Journal of Northeastern University(Natural Science) ›› 2025, Vol. 46 ›› Issue (3): 12-19.DOI: 10.12068/j.issn.1005-3026.2025.20239047
• Information & Control • Previous Articles Next Articles
Qi-long JIANG( ), Jian XU
), Jian XU
Received:2023-09-12
Online:2025-03-15
Published:2025-05-29
Contact:
Qi-long JIANG
About author:JIANG Qi-long, E-mail: double_long@126.com
CLC Number:
Qi-long JIANG, Jian XU. Application of Improved PSO-PH-RRT* Algorithm in Intelligent Vehicle Path Planning[J]. Journal of Northeastern University(Natural Science), 2025, 46(3): 12-19.
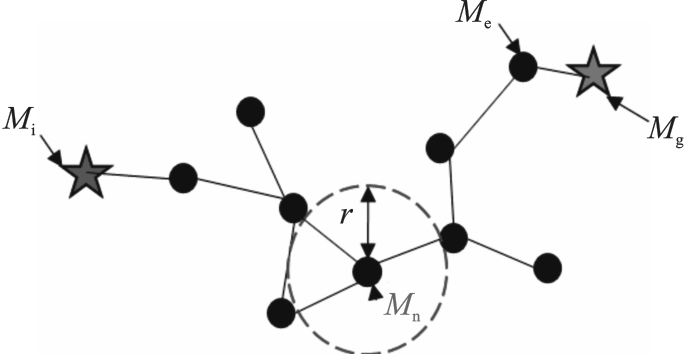
Fig.1 Node expansion schematic diagram of RRT* algorithm
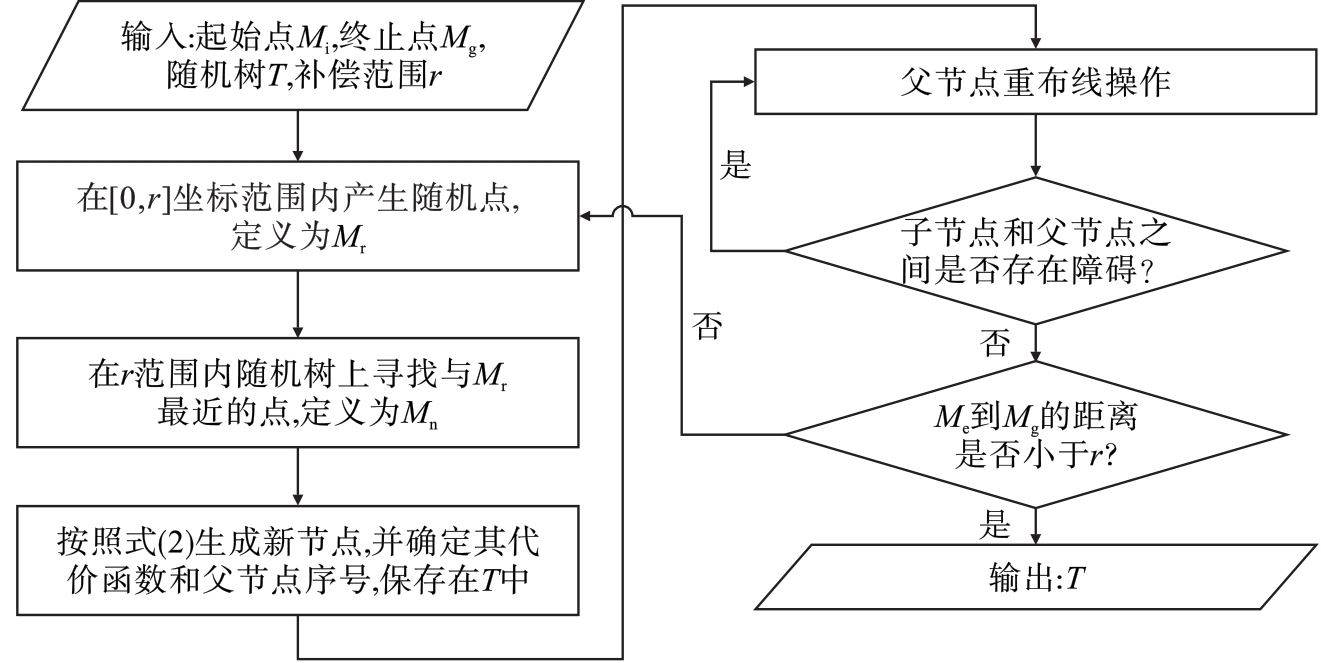
Fig.2 Expanded random tree flowchart of RRT* algorithm
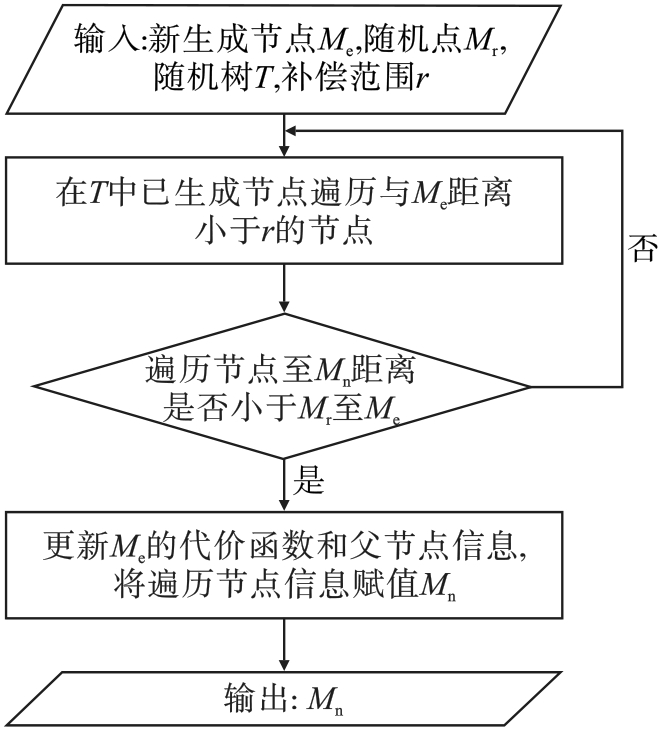
Fig.3 Rewire flowchart of RRT* algorithm
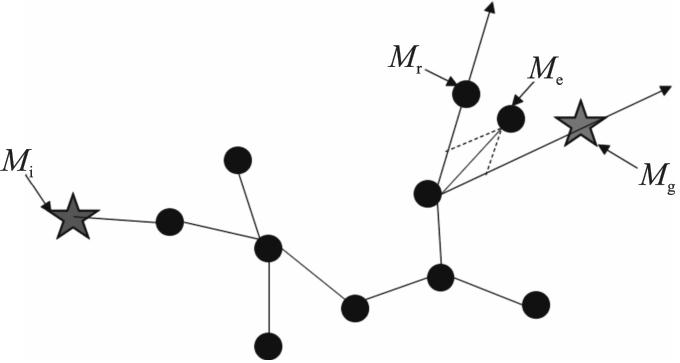
Fig.4 Node expansion schematic diagram of PH-RRT* algorithm
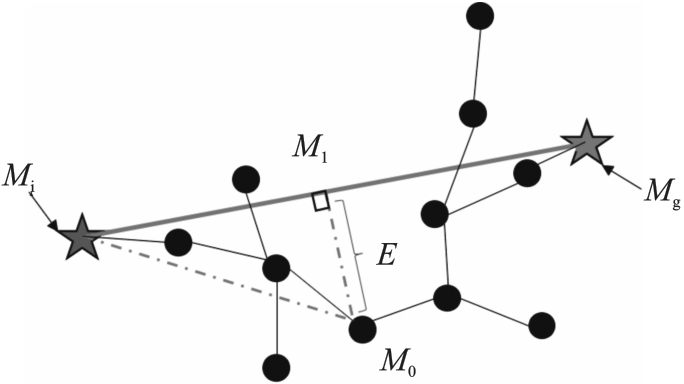
Fig.5 Definition of cost function
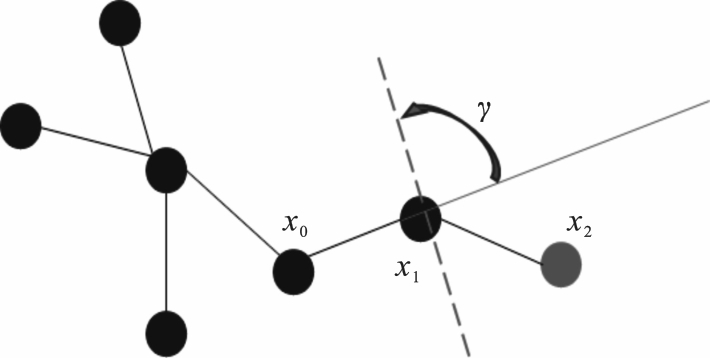
Fig.6 Definition of direction constraint angle γ
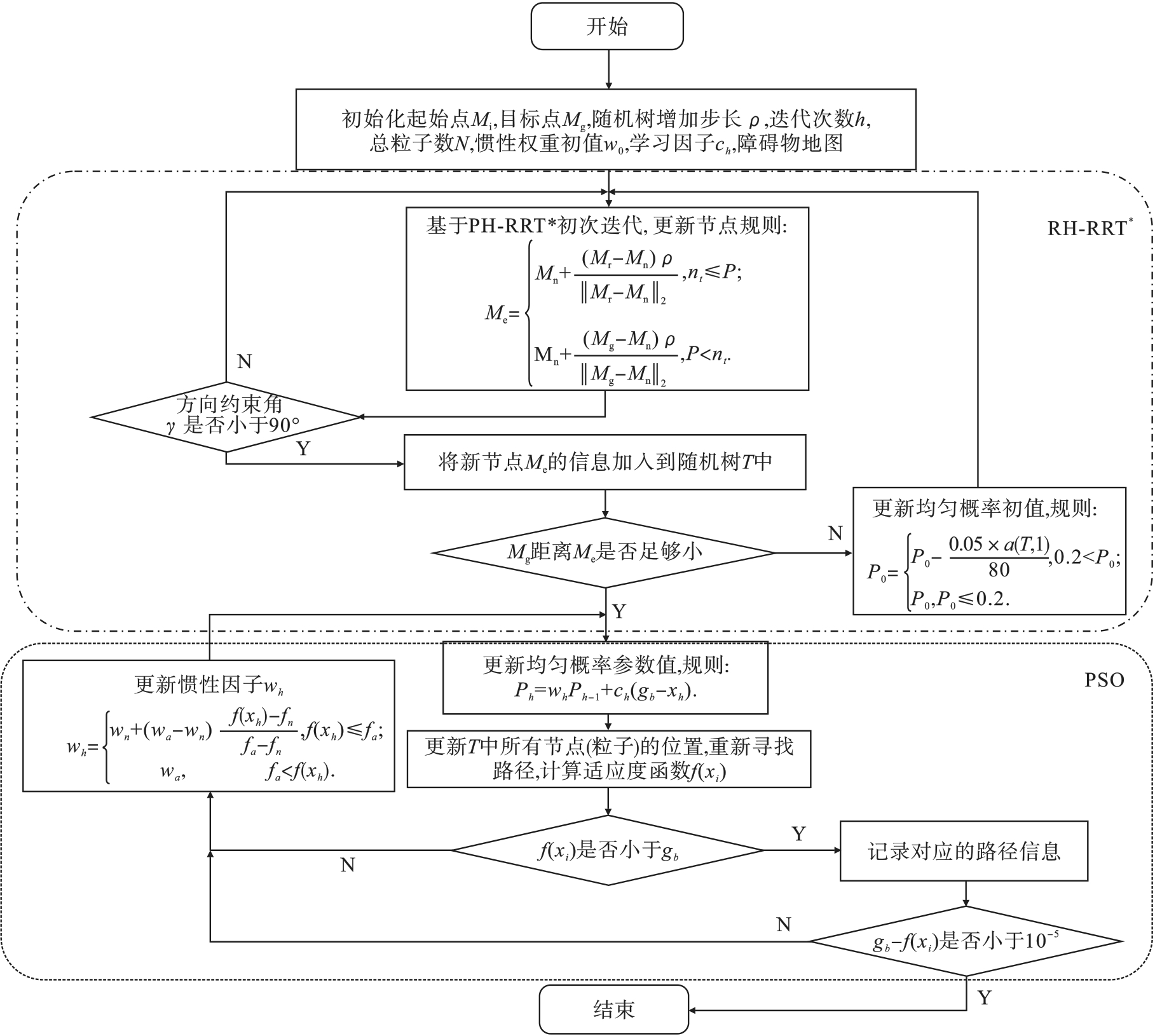
Fig.7 PSO-PH-RRT* algorithm flowchart
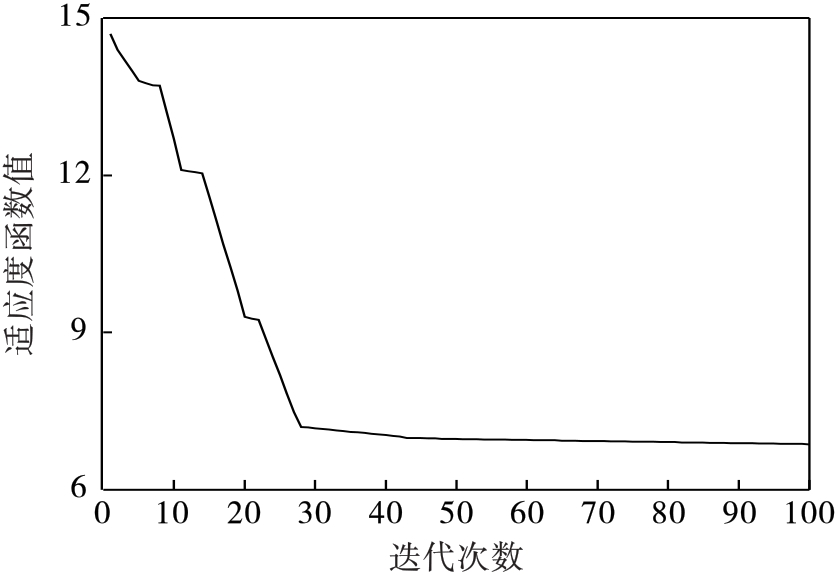
Fig.8 PSO-PH-RRT* algorithm fitness function value change curve
| 算法 | 步长代价函数 | 距离代价函数 |
|---|---|---|
| 原始RRT*算法 | RRT*(lC) | RRT*(E) |
| 均匀概率改进的RRT*算法 | PH-RRT*(lC) | PH-RRT*(E) |
| 粒子群优化的均匀概率RRT*算法 | PSO-PH-RRT*(lC) | PSO-PH-RRT*(E) |
Table 1 Optimization algorithm and cost function comparative experiment plans
| 算法 | 步长代价函数 | 距离代价函数 |
|---|---|---|
| 原始RRT*算法 | RRT*(lC) | RRT*(E) |
| 均匀概率改进的RRT*算法 | PH-RRT*(lC) | PH-RRT*(E) |
| 粒子群优化的均匀概率RRT*算法 | PSO-PH-RRT*(lC) | PSO-PH-RRT*(E) |
| 参数 | 设定值 |
|---|---|
| 随机树增加步长ρ | 5 |
| 均匀概率参数值P | 0.9 |
| 补偿范围r | 5 |
| 迭代次数h | 50 |
| 学习因子ch | 1 |
| 惯性因子初值w0 | 0.5 |
Table 2 Main parameters in the program
| 参数 | 设定值 |
|---|---|
| 随机树增加步长ρ | 5 |
| 均匀概率参数值P | 0.9 |
| 补偿范围r | 5 |
| 迭代次数h | 50 |
| 学习因子ch | 1 |
| 惯性因子初值w0 | 0.5 |
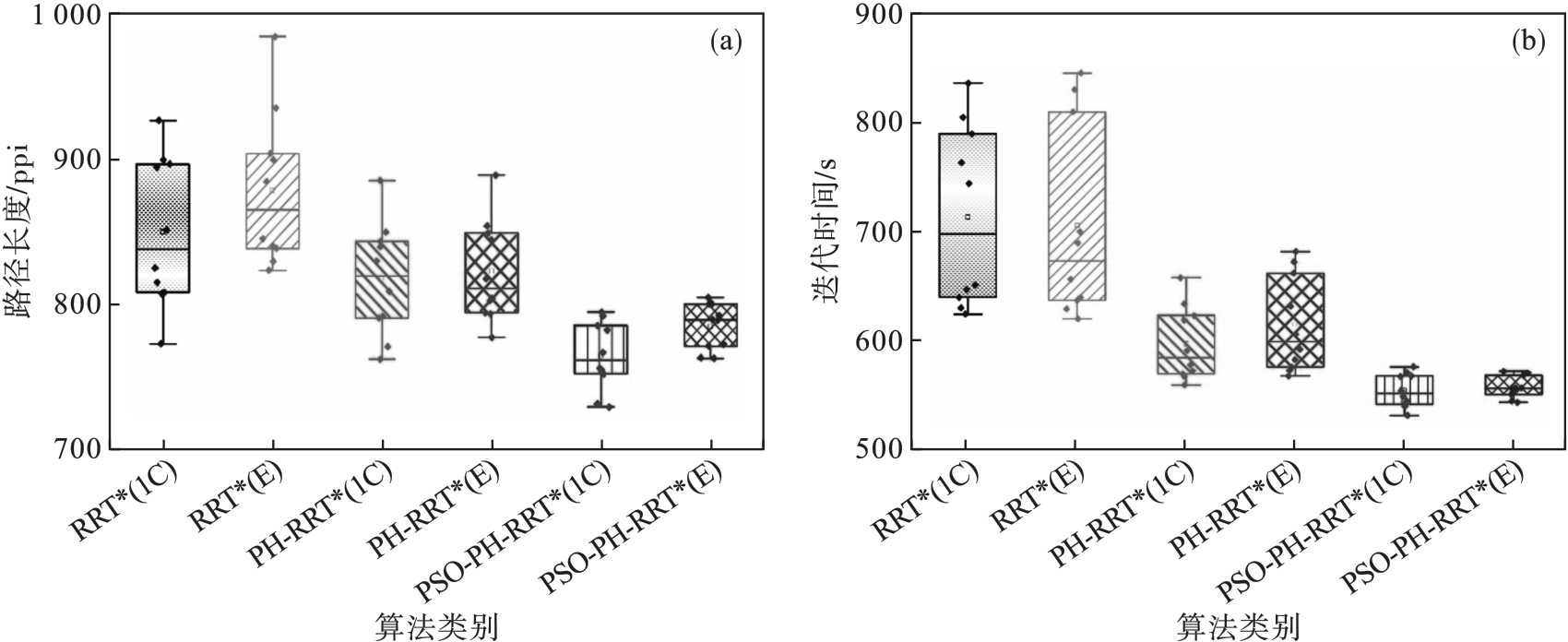
Fig.9 Repeated experimental box plot in random obstacle environment
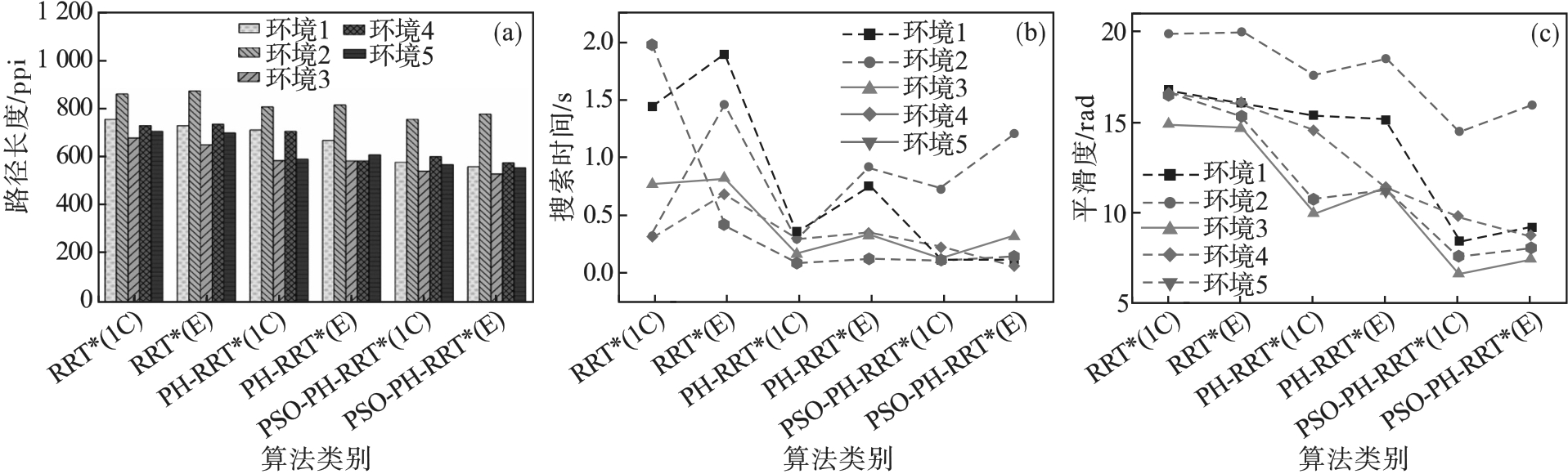
Fig.10 Experiment results statistical chart
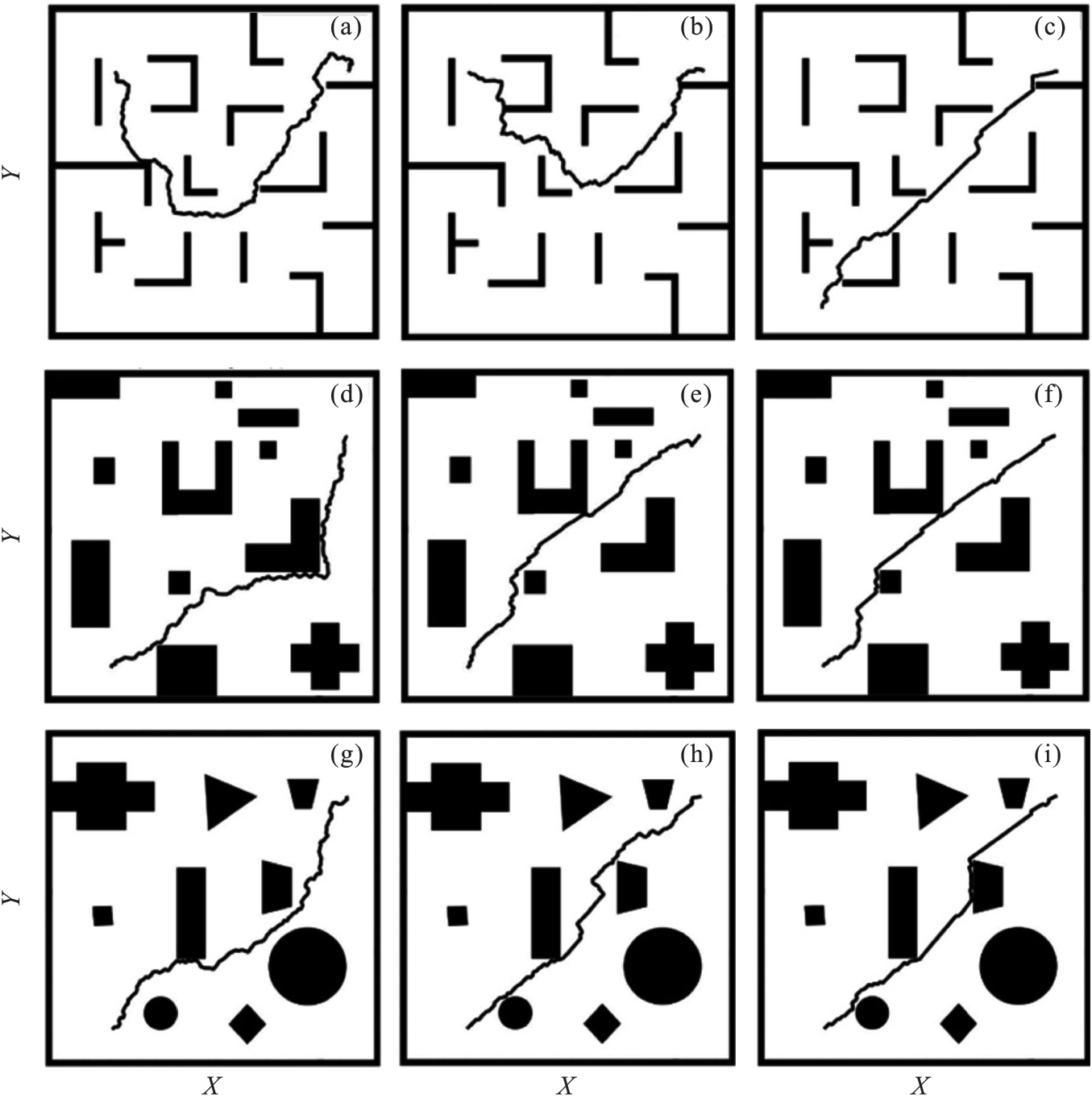
Fig.11 Planning paths consequence
| 1 | 车建涛, 高方玉, 解玉文, 等. 基于Dijkstra算法的水下机器人路径规划[J]. 机械设计与研究, 2020, 36(1):44-48. |
| Che Jian-tao, Gao Fang-yu, Xie Yu-wen, et al. Path planning of underwater robot based on Dijkstra algorithm[J]. Machine Design & Research, 2020, 36(1):44-48. | |
| 2 | Tang F. Coverage path planning of unmanned surface vehicle based on improved biological inspired neural network[J]. Ocean Engineering, 2023, 278:114354. |
| 3 | Madridano Á, Kaff A, Martín D, et al. Trajectory planning for multi-robot systems:methods and applications[J]. Expert Systems with Applications, 2021, 173:114660. |
| 4 | La S M, Kuffner J J Jr. Randomized kinodynamic planning[J]. The International Journal of Robotics Research, 2001, 20(5):378-400. |
| 5 | Urmson C, Simmons R. Approaches for heuristically biasing RRT growth[C]//RSJ International Conference on Intelligent Robots and Systems. Las Vegas, 2003:1178-1183. |
| 6 | Li Z, Ma H B, Zhang X F, et al. Path planning of the dual-arm robot based on VT-RRT algorithm[C]//Chinese Control Conference. Guangzhou: 2019:4359-4364. |
| 7 | Kuffner J J, LaValle S M. RRT-connect: an efficient approach to single-query path planning[C]//IEEE International Conference on Robotics and Automation. San Francisco, 2000:995-1001. |
| 8 | Karaman S, Frazzoli E. Sampling-based algorithms for optimal motion planning[J]. The International Journal of Robotics Research, 2011, 30(7):846-894. |
| 9 | Wang B Y, Liu Z, Li Q B, et al. Mobile robot path planning in dynamic environments through globally guided reinforcement learning[J]. IEEE Robotics and Automation Letters, 2020, 5(4): 6932-6939. |
| 10 | Noreen I, Khan A, Habib Z. A comparison of RRT, RRT* and RRT*-smart path planning algorithms[J]. International Journal of Computer Science and Network Security, 2016, 16(10):20-27. |
| 11 | Hess R, Jerg R, Lindeholz T, et al. SRRT*-a probabilistic optimal trajectory planner for problematic area structures[J]. IFAC-PapersOnLine, 2016, 49(30):331-336. |
| 12 | 白晓兰, 周文全, 张振朋, 等. 基于启发式粒子群算法的机器人平滑路径规划[J]. 组合机床与自动化加工技术, 2022(8):44-47,52. |
| Bai Xiao-lan, Zhou Wen-quan, Zhang Zhen-peng, et al. Smooth path planning of wheeled robot based on heuristic particle swarm optimization algorithm[J]. Modular Machine Tool & Automatic Manufacturing Technique, 2022(8):44-47,52. | |
| 13 | 屈新怀, 单笛, 孟冠军. 基于靠近目标粒子群算法的AGV路径规划[J]. 合肥工业大学学报(自然科学版), 2022, 45(1):1-6. |
| Qu Xin-huai, Shan Di, Meng Guan-jun. AGV path planning based on particle swarm optimization approaching the target [J]. Journal of Hefei University of Technology(Natural Science Edition), 2022, 45(1):1-6. | |
| 14 | Lin S W, Liu A, Wang J G, et al. An intelligence-based hybrid PSO-SA for mobile robot path planning in warehouse[J]. Journal of Computational Science, 2023, 67:101938. |
| 15 | Krell E, Sheta A, Balasubramanian A P R, al et, Collision-free autonomous robot navigation in unknown environments utilizing PSO for path planning[J].Journal of Artificial Intelligence and Soft Computing Research, 2019, 9(4):267-282. |
| 16 | 彭君. 改进RRT算法在移动机器人路径规划中的应用研究[D]. 南京: 南京邮电大学, 2022. |
| Peng Jun. Application of improved RRT algorithm in mobile robot path planning[D].Nanjing: Nanjing University of Posts and Telecommunications, 2022. | |
| 17 | 左国玉, 陈国栋, 刘月雷, 等. 基于均匀概率的目标启发式RRT机械臂路径规划方法[J]. 北京工业大学学报, 2022, 48(8):812-821. |
| Zuo Guo-yu, Chen Guo-dong, Liu Yue-lei, et al. Target heuristic RRT based on uniform probability for manipulator path planning[J]. Journal of Beijing University of Technology, 2022, 48(8):812-821. |
| [1] | Yu-long PEI, Shuang-zhu ZHAI. Active Obstacle Avoidance Path Planning for Multi-scenario Autonomous Vehicles Under Icy and Snowy Road Conditions [J]. Journal of Northeastern University(Natural Science), 2025, 46(3): 1-11. |
| [2] | Jin-hua XU, Fei WANG, Fei HAN, Yan LI. A Method for Path Planning of Multi-vehicles Collaboration with Multi-agricultural UAVs [J]. Journal of Northeastern University(Natural Science), 2024, 45(2): 296-304. |
| [3] | ZHAO Jun-tao, LUO Xiao-chuan, LIU Jun-mi. Application of Improved Whale Optimization Algorithm in Robot Path Planning [J]. Journal of Northeastern University(Natural Science), 2023, 44(8): 1065-1071. |
| [4] | LIU Xiao-xi, JIANG Hui-yan, LUO Min. Multi-constraint Optimal Puncture Path Planning Algorithm for Liver Cancer Ablation [J]. Journal of Northeastern University(Natural Science), 2023, 44(7): 922-930. |
| [5] | ZHAO Zhao, YUAN Pei-xin, TANG Jun-wen, CHEN Jin-lin. Agent Path Planning Algorithm Based on Improved SNN-HRL [J]. Journal of Northeastern University(Natural Science), 2023, 44(11): 1548-1555. |
| [6] | WANG Hai-fang, CUI Yang-yang, LI Ming-fei, LI Guang-yu. Mobile Robot Path Planning Algorithm Based on Improved RRT*FN [J]. Journal of Northeastern University(Natural Science), 2022, 43(9): 1217-1225. |
| [7] | LIU Qi-ran, LIAN Jing, CHEN Shi, FAN Rong. Motion Planning Algorithm of Autonomous Driving Considering Interactive Trajectory Prediction [J]. Journal of Northeastern University(Natural Science), 2022, 43(7): 930-936. |
| [8] | ZHANG Yu, LI Dong-sheng, WANG Zhi-wei, GONG Ya-dong. Shortest Tool Path Generation Method for STEP-NC Complex Pockets Based on Graph Theory and Improved Dijkstra Algorithm [J]. Journal of Northeastern University Natural Science, 2020, 41(9): 1285-1291. |
| [9] | LIU Jie, YAN Qing-dong, MA Yue, TANG Zheng-hua. Global Path Planning Based on Improved Ant Colony Optimization Algorithm for Geometry [J]. Journal of Northeastern University Natural Science, 2015, 36(7): 923-928. |
| [10] | JI Ce, WANG Yan-ru, WANG Xiao-yu. A New Complex Blind Source Separation Algorithm Based on Standard Kurtosis [J]. Journal of Northeastern University Natural Science, 2015, 36(5): 614-617. |
| [11] | LI Li, FANG Lijin, WANG Guoxun. Cutting Robot PostProcessing Method Based on STEPNC [J]. Journal of Northeastern University Natural Science, 2014, 35(11): 1612-1616. |
| [12] | HUANG Yue, WU Chengdong, DONG Jingjing, JIA Zixi. WSNbased Optimal Path Planning for Escaping from Disaster Scene [J]. Journal of Northeastern University, 2013, 34(2): 162-165. |
| [13] | ZHANG Qi, MA Jiacheng, XIE Wei, MA Liyong. Improved Ant Colony AlgorithmBased Path Planning for Mobile Robot〓 [J]. Journal of Northeastern University(Natural Science), 2013, 34(11): 1521-1524. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||