Journal of Northeastern University(Natural Science) ›› 2025, Vol. 46 ›› Issue (6): 93-101.DOI: 10.12068/j.issn.1005-3026.2025.20239074
• Mechanical Engineering • Previous Articles Next Articles
Hai-bin WU1,2, Wu-kai HUANG1
Received:2023-12-21
Online:2025-06-15
Published:2025-09-02
CLC Number:
Hai-bin WU, Wu-kai HUANG. Feature Extraction and Motion Tracking of Planar Fillet Weld Seams Based on 3D Point Cloud[J]. Journal of Northeastern University(Natural Science), 2025, 46(6): 93-101.
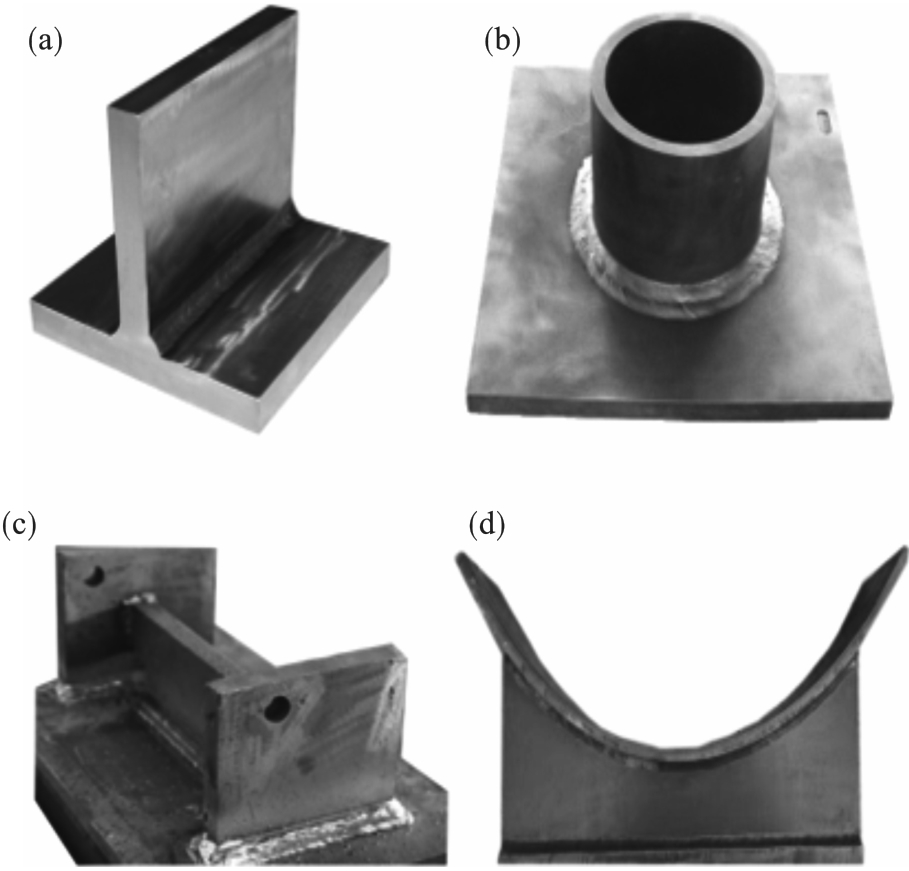
Fig.1 Typical workpieces for planar fillet weld seams
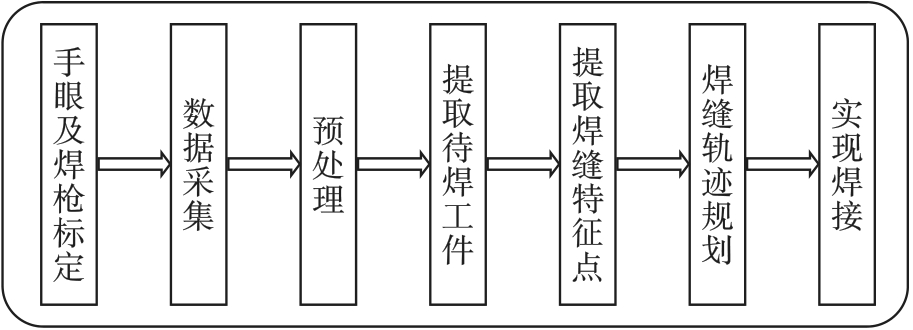
Fig.2 Overall scheme for the fillet weld seam extraction system
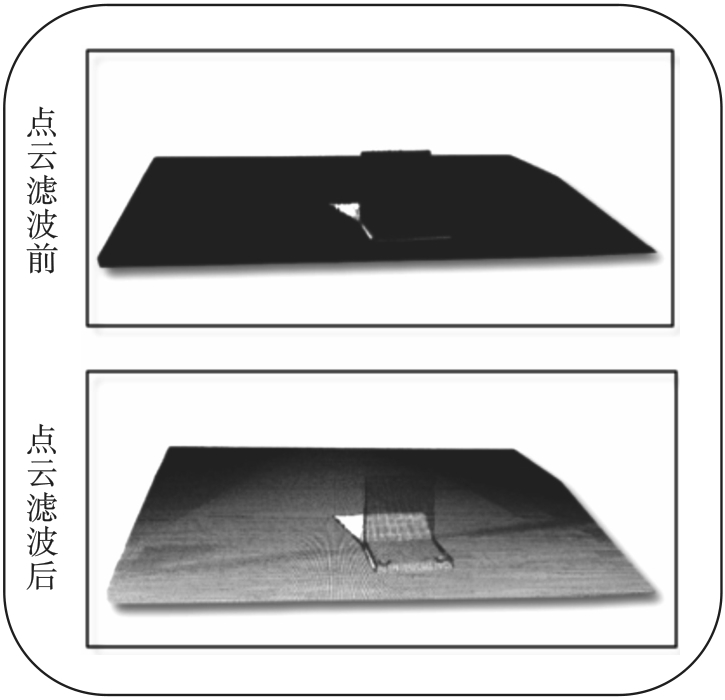
Fig.3 Effect of point cloud filtering algorithm
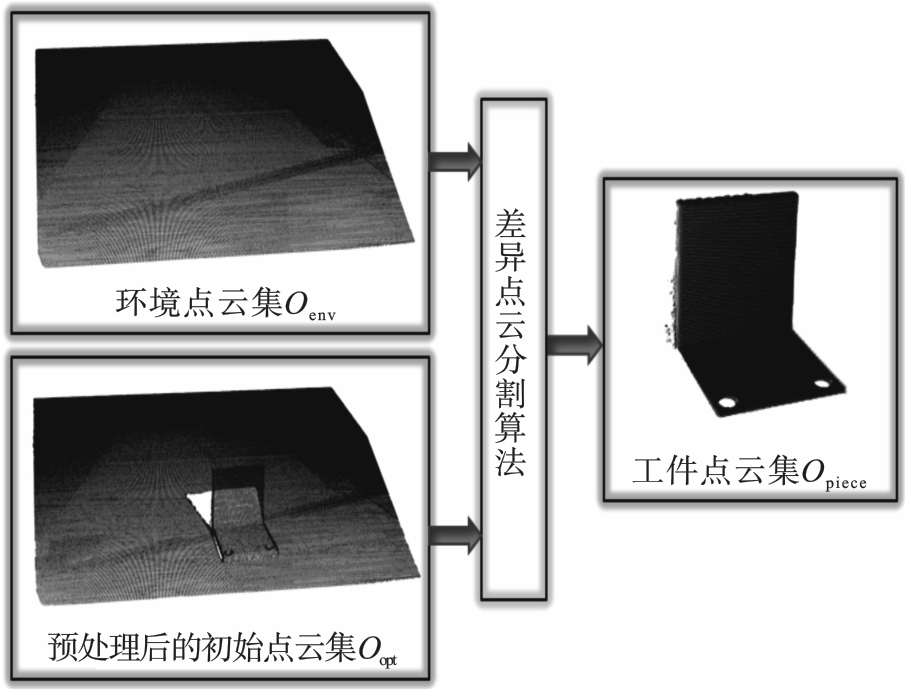
Fig.4 Effect of differential point cloud segmentation algorithm
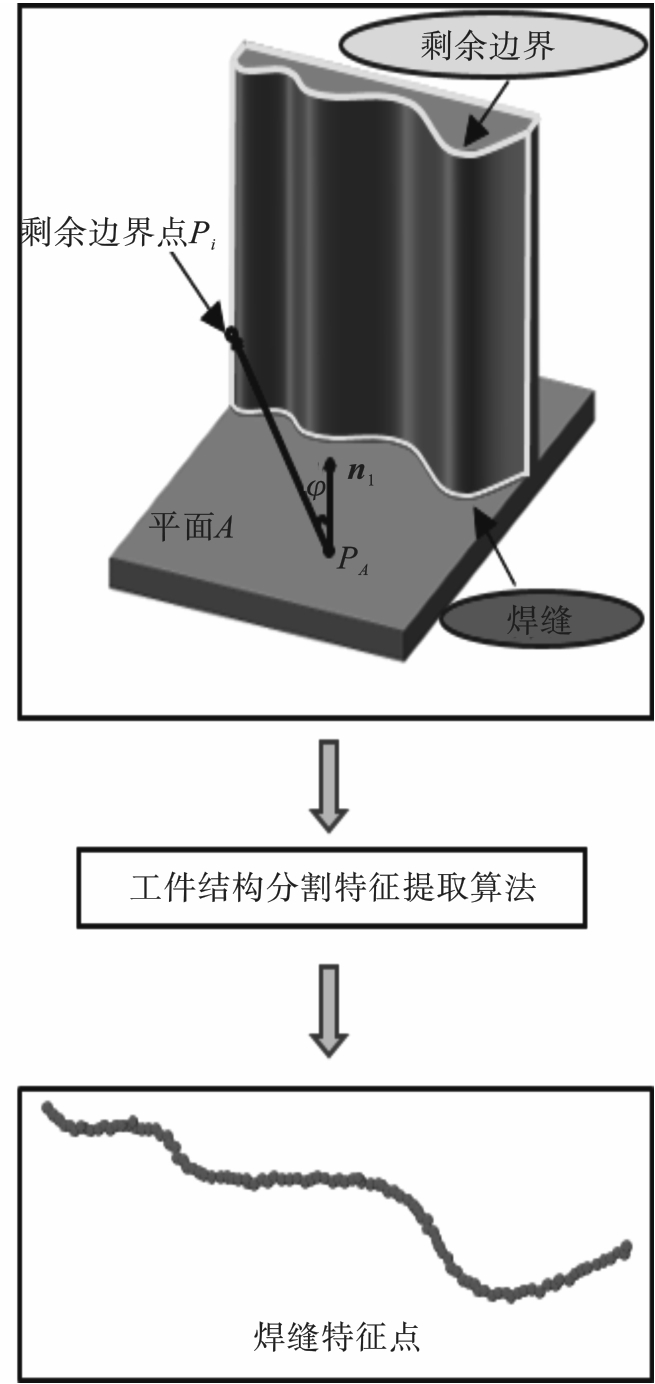
Fig.5 Schematic diagram of plane curve fillet weld seam extraction
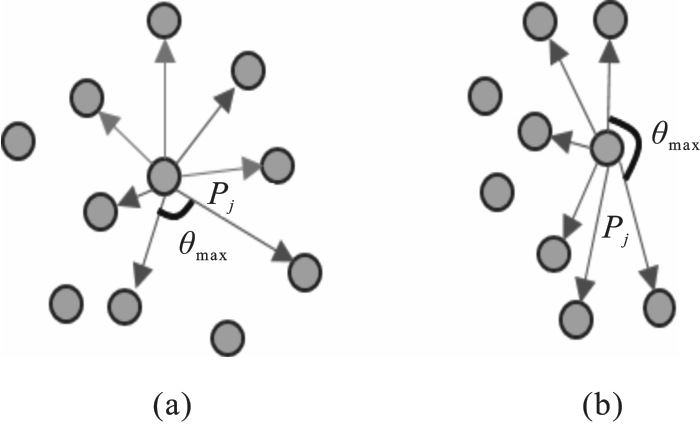
Fig.6 Schematic diagram of the edge detection algorithm
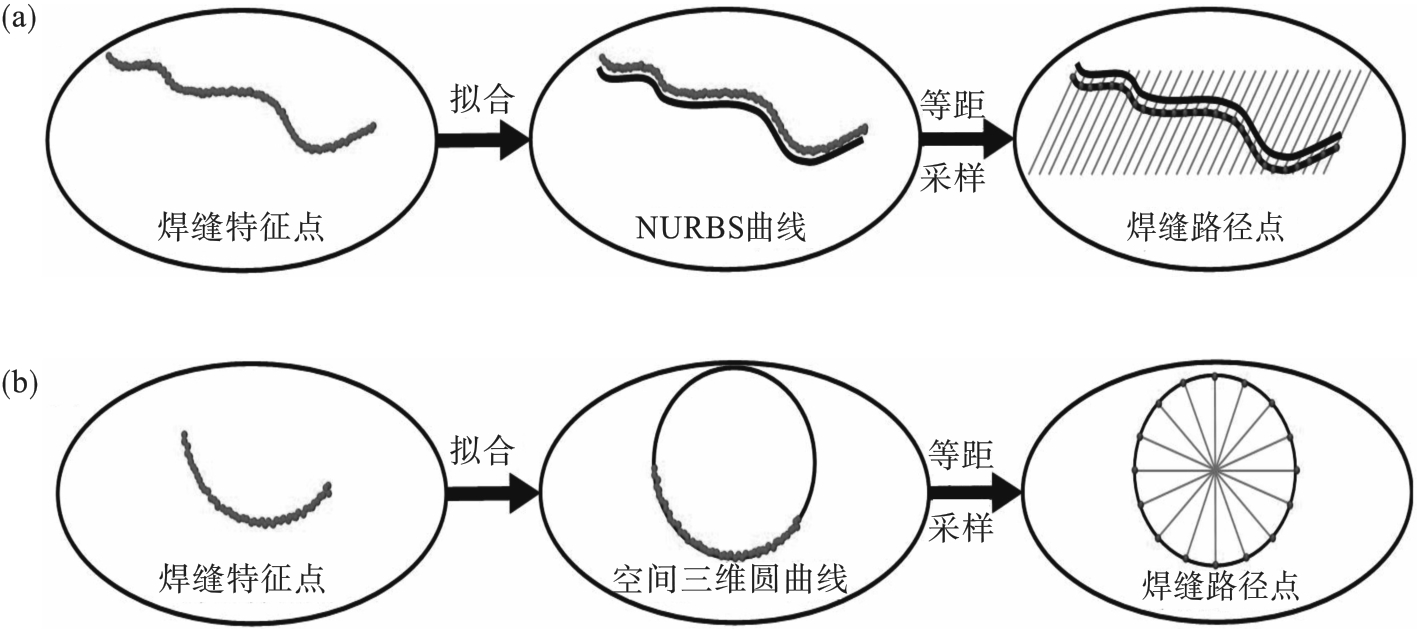
Fig.7 Weld path point extraction
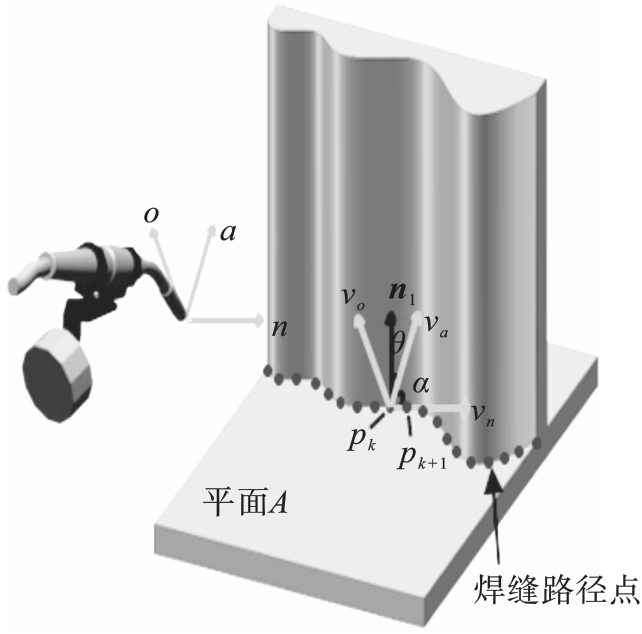
Fig.8 Position estimation diagram

Fig.9 Experimental platform for fillet weld seam extraction
误差类型 | 本文算法 | 传统算法 |
|---|---|---|
X轴最大误差 | 0.514 | 0.718 |
Y轴最大误差 | 0.476 | 0.606 |
Z轴最大误差 | 0.458 | 0.801 |
X轴平均误差 | 0.233 | 0.237 |
Y轴平均误差 | 0.088 | 0.219 |
Z轴平均误差 | 0.080 | 0.120 |
平均距离偏差 | 0.287 | 0.388 |
Table 1 Measurement error of simple straight line weld seam under different pre-processing algorithms mm
误差类型 | 本文算法 | 传统算法 |
|---|---|---|
X轴最大误差 | 0.514 | 0.718 |
Y轴最大误差 | 0.476 | 0.606 |
Z轴最大误差 | 0.458 | 0.801 |
X轴平均误差 | 0.233 | 0.237 |
Y轴平均误差 | 0.088 | 0.219 |
Z轴平均误差 | 0.080 | 0.120 |
平均距离偏差 | 0.287 | 0.388 |
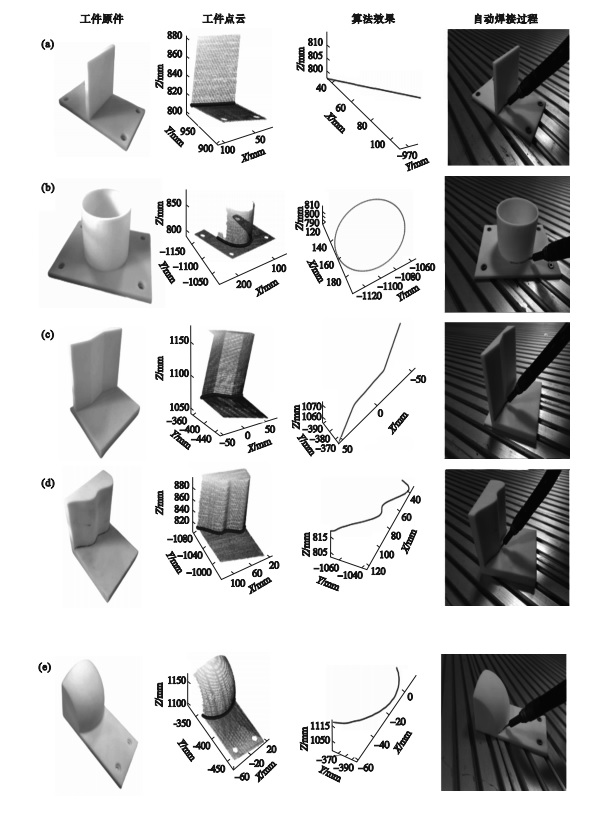
Fig.10 Experimental effect of various workpieces
| 焊缝类型 | ME/mm | RMSE/mm | ||||
|---|---|---|---|---|---|---|
| X轴 | Y轴 | Z轴 | X轴 | Y轴 | Z轴 | |
| 简单直线 | 0.514 | 0.476 | 0.458 | 0.275 | 0.113 | 0.101 |
| 平面圆柱 | 0.944 | 0.570 | 0.653 | 0.323 | 0.189 | 0.198 |
| 平面折线 | 0.927 | 0.893 | 0.869 | 0.326 | 0.570 | 0.407 |
| 平面曲线 | 0.886 | 0.823 | 0.815 | 0.314 | 0.558 | 0.396 |
| 平面曲面 | 0.876 | 0.802 | 0.811 | 0.325 | 0.512 | 0.384 |
Table 2 Measurement errors for different fillet welds
| 焊缝类型 | ME/mm | RMSE/mm | ||||
|---|---|---|---|---|---|---|
| X轴 | Y轴 | Z轴 | X轴 | Y轴 | Z轴 | |
| 简单直线 | 0.514 | 0.476 | 0.458 | 0.275 | 0.113 | 0.101 |
| 平面圆柱 | 0.944 | 0.570 | 0.653 | 0.323 | 0.189 | 0.198 |
| 平面折线 | 0.927 | 0.893 | 0.869 | 0.326 | 0.570 | 0.407 |
| 平面曲线 | 0.886 | 0.823 | 0.815 | 0.314 | 0.558 | 0.396 |
| 平面曲面 | 0.876 | 0.802 | 0.811 | 0.325 | 0.512 | 0.384 |
| 步骤名称 | 运行时间/s |
|---|---|
| 预处理 | 7.015 |
| 工件提取 | 8.359 |
Table 3 Running time of pre-processing and artifact
| 步骤名称 | 运行时间/s |
|---|---|
| 预处理 | 7.015 |
| 工件提取 | 8.359 |
| 焊缝类型 | 运行时间/s |
|---|---|
| 简单直线 | 0.804 |
| 平面圆柱角接 | 0.594 |
| 平面折线 | 2.118 |
| 平面曲线 | 2.026 |
| 平面曲面 | 1.954 |
Table 4 Algorithm running time after workpiece
| 焊缝类型 | 运行时间/s |
|---|---|
| 简单直线 | 0.804 |
| 平面圆柱角接 | 0.594 |
| 平面折线 | 2.118 |
| 平面曲线 | 2.026 |
| 平面曲面 | 1.954 |
| [1] | 时尚,刘丰刚,黄春平,等.激光复合热源焊接技术的研究进展[J].材料导报,2022,36(11):170-177. |
| Shi Shang, Liu Feng-gang, Huang Chun-ping, et al. Research progress of laser hybrid heat source welding technology [J]. Materials Reports, 2022, 36(11):170-177. | |
| [2] | Zhang Y K, Jiang Y, Tian X C, et al. A point cloud-based welding trajectory planning method for plane welds[J]. The International Journal of Advanced Manufacturing Technology, 2023, 125(3): 1645-1659. |
| [3] | Li X D, Li X H, Ge S S, et al. Automatic welding seam tracking and identification[J]. IEEE Transactions on Industrial Electronics, 2017, 64(9): 7261-7271. |
| [4] | Ye Z, Fang G, Chen S B, et al. A robust algorithm for weld seam extraction based on prior knowledge of weld seam[J]. Sensor Review, 2013, 33(2): 125-133. |
| [5] | Wu K X, Wang T Q, He J J, et al. Autonomous seam recognition and feature extraction for multi-pass welding based on laser stripe edge guidance network[J]. The International Journal of Advanced Manufacturing Technology, 2020, 111(9): 2719-2731. |
| [6] | Liu F Q, Wang Z Y, Ji Y. Precise initial weld position identification of a fillet weld seam using laser vision technology[J]. The International Journal of Advanced Manufacturing Technology, 2018, 99(5): 2059-2068. |
| [7] | Xu Y L, Lyu N, Fang G, et al. Welding seam tracking in robotic gas metal arc welding[J]. Journal of Materials Processing Technology, 2017, 248: 18-30. |
| [8] | Yang L, Li E, Long T, et al. A high-speed seam extraction method based on the novel structured-light sensor for arc welding robot: a review[J]. IEEE Sensors Journal, 2018, 18(21): 8631-8641. |
| [9] | Ibanez I, Aguirre M A, Torralba A, et al. A low cost 3D vision system for positioning welding mobile robots using a FPGA prototyping system[C]//IEEE 2002 28th Annual Conference of the Industrial Electronics Society. Seville, 2002: 1590-1593. |
| [10] | Zhou P, Peng R, Xu M, et al. Path planning with automatic seam extraction over point cloud models for robotic arc welding[J]. IEEE Robotics and Automation Letters, 2021, 6(3): 5002-5009. |
| [11] | Gao J, Li F, Zhang C, et al. A method of D-type weld seam extraction based on point clouds[J]. IEEE Access, 2021, 9: 65401-65410. |
| [12] | Kim J, Lee J, Chung M, et al. Multiple weld seam extraction from RGB-depth images for automatic robotic welding via point cloud registration[J]. Multimedia Tools and Applications, 2021, 80(6): 9703-9719. |
| [13] | Shen Z Y, Feydy J, Liu P R, et al. Accurate point cloud registration with robust optimal transport[J]. Advances in Neural Information Processing Systems, 2021, 34: 5373-5389. |
| [14] | Tsai R Y, Lenz R K. A new technique for fully autonomous and efficient 3D robotics hand/eye calibration[J]. IEEE Transactions on Robotics and Automation, 1989, 5(3): 345-358. |
| [15] | 朴永杰,邱涛,陈善本.弧焊机器人TCF参数的标定[J].机器人, 2001, 23(2):109-112. |
| Yong-jie Piao, Qiu Tao, Chen Shan-ben. Calibration of TCF parameters of arc welding robot [J]. Robot, 2001, 23(2):109-112. | |
| [16] | Ni H, Lin X G, Ning X G, et al. Edge detection and feature line tracing in 3D-point clouds by analyzing geometric properties of neighborhoods[J]. Remote Sensing, 2016, 8(9): 710. |
| [17] | Zhang J X, Lin X G, Ning X G. SVM-based classification of segmented airborne LiDAR point clouds in urban areas[J]. Remote Sensing, 2013, 5(8): 3749-3775. |
| [18] | 潘日晶. NURBS 曲线曲面的显式矩阵表示及其算法[J]. 计算机学报, 2001, 24(4): 358-366. |
| Pan Ri-jing. Explicit matrix representation for NURBS curves and surfaces and its algorithm [J].Chinese Journal of Computers, 2001, 24(4): 358-366. | |
| [19] | Sun K K, Hua C T, Xiong X M. Research on spatial arc fitting method based on RANSAN algorithm[C]//2019 Chinese Control Conference (CCC) .Guangzhou, 2019: 7534-7538. |
| [20] | 刘立君,戴鸿滨,高洪明,等.力觉遥示教姿态几何平面法[J].中国机械工程,2008,19(18):2249-2252. |
| Liu Li-jun, Dai Hong-bin, Gao Hong-ming, et al. Geometry arithmetic on the tele-teaching pose based on force sensing [J]. China Mechanical Engineering, 2008,19(18):2249-2252. |
| [1] | Li-zhen LI, Shu-hua MA, Ze-xu GUO, Xiao-chen CHE. X-ray Image Prohibited Item Detection Algorithm Based on X-ray-RTDETR [J]. Journal of Northeastern University(Natural Science), 2025, 46(6): 8-15. |
| [2] | Hong GUAN, Qian XIONG, Hui MA, Wei-wei WANG. Fault Feature Extraction and Analysis of Rotating Blade Cracks [J]. Journal of Northeastern University(Natural Science), 2025, 46(3): 60-68. |
| [3] | Zhi WANG, Kun WANG, Meng-qing WANG. Super-resolution Reconstruction of Remote Sensing Image Based on Transformer of Multi-scale Feature Fusion [J]. Journal of Northeastern University(Natural Science), 2024, 45(8): 1178-1184. |
| [4] | Yuan MA, Li-huang SHE, Jia-wei LI, Xi-rong BAO. Adaptive Graph Convolutional 3D Point Cloud Recognition Algorithm Based on Attention Mechanism [J]. Journal of Northeastern University(Natural Science), 2024, 45(6): 786-792. |
| [5] | Xiao-peng SHA, Jia-qi CAO, Wen-jing LI, Ye QIN. Three-Dimensional Reconstruction Method of Monocular Video Image Sequences [J]. Journal of Northeastern University(Natural Science), 2024, 45(12): 1680-1687. |
| [6] | LI Shou-tao, QU Ru-yi, ZHANG Yu, YU Ding-li. Freezing of Gait Recognition Method Based on Variational Mode Decomposition [J]. Journal of Northeastern University(Natural Science), 2023, 44(11): 1543-1548. |
| [7] | LIU Yang, YAN Dong-mei, MENG Fan-wei. Improved Two-Branch Person Re-identification Algorithm Based on Transformer [J]. Journal of Northeastern University(Natural Science), 2023, 44(1): 26-32. |
| [8] | WANG Na, LI Yang, PENG Kun. Method of Actuator Fault Diagnosis via Multiple Angles Feature Extraction [J]. Journal of Northeastern University(Natural Science), 2022, 43(9): 1240-1249. |
| [9] | WANG Shu-hong, WEI Wei, CHEN Hao, YIN Hong. Identification and Grouping Method of Strike Information of Rock Mass Based on the HDBSCAN Algorithm [J]. Journal of Northeastern University(Natural Science), 2022, 43(6): 888-896. |
| [10] | YU Zhe-zhou, LIU Yan, LIU Yuan-ning. Improved Iris Locating Algorithm Based on YOLOV3 [J]. Journal of Northeastern University(Natural Science), 2022, 43(4): 496-501. |
| [11] | YAN Kang, HUANG Xun-jiang, ZHANG Qiang, WANG Deng. Identification of Product Innovation Features Based on At-LSTM [J]. Journal of Northeastern University(Natural Science), 2022, 43(10): 1506-1512. |
| [12] | WANG Zhi, AN Shi-yuan, ZOU Jun, ZHANG Zi-rui. Step Line Extraction from Point Cloud Data of Open-Pit Mine [J]. Journal of Northeastern University(Natural Science), 2021, 42(9): 1323-1328. |
| [13] | REN Zhao-hui, YU Tian-zhuang, DING Dong, ZHOU Shi-hua. Fault Diagnosis Method of Rolling Bearing Based on VMD-DBN [J]. Journal of Northeastern University(Natural Science), 2021, 42(8): 1105-1110. |
| [14] | MAO Ya-chun, FU Yu-wen, CAO Wang, ZHAO Zhan-guo. Extraction Method of Open Pit Mine Car Based on UAV Point Cloud Data [J]. Journal of Northeastern University(Natural Science), 2021, 42(6): 842-849. |
| [15] | HAN Peng, GUO Tian, WANG Jin-kuan, SHI Ze-wei. PV Power Forecasting with Univariate Input Based on mRMR-ESN [J]. Journal of Northeastern University(Natural Science), 2021, 42(2): 174-179. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||