoskeletons[M]//Handbook of Biomechatronics. Amsterdam: Elsevier, 2019: 283-317. |
| 7 | Louie D R, Eng J J. Powered robotic exoskeletons in post-stroke rehabilitation of gait: a scoping review[J]. Journal of Neuroengineering and Rehabilitation, 2016, 13(1): 53-57. |
| 8 | Wang X, Song Q Z, Wang X G, et al. Kinematics and dynamics analysis of a 3-DOF upper-limb exoskeleton with an internally rotated elbow joint[J]. Applied Sciences, 2018, 8(3): 464. |
| 9 | Esmaeili M, Jarrassé N, Dailey W, et al. Hyperstaticity for ergonomie design of a wrist exoskeleton[C]// IEEE 13th International Conference on Rehabilitation Robotics (ICORR). Seattle, WA:IEEE, 2013: 1-6. |
| 10 | Schiele A. An explicit model to predict and interpret constraint force creation in pHRI with exoskeletons[C]//2008 IEEE International Conference on Robotics and Automation. Pasadena:IEEE, 2008: 1324-1330. |
| 11 | Yan H, Wang H B, Chen P, et al. Configuration design of an upper limb rehabilitation robot with a generalized shoulder joint[J]. Applied Sciences, 2021, 11(5): 2080. |
| 12 | Jarrasse N, Morel G. Connecting a human limb to an exoskeleton[J]. IEEE Transactions on Robotics, 2011, 28(3): 697-709. |
| 13 | Fang Y F, Tsai L W. Enumeration of a class of overconstrained mechanisms using the theory of reciprocal screws[J]. Mechanism and Machine Theory, 2004, 39(11): 1175-1187. |
| 14 | Perry J C, Rosen J, Burns S. Upper-limb powered exoskeleton design[J]. IEEE/ASME Transactions on Mechatronics, 2007, 12(4): 408-417. |
| 15 | Schiele A, van der Helm F C T. Kinematic design to improve ergonomics in human machine interaction[J]. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2006, 14(4): 456-469. |
| 16 | Schiele A, van der Helm F C T. Influence of attachment pressure and kinematic configuration on pHRI with wearable robots[J]. Applied Bionics and Biomechanics, 2009, 6(2): 157-173. |
| 17 | Jamwal P K, Hussain S, Ghayesh M H, et al. Impedance control of an intrinsically compliant parallel ankle rehabilitation robot[J]. IEEE Transactions on Industrial Electronics, 2016, 63(6): 3638-3647. |
| 18 | Näf M B, Junius K, Rossini M, et al. Misalignment compensation for full human-exoskeleton kinematic compatibility: state of the art and evaluation[J]. Applied Mechanics Reviews, 2018, 70(5): 050802. |
| 19 | 李剑锋, 黄相强, 陶春静, 等. 膝关节康复外骨骼构型综合与结构设计[J].哈尔滨工程大学学报, 2017, 38(4): 625-632. |
| Li Jian-feng, Huang Xiang-qiang, Tao Chun-jing, et al. Configuration synthesis and structure design of knee rehabilitation exoskeleton[J]. Journal of Harbin Engineering University, 2017, 38(4): 625-632. | |
| 20 | Chao E Y, An K N, Askew L J, et al. Electrogoniometer for the measurement of human elbow joint rotation[J].Journal of Biomechanical Engineering, 1980, 102(4): 301-310. |
| [1] | Hong-li XU, Ben-qing JIA, Kuo LUAN. Multi-UUV Formation Obstacle Avoidance Method Based on Improved Artificial Potential Field [J]. Journal of Northeastern University(Natural Science), 2024, 45(11): 1547-1556. |
| [2] | Xiao-ming CHEN, Da-chuan CHEN, Yu-qian ZHAO, Cheng LI. Cable-Driven Flexoskeleton Bionic Crab Robots for Beach Environmental Monitoring [J]. Journal of Northeastern University(Natural Science), 2024, 45(10): 1443-1451. |
| [3] | Quan SHAN, Shun ZHANG, Jian-cong HUANG, Yan CHEN. Research on Fuzzy Adaptive Interactive Control of Upper Limb Rehabilitation Robots [J]. Journal of Northeastern University(Natural Science), 2024, 45(7): 974-983. |
| [4] | Hao WU, Zhong-chao LIANG, Wen-cheng WANG, Yong-fu WANG. Trajectory Tracking Control Method of Wheeled Mobile Robot with Uncertain Slippage [J]. Journal of Northeastern University(Natural Science), 2024, 45(6): 858-865. |
| [5] | Zhi-guo LU, Xiao WANG. Mechanical Arm Trajectory Planning Based on B-Spline and Whale Optimization Algorithm [J]. Journal of Northeastern University(Natural Science), 2024, 45(5): 683-689. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||