Journal of Northeastern University(Natural Science) ›› 2025, Vol. 46 ›› Issue (4): 52-60.DOI: 10.12068/j.issn.1005-3026.2025.20230294
• Mechanical Engineering • Previous Articles Next Articles
Xiao-peng LI1, Hai-long LIU1, Xing FAN1, Bing SHI2
Received:2023-10-23
Online:2025-04-15
Published:2025-07-01
CLC Number:
Xiao-peng LI, Hai-long LIU, Xing FAN, Bing SHI. Performance Analysis of Base Rotational Joint Under Obstacle Crossing Condition for Transmission Line Inspection Robot[J]. Journal of Northeastern University(Natural Science), 2025, 46(4): 52-60.
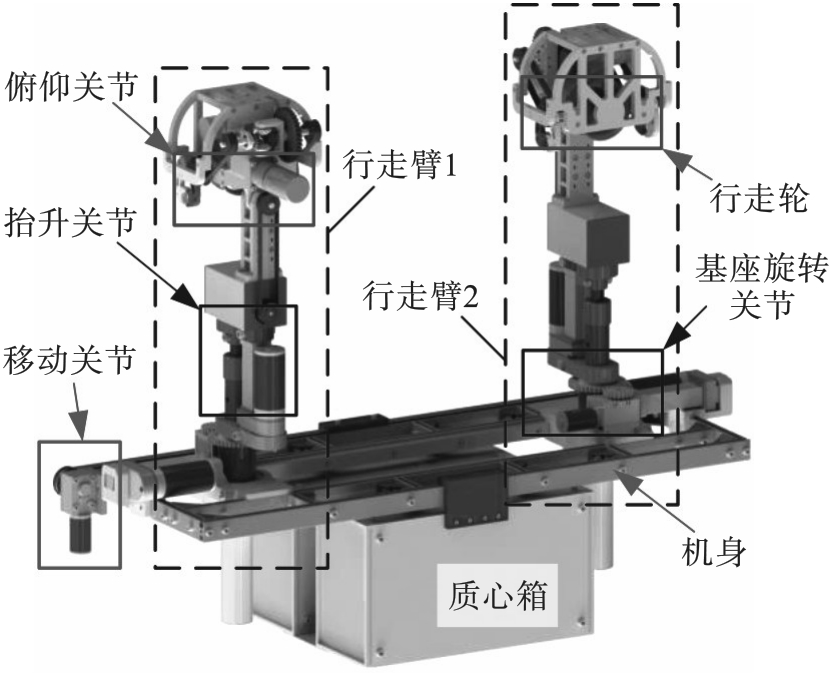
Fig.1 Multi-joint dual-arm inspection robot model
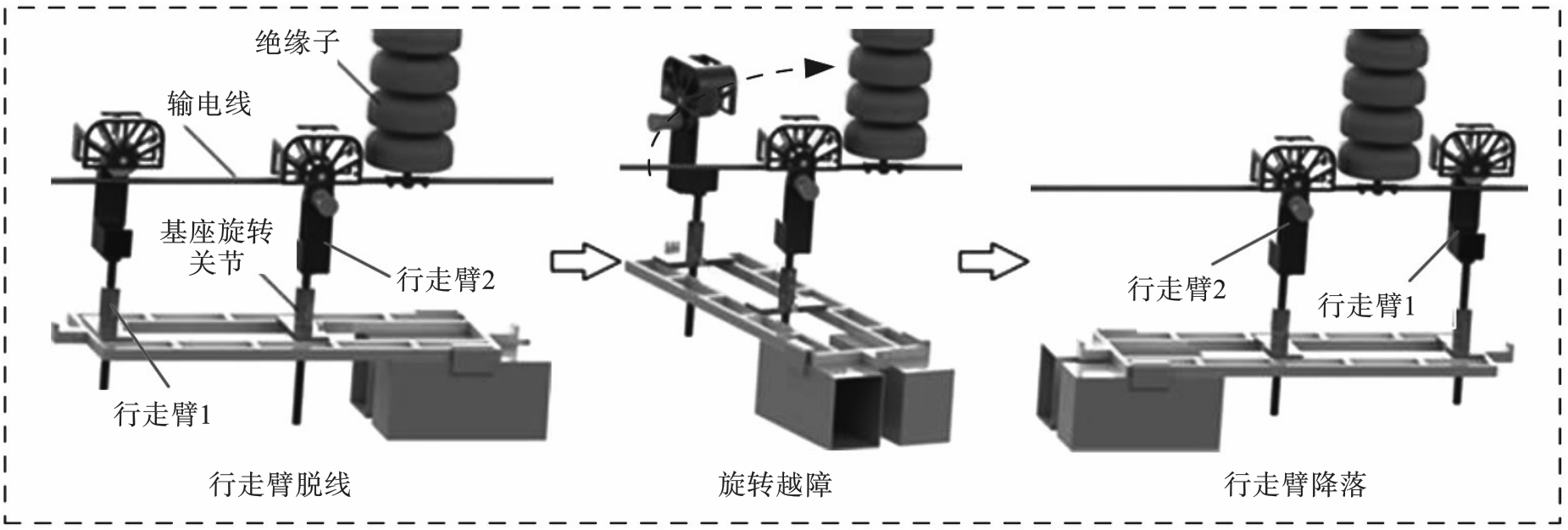
Fig.2 Obstacle crossing process
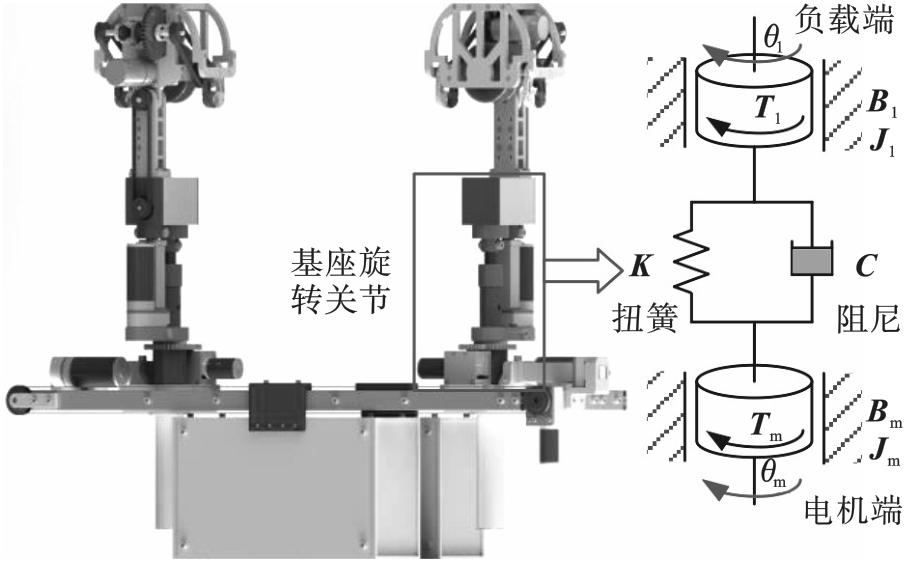
Fig.3 Model of simplified joint
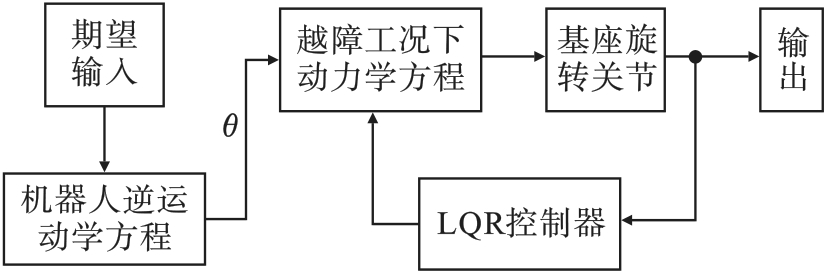
Fig.4 Control flow chart of the base rotation joint
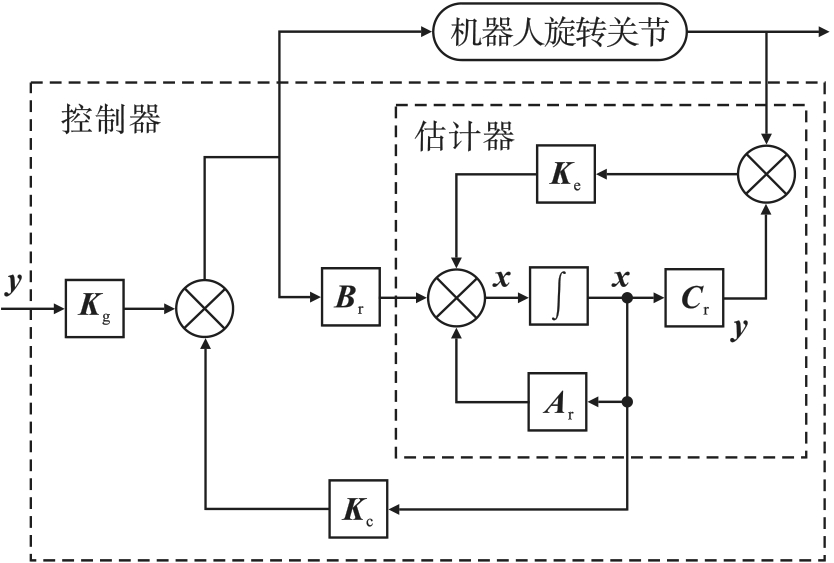
Fig.5 Structure of the LQR controller
| 名称 | 符号 | 单位 | 数值 |
|---|---|---|---|
| 负载转动惯量 | |||
| 负载阻尼系数 | 0.05 | ||
| 传动系统扭转刚度 | K | 1.3 | |
| 传动系统扭转阻尼 | C | 0.05 |
Table 1 Parameters of the robot rotation joint
| 名称 | 符号 | 单位 | 数值 |
|---|---|---|---|
| 负载转动惯量 | |||
| 负载阻尼系数 | 0.05 | ||
| 传动系统扭转刚度 | K | 1.3 | |
| 传动系统扭转阻尼 | C | 0.05 |
| 序号 | |||
|---|---|---|---|
| 1 | 100 | 0.1 | 0.1 |
| 2 | 50 | 1 | 1 |
| 3 | 100 | 1 | 50 |
| 4 | 100 | 0.1 | 100 |
Table 2 Parameters of Qc and Rc
| 序号 | |||
|---|---|---|---|
| 1 | 100 | 0.1 | 0.1 |
| 2 | 50 | 1 | 1 |
| 3 | 100 | 1 | 50 |
| 4 | 100 | 0.1 | 100 |
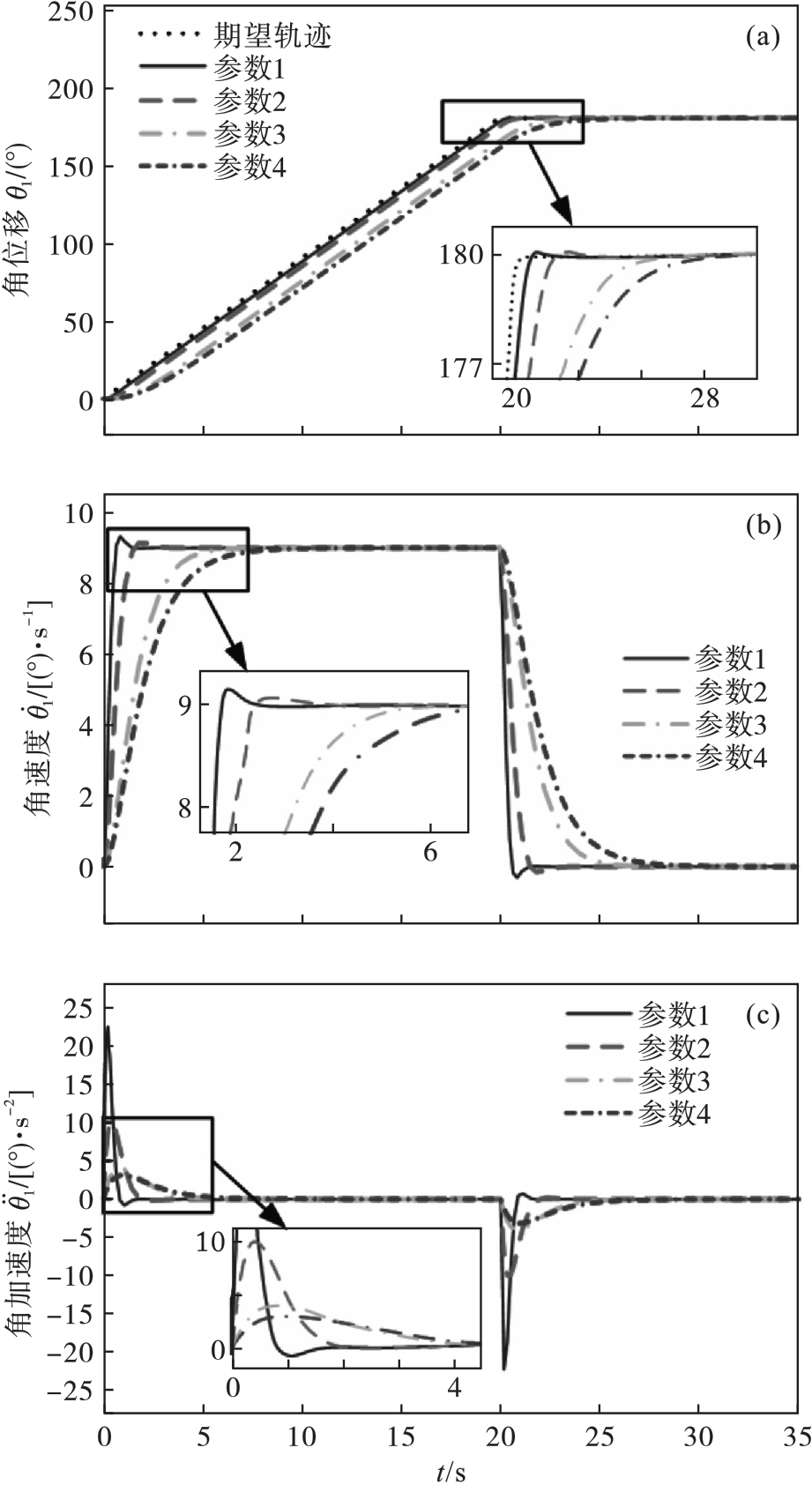
Fig.6 Time domain response comparison of the rotary joint with different parameters
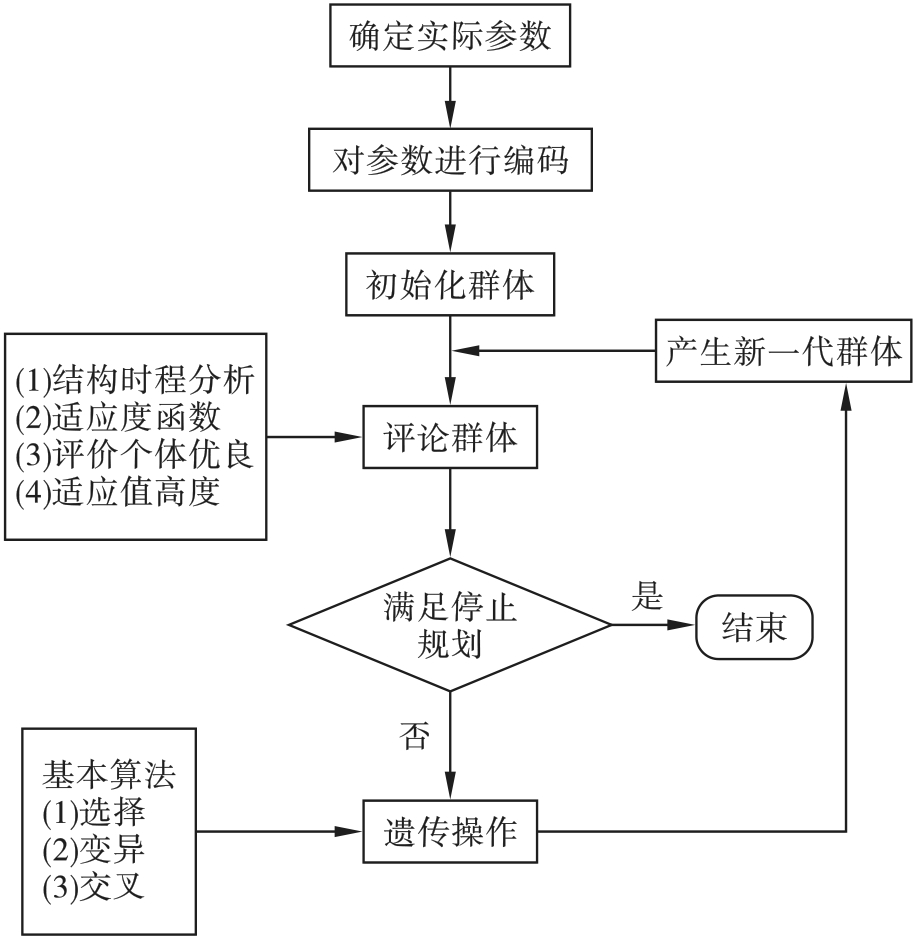
Fig.7 Flow chart of optimization based on genetic algorithm[18]
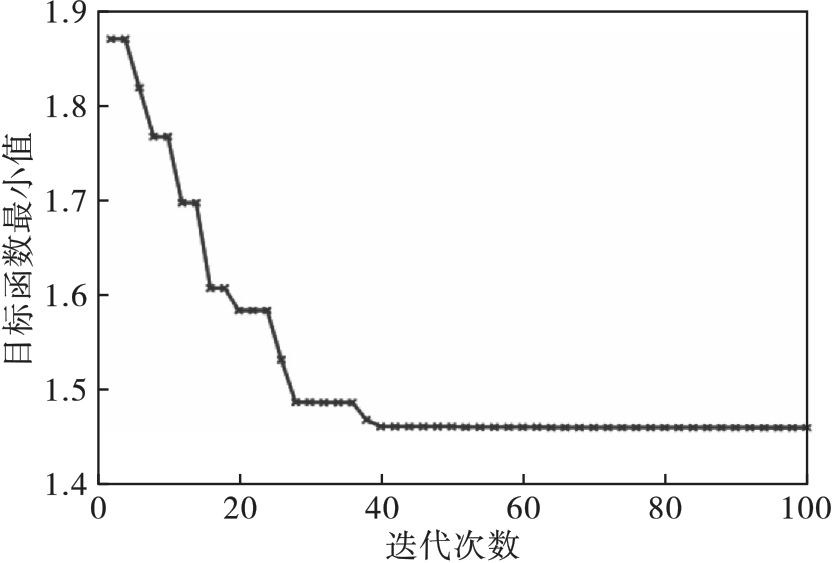
Fig.8 Evolutionary curve of GA
| Mp/(°) | Mp/(°) | ||||||
|---|---|---|---|---|---|---|---|
| 10 | 4.524 | 0.090 | 6.437 | 60 | 3.092 | 0.179 | 10.92 |
| 20 | 3.668 | 0.127 | 8.050 | 70 | 3.035 | 0.176 | 11.41 |
| 30 | 3.537 | 0.167 | 9.036 | 80 | 2.932 | 0.177 | 11.79 |
| 40 | 3.456 | 0.173 | 9.769 | 90 | 2.830 | 0.178 | 12.22 |
| 50 | 2.770 | 0.165 | 10.39 | 100 | 2.696 | 0.181 | 12.53 |
Table 3 Simulation results with different η1
| Mp/(°) | Mp/(°) | ||||||
|---|---|---|---|---|---|---|---|
| 10 | 4.524 | 0.090 | 6.437 | 60 | 3.092 | 0.179 | 10.92 |
| 20 | 3.668 | 0.127 | 8.050 | 70 | 3.035 | 0.176 | 11.41 |
| 30 | 3.537 | 0.167 | 9.036 | 80 | 2.932 | 0.177 | 11.79 |
| 40 | 3.456 | 0.173 | 9.769 | 90 | 2.830 | 0.178 | 12.22 |
| 50 | 2.770 | 0.165 | 10.39 | 100 | 2.696 | 0.181 | 12.53 |
| Mp/(°) | Mp/(°) | ||||||
|---|---|---|---|---|---|---|---|
| 0.01 | 2.770 | 0.165 | 10.39 | 0.5 | 3.234 | 0.158 | 10.30 |
| 0.1 | 3.035 | 0.202 | 10.38 | 0.6 | 3.184 | 0.154 | 10.30 |
| 0.2 | 3.037 | 0.197 | 10.36 | 0.7 | 3.316 | 0.149 | 10.29 |
| 0.3 | 2.747 | 0.155 | 10.34 | 0.8 | 3.254 | 0.146 | 10.27 |
| 0.4 | 3.309 | 0.161 | 10.32 | 0.9 | 3.203 | 0.141 | 10.24 |
Table 4 Simulation results with different η2
| Mp/(°) | Mp/(°) | ||||||
|---|---|---|---|---|---|---|---|
| 0.01 | 2.770 | 0.165 | 10.39 | 0.5 | 3.234 | 0.158 | 10.30 |
| 0.1 | 3.035 | 0.202 | 10.38 | 0.6 | 3.184 | 0.154 | 10.30 |
| 0.2 | 3.037 | 0.197 | 10.36 | 0.7 | 3.316 | 0.149 | 10.29 |
| 0.3 | 2.747 | 0.155 | 10.34 | 0.8 | 3.254 | 0.146 | 10.27 |
| 0.4 | 3.309 | 0.161 | 10.32 | 0.9 | 3.203 | 0.141 | 10.24 |
| Mp/(°) | Mp/(°) | ||||||
|---|---|---|---|---|---|---|---|
| 1 | 2.747 | 0.155 | 10.34 | 50 | 11.31 | — | 3.156 |
| 10 | 5.487 | 0.034 | 5.317 | 60 | 12.98 | — | 2.961 |
| 20 | 5.826 | — | 4.302 | 70 | 14.62 | — | 2.807 |
| 30 | 8.095 | — | 3.761 | 80 | 15.45 | — | 2.679 |
| 40 | 10.11 | — | 3.404 | 90 | 16.28 | — | 2.569 |
Table 5 Simulation results with different ξ
| Mp/(°) | Mp/(°) | ||||||
|---|---|---|---|---|---|---|---|
| 1 | 2.747 | 0.155 | 10.34 | 50 | 11.31 | — | 3.156 |
| 10 | 5.487 | 0.034 | 5.317 | 60 | 12.98 | — | 2.961 |
| 20 | 5.826 | — | 4.302 | 70 | 14.62 | — | 2.807 |
| 30 | 8.095 | — | 3.761 | 80 | 15.45 | — | 2.679 |
| 40 | 10.11 | — | 3.404 | 90 | 16.28 | — | 2.569 |
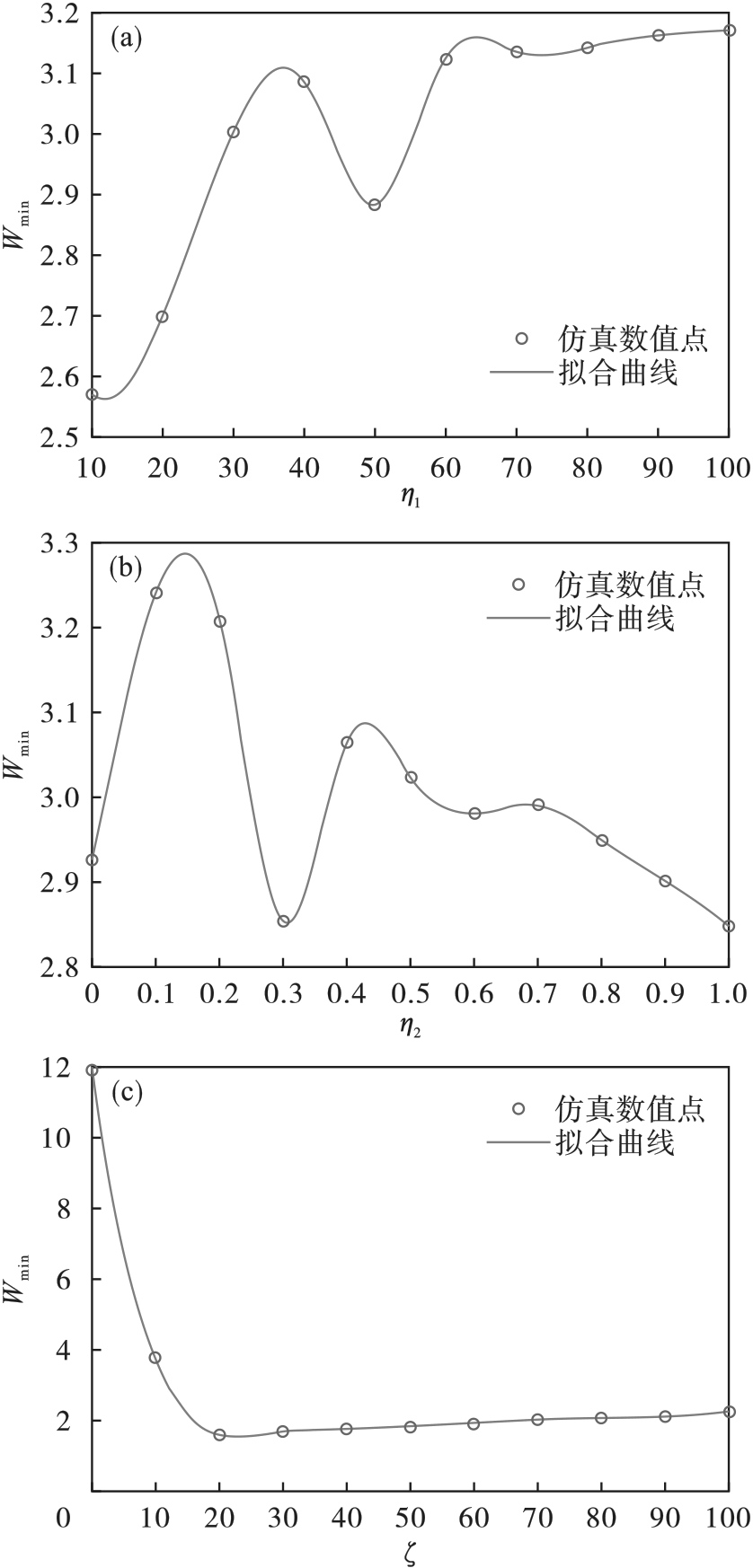
Fig.9 Influence curve of weight coefficient matrix parameters on the objective function
| 性能指标 | |||||
|---|---|---|---|---|---|
| (°) | |||||
| GA-LQR | 4.169 3 | 5.543 5 | 5.769 3 | 0.010 9 | 4.778 2 |
Table 6 Performance index after parameter
| 性能指标 | |||||
|---|---|---|---|---|---|
| (°) | |||||
| GA-LQR | 4.169 3 | 5.543 5 | 5.769 3 | 0.010 9 | 4.778 2 |
| 性能指标 | 参数1 | 参数2 | 参数3 | 参数4 | |
|---|---|---|---|---|---|
| 合计 | 33.35 | 32.38 | 9.493 | 9.732 | |
| -88.10 | -73.31 | 57.56 | 65.76 | ||
| -59.16 | -37.23 | 26.54 | 50.25 | ||
| -62.68 | -32.16 | 21.85 | 43.99 | ||
| 91.20 | 92.04 | — | — | ||
| 78.82 | 52.67 | -16.33 | -33.87 | ||
Table 7 Performance index comparison
| 性能指标 | 参数1 | 参数2 | 参数3 | 参数4 | |
|---|---|---|---|---|---|
| 合计 | 33.35 | 32.38 | 9.493 | 9.732 | |
| -88.10 | -73.31 | 57.56 | 65.76 | ||
| -59.16 | -37.23 | 26.54 | 50.25 | ||
| -62.68 | -32.16 | 21.85 | 43.99 | ||
| 91.20 | 92.04 | — | — | ||
| 78.82 | 52.67 | -16.33 | -33.87 | ||
| 越障阶段 | 运行关节 | 运行 时间/s | 运行速度 |
|---|---|---|---|
| 后臂抬升 | 后臂抬升关节 | 10 | 5 mm/s |
| 旋转越障 | 前臂基座旋转关节 | 20 | 9 (°)/s |
| 后臂基座旋转关节 | 20 | 9 (°)/s | |
| 后臂下降 | 前臂抬升关节 | 10 | 5 mm/s |
Table 8 Robot joint motion parameters
| 越障阶段 | 运行关节 | 运行 时间/s | 运行速度 |
|---|---|---|---|
| 后臂抬升 | 后臂抬升关节 | 10 | 5 mm/s |
| 旋转越障 | 前臂基座旋转关节 | 20 | 9 (°)/s |
| 后臂基座旋转关节 | 20 | 9 (°)/s | |
| 后臂下降 | 前臂抬升关节 | 10 | 5 mm/s |
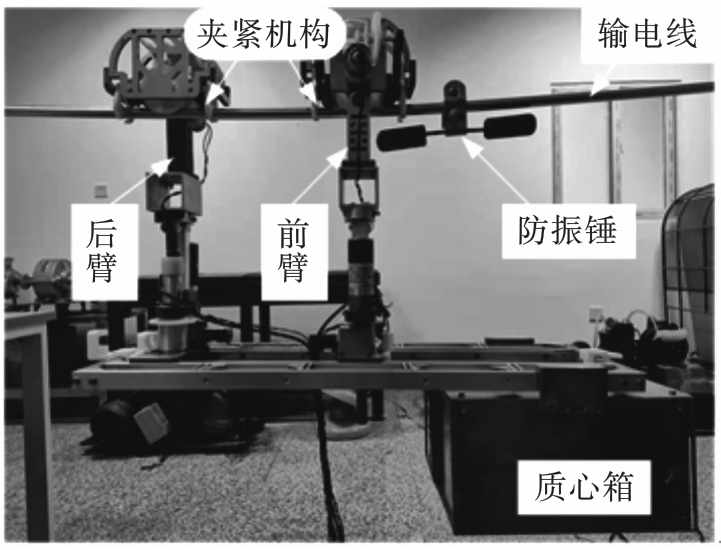
Fig.10 Inspection robot test prototype
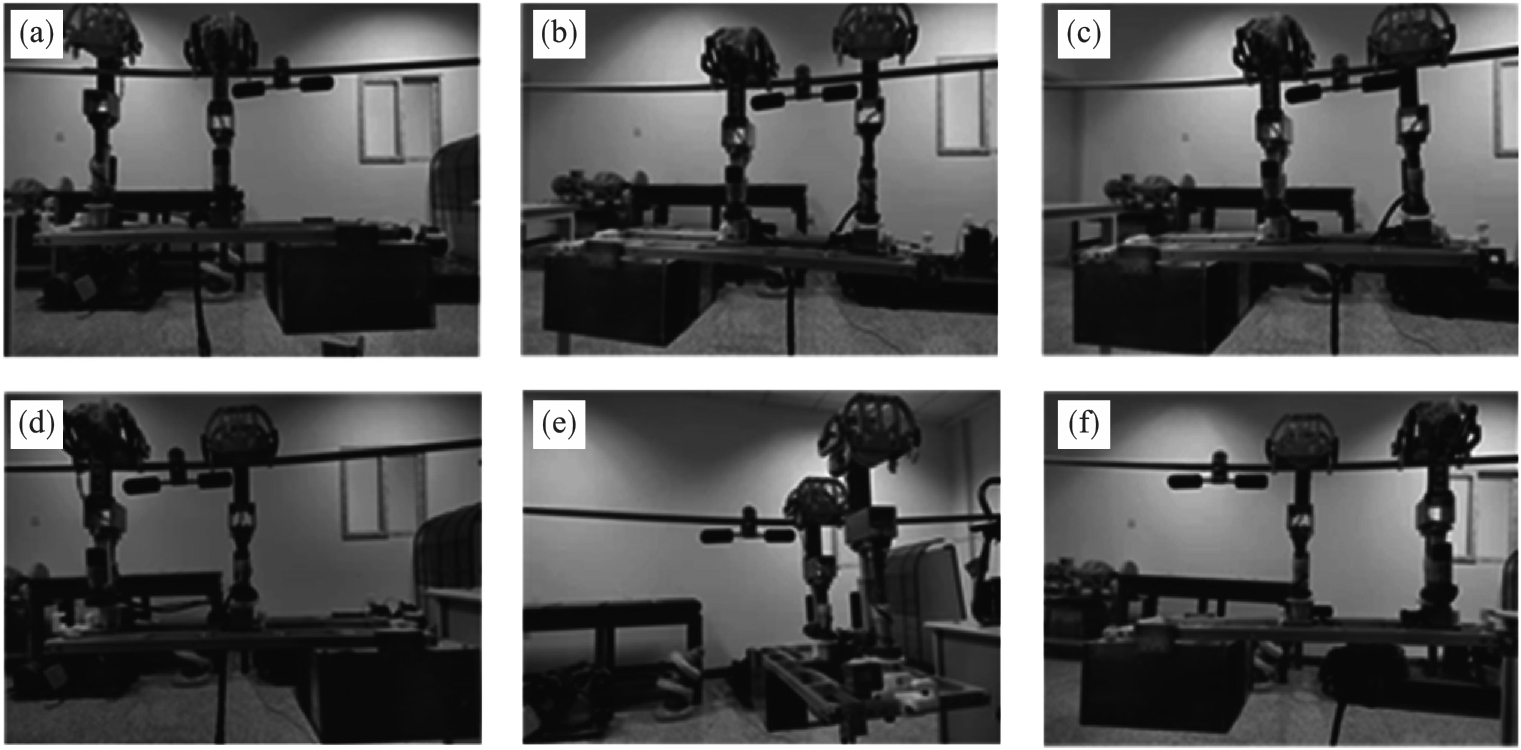
Fig.11 Obstacle crossing test for robot
| 性能指标 | GA-LQR | 参数1 | 参数2 | 参数3 | |
|---|---|---|---|---|---|
| 4.364 | 1.762 | 1.638 | 9.363 | ||
| 4.765 | 2.635 | 3.396 | 8.254 | ||
| 5.532 | 2.461 | 3.762 | 8.469 | ||
| 0.010 | 0.124 | 0.145 | — | ||
| 3.297 | 19.706 | 8.687 | 3.746 | ||
| 整体对比提升/% | — | 31.87 | 29.53 | 24.36 | |
Table 9 Experimental results for different controller parameters
| 性能指标 | GA-LQR | 参数1 | 参数2 | 参数3 | |
|---|---|---|---|---|---|
| 4.364 | 1.762 | 1.638 | 9.363 | ||
| 4.765 | 2.635 | 3.396 | 8.254 | ||
| 5.532 | 2.461 | 3.762 | 8.469 | ||
| 0.010 | 0.124 | 0.145 | — | ||
| 3.297 | 19.706 | 8.687 | 3.746 | ||
| 整体对比提升/% | — | 31.87 | 29.53 | 24.36 | |
| 1 | 王志轩. 新中国电气化发展七十年[J]. 中国能源, 2019, 41(10): 9-17. |
| Wang Zhi-xuan. Electrification development in 70 years[J]. Energy of China, 2019, 41(10): 9-17. | |
| 2 | Seok K H, Kim Y S. A state of the art of power transmission line maintenance robots[J]. Journal of Electrical Engineering and Technology, 2016, 11(5): 1412-1422. |
| 3 | 周军. 超高压输电线路运行维护安全管理的问题与应对策略[J]. 中外企业家, 2019(36): 111. |
| Zhou Jun. Problems and countermeasures of operation and maintenance safety management of EHV transmission lines[J]. Chinese & Foreign Entrepreneurs, 2019(36): 111. | |
| 4 | Sawada J, Ishikawa Y, Kobayashi Y, et al. Apparatus for tracking an overhead line and automatically moving around obstacles on the line: US5103739[P]. 1992-04-14. |
| 5 | Montambault S, Pouliot N. Design and validation of a mobile robot for power line inspection and maintenance[M]//Field and Service Robotics. Heidelberg: Springer, 2008: 495-504. |
| 6 | Kobayashi H, Nakamura H, Shimada T. An inspection robot for feeder cables—basic structure and control[C]//Proceedings IECON '91: International Conference on Industrial Electronics, Control and Instrumentation. Kobe, 1991: 992-995. |
| 7 | Pouliot N, Montambault S. LineScout technology: from inspection to robotic maintenance on live transmission power lines[C]//2009 IEEE International Conference on Robotics and Automation. Kobe, 2009: 1034-1040. |
| 8 | Alhassan A B, Zhang X D, Shen H M, et al. Power transmission line inspection robots: a review, trends and challenges for future research[J]. International Journal of Electrical Power & Energy Systems, 2020, 118: 105862. |
| 9 | Jia Y H, Hu Q, Xu S J. Dynamics and adaptive control of a dual-arm space robot with closed-loop constraints and uncertain inertial parameters[J]. Acta Mechanica Sinica, 2014, 30(1): 112-124. |
| 10 | Jamisola R S, Kormushev P S, Roberts R G, et al. Task-space modular dynamics for dual-arms expressed through a relative Jacobian[J]. Journal of Intelligent & Robotic Systems, 2016, 83(2): 205-218. |
| 11 | 李小彭, 尚东阳, 李凡杰, 等. 输电线巡检机器人动力学建模与DME评价[J]. 东北大学学报(自然科学版), 2020, 41(9): 1280-1284. |
| Li Xiao-peng, Shang Dong-yang, Li Fan-jie, et al. Dynamic modeling and DME evaluation of power transmission line inspection robots[J]. Journal of Northeastern University (Natural Science), 2020, 41(9): 1280-1284. | |
| 12 | Spong M W, Hutchinson S, Vidyasagar M. Robot modeling and control[J]. Industrial Robot International Journal, 2006, 17(5): 709-737. |
| 13 | Li X P, Fan X, Shang D Y, et al. Dynamic performance analysis based on the mechatronic system of power transmission line inspection robot with dual-arm[J]. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, 2023, 237(22): 5391-5408. |
| 14 | Chen M. Disturbance attenuation tracking control for wheeled mobile robots with skidding and slipping[J]. IEEE Transactions on Industrial Electronics, 2017, 64(4): 3359-3368. |
| 15 | 李小彭, 尚东阳, 李凡杰, 等. 输电线巡检机器人位姿变化的柔性关节控制策略[J]. 东北大学学报(自然科学版), 2020, 41(11): 1577-1583. |
| Li Xiao-peng, Shang Dong-yang, Li Fan-jie, et al. Flexible joint control strategy based on posture change of transmission line inspection robots[J]. Journal of Northeastern University (Natural Science), 2020, 41(11): 1577-1583. | |
| 16 | 武凌宇, 王晓东, 吴建德. 基于蚁群算法的机器人系统LQR最优控制研究[J]. 传感器与微系统, 2018, 37(1): 56-59. |
| Wu Ling-yu, Wang Xiao-dong, Wu Jian-de. Research on LQR optimal control of robot based on ant colony algorithm[J]. Transducer and Microsystem Technologies, 2018, 37(1): 56-59. | |
| 17 | Zhang S, Hao Y S, Wang M, et al. Multichannel Hankel matrix completion through nonconvex optimization[J]. IEEE Journal of Selected Topics in Signal Processing, 2018, 12(4): 617-632. |
| 18 | 侯仰强, 王天琪, 岳建锋, 等. 基于多目标遗传算法的双机器人协调焊接路径规划[J]. 中国机械工程, 2018, 29(16): 1984-1989. |
| Hou Yang-qiang, Wang Tian-qi, Yue Jian-feng, et al. Path planning for dual-robot coordinate welding based on multi-objective genetic algorithm[J]. China Mechanical Engineering, 2018, 29(16): 1984-1989. | |
| 19 | Afzalirad M, Shafipour M. Design of an efficient genetic algorithm for resource-constrained unrelated parallel machine scheduling problem with machine eligibility restrictions[J]. Journal of Intelligent Manufacturing, 2018, 29 (2): 427-437. |
| [1] | Xiao-guang ZHOU, Jin-fan ZHAO, Shan JIANG, Guang-ming CAO. Flow Stress Model for V-N Microalloyed Steel Under Multi-pass Deformation Conditions [J]. Journal of Northeastern University(Natural Science), 2025, 46(2): 35-41. |
| [2] | Zhong LUO, Jiang ZHAO, Chun-yang XU, Hang CAO. Dynamic Characteristics of Adjustable Vector Nozzles Considering Joint Clearance [J]. Journal of Northeastern University(Natural Science), 2025, 46(1): 61-67. |
| [3] | Fang-ming LIU, Wei SUN. Dynamic Modeling and Stress Reduction Optimization of Series Pipelines Based on Pipe-Solid Element Coupling [J]. Journal of Northeastern University(Natural Science), 2024, 45(9): 1277-1286. |
| [4] | Xiao-peng LI, Jia-xing FU, Hai-long LIU, Meng YIN. RBF Neural Network Compensation Sliding Mode Control Strategy for Flexible Space Manipulators [J]. Journal of Northeastern University(Natural Science), 2024, 45(9): 1258-1267. |
| [5] | Quan SHAN, Shun ZHANG, Jian-cong HUANG, Yan CHEN. Research on Fuzzy Adaptive Interactive Control of Upper Limb Rehabilitation Robots [J]. Journal of Northeastern University(Natural Science), 2024, 45(7): 974-983. |
| [6] | LI Jie, JIA Chang-wang, QIAO Bin, LIU Jia-yong. Genetic Algorithm for Solving Nonlinear Equilibrium Points of Automobile Steering and Its Improvement [J]. Journal of Northeastern University(Natural Science), 2023, 44(12): 1726-1733. |
| [7] | LI Xiao-peng, LI Kai, FAN Xing, ZHANG Ling-yue. Analysis on the Walking Ability of Dual-arm Inspection Robots Along Catenary Lines with Posture Changes [J]. Journal of Northeastern University(Natural Science), 2022, 43(6): 872-880. |
| [8] | DING Shan, ZANG Shi-yi, CAO Dian-ming, SHE Li-huang. Security Scheduling Algorithm of CAN Bus Based on Dynamic ID Hopping [J]. Journal of Northeastern University(Natural Science), 2022, 43(3): 350-358. |
| [9] | HU Jiao, HU Niao-qing, SHEN Jian, LUO Peng. Fault Dynamic Modeling and Simulation for Typical Components of Helicopter Main Reducers [J]. Journal of Northeastern University(Natural Science), 2022, 43(12): 1732-1740. |
| [10] | YE Cui-li, WANG Na, PANG Shuo, YAN Hang. Blade Power Consumption Optimization of Straw Crushing Machines Using the Improved Genetic Algorithm [J]. Journal of Northeastern University(Natural Science), 2021, 42(9): 1290-1298. |
| [11] | DING Shan, BAO Lin-hui, GAO Meng-ning, SHE Li-huang. A Security-based CAN-FD Signal Packing Method [J]. Journal of Northeastern University(Natural Science), 2021, 42(6): 775-781. |
| [12] | LIU Jun, YANG Qing-wen, WANG Jin-tao, LIU Hua-wei. Spatial Information Network Restoration Strategy Based on Improved Genetic Algorithm [J]. Journal of Northeastern University(Natural Science), 2021, 42(4): 524-530. |
| [13] | PEI Yu-long, YANG Shi-jun, PAN Heng-yan. Optimization of Buses’ Flexible Departure Intervals Considering Crowdedness State [J]. Journal of Northeastern University(Natural Science), 2021, 42(11): 1663-1672. |
| [14] | LI Zhuang-nian, CHU Man-sheng, LIU Zheng-gen, LI Bao-feng. Prediction and Optimization of Blast Furnace Parameters Based on Machine Learning and Genetic Algorithm [J]. Journal of Northeastern University Natural Science, 2020, 41(9): 1262-1267. |
| [15] | HUANG Chuan, HU Ping, LIAN Jing. A Big Data Method to Rebuild 3D Road Map Based on Vehicle Data [J]. Journal of Northeastern University Natural Science, 2020, 41(6): 771-777. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||