东北大学学报(自然科学版) ›› 2025, Vol. 46 ›› Issue (4): 52-60.DOI: 10.12068/j.issn.1005-3026.2025.20230294
李小彭1, 刘海龙1, 樊星1, 石冰2
收稿日期:2023-10-23
出版日期:2025-04-15
发布日期:2025-07-01
作者简介:李小彭(1976—),男,江西宁都人,东北大学教授,博士生导师.
基金资助:Xiao-peng LI1, Hai-long LIU1, Xing FAN1, Bing SHI2
Received:2023-10-23
Online:2025-04-15
Published:2025-07-01
摘要:
影响机器人越障性能的主要因素之一是行走臂基座旋转关节.为了提升机器人在越障工况下的行走性能,提出了一种基座旋转关节主动调节方法.首先建立了机器人基座旋转关节的双惯量动力学模型,基于该模型采用线性二次调节器(linear quadratic regulator,LQR)控制理论设计了关节控制器.对比发现基座旋转关节性能主要由权系数矩阵 Qc与 Rc决定,使用遗传算法对关节控制器系数矩阵中的参数进行优化,并通过对比分析优化效果,找到最佳方案来提升机器人在越障工况下的行走性能.最后进行了多关节双臂巡检机器人的越障实验,结果表明,经优化参数后的关节控制器能更好地控制机器人完成越障任务.
中图分类号:
李小彭, 刘海龙, 樊星, 石冰. 输电线巡检机器人越障工况下基座旋转关节性能分析[J]. 东北大学学报(自然科学版), 2025, 46(4): 52-60.
Xiao-peng LI, Hai-long LIU, Xing FAN, Bing SHI. Performance Analysis of Base Rotational Joint Under Obstacle Crossing Condition for Transmission Line Inspection Robot[J]. Journal of Northeastern University(Natural Science), 2025, 46(4): 52-60.
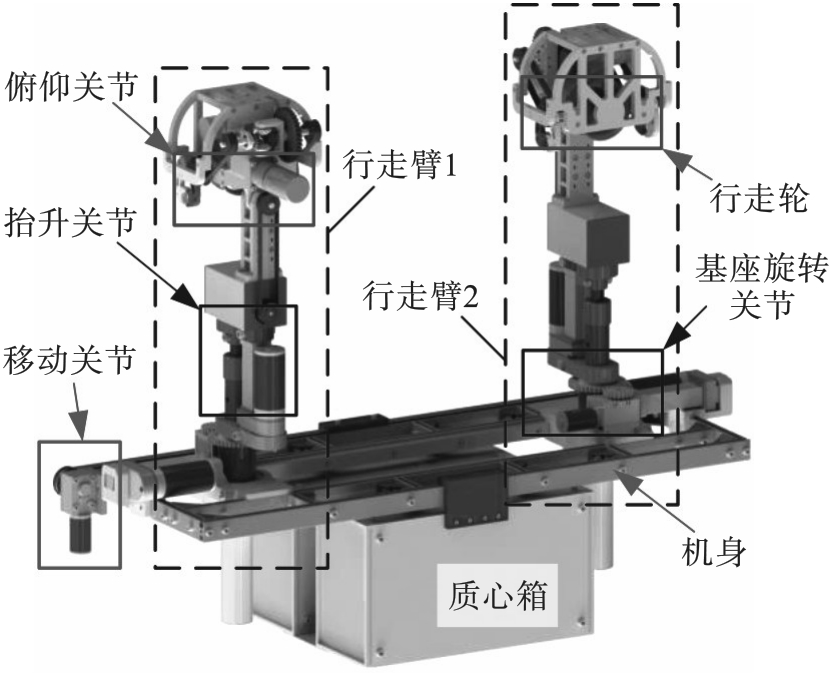
图1 多关节双臂巡检机器人模型
Fig.1 Multi-joint dual-arm inspection robot model
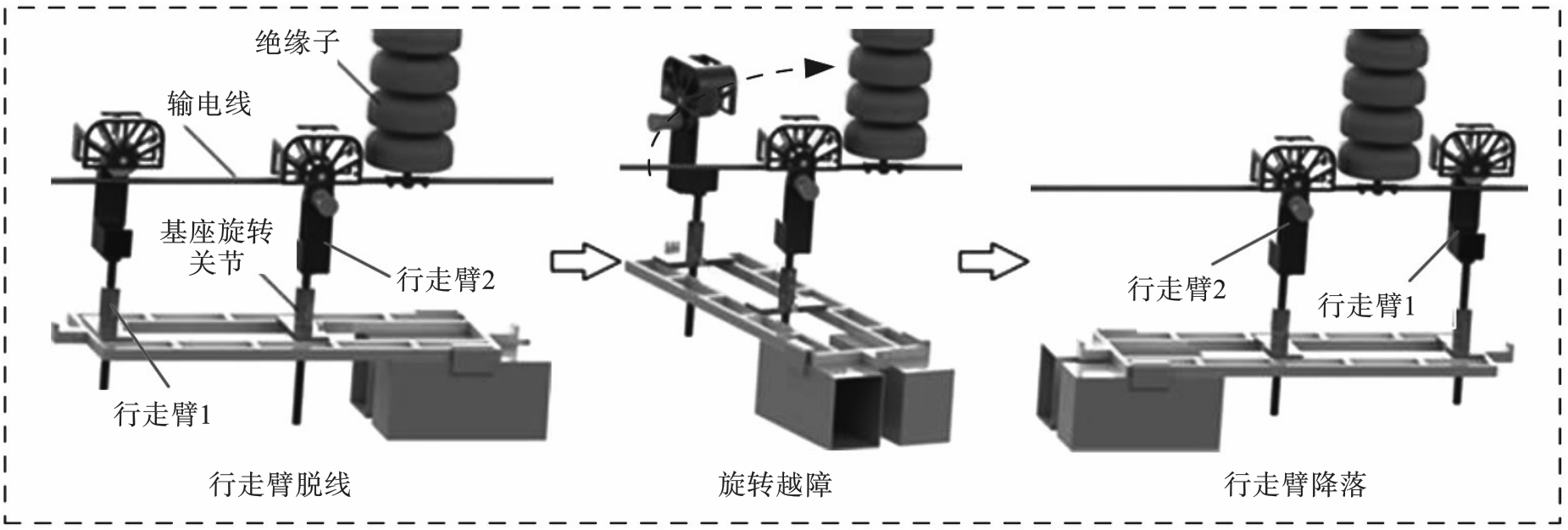
图2 越障过程
Fig.2 Obstacle crossing process
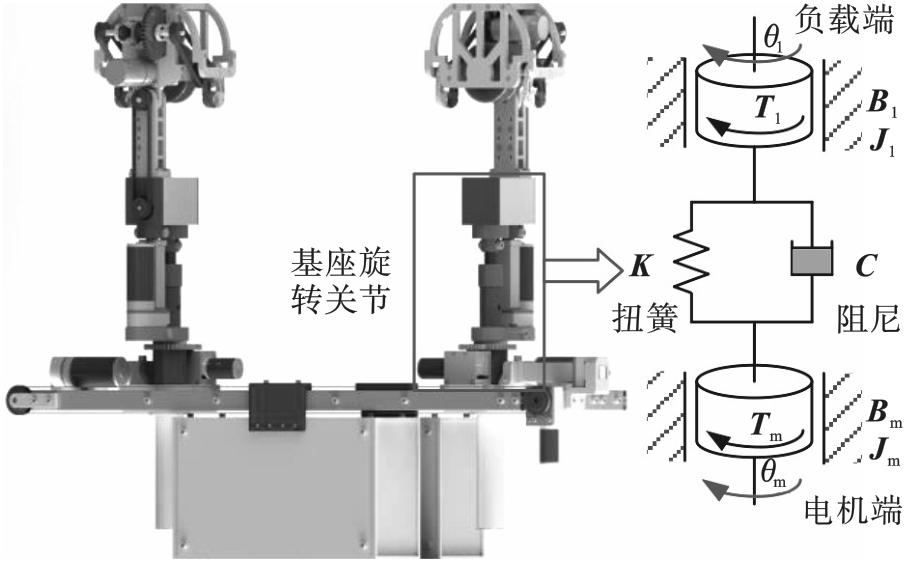
图3 关节简化模型
Fig.3 Model of simplified joint
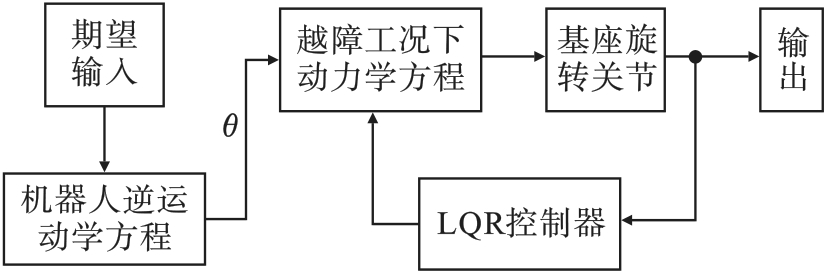
图4 基座旋转关节控制流程图
Fig.4 Control flow chart of the base rotation joint
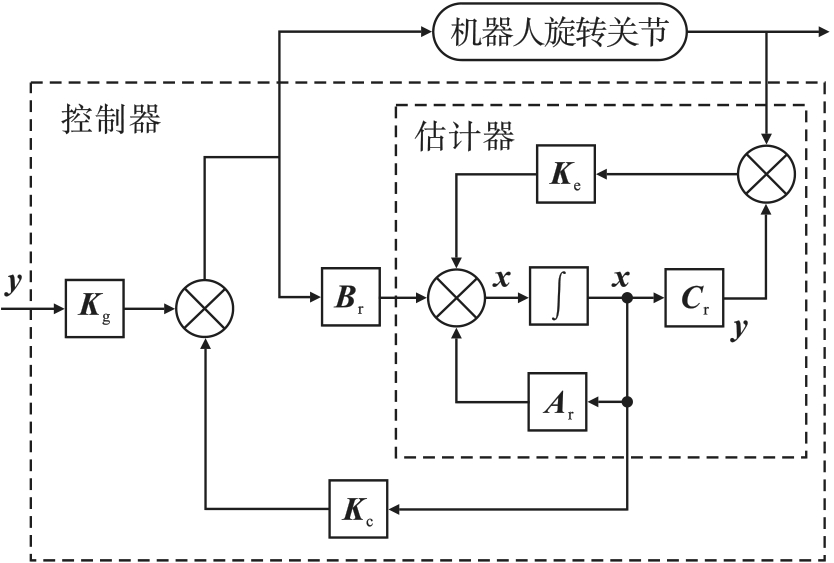
图5 LQR控制器结构
Fig.5 Structure of the LQR controller
| 名称 | 符号 | 单位 | 数值 |
|---|---|---|---|
| 负载转动惯量 | |||
| 负载阻尼系数 | 0.05 | ||
| 传动系统扭转刚度 | K | 1.3 | |
| 传动系统扭转阻尼 | C | 0.05 |
表1 机器人旋转关节参数
Table 1 Parameters of the robot rotation joint
| 名称 | 符号 | 单位 | 数值 |
|---|---|---|---|
| 负载转动惯量 | |||
| 负载阻尼系数 | 0.05 | ||
| 传动系统扭转刚度 | K | 1.3 | |
| 传动系统扭转阻尼 | C | 0.05 |
| 序号 | |||
|---|---|---|---|
| 1 | 100 | 0.1 | 0.1 |
| 2 | 50 | 1 | 1 |
| 3 | 100 | 1 | 50 |
| 4 | 100 | 0.1 | 100 |
表2 Qc与Rc赋值参数
Table 2 Parameters of Qc and Rc
| 序号 | |||
|---|---|---|---|
| 1 | 100 | 0.1 | 0.1 |
| 2 | 50 | 1 | 1 |
| 3 | 100 | 1 | 50 |
| 4 | 100 | 0.1 | 100 |
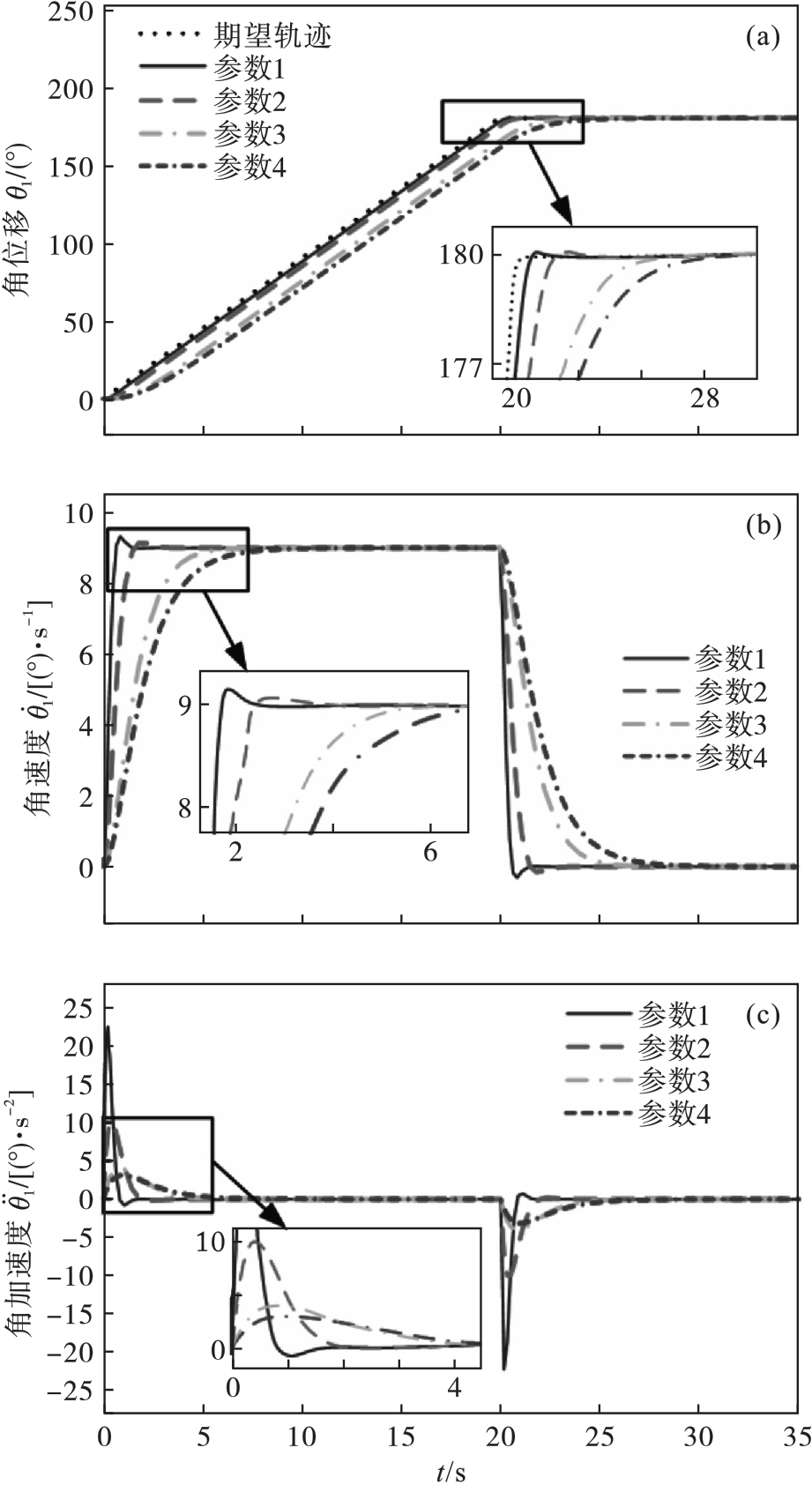
图6 不同参数下旋转关节时域响应对比(a)—角位移; (b)—角速度; (c)—角加速度.
Fig.6 Time domain response comparison of the rotary joint with different parameters
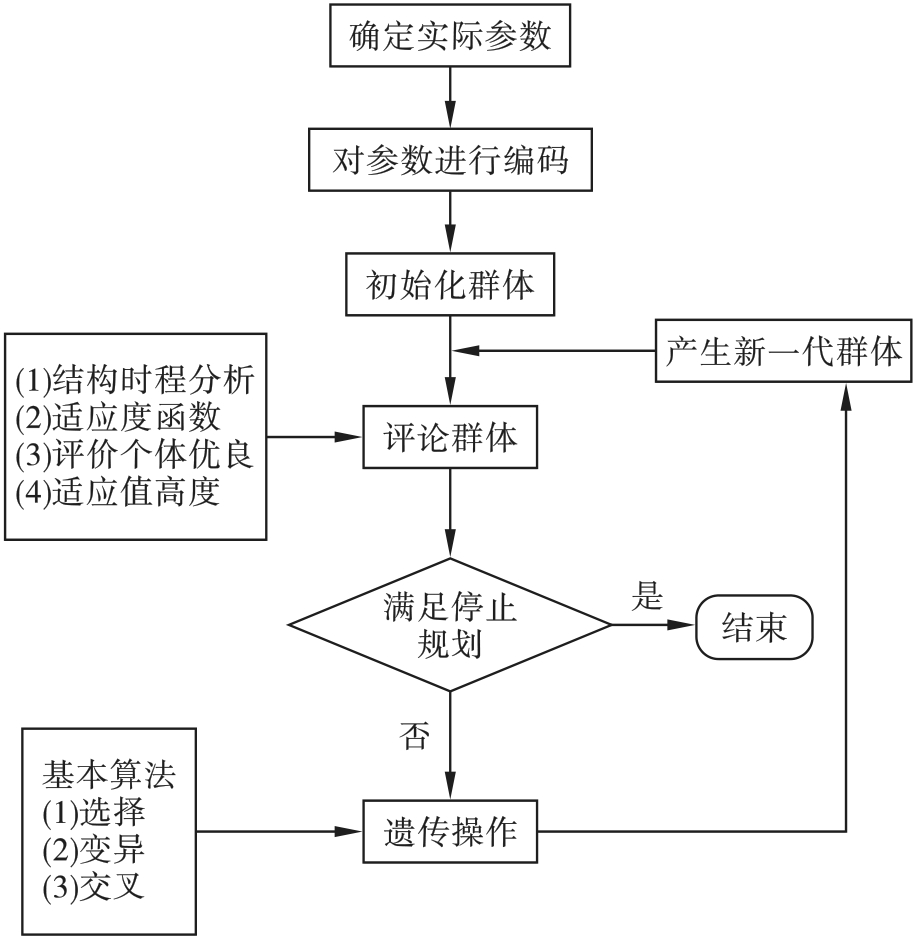
图7 遗传算法优化流程图[18]
Fig.7 Flow chart of optimization based on genetic algorithm[18]
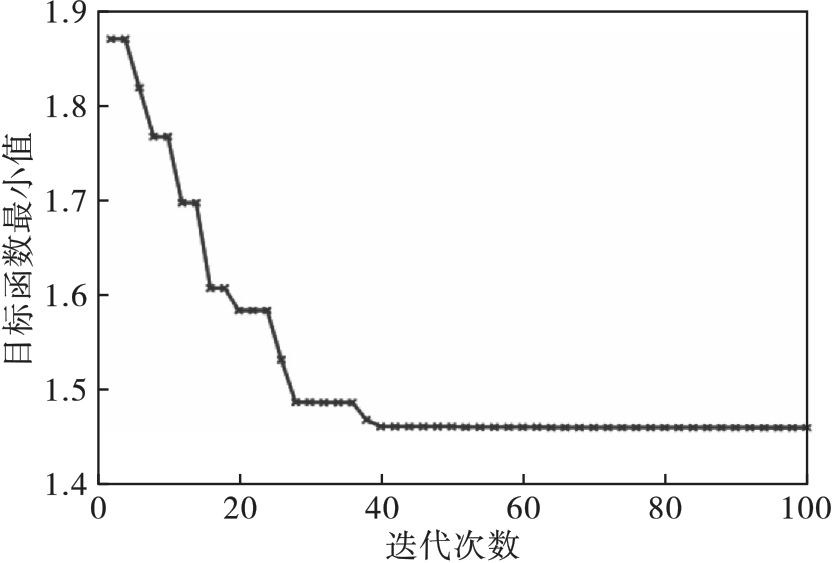
图8 遗传算法进化曲线
Fig.8 Evolutionary curve of GA
| Mp/(°) | Mp/(°) | ||||||
|---|---|---|---|---|---|---|---|
| 10 | 4.524 | 0.090 | 6.437 | 60 | 3.092 | 0.179 | 10.92 |
| 20 | 3.668 | 0.127 | 8.050 | 70 | 3.035 | 0.176 | 11.41 |
| 30 | 3.537 | 0.167 | 9.036 | 80 | 2.932 | 0.177 | 11.79 |
| 40 | 3.456 | 0.173 | 9.769 | 90 | 2.830 | 0.178 | 12.22 |
| 50 | 2.770 | 0.165 | 10.39 | 100 | 2.696 | 0.181 | 12.53 |
表3 不同η1仿真结果
Table 3 Simulation results with different η1
| Mp/(°) | Mp/(°) | ||||||
|---|---|---|---|---|---|---|---|
| 10 | 4.524 | 0.090 | 6.437 | 60 | 3.092 | 0.179 | 10.92 |
| 20 | 3.668 | 0.127 | 8.050 | 70 | 3.035 | 0.176 | 11.41 |
| 30 | 3.537 | 0.167 | 9.036 | 80 | 2.932 | 0.177 | 11.79 |
| 40 | 3.456 | 0.173 | 9.769 | 90 | 2.830 | 0.178 | 12.22 |
| 50 | 2.770 | 0.165 | 10.39 | 100 | 2.696 | 0.181 | 12.53 |
| Mp/(°) | Mp/(°) | ||||||
|---|---|---|---|---|---|---|---|
| 0.01 | 2.770 | 0.165 | 10.39 | 0.5 | 3.234 | 0.158 | 10.30 |
| 0.1 | 3.035 | 0.202 | 10.38 | 0.6 | 3.184 | 0.154 | 10.30 |
| 0.2 | 3.037 | 0.197 | 10.36 | 0.7 | 3.316 | 0.149 | 10.29 |
| 0.3 | 2.747 | 0.155 | 10.34 | 0.8 | 3.254 | 0.146 | 10.27 |
| 0.4 | 3.309 | 0.161 | 10.32 | 0.9 | 3.203 | 0.141 | 10.24 |
表4 不同η2仿真结果
Table 4 Simulation results with different η2
| Mp/(°) | Mp/(°) | ||||||
|---|---|---|---|---|---|---|---|
| 0.01 | 2.770 | 0.165 | 10.39 | 0.5 | 3.234 | 0.158 | 10.30 |
| 0.1 | 3.035 | 0.202 | 10.38 | 0.6 | 3.184 | 0.154 | 10.30 |
| 0.2 | 3.037 | 0.197 | 10.36 | 0.7 | 3.316 | 0.149 | 10.29 |
| 0.3 | 2.747 | 0.155 | 10.34 | 0.8 | 3.254 | 0.146 | 10.27 |
| 0.4 | 3.309 | 0.161 | 10.32 | 0.9 | 3.203 | 0.141 | 10.24 |
| Mp/(°) | Mp/(°) | ||||||
|---|---|---|---|---|---|---|---|
| 1 | 2.747 | 0.155 | 10.34 | 50 | 11.31 | — | 3.156 |
| 10 | 5.487 | 0.034 | 5.317 | 60 | 12.98 | — | 2.961 |
| 20 | 5.826 | — | 4.302 | 70 | 14.62 | — | 2.807 |
| 30 | 8.095 | — | 3.761 | 80 | 15.45 | — | 2.679 |
| 40 | 10.11 | — | 3.404 | 90 | 16.28 | — | 2.569 |
表5 不同ξ仿真结果
Table 5 Simulation results with different ξ
| Mp/(°) | Mp/(°) | ||||||
|---|---|---|---|---|---|---|---|
| 1 | 2.747 | 0.155 | 10.34 | 50 | 11.31 | — | 3.156 |
| 10 | 5.487 | 0.034 | 5.317 | 60 | 12.98 | — | 2.961 |
| 20 | 5.826 | — | 4.302 | 70 | 14.62 | — | 2.807 |
| 30 | 8.095 | — | 3.761 | 80 | 15.45 | — | 2.679 |
| 40 | 10.11 | — | 3.404 | 90 | 16.28 | — | 2.569 |
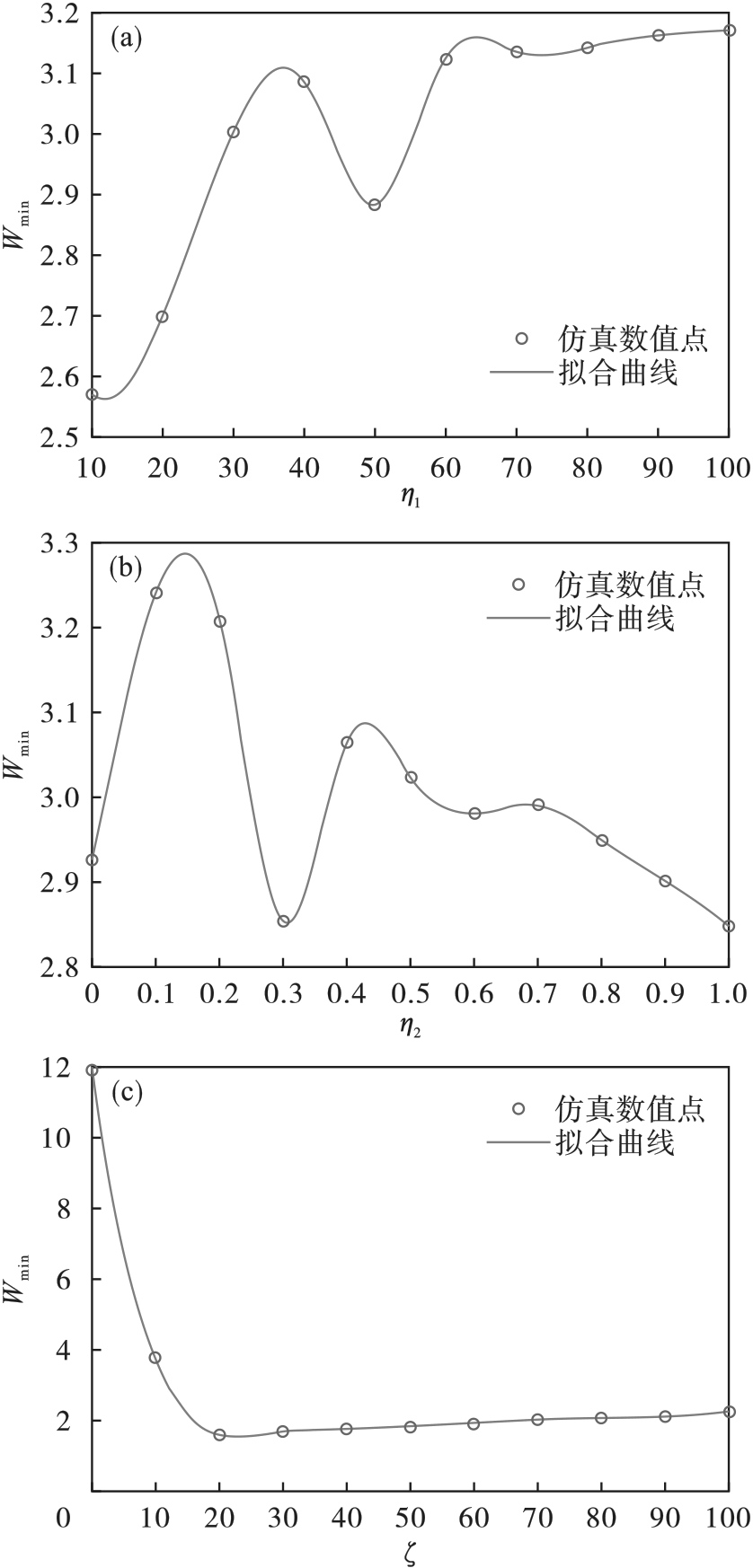
图9 权系数矩阵参数对目标函数影响曲线
Fig.9 Influence curve of weight coefficient matrix parameters on the objective function
| 性能指标 | |||||
|---|---|---|---|---|---|
| (°) | |||||
| GA-LQR | 4.169 3 | 5.543 5 | 5.769 3 | 0.010 9 | 4.778 2 |
表6 参数优化后性能指标 (optimization)
Table 6 Performance index after parameter
| 性能指标 | |||||
|---|---|---|---|---|---|
| (°) | |||||
| GA-LQR | 4.169 3 | 5.543 5 | 5.769 3 | 0.010 9 | 4.778 2 |
| 性能指标 | 参数1 | 参数2 | 参数3 | 参数4 | |
|---|---|---|---|---|---|
| 合计 | 33.35 | 32.38 | 9.493 | 9.732 | |
| -88.10 | -73.31 | 57.56 | 65.76 | ||
| -59.16 | -37.23 | 26.54 | 50.25 | ||
| -62.68 | -32.16 | 21.85 | 43.99 | ||
| 91.20 | 92.04 | — | — | ||
| 78.82 | 52.67 | -16.33 | -33.87 | ||
表7 性能指标对比 (%)
Table 7 Performance index comparison
| 性能指标 | 参数1 | 参数2 | 参数3 | 参数4 | |
|---|---|---|---|---|---|
| 合计 | 33.35 | 32.38 | 9.493 | 9.732 | |
| -88.10 | -73.31 | 57.56 | 65.76 | ||
| -59.16 | -37.23 | 26.54 | 50.25 | ||
| -62.68 | -32.16 | 21.85 | 43.99 | ||
| 91.20 | 92.04 | — | — | ||
| 78.82 | 52.67 | -16.33 | -33.87 | ||
| 越障阶段 | 运行关节 | 运行 时间/s | 运行速度 |
|---|---|---|---|
| 后臂抬升 | 后臂抬升关节 | 10 | 5 mm/s |
| 旋转越障 | 前臂基座旋转关节 | 20 | 9 (°)/s |
| 后臂基座旋转关节 | 20 | 9 (°)/s | |
| 后臂下降 | 前臂抬升关节 | 10 | 5 mm/s |
表8 机器人关节运动参数
Table 8 Robot joint motion parameters
| 越障阶段 | 运行关节 | 运行 时间/s | 运行速度 |
|---|---|---|---|
| 后臂抬升 | 后臂抬升关节 | 10 | 5 mm/s |
| 旋转越障 | 前臂基座旋转关节 | 20 | 9 (°)/s |
| 后臂基座旋转关节 | 20 | 9 (°)/s | |
| 后臂下降 | 前臂抬升关节 | 10 | 5 mm/s |
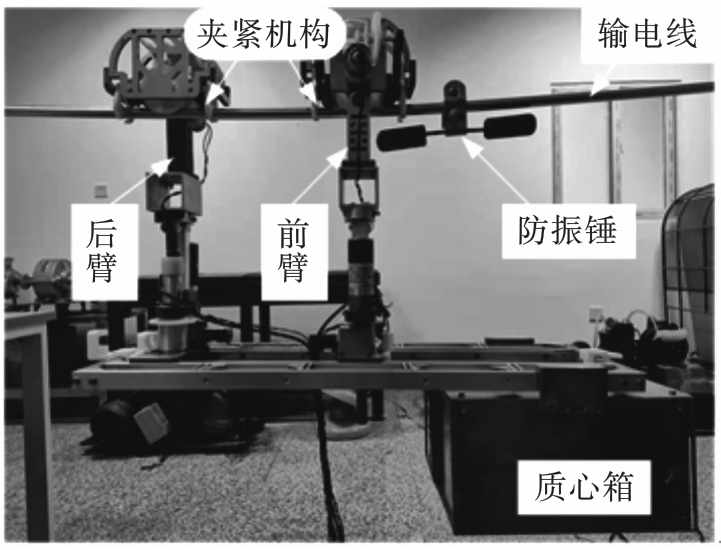
图10 巡检机器人实验样机
Fig.10 Inspection robot test prototype
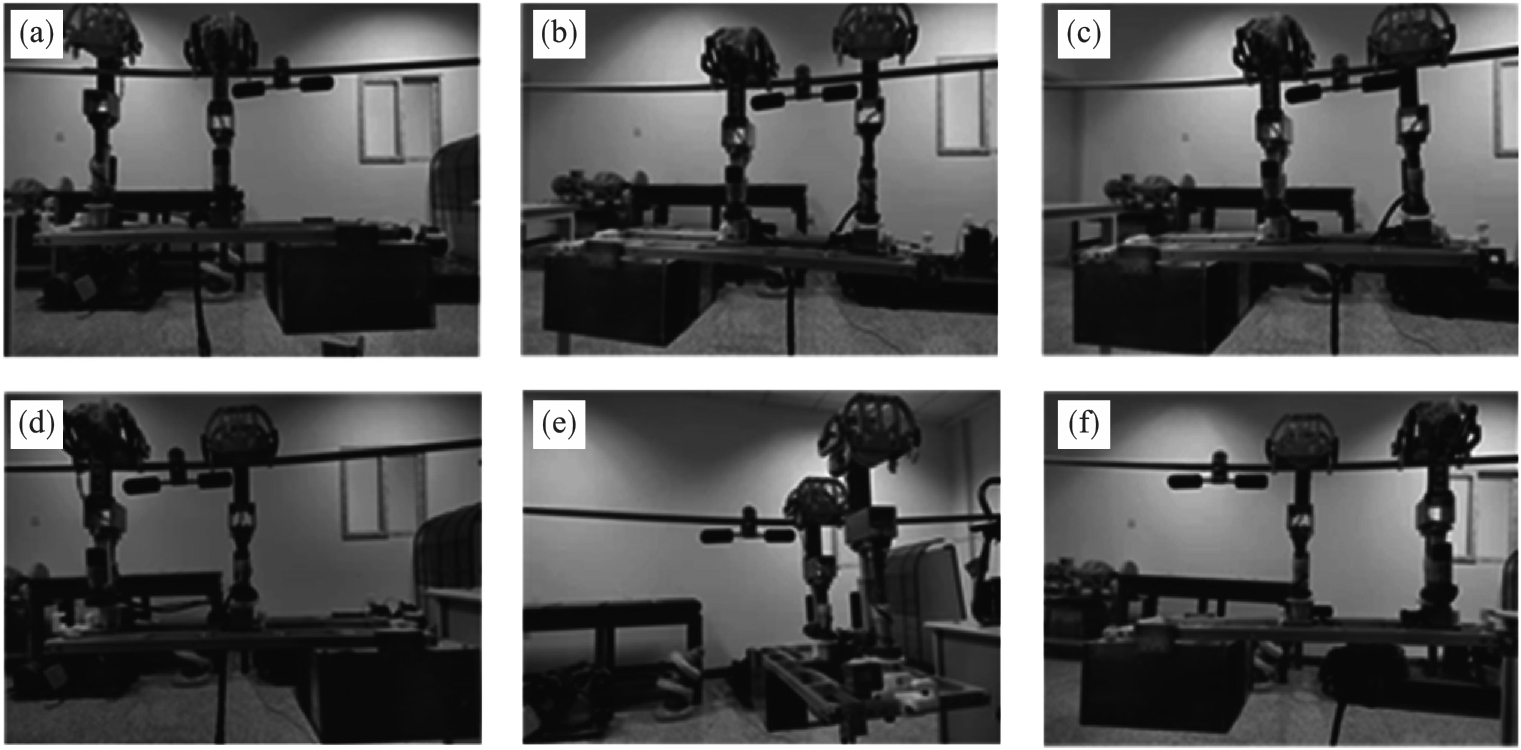
图11 机器人越障测试(a)—后臂抬升脱线; (b)—关节旋转后臂越障; (c)—后臂越障停止;(d)—前臂抬升脱线;(e)—关节旋转前臂越障; (f)—前臂越障停止.
Fig.11 Obstacle crossing test for robot
| 性能指标 | GA-LQR | 参数1 | 参数2 | 参数3 | |
|---|---|---|---|---|---|
| 4.364 | 1.762 | 1.638 | 9.363 | ||
| 4.765 | 2.635 | 3.396 | 8.254 | ||
| 5.532 | 2.461 | 3.762 | 8.469 | ||
| 0.010 | 0.124 | 0.145 | — | ||
| 3.297 | 19.706 | 8.687 | 3.746 | ||
| 整体对比提升/% | — | 31.87 | 29.53 | 24.36 | |
表9 不同控制器参数的实验结果
Table 9 Experimental results for different controller parameters
| 性能指标 | GA-LQR | 参数1 | 参数2 | 参数3 | |
|---|---|---|---|---|---|
| 4.364 | 1.762 | 1.638 | 9.363 | ||
| 4.765 | 2.635 | 3.396 | 8.254 | ||
| 5.532 | 2.461 | 3.762 | 8.469 | ||
| 0.010 | 0.124 | 0.145 | — | ||
| 3.297 | 19.706 | 8.687 | 3.746 | ||
| 整体对比提升/% | — | 31.87 | 29.53 | 24.36 | |
| 1 | 王志轩. 新中国电气化发展七十年[J]. 中国能源, 2019, 41(10): 9-17. |
| Wang Zhi-xuan. Electrification development in 70 years[J]. Energy of China, 2019, 41(10): 9-17. | |
| 2 | Seok K H, Kim Y S. A state of the art of power transmission line maintenance robots[J]. Journal of Electrical Engineering and Technology, 2016, 11(5): 1412-1422. |
| 3 | 周军. 超高压输电线路运行维护安全管理的问题与应对策略[J]. 中外企业家, 2019(36): 111. |
| Zhou Jun. Problems and countermeasures of operation and maintenance safety management of EHV transmission lines[J]. Chinese & Foreign Entrepreneurs, 2019(36): 111. | |
| 4 | Sawada J, Ishikawa Y, Kobayashi Y, et al. Apparatus for tracking an overhead line and automatically moving around obstacles on the line: US5103739[P]. 1992-04-14. |
| 5 | Montambault S, Pouliot N. Design and validation of a mobile robot for power line inspection and maintenance[M]//Field and Service Robotics. Heidelberg: Springer, 2008: 495-504. |
| 6 | Kobayashi H, Nakamura H, Shimada T. An inspection robot for feeder cables—basic structure and control[C]//Proceedings IECON '91: International Conference on Industrial Electronics, Control and Instrumentation. Kobe, 1991: 992-995. |
| 7 | Pouliot N, Montambault S. LineScout technology: from inspection to robotic maintenance on live transmission power lines[C]//2009 IEEE International Conference on Robotics and Automation. Kobe, 2009: 1034-1040. |
| 8 | Alhassan A B, Zhang X D, Shen H M, et al. Power transmission line inspection robots: a review, trends and challenges for future research[J]. International Journal of Electrical Power & Energy Systems, 2020, 118: 105862. |
| 9 | Jia Y H, Hu Q, Xu S J. Dynamics and adaptive control of a dual-arm space robot with closed-loop constraints and uncertain inertial parameters[J]. Acta Mechanica Sinica, 2014, 30(1): 112-124. |
| 10 | Jamisola R S, Kormushev P S, Roberts R G, et al. Task-space modular dynamics for dual-arms expressed through a relative Jacobian[J]. Journal of Intelligent & Robotic Systems, 2016, 83(2): 205-218. |
| 11 | 李小彭, 尚东阳, 李凡杰, 等. 输电线巡检机器人动力学建模与DME评价[J]. 东北大学学报(自然科学版), 2020, 41(9): 1280-1284. |
| Li Xiao-peng, Shang Dong-yang, Li Fan-jie, et al. Dynamic modeling and DME evaluation of power transmission line inspection robots[J]. Journal of Northeastern University (Natural Science), 2020, 41(9): 1280-1284. | |
| 12 | Spong M W, Hutchinson S, Vidyasagar M. Robot modeling and control[J]. Industrial Robot International Journal, 2006, 17(5): 709-737. |
| 13 | Li X P, Fan X, Shang D Y, et al. Dynamic performance analysis based on the mechatronic system of power transmission line inspection robot with dual-arm[J]. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, 2023, 237(22): 5391-5408. |
| 14 | Chen M. Disturbance attenuation tracking control for wheeled mobile robots with skidding and slipping[J]. IEEE Transactions on Industrial Electronics, 2017, 64(4): 3359-3368. |
| 15 | 李小彭, 尚东阳, 李凡杰, 等. 输电线巡检机器人位姿变化的柔性关节控制策略[J]. 东北大学学报(自然科学版), 2020, 41(11): 1577-1583. |
| Li Xiao-peng, Shang Dong-yang, Li Fan-jie, et al. Flexible joint control strategy based on posture change of transmission line inspection robots[J]. Journal of Northeastern University (Natural Science), 2020, 41(11): 1577-1583. | |
| 16 | 武凌宇, 王晓东, 吴建德. 基于蚁群算法的机器人系统LQR最优控制研究[J]. 传感器与微系统, 2018, 37(1): 56-59. |
| Wu Ling-yu, Wang Xiao-dong, Wu Jian-de. Research on LQR optimal control of robot based on ant colony algorithm[J]. Transducer and Microsystem Technologies, 2018, 37(1): 56-59. | |
| 17 | Zhang S, Hao Y S, Wang M, et al. Multichannel Hankel matrix completion through nonconvex optimization[J]. IEEE Journal of Selected Topics in Signal Processing, 2018, 12(4): 617-632. |
| 18 | 侯仰强, 王天琪, 岳建锋, 等. 基于多目标遗传算法的双机器人协调焊接路径规划[J]. 中国机械工程, 2018, 29(16): 1984-1989. |
| Hou Yang-qiang, Wang Tian-qi, Yue Jian-feng, et al. Path planning for dual-robot coordinate welding based on multi-objective genetic algorithm[J]. China Mechanical Engineering, 2018, 29(16): 1984-1989. | |
| 19 | Afzalirad M, Shafipour M. Design of an efficient genetic algorithm for resource-constrained unrelated parallel machine scheduling problem with machine eligibility restrictions[J]. Journal of Intelligent Manufacturing, 2018, 29 (2): 427-437. |
| [1] | 周晓光, 赵金帆, 姜珊, 曹光明. 多道次变形条件下V-N微合金钢的流变应力模型[J]. 东北大学学报(自然科学版), 2025, 46(2): 35-41. |
| [2] | 赵英博, 修世超, 洪远, 步新宇. 户外型AGV越障仿真方法与实验研究[J]. 东北大学学报(自然科学版), 2024, 45(8): 1107-1114. |
| [3] | 单泉, 张顺, 黄建聪, 陈砚. 上肢康复机器人模糊自适应交互控制研究[J]. 东北大学学报(自然科学版), 2024, 45(7): 974-983. |
| [4] | 李杰, 贾长旺, 乔斌, 刘佳勇. 汽车转向非线性平衡点遗传算法求解及其改进[J]. 东北大学学报(自然科学版), 2023, 44(12): 1726-1733. |
| [5] | 李小彭, 李凯, 樊星, 张凌越. 双臂巡检机器人位姿变化下沿悬链线行走能力分析[J]. 东北大学学报(自然科学版), 2022, 43(6): 872-880. |
| [6] | 丁山, 臧仕义, 曹殿明, 佘黎煌. 基于动态ID跳变的CAN总线安全调度算法[J]. 东北大学学报(自然科学版), 2022, 43(3): 350-358. |
| [7] | 叶翠丽, 王娜, 庞硕, 闫航. 基于改进遗传算法的秸秆还田机刀片功耗优化[J]. 东北大学学报(自然科学版), 2021, 42(9): 1290-1298. |
| [8] | 丁山, 暴林慧, 高梦宁, 佘黎煌. 一种基于安全性的CAN-FD信号打包方法[J]. 东北大学学报(自然科学版), 2021, 42(6): 775-781. |
| [9] | 刘军, 杨青文, 王金涛, 刘华伟. 基于改进遗传算法的空间信息网恢复策略[J]. 东北大学学报(自然科学版), 2021, 42(4): 524-530. |
| [10] | 裴玉龙, 杨世军, 潘恒彦. 考虑车内拥挤状态的公交弹性发车间隔优化[J]. 东北大学学报(自然科学版), 2021, 42(11): 1663-1672. |
| [11] | 李壮年, 储满生, 柳政根, 李宝峰. 基于机器学习和遗传算法的高炉参数预测与优化[J]. 东北大学学报:自然科学版, 2020, 41(9): 1262-1267. |
| [12] | 黄川, 胡平, 连静. 一种基于车载信号还原机动车道3D地图的大数据方法[J]. 东北大学学报:自然科学版, 2020, 41(6): 771-777. |
| [13] | 刘芳, 刘欣怡, 苏卫星, 林辉. 电动汽车动力电池健康状态在线估算方法[J]. 东北大学学报:自然科学版, 2020, 41(4): 492-498. |
| [14] | 王新刚, 徐馷悉, 李尚杰, 马瑞敏. 不确定结构的区间可靠性优化设计[J]. 东北大学学报:自然科学版, 2020, 41(4): 521-527. |
| [15] | 张华伟, 郑晓涛. 基于遗传算法优化神经网络的拼焊板压边力预测[J]. 东北大学学报:自然科学版, 2020, 41(2): 241-245. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||