Journal of Northeastern University(Natural Science) ›› 2025, Vol. 46 ›› Issue (3): 1-11.DOI: 10.12068/j.issn.1005-3026.2025.20239039
• Information & Control • Next Articles
Yu-long PEI1, Shuang-zhu ZHAI2
Received:2023-08-02
Online:2025-03-15
Published:2025-05-29
CLC Number:
Yu-long PEI, Shuang-zhu ZHAI. Active Obstacle Avoidance Path Planning for Multi-scenario Autonomous Vehicles Under Icy and Snowy Road Conditions[J]. Journal of Northeastern University(Natural Science), 2025, 46(3): 1-11.
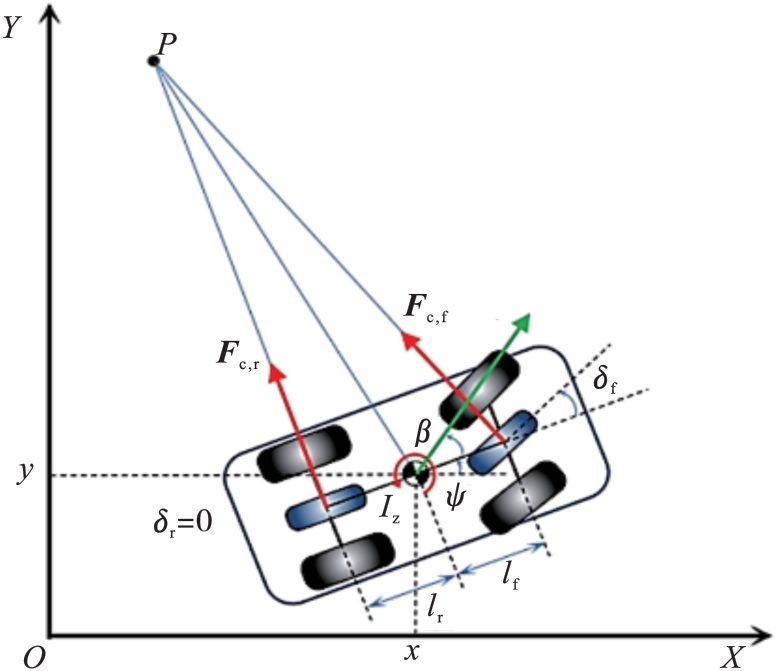
Fig.1 Simplified two-degree of freedom vehicle dynamical model

Fig.2 Input and output variables of magic formula tire model
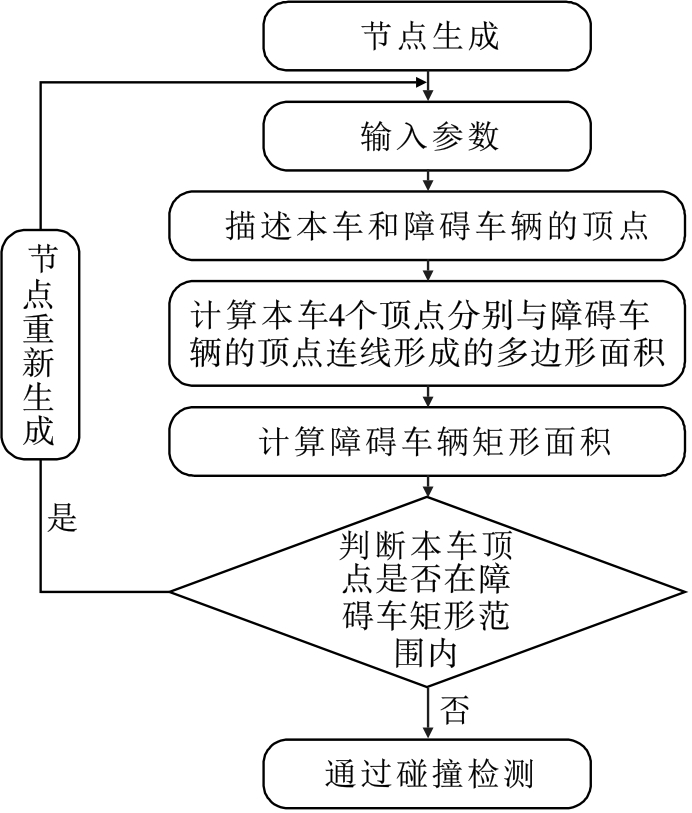
Fig.3 Flow chart of collision detection
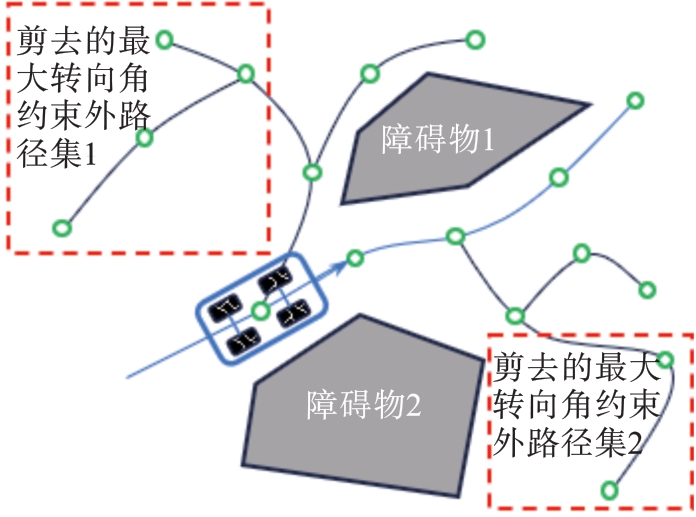
Fig.4 Schematic diagram of the curvature- constrained pruning strategy
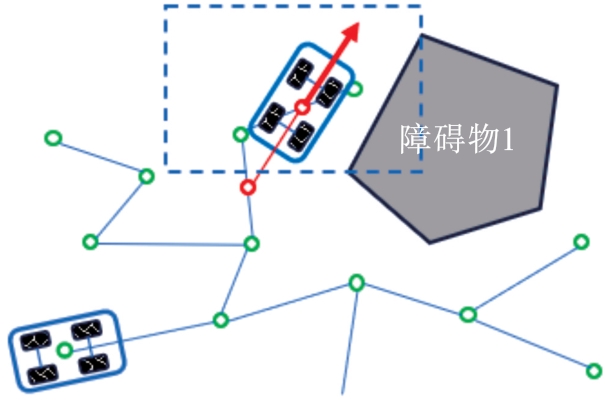
Fig.5 Schematic diagram of the curvature-constrained branching strategy
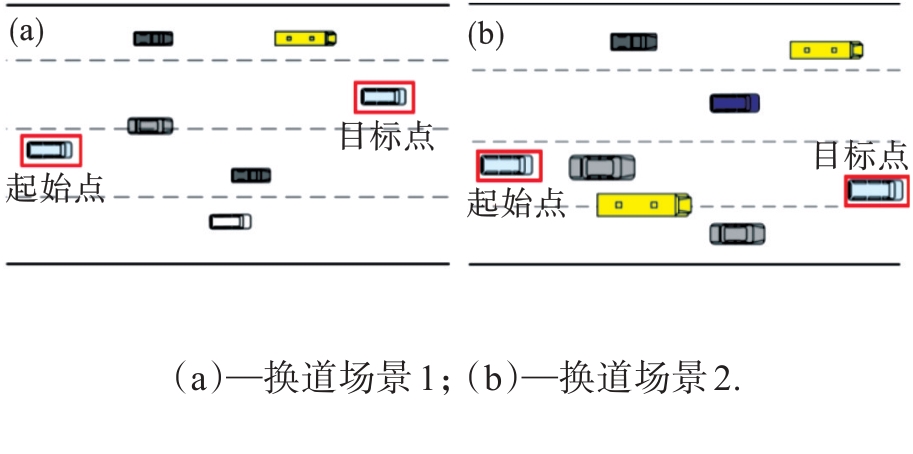
Fig.6 Static lane changing scenario
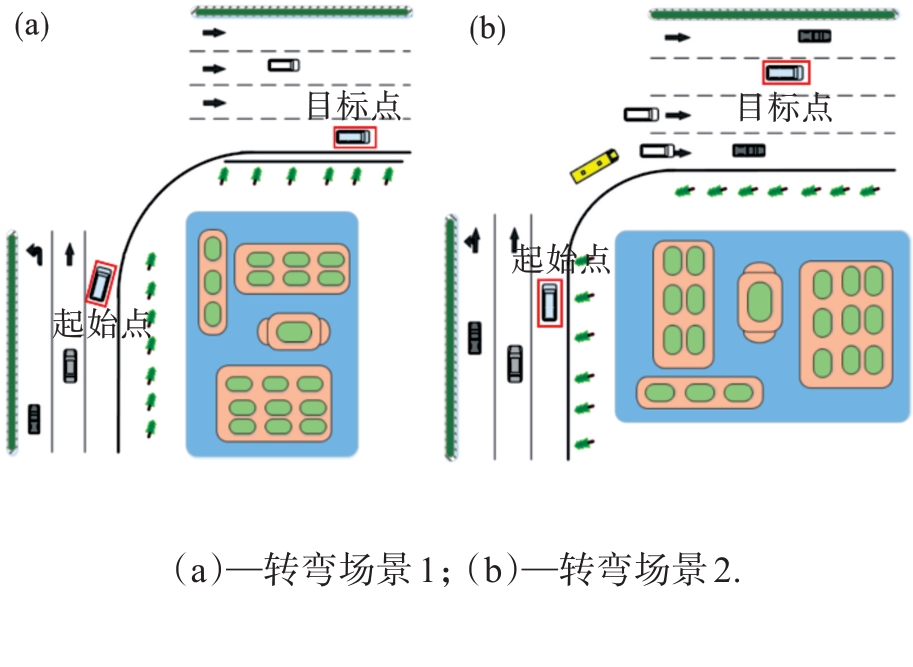
Fig.7 Static turning scenario
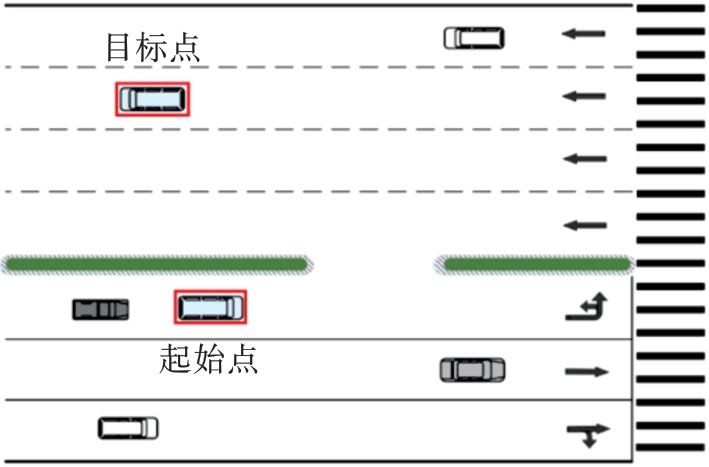
Fig.8 Static U-turn scenario
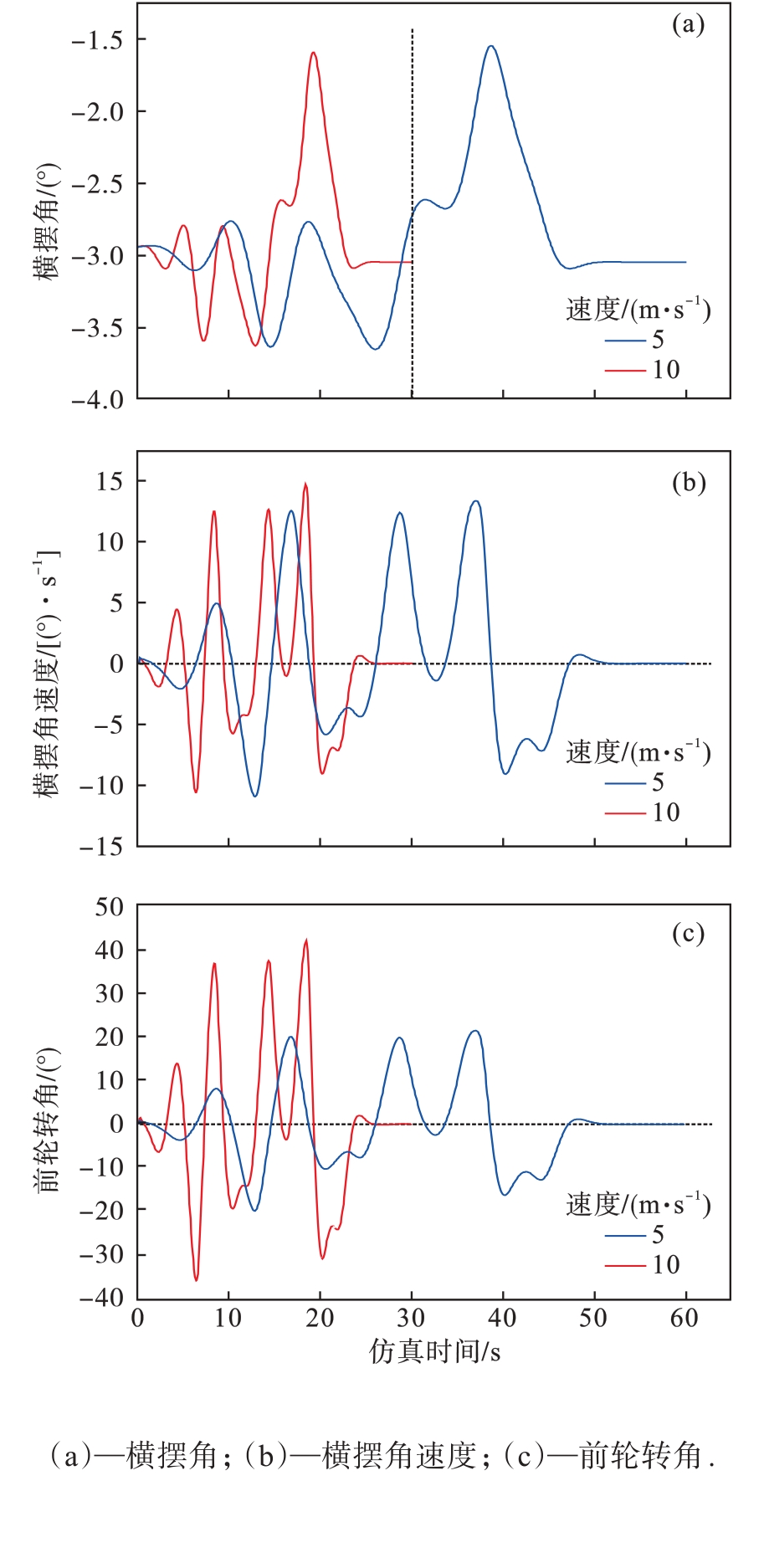
Fig.9 Dynamics simulation parameters of vehicle in lane change scenario 1
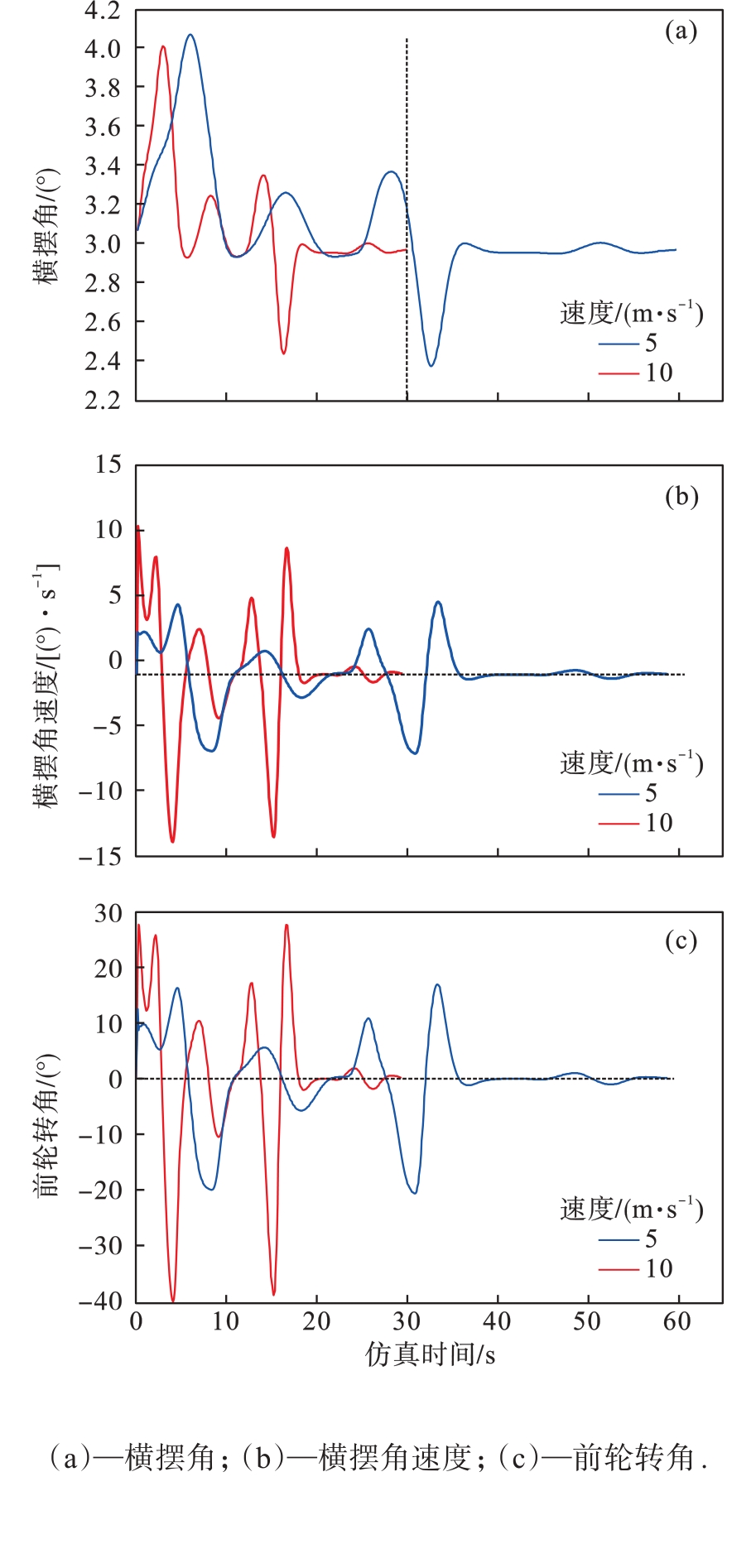
Fig.10 Dynamics simulation parameters of vehicle in lane change scenario 2
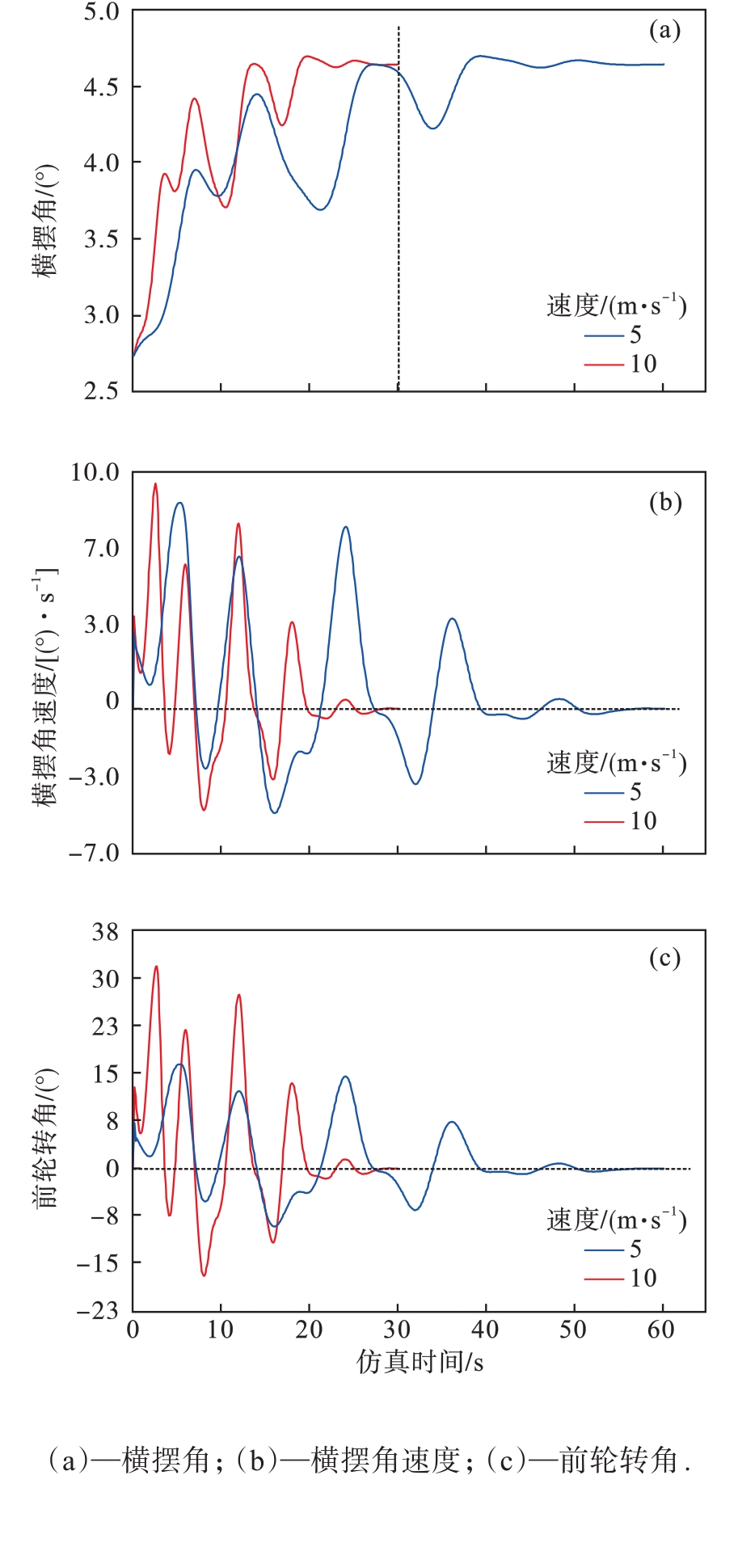
Fig.11 Dynamics simulation parameters of vehicle in turning scenario 1
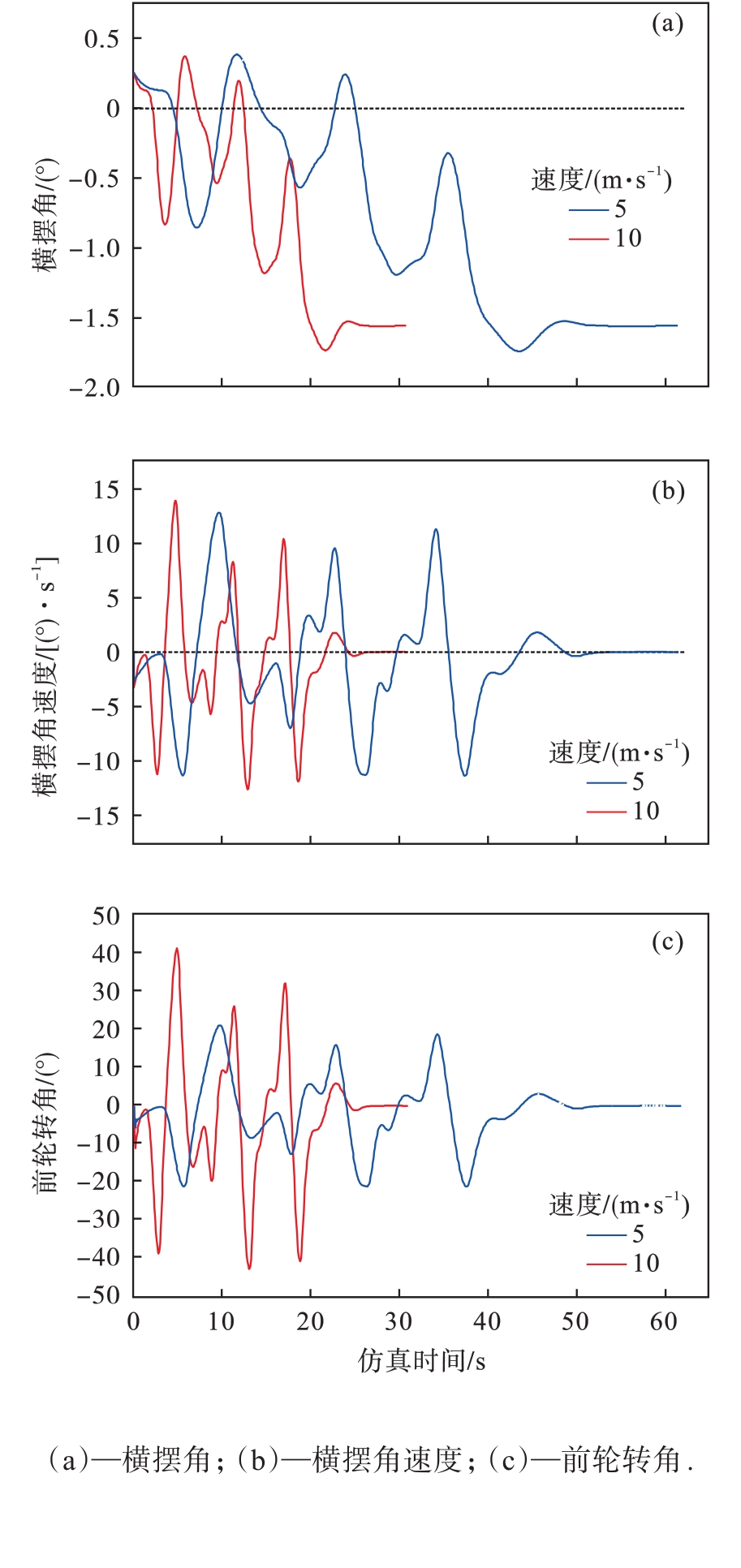
Fig.12 Dynamics simulation parameters of vehicle in turning scenario 2
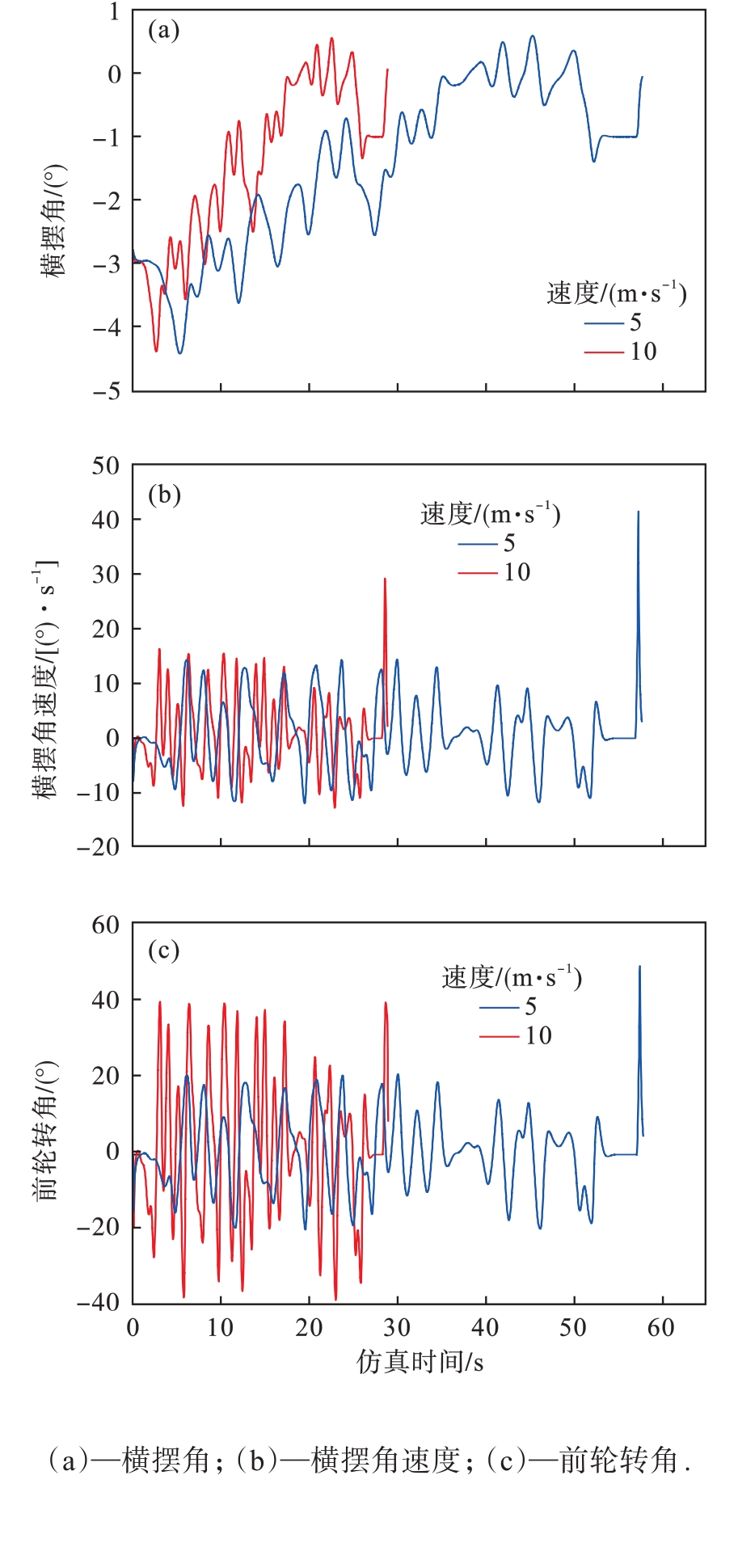
Fig.13 Dynamics simulation parameters of vehicle in U-turn scenario
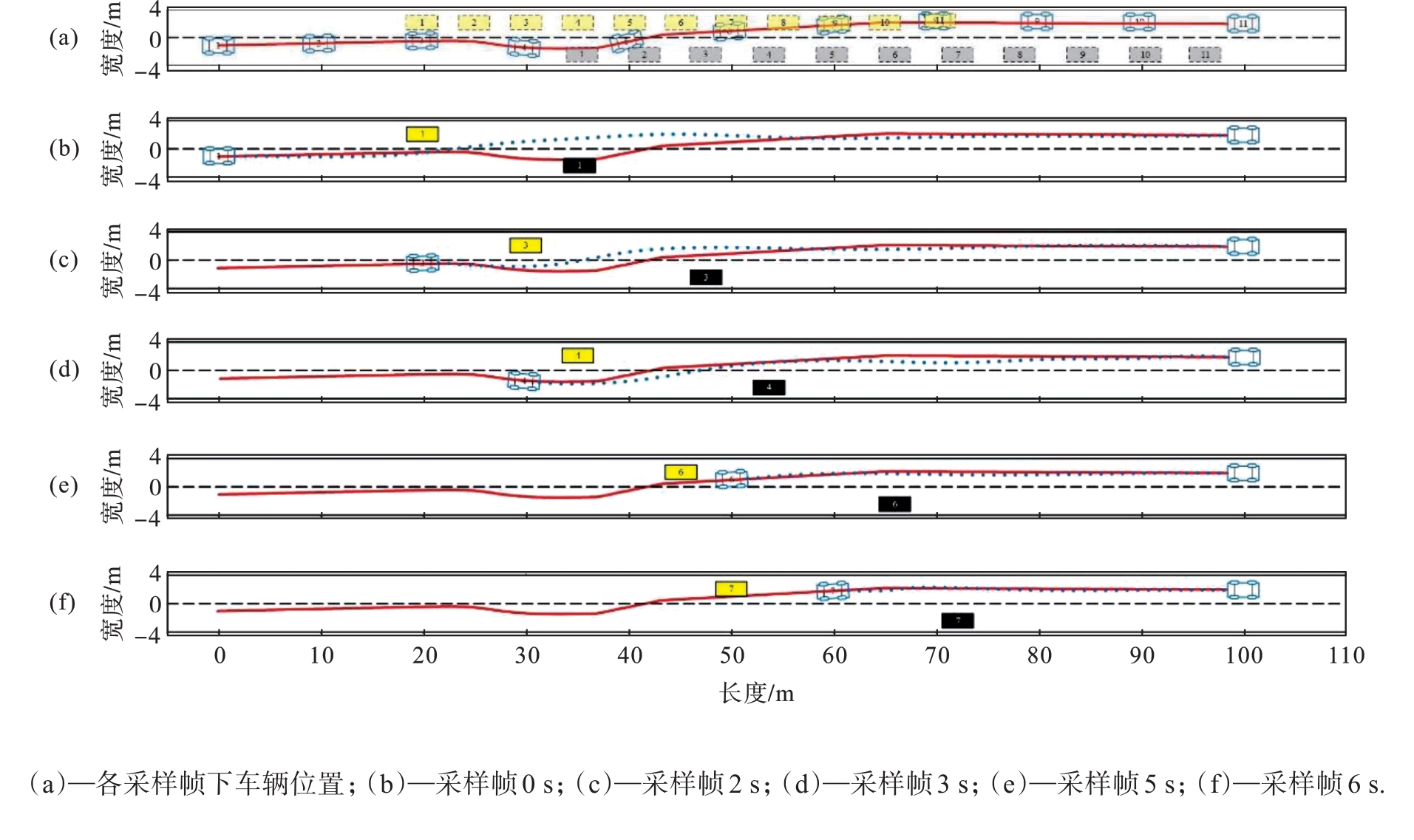
Fig.14 Simulation results of dynamic path planning
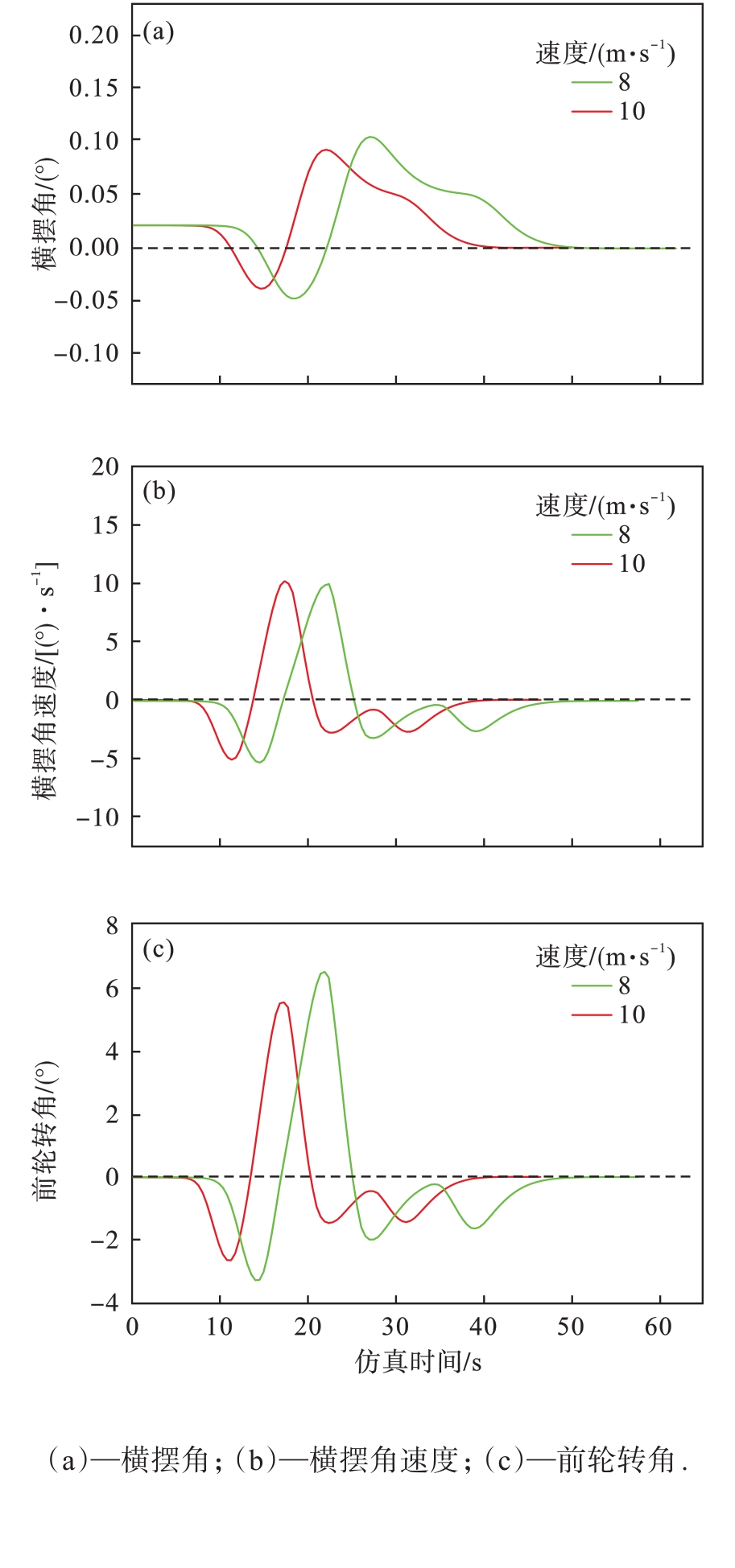
Fig.15 Changes of dynamics simulation parameters of vehicle in a dynamic scenario
| 1 | Dijkstra E W. A note on two problems in connexion with graphs[M]//Edsger Wybe Dijkstra. New York: ACM, 2022. |
| 2 | Hart P E, Nilsson N J, Raphael B. A formal basis for the heuristic determination of minimum cost paths[J]. IEEE Transactions on Systems Science and Cybernetics, 1968, 4(2): 100-107. |
| 3 | Chi W Z, Ding Z Y, Wang J K,et al. A generalized Voronoi diagram-based efficient heuristic path planning method for RRTs in mobile robots[J]. IEEE Transactions on Industrial Electronics, 2022, 69(5): 4926-4937. |
| 4 | Wang J K, Chi W Z, Li C M, et al. Efficient robot motion planning using bidirectional-unidirectional RRT extend function[J]. IEEE Transactions on Automation Science and Engineering, 2022, 19(3): 1859-1868. |
| 5 | Hauser K.Lazy collision checking in asymptotically-optimal motion planning[C]//IEEE International Conference on Robotics and Automation(ICRA). Seattle, 2015: 2951-2957. |
| 6 | Lai T, Morere P, Ramos F, et al. Bayesian local sampling-based planning[J]. IEEE Robotics and Automation Letters, 2020, 5(2): 1954-1961. |
| 7 | Karaman S, Frazzoli E. Sampling-based algorithms for optimal motion planning[J]. The International Journal of Robotics Research, 2011, 30(7): 846-894. |
| 8 | Song Q, Zhao Q L, Wang S X, et al. Dynamic path planning for unmanned vehicles based on fuzzy logic and improved ant colony optimization[J]. IEEE Access, 2020, 8: 62107-62115. |
| 9 | Li R H, Chang Y L, Wang Z C. Study of optimal allocation of water resources in Dujiangyan irrigation district of China based on an improved genetic algorithm[J]. Water Supply, 2021, 21(6): 2989-2999. |
| 10 | 邵琪,时维国.基于改进蚁群算法的机器人路径规划研究[J].现代制造工程,2023(6):46-51. |
| Shao Qi, Shi Wei-guo. Research on robot path planning based on improved ant colony algorithm[J]. Modern Manufacturing Engineering, 2023(6): 46-51. | |
| 11 | Yu Z H, Si Z J, Li X B, et al. A novel hybrid particle swarm optimization algorithm for path planning of UAVs[J]. IEEE Internet of Things Journal, 2022, 9(22): 22547-22558. |
| 12 | La Valle S M, Kuffner J J. Randomized kinodynamic planning[C]// IEEE International Conference on Robotics and Automation. Detroit: 1999: 473-479. |
| 13 | 宋金泽,戴斌,单恩忠,等.一种改进的RRT路径规划算法[J].电子学报,2010,38(2A):225-228. |
| Song Jin-ze, Dai Bin, Shan En-zhong, et al. An improved RRT path planning algorithm[J]. Acta Electronica Sinica, 2010, 38(2A): 225-228. | |
| 14 | Chang X F, Wang Y Z, Yi X D, et al. SARRT: a structure-aware RRT-based approach for 2D path planning[C]//IEEE International Conference on Robotics and Biomimetics. Zhuhai, 2015: 1698-1703. |
| 15 | Kuffner J J, LaValle S M. RRT-connect: an efficient approach to single-query path planning[C]//IEEE International Conference on Robotics and Automation. San Francisco, 2000: 995-1001. |
| 16 | Blanco J L, Bellone M, Gimenez-Fernandez A. TP-space RRT-kinematic path planning of non-holonomic any-shape vehicles[J]. International Journal of Advanced Robotic Systems, 2015, 12(5): 55. |
| 17 | Ghosh D, Nandakumar G, Narayanan K, et al. Kinematic constraints based Bi-directional RRT(KB-RRT) with parameterized trajectories for robot path planning in cluttered environment[C]//2019 International Conference on Robotics and Automation. Montreal. 2019: 8627-8633. |
| 18 | 毛丁丁,邓亚东.四轮转向智能车辆轨迹跟踪及稳定控制研究[J].机械科学与技术,2020,39(7):1094-1099. |
| Mao Ding-ding, Deng Ya-dong. Research on trajectory tracking and stability control of 4WS intelligent vehicle[J]. Mechanical Science and Technology for Aerospace Engineering, 2020, 39(7): 1094-1099. | |
| 19 | Bakker E, Nyborg L, Pacejka H B. Tyre modelling for use in vehicle dynamics studies[J/OL]. SAE Transactions, 1987: 190-204[2022-11-11]. . |
| 20 | 郑香美,高兴旺,赵志忠.基于“魔术公式”的轮胎动力学仿真分析[J].机械与电子,2012,30(9):16-20. |
| Zheng Xiang-mei, Gao Xing-wang, Zhao Zhi-zhong. Simulation analysis of tire dynamic based on “magic formula”[J]. Machinery & Electronics, 2012, 30(9): 16-20. | |
| 21 | 王中阳.冰雪路面下智能车辆自主换道决策规划与控制研究[D]. 淄博:山东理工大学,2020. |
| Wang Zhong-yang. Research on decision planning and control of autonomous lane change of intelligent vehicle on ice snow road[D]. Zibo:Shandong University of Technology, 2020. | |
| 22 | 交通运输部公路局, 中交第一公路勘察设计研究院有限公司. 公路工程技术标准: [S]. 北京: 人民交通出版社,2015. |
| Highway Bureau of Ministry of Transportation and Communications, CCCC First Highway Survey and Design Institute Co. Technical standard for highway engineering: [S]. Beijing: People’s Transportation Press, 2015. | |
| 23 | Song X G, Fan X, Cao Z Q, et al. A TC-RRT-based path planning algorithm for the nonholonomic mobile robots[C]//Chinese Control Conference. Dalian, 2017: 6638-6643. |
| 24 | Zhou J, Zheng H Y, Wang J M, et al. Multiobjective optimization of lane-changing strategy for intelligent vehicles in complex driving environments[J]. IEEE Transactions on Vehicular Technology, 2019, 69(2): 1291-1308. |
| 25 | 吴彬彬,罗峰.基于RRT*的智能车辆路径规划算法[J].机电一体化,2017,23(10):15-23. |
| Wu Bin-bin, Luo Feng. RRT*-based path planning algorithm for intelligent vehicle[J]. Mechatronics, 2017, 23(10): 15-23. | |
| 26 | 牛国臣,李文帅,魏洪旭.基于双五次多项式的智能汽车换道轨迹规划[J].汽车工程,2021,43(7):978-986,1004. |
| Niu Guo-chen, Li Wen-shuai, Wei Hong-xu. Intelligent vehicle lane changing trajectory planning based on double quintic polynomials[J]. Automotive Engineering, 2021, 43(7): 978-986,1004. | |
| 27 | 龚国铮,郑少武,钟思祺,等.基于预测模型的无人赛车路径规划算法研究[J].汽车技术,2022(7):32-41. |
| Gong Guo-zheng, Zheng Shao-wu, Zhong Si-qi, et al. Research on path planning algorithm of driverless race car based on predictive model[J]. Automobile Technology, 2022(7): 32-41. |
| [1] | Qi-long JIANG, Jian XU. Application of Improved PSO-PH-RRT* Algorithm in Intelligent Vehicle Path Planning [J]. Journal of Northeastern University(Natural Science), 2025, 46(3): 12-19. |
| [2] | Jin-hua XU, Fei WANG, Fei HAN, Yan LI. A Method for Path Planning of Multi-vehicles Collaboration with Multi-agricultural UAVs [J]. Journal of Northeastern University(Natural Science), 2024, 45(2): 296-304. |
| [3] | ZHAO Jun-tao, LUO Xiao-chuan, LIU Jun-mi. Application of Improved Whale Optimization Algorithm in Robot Path Planning [J]. Journal of Northeastern University(Natural Science), 2023, 44(8): 1065-1071. |
| [4] | LIU Xiao-xi, JIANG Hui-yan, LUO Min. Multi-constraint Optimal Puncture Path Planning Algorithm for Liver Cancer Ablation [J]. Journal of Northeastern University(Natural Science), 2023, 44(7): 922-930. |
| [5] | ZHAO Zhao, YUAN Pei-xin, TANG Jun-wen, CHEN Jin-lin. Agent Path Planning Algorithm Based on Improved SNN-HRL [J]. Journal of Northeastern University(Natural Science), 2023, 44(11): 1548-1555. |
| [6] | SUN Xiao-feng, ZHAO Ying, LYU Chun-mei. Influencing Mechanism of Human-Computer Interaction Trust in Autonomous Vehicles [J]. Journal of Northeastern University(Natural Science), 2022, 43(9): 1305-1313. |
| [7] | WANG Hai-fang, CUI Yang-yang, LI Ming-fei, LI Guang-yu. Mobile Robot Path Planning Algorithm Based on Improved RRT*FN [J]. Journal of Northeastern University(Natural Science), 2022, 43(9): 1217-1225. |
| [8] | HUO Yue-ying, GUO Chen, ZHU Yuan, FENG Chen-xi. Use Intention Model of Shared Autonomous Vehicles and Its Impact Factors [J]. Journal of Northeastern University(Natural Science), 2021, 42(7): 1057-1064. |
| [9] | ZHANG Yu, LI Dong-sheng, WANG Zhi-wei, GONG Ya-dong. Shortest Tool Path Generation Method for STEP-NC Complex Pockets Based on Graph Theory and Improved Dijkstra Algorithm [J]. Journal of Northeastern University Natural Science, 2020, 41(9): 1285-1291. |
| [10] | LIU Jie, YAN Qing-dong, MA Yue, TANG Zheng-hua. Global Path Planning Based on Improved Ant Colony Optimization Algorithm for Geometry [J]. Journal of Northeastern University Natural Science, 2015, 36(7): 923-928. |
| [11] | LI Li, FANG Lijin, WANG Guoxun. Cutting Robot PostProcessing Method Based on STEPNC [J]. Journal of Northeastern University Natural Science, 2014, 35(11): 1612-1616. |
| [12] | HUANG Yue, WU Chengdong, DONG Jingjing, JIA Zixi. WSNbased Optimal Path Planning for Escaping from Disaster Scene [J]. Journal of Northeastern University, 2013, 34(2): 162-165. |
| [13] | ZHANG Qi, MA Jiacheng, XIE Wei, MA Liyong. Improved Ant Colony AlgorithmBased Path Planning for Mobile Robot〓 [J]. Journal of Northeastern University(Natural Science), 2013, 34(11): 1521-1524. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||