Journal of Northeastern University(Natural Science) ›› 2024, Vol. 45 ›› Issue (2): 209-216.DOI: 10.12068/j.issn.1005-3026.2024.02.008
• Mechanical Engineering • Previous Articles
Zhao-hui REN, Yu-lin LIU, Ze-yu JIANG, Xiang-yu CHEN
Received:2022-09-07
Online:2024-02-15
Published:2024-05-14
CLC Number:
Zhao-hui REN, Yu-lin LIU, Ze-yu JIANG, Xiang-yu CHEN. Adaptive Fault-Tolerant Control of Quadrotor UAV Based on Fuzzy Gain Sliding Mode[J]. Journal of Northeastern University(Natural Science), 2024, 45(2): 209-216.
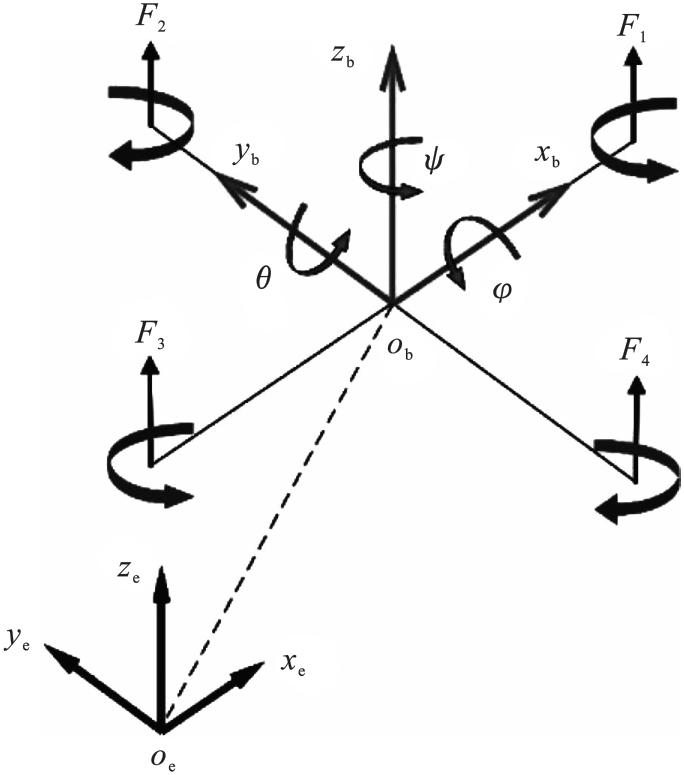
Fig. 1 Ground coordinate system and body coordinate system
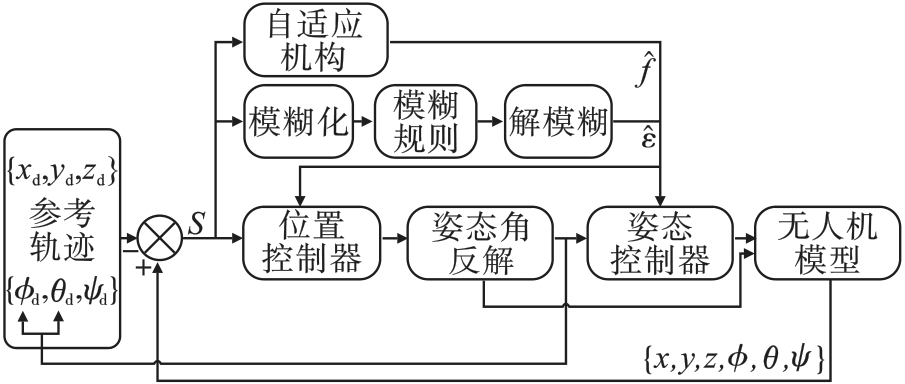
Fig. 2 Controller structure
| 参数 | 数值 | 单位 |
|---|---|---|
| l | 0.275 | m |
| m | 1.5 | kg |
| g | 9.81 | m/s2 |
| Ix | 3.259×10-2 | kg·m2 |
| Iy | 3.259×10-2 | kg·m2 |
| Iz | 6.059×10-2 | kg·m2 |
Table 1 Physical parameters of quadrotor UAV
| 参数 | 数值 | 单位 |
|---|---|---|
| l | 0.275 | m |
| m | 1.5 | kg |
| g | 9.81 | m/s2 |
| Ix | 3.259×10-2 | kg·m2 |
| Iy | 3.259×10-2 | kg·m2 |
| Iz | 6.059×10-2 | kg·m2 |
| 参数 | 符号 | 数值 |
|---|---|---|
| 指数趋近律增益 | ||
| 滑模面增益 | ||
| 自适应增益 |
Table 2 Control parameters
| 参数 | 符号 | 数值 |
|---|---|---|
| 指数趋近律增益 | ||
| 滑模面增益 | ||
| 自适应增益 |
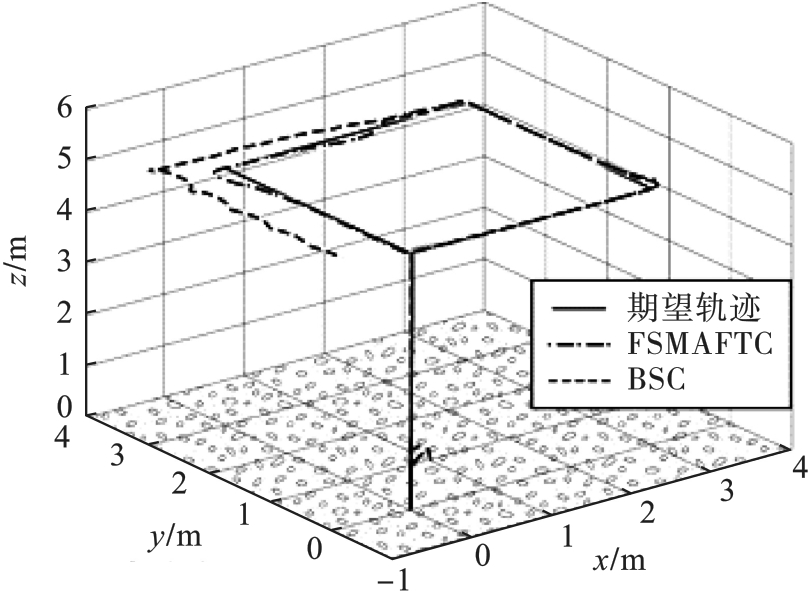
Fig. 3 Comparison of trajectory tracking effect
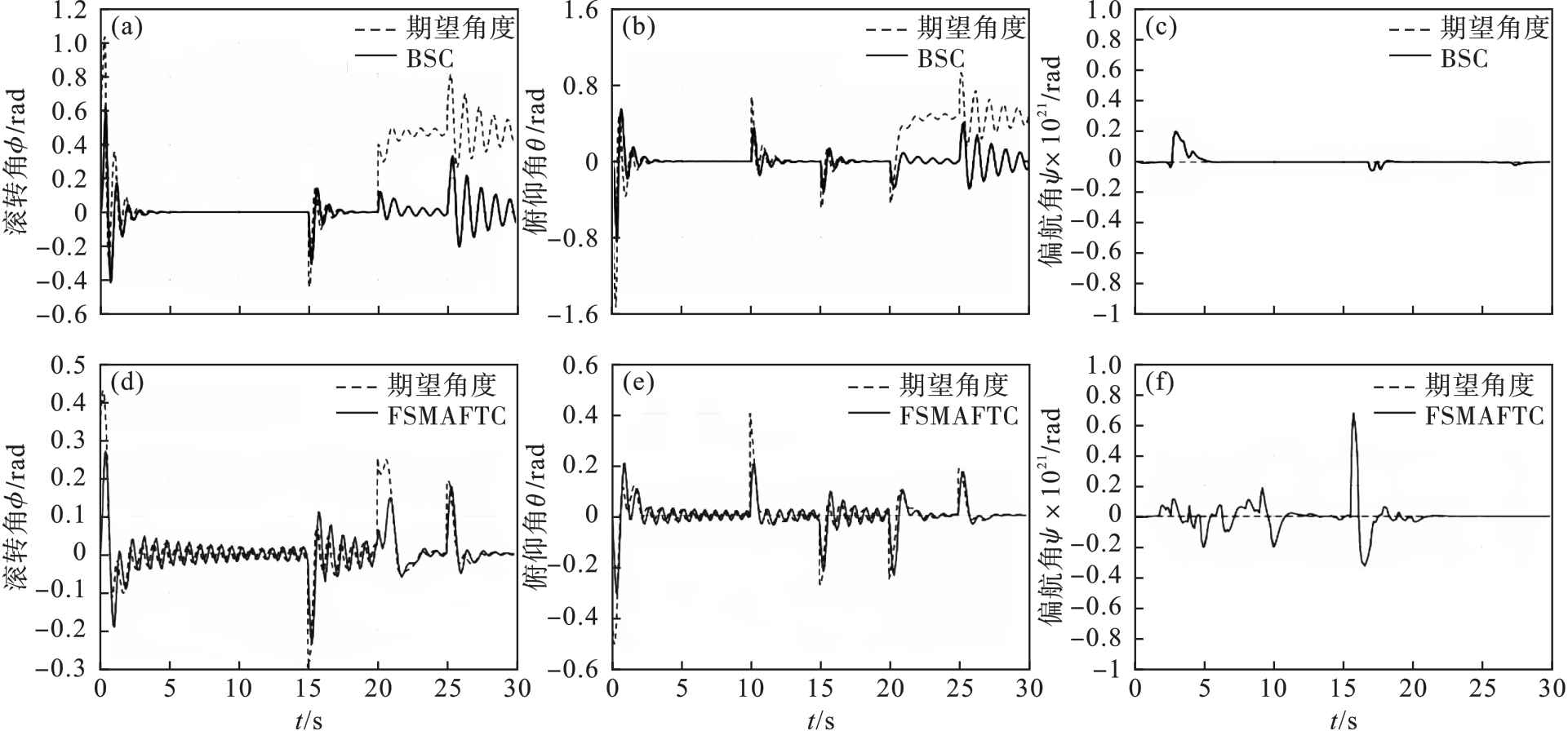
Fig. 4 Comparison of attitude tracking effect
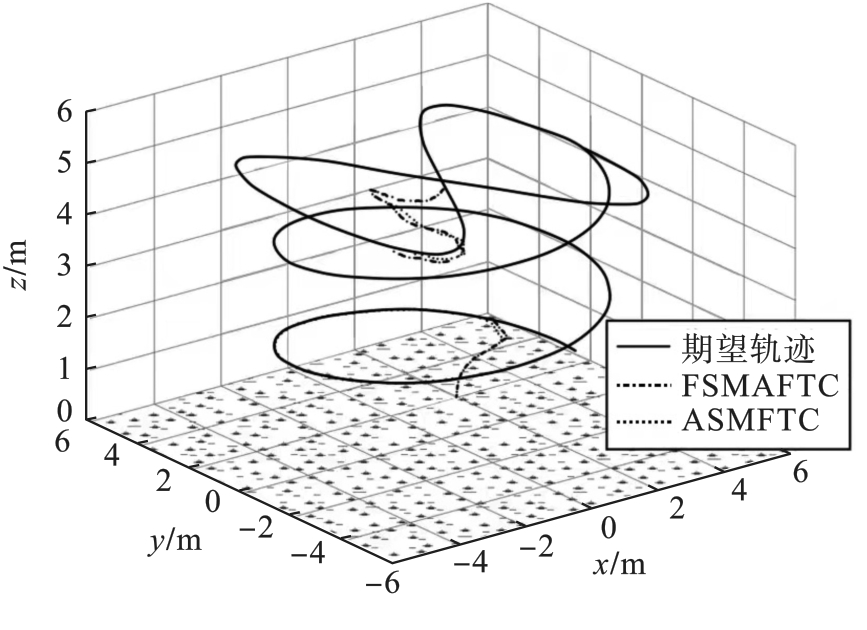
Fig. 5 Comparison of trajectory tracking effect
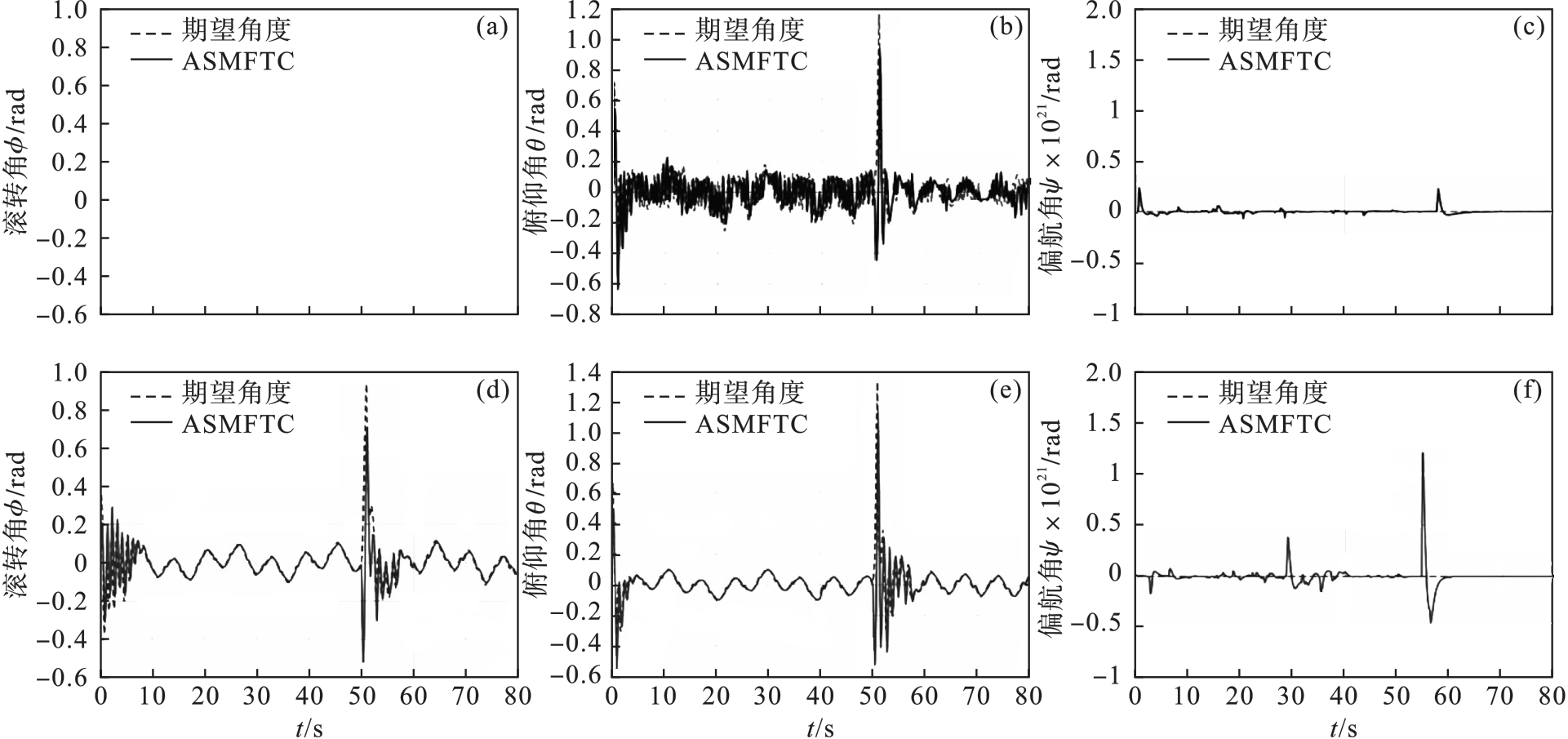
Fig. 6 Comparison of attitude tracking effect
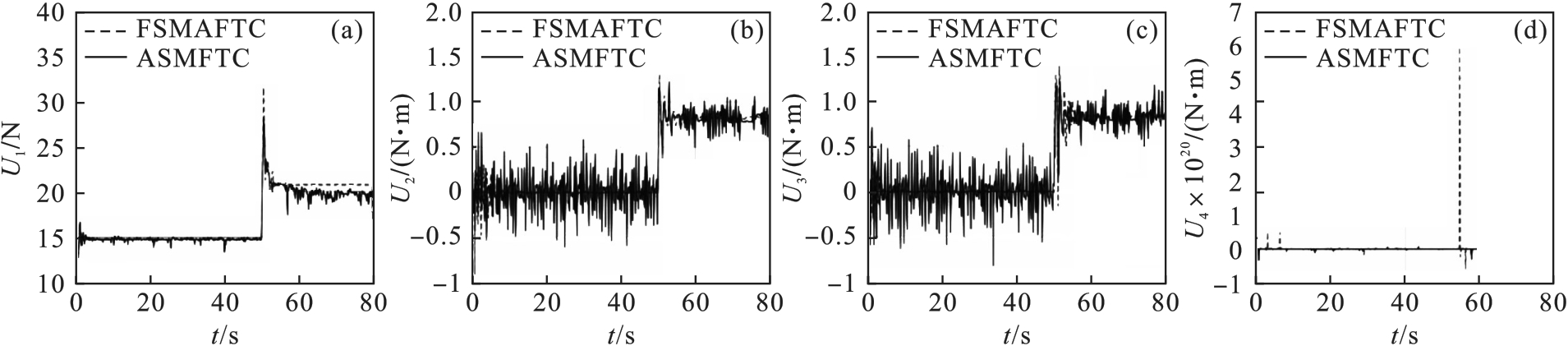
Fig. 7 Comparison of control inputs effect
| 1 | Zhao B, Xian B, Zhang Y,et al.Nonlinear robust adaptive tracking control of a quadrotor UAV via immersion and invariance methodology[J].IEEE Transactions on Industrial Electronics,2014,62(5):2891-2902. |
| 2 | Das A, Lewis F, Subbarao K.Backstepping approach for controlling a quadrotor using lagrange form dynamics[J].Journal of Intelligent and Robotic Systems,2009,56(1/2):127-151. |
| 3 | Zhao B, Xian B, Zhang Y,et al.Nonlinear robust sliding mode control of a quadrotor unmanned aerial vehicle based on immersion and invariance method[J].International Journal of Robust and Nonlinear Control,2015,25(18):3714-3731. |
| 4 | Slam S, Liu P X, El S A. Robust control of four‐rotor unmanned aerial vehicle with disturbance uncertainty[J].IEEE Transactions on Industrial Electronics,2014,62(3):1563-1571. |
| 5 | 张居乾,师玉茹,任朝晖,等.基于扩张观测器的四旋翼无人机轨迹鲁棒滑模控制[J].中国惯性技术学报,2018,26(2):247-254. |
| Zhang Ju‐qian, Shi Yu‐ru, Ren Zhao‐hui,et al.Robust sliding mode control for quadrotor UAV trajectory based on extended state observer[J].Journal of Chinese Inertial Technology,2018,26(2):247-254. | |
| 6 | Zhang J Q, Ren Z H, Dend C,et al.Adaptive fuzzy global sliding mode control for trajectory tracking of quadrotor UAVs[J].Nonlinear Dynamics,2019,97(1):609-627. |
| 7 | Ma C, Chen M Z Q, Lam J,et al.A novel body frame based approach to aerospace craft attitude tracking[J].ISA Transactions,2017,70:228-237. |
| 8 | Islam S, Liu P X, El S A.Robust control of four‐rotor unmanned aerial vehicle with disturbance uncertainty[J].IEEE Transactions on Industrial Electronics,2015,62(3):1563-1571. |
| 9 | 刘栩粼,郭玉英.四旋翼无人机时延模糊自抗扰容错控制[J].测控技术,2020,39(1):55-60. |
| Liu Xu‐lin, Guo Yu‐ying.Fault‐tolerant control of quadrotor UAV based on fuzzy active disturbance rejection control and time delay control[J].Measurement & Control Technology,2020,39(1):55-60. | |
| 10 | Chen F Y, Jiang R Q, Zhang K K,et al.Robust backstepping sliding‐mode control and observer‐based fault estimation for a quadrotor UAV[J].IEEE Transactions on Industrial Electronics,2016,63(8):5044-5056. |
| 11 | Mallavalli S, Fekih A.A fault tolerant tracking control for a quadrotor UAV subject to simultaneous actuator faults and exogenous disturbances[J].International Journal of Control,2020,93(3):655-668. |
| 12 | 郝伟,鲜斌.四旋翼无人机姿态系统的非线性容错控制设计[J].控制理论与应用,2015,32(11):1457-1463. |
| Hao Wei, Xian Bin.Nonlinear fault tolerant control design for quadrotor unmanned aerial vehicle attitude system[J].Control Theory & Applications,2015,32(11):1457-1463. | |
| 13 | Li M, Zuo Z Y, Liu H,et al.Adaptive fault tolerant control for trajectory tracking of a quadrotor helicopter[J].Transactions of the Institute of Measurement and Control,2018,40(12):3560-3569. |
| 14 | 郑佳静,李平.一种基于内外环结构的四旋翼飞行器容错控制方法[J].中南大学学报(自然科学版),2019,50(3):572-578. |
| Zheng Jia‐jing, Li Ping.A fault tolerant control method for quadrotor based on inner and outer loops[J].Journal of Central South University(Science and Technology),2019,50(3):572-578. | |
| 15 | 赵广磊,高儒帅,陈健楠.具有执行器故障的四旋翼无人机自适应预定性能控制[J].控制与决策,2021,36(9):2103-2112. |
| Zhao Guang‐lei, Gao Ru‐shuai, Chen Jian‐nan.Adaptive prescribed performance control of quadrotor with unknown actuator fault[J].Control and Decision,2021,36(9):2103-2112. | |
| 16 | Zhou S, Guo K, Yu X,et al.Fixed‐time observer based safety control for a quadrotor UAV[J].IEEE Transactions on Aerospace and Electronic Systems,2021,57(5):2815-2825. |
| 17 | Sun M X. A Barbalat‐like lemma with its application to learning control[J].IEEE Transactions on Automatic Control,2009,54(9):2222-2225. |
| [1] | ZHOU Juan, BAI Li-ping. Dissipative Fuzzy Control for Singular Markovian Jump Systems with Generally Uncertain Transition Rates [J]. Journal of Northeastern University(Natural Science), 2023, 44(9): 1217-1226. |
| [2] | XU Jia-zhong, ZHAO Hui, FU Tian-yu, ZHANG Cheng-dong. Temperature Control Algorithm of Induction Heating CFRP [J]. Journal of Northeastern University(Natural Science), 2022, 43(1): 17-24. |
| [3] | TANG Chuan-yin, ZHAO Yi-feng, ZHAO Ya-feng, ZHOU Shu-wen. Research on the Trajectory Tracking Control Method of Intelligent Vehicles [J]. Journal of Northeastern University Natural Science, 2020, 41(9): 1297-1303. |
| [4] | YANG Dong-mei, CHEN Jin-ying. Adaptive State Feedback Control of Nonlinear Switched Singular Systems [J]. Journal of Northeastern University Natural Science, 2019, 40(6): 761-765. |
| [5] | GUO Li-xin, CHEN Cong-gen, ZHAO Lin. Integrated Variable Gain LQR Control of Seat Suspension and Automobile Suspension [J]. Journal of Northeastern University Natural Science, 2019, 40(3): 398-403. |
| [6] | ZHAO Hai, GUO Hong-ye, SI Shuai-zong, ZHU Jian. Automatic Control Method and Performance Analysis of Platoon Vehicles [J]. Journal of Northeastern University Natural Science, 2018, 39(6): 781-786. |
| [7] | SHA Yi, FAN Qian-wen, ZHANG Li-li, ZHU Li-chun. FAST Node Displacement Control Method Using Self-Tunning Fuzzy PID Control [J]. Journal of Northeastern University Natural Science, 2018, 39(4): 487-491. |
| [8] | WANG Hong, ZHENG Tian-qi, JI Li, LU Zhi-guo. Six-Axis Manipulator’s Sliding Mode Robust Control Based on T-S Fuzzy Compensation [J]. Journal of Northeastern University Natural Science, 2018, 39(3): 378-383. |
| [9] | ZHOU Lai-hong, DOU Jing-xin, ZHANG Ju-qian, WEN Bang-chun. Trajectory Tracking Control for a Quadrotor UAV Based on Improved Backstepping [J]. Journal of Northeastern University Natural Science, 2018, 39(1): 66-70. |
| [10] | WANG Hong, ZHENG Tian-qi. RBF Network Adaptive Control Based on SMC Compensation for Six-axis Manipulator [J]. Journal of Northeastern University Natural Science, 2017, 38(11): 1601-1606. |
| [11] | LIU Xin-rui, YANG Dong-sheng, LIU Shuang, HOU Xin-ming. Fuzzy H∞ Controllers Design Approach for Steam Valve Opening of Multi-machine Power Systems with Mixed Time-Varying Delays [J]. Journal of Northeastern University Natural Science, 2016, 37(6): 761-765. |
| [12] | CHEN Ze-yu, YANG Ying, WANG Xin-chao, LYU Ming. Control Strategy of Regenerative Braking for Plug-in Parallel Hybrid Electric Vehicles [J]. Journal of Northeastern University Natural Science, 2016, 37(12): 1750-1755. |
| [13] | DOU Jing-xin, KONG Xiang-xi, WEN Bang-chun. Backstepping Sliding Mode Active Disturbance Rejection Control of Quadrotor Attitude and Its Stability [J]. Journal of Northeastern University Natural Science, 2016, 37(10): 1415-1420. |
| [14] | WANG Jian-hua, ZHANG Qing-ling, PANG Bo. Reliable Control for Discrete-Time Markovian Jump Systems with Partly Unknown Transition Probabilities [J]. Journal of Northeastern University Natural Science, 2015, 36(4): 457-461. |
| [15] | YANG Dong, ZHAO Jun. Reliable Control for Stochastic Jump Systems with Actuator Failures [J]. Journal of Northeastern University Natural Science, 2015, 36(2): 153-156. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||