Journal of Northeastern University(Natural Science) ›› 2025, Vol. 46 ›› Issue (6): 66-75.DOI: 10.12068/j.issn.1005-3026.2025.20240096
• Mechanical Engineering • Previous Articles Next Articles
Bo XIN, Hong-liang LI, Wen-xin SUN, Ming-jun LIU
Received:2023-08-27
Online:2025-06-15
Published:2025-09-01
CLC Number:
Bo XIN, Hong-liang LI, Wen-xin SUN, Ming-jun LIU. Transfer Learning-Based Robotic Belt Grinding Process for NiCo-FGM[J]. Journal of Northeastern University(Natural Science), 2025, 46(6): 66-75.
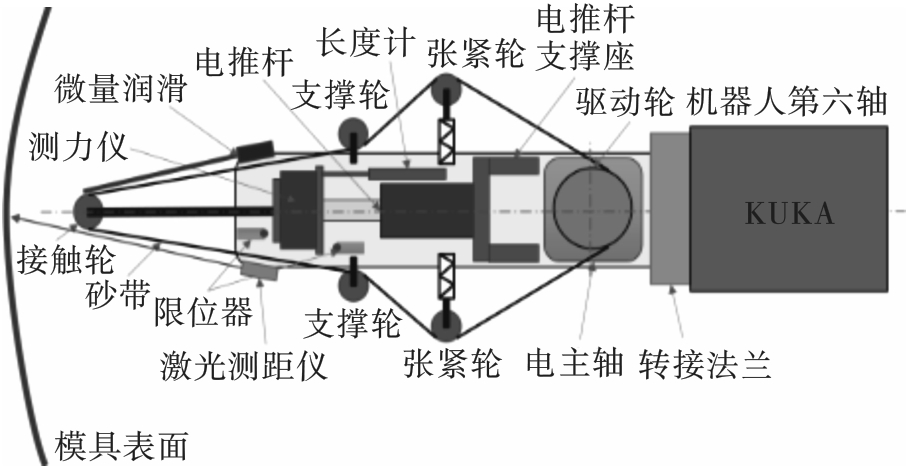
Fig.1 Mechanical structure schematic diagram
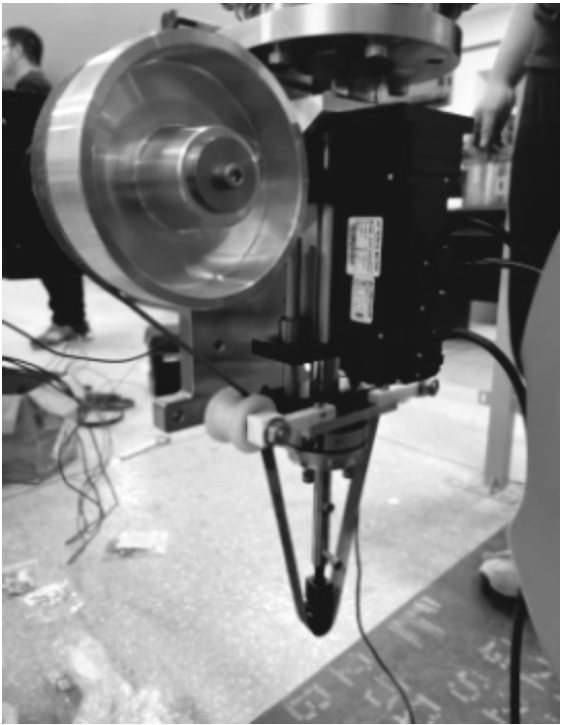
Fig.2 Mechanical structure physical drawing
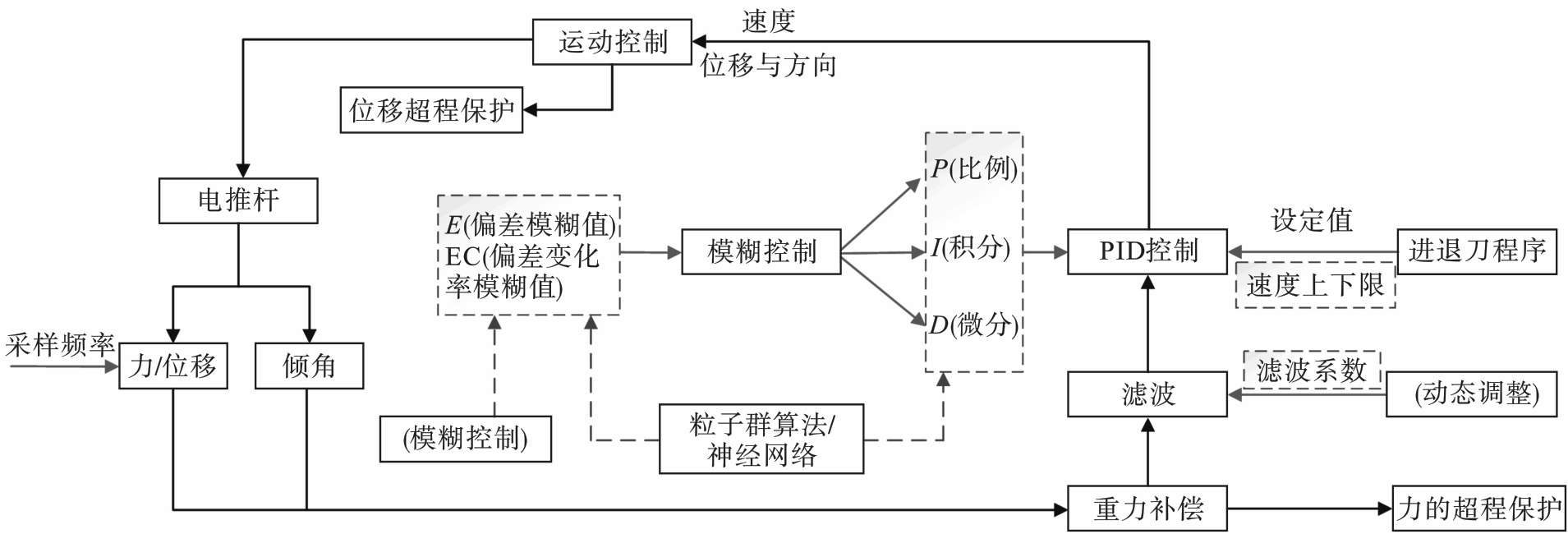
Fig.3 Control algorithm logic diagram
| 参数 | IN718 | Stellite 6 |
|---|---|---|
| 弹性模量/GPa | 205 | 230 |
| 泊松比 | 0.3 | 0.34 |
| 线膨胀系数×106/℃-1 | 13.0 | 13.6 |
| 导热系数/[W·(m·K)-1] | 11.4 | 13.6 |
| 比热容/[J·(kg·K)-1] | 435 | 500 |
Table 1 Thermophysical parameters of IN718 and Stellite 6 (20 ℃)
| 参数 | IN718 | Stellite 6 |
|---|---|---|
| 弹性模量/GPa | 205 | 230 |
| 泊松比 | 0.3 | 0.34 |
| 线膨胀系数×106/℃-1 | 13.0 | 13.6 |
| 导热系数/[W·(m·K)-1] | 11.4 | 13.6 |
| 比热容/[J·(kg·K)-1] | 435 | 500 |
| 参数名称 | 值 |
|---|---|
| 水质量分数×108/% | <4 |
| 氧质量分数×108/% | <100 |
| 激光功率/W | 1 800 |
| 扫描速率/(mm∙min-1) | 600 |
| 送粉速率/(g∙min-1) | 15 |
Table 2 Experimental parameters
| 参数名称 | 值 |
|---|---|
| 水质量分数×108/% | <4 |
| 氧质量分数×108/% | <100 |
| 激光功率/W | 1 800 |
| 扫描速率/(mm∙min-1) | 600 |
| 送粉速率/(g∙min-1) | 15 |
| 粉末材料 | C | Si | Mn | Cr | Mo | Ti | Fe | Al | Co | Ni |
|---|---|---|---|---|---|---|---|---|---|---|
| IN718 | 0.05 | 0.71 | 0.16 | 18.17 | 2.32 | 0.93 | 20.89 | 0.63 | — | 余量 |
| Stellite 6 | 1.15 | 1.58 | 0.75 | 31.25 | 0.89 | — | 3.54 | — | 余量 | 2.54 |
Table 3 Chemical composition of powder material (mass fraction)
| 粉末材料 | C | Si | Mn | Cr | Mo | Ti | Fe | Al | Co | Ni |
|---|---|---|---|---|---|---|---|---|---|---|
| IN718 | 0.05 | 0.71 | 0.16 | 18.17 | 2.32 | 0.93 | 20.89 | 0.63 | — | 余量 |
| Stellite 6 | 1.15 | 1.58 | 0.75 | 31.25 | 0.89 | — | 3.54 | — | 余量 | 2.54 |
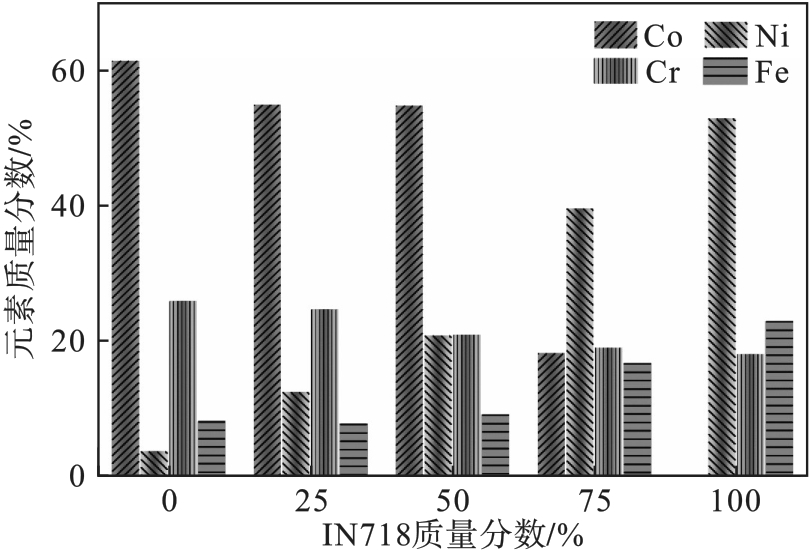
Fig.4 Mass fractions of four main elements changing with the content of IN718
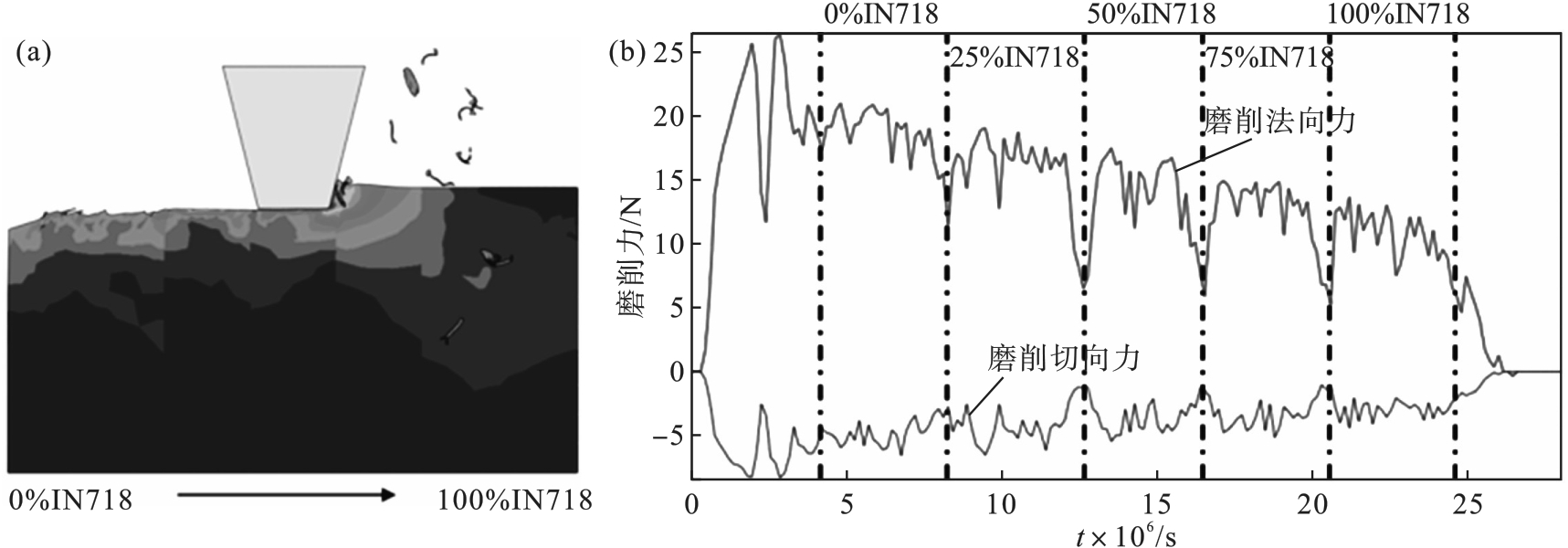
Fig.5 Continuous grinding force change of NiCo-FGM in different grinding directions
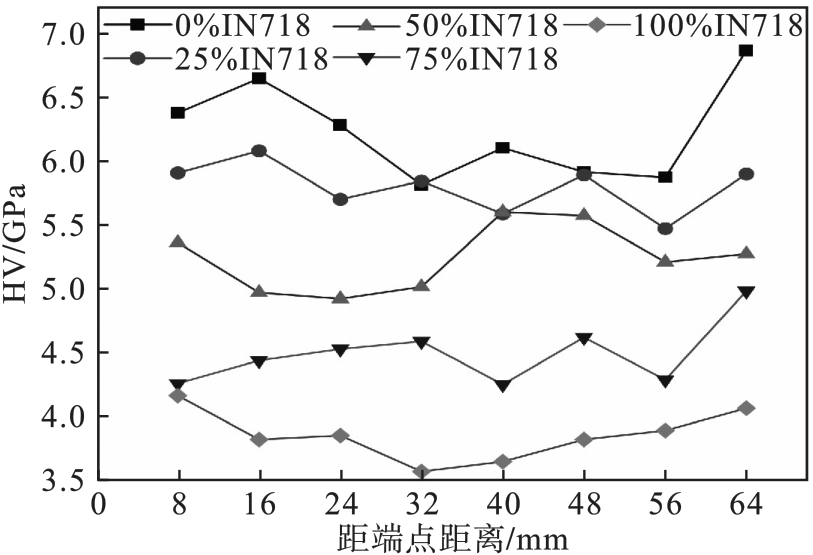
Fig.6 Hardness of NiCo-FGM alloy by gradient
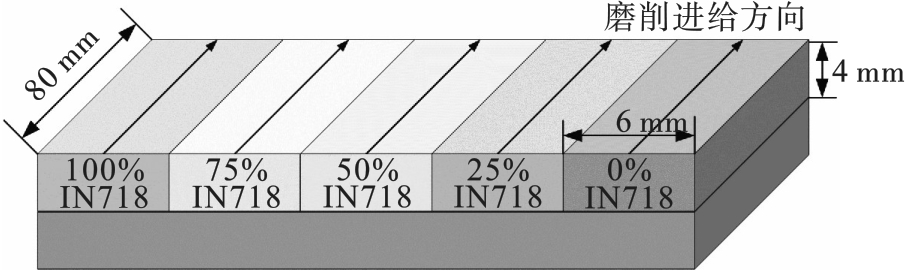
Fig.7 Schematic diagram of the grinding program
| 水平 | 因素 | ||
|---|---|---|---|
| vs /(m·s-1) | Fn /N | vw /(mm·s-1) | |
| 1 | 4.712 | 4 | 3 |
| 2 | 7.069 | 8 | 4.5 |
| 3 | 9.425 | 12 | 6 |
Table 4 Orthogonal experimental level table of IN718
| 水平 | 因素 | ||
|---|---|---|---|
| vs /(m·s-1) | Fn /N | vw /(mm·s-1) | |
| 1 | 4.712 | 4 | 3 |
| 2 | 7.069 | 8 | 4.5 |
| 3 | 9.425 | 12 | 6 |
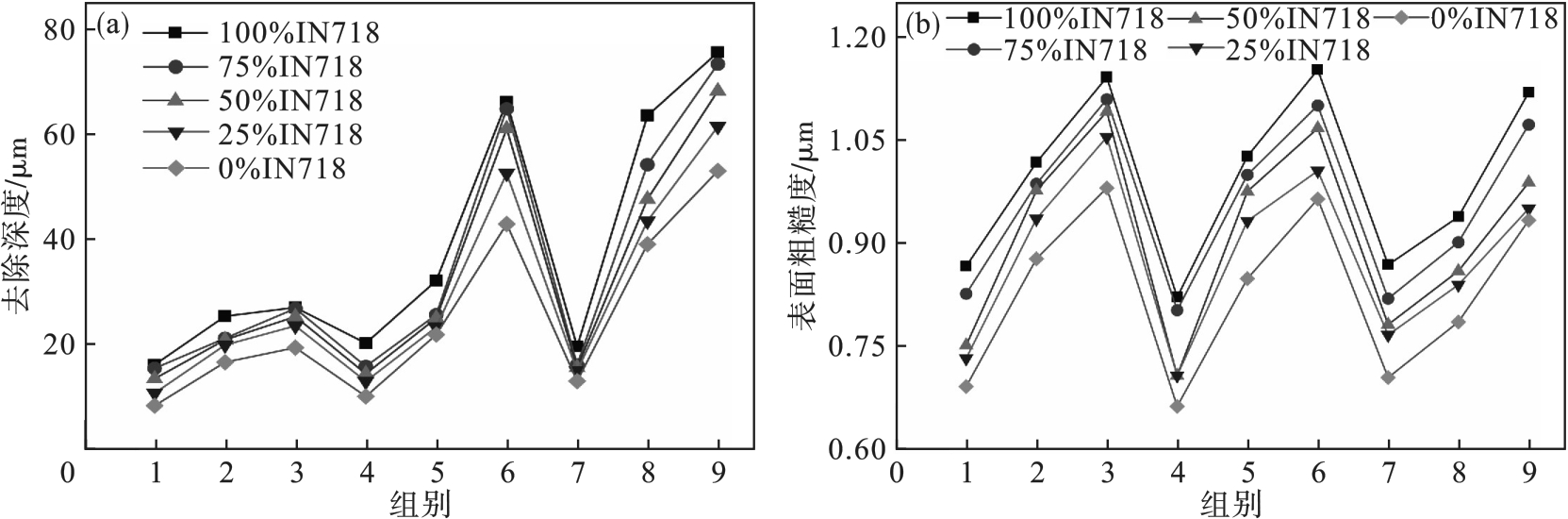
Fig.8 Results of the orthogonal experiments
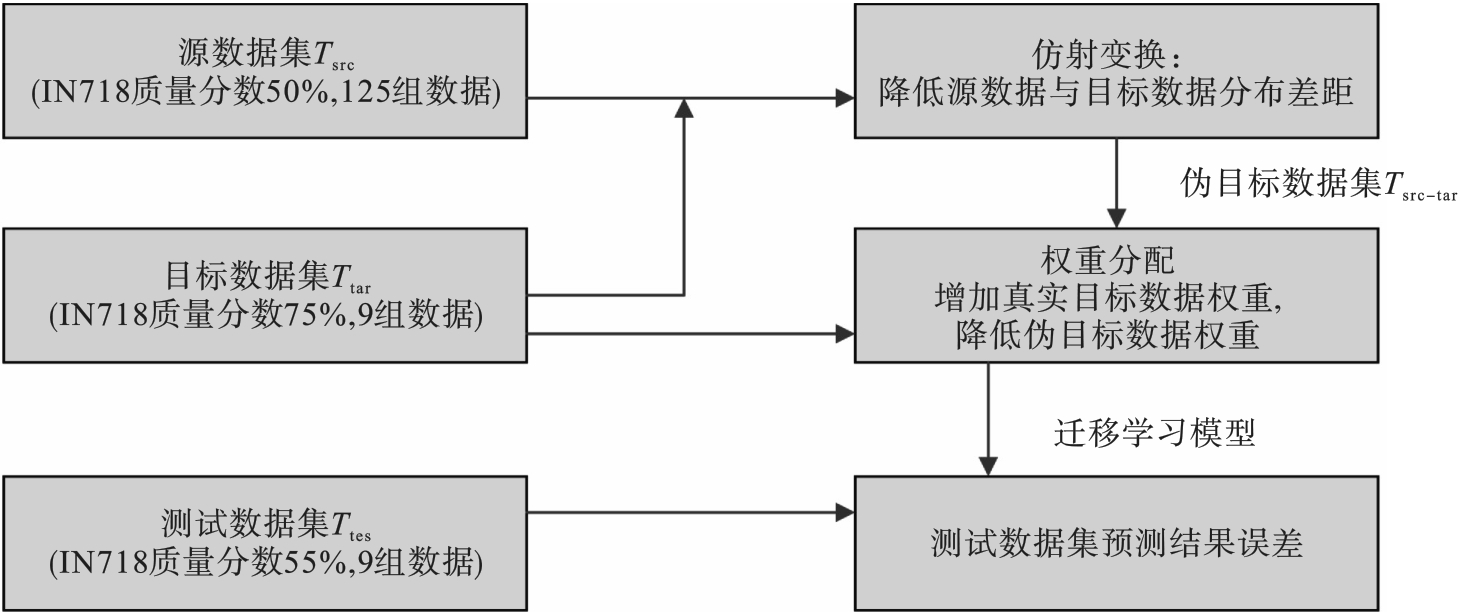
Fig.9 Flowchart for transfer learning
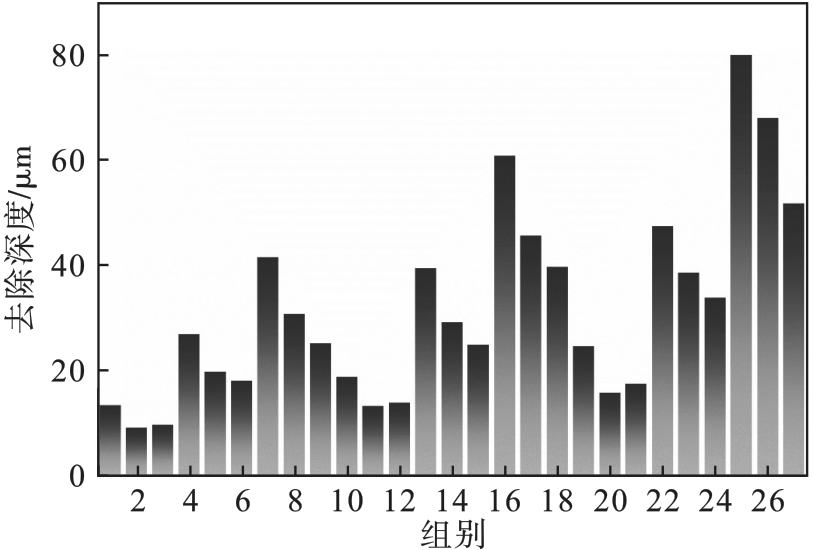
Fig.10 Expanded experimental results of 50%IN718
| 水平 | 因素 | ||
|---|---|---|---|
| vs /(m·s-1) | Fn /N | vw /(mm·s-1) | |
| 1 | 5.312 | 5 | 3.4 |
| 2 | 7.669 | 9 | 4.9 |
| 3 | 10.025 | 13 | 6.4 |
Table 5 Orthogonal experimental level table of
| 水平 | 因素 | ||
|---|---|---|---|
| vs /(m·s-1) | Fn /N | vw /(mm·s-1) | |
| 1 | 5.312 | 5 | 3.4 |
| 2 | 7.669 | 9 | 4.9 |
| 3 | 10.025 | 13 | 6.4 |
| 编号 | vw/(mm·s-1) | Fn/N | vs/(m·s-1) | 去除深度h/μm | 预测误差/% | ||
|---|---|---|---|---|---|---|---|
| 神经网络 | 经验公式 | 迁移学习 | |||||
| 平均 | — | — | — | — | 38.071 | 9.405 | 5.336 |
| 1 | 5.312 | 5 | 3.4 | 15.545 | 24.451 | 19.735 | 15.840 |
| 2 | 5.312 | 9 | 4.9 | 28.655 | 43.600 | 8.909 | 5.362 |
| 3 | 5.312 | 13 | 6.4 | 35.296 | 68.530 | 11.249 | 2.596 |
| 4 | 7.669 | 5 | 4.9 | 22.247 | 94.781 | 10.042 | 10.366 |
| 5 | 7.669 | 9 | 6.4 | 28.181 | 35.695 | 7.294 | 2.882 |
| 6 | 7.669 | 13 | 3.4 | 67.068 | 0.298 | 6.957 | 1.644 |
| 7 | 10.025 | 5 | 6.4 | 23.442 | 53.298 | 10.014 | 7.087 |
| 8 | 10.025 | 9 | 3.4 | 59.917 | 6.311 | 5.153 | 0.769 |
| 9 | 10.025 | 13 | 4.9 | 74.106 | 15.670 | 5.295 | 1.477 |
Table 6 Comparison of empirical formulas, neural networks and transfer learning errors in the removal depth
| 编号 | vw/(mm·s-1) | Fn/N | vs/(m·s-1) | 去除深度h/μm | 预测误差/% | ||
|---|---|---|---|---|---|---|---|
| 神经网络 | 经验公式 | 迁移学习 | |||||
| 平均 | — | — | — | — | 38.071 | 9.405 | 5.336 |
| 1 | 5.312 | 5 | 3.4 | 15.545 | 24.451 | 19.735 | 15.840 |
| 2 | 5.312 | 9 | 4.9 | 28.655 | 43.600 | 8.909 | 5.362 |
| 3 | 5.312 | 13 | 6.4 | 35.296 | 68.530 | 11.249 | 2.596 |
| 4 | 7.669 | 5 | 4.9 | 22.247 | 94.781 | 10.042 | 10.366 |
| 5 | 7.669 | 9 | 6.4 | 28.181 | 35.695 | 7.294 | 2.882 |
| 6 | 7.669 | 13 | 3.4 | 67.068 | 0.298 | 6.957 | 1.644 |
| 7 | 10.025 | 5 | 6.4 | 23.442 | 53.298 | 10.014 | 7.087 |
| 8 | 10.025 | 9 | 3.4 | 59.917 | 6.311 | 5.153 | 0.769 |
| 9 | 10.025 | 13 | 4.9 | 74.106 | 15.670 | 5.295 | 1.477 |
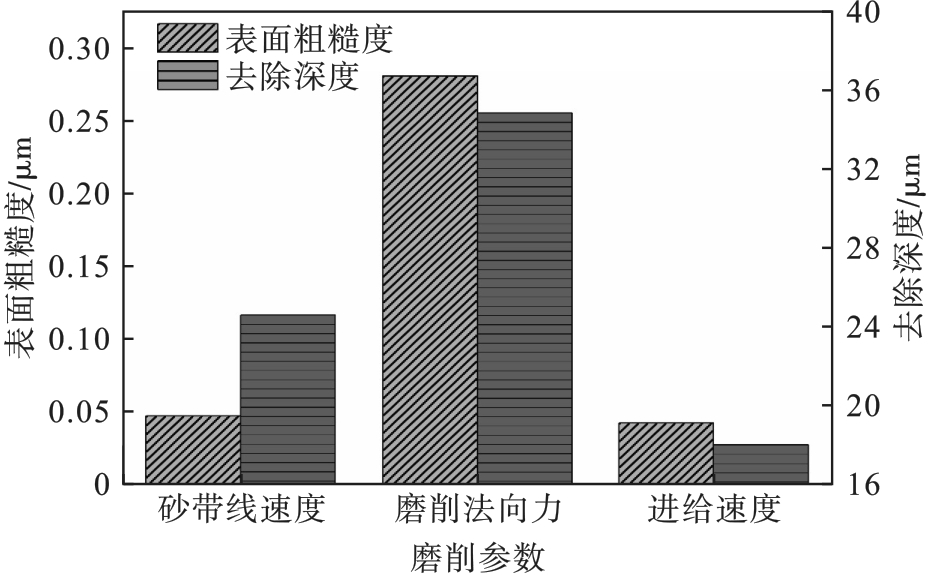
Fig.11 Extreme variance analysis results
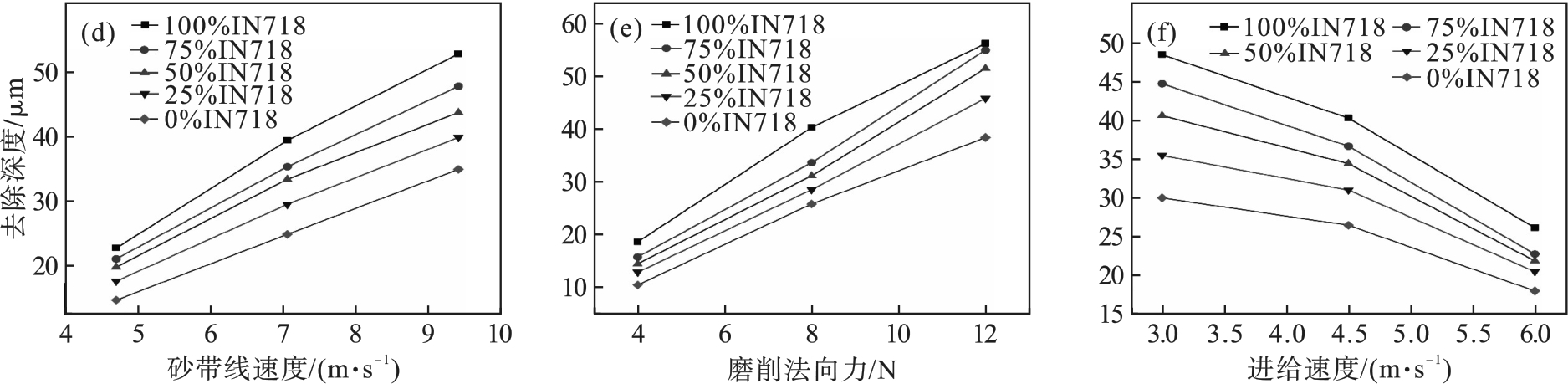
Fig.12 Mean value analysis results
| 目标去除深度h/μm | 磨削法向力/N | ||||
|---|---|---|---|---|---|
| 100%IN718 | 75%IN718 | 50%IN718 | 25%IN718 | 0%IN718 | |
| 20 | 3.929 | 5.012 | 5.370 | 5.784 | 7.074 |
| 22 | 4.397 | 5.459 | 5.877 | 6.277 | 7.591 |
| 24 | 4.865 | 5.905 | 6.383 | 6.761 | 8.095 |
| 26 | 5.333 | 6.348 | 6.885 | 7.237 | 8.587 |
| 28 | 5.801 | 6.789 | 7.386 | 7.707 | 9.071 |
| 30 | 6.270 | 7.227 | 7.885 | 8.174 | 9.549 |
| 32 | 6.739 | 7.662 | 8.382 | 8.640 | 10.024 |
| 34 | 7.208 | 8.095 | 8.878 | 9.108 | 10.498 |
| 36 | 7.678 | 8.527 | 9.372 | 9.580 | 10.974 |
Table 7 Grinding normal forces with different IN718 contents at the same removal depth
| 目标去除深度h/μm | 磨削法向力/N | ||||
|---|---|---|---|---|---|
| 100%IN718 | 75%IN718 | 50%IN718 | 25%IN718 | 0%IN718 | |
| 20 | 3.929 | 5.012 | 5.370 | 5.784 | 7.074 |
| 22 | 4.397 | 5.459 | 5.877 | 6.277 | 7.591 |
| 24 | 4.865 | 5.905 | 6.383 | 6.761 | 8.095 |
| 26 | 5.333 | 6.348 | 6.885 | 7.237 | 8.587 |
| 28 | 5.801 | 6.789 | 7.386 | 7.707 | 9.071 |
| 30 | 6.270 | 7.227 | 7.885 | 8.174 | 9.549 |
| 32 | 6.739 | 7.662 | 8.382 | 8.640 | 10.024 |
| 34 | 7.208 | 8.095 | 8.878 | 9.108 | 10.498 |
| 36 | 7.678 | 8.527 | 9.372 | 9.580 | 10.974 |
| 磨削法向力Fn/N | 去除深度/μm | ||||
|---|---|---|---|---|---|
| 100%IN718 | 75%IN718 | 50%IN718 | 25%IN718 | 0%IN718 | |
| 5.370 | 26.419 | 21.309 | 20.000 | 17.882 | 15.593 |
| 5.877 | 28.760 | 23.728 | 22.000 | 19.869 | 17.380 |
| 6.383 | 31.075 | 26.110 | 24.000 | 21.838 | 19.114 |
| 6.885 | 33.378 | 28.472 | 26.000 | 23.803 | 20.810 |
| 7.386 | 35.676 | 30.835 | 28.000 | 25.778 | 22.485 |
| 7.885 | 37.979 | 33.217 | 30.000 | 27.779 | 24.158 |
| 8.382 | 40.292 | 35.635 | 32.000 | 29.817 | 25.849 |
| 8.878 | 42.617 | 38.099 | 34.000 | 31.896 | 27.573 |
| 9.372 | 44.955 | 40.607 | 36.000 | 34.013 | 29.336 |
Table 8 Removal depths of different IN718 contents under the same grinding normal force
| 磨削法向力Fn/N | 去除深度/μm | ||||
|---|---|---|---|---|---|
| 100%IN718 | 75%IN718 | 50%IN718 | 25%IN718 | 0%IN718 | |
| 5.370 | 26.419 | 21.309 | 20.000 | 17.882 | 15.593 |
| 5.877 | 28.760 | 23.728 | 22.000 | 19.869 | 17.380 |
| 6.383 | 31.075 | 26.110 | 24.000 | 21.838 | 19.114 |
| 6.885 | 33.378 | 28.472 | 26.000 | 23.803 | 20.810 |
| 7.386 | 35.676 | 30.835 | 28.000 | 25.778 | 22.485 |
| 7.885 | 37.979 | 33.217 | 30.000 | 27.779 | 24.158 |
| 8.382 | 40.292 | 35.635 | 32.000 | 29.817 | 25.849 |
| 8.878 | 42.617 | 38.099 | 34.000 | 31.896 | 27.573 |
| 9.372 | 44.955 | 40.607 | 36.000 | 34.013 | 29.336 |
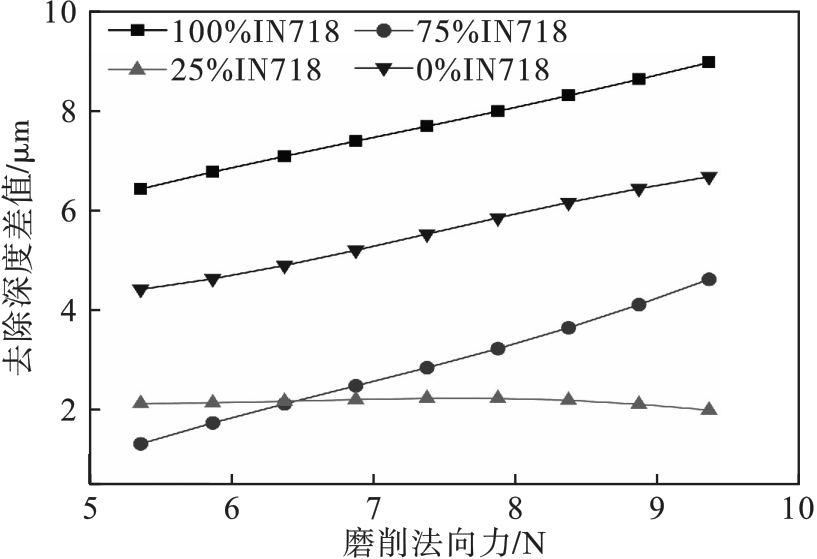
Fig.13 Removal depth difference
| [1] | Loh G H, Pei E, Harrison D, et al. An overview of functionally graded additive manufacturing[J]. Additive Manufacturing, 2018, 23: 34-44. |
| [2] | Wang Y F, Chen X Z, Su C C. Microstructure and mechanical properties of Inconel 625 fabricated by wire-arc additive manufacturing[J]. Surface and Coatings Technology, 2019, 374: 116-123. |
| [3] | Bobbio L D, Otis R A, Borgonia J P, et al. Additive manufacturing of a functionally graded material from Ti-6Al-4V to Invar: experimental characterization and thermodynamic calculations[J]. Acta Materialia, 2017, 127: 133-142. |
| [4] | 于富明. 基于工件曲率的变压力砂带磨削技术研究[D]. 沈阳:东北大学,2017. |
| Yu Fu-ming. Research on variable pressure abrasive belt grinding technology based on workpiece curvature [D]. Shenyang: Northeastern University,2017. | |
| [5] | 王恭硕. 面向航空发动机整体叶盘材料去除精度要求的机器人磨抛技术研究[D]. 武汉:华中科技大学,2022. |
| Wang Gong-shuo. Research on robotic grinding and polishing technology for aero-engine integral blisk material removal accuracy requirements [D]. Wuhan: Huazhong University of Science and Technology, 2022. | |
| [6] | 巩亚东,赵显力,张伟健,等.机器人砂带磨削单磨粒材料去除影响因素[J].东北大学学报(自然科学版),2023,44(9):1285-1291. |
| Gong Ya-dong, Zhao Xian-li, Zhang Wei-jian,et al. Factors influencing single abrasive material removal for robotic abrasive belt grinding[J]. Journal of Northeastern University(Natural Science), 2023, 44(9): 1285-1291. | |
| [7] | Preston F W. The theory and design of plate glass polishing machines [J]. Journal of the Society of Glass Technology, 1927(11):277-281. |
| [8] | 计时鸣, 李琛, 谭大鹏, 等. 基于Preston方程的软性磨粒流加工特性[J].机械工程学报, 2011,47(17):156-163. |
| Ji Shi-ming, Li Chen, Tan Da-peng, et al. Study on machinability of softness abrasive flow based on Preston equation[J]. Journal of Mechanical Engineering, 2011,47(17):156-163. | |
| [9] | 张雷, 袁楚明, 周祖德, 等. 模具曲面抛光时表面去除的建模与试验研究[J]. 机械工程学报, 2002, 38(12):98-102. |
| Zhang Lei, Yuan Chu-ming, Zhou Zu-de, et al. Modeling and experiment of material removal in polishing on mold curved surfaces[J]. Chinese Journal of Mechanical Engineering, 2002, 38(12):98-102. | |
| [10] | Cabaravdic M, Kuhlenköetter B. Optimising belt grinding processes[J]. Metal Surface, 2005(4):44-47. |
| [11] | Himeur Y, Elnour M, Fadli F, et al. Next-generation energy systems for sustainable smart cities: roles of transfer learning[J]. Sustainable Cities and Society, 2022, 85: 104059. |
| [12] | Hazarika D, Poria S, Zimmermann R, et al. Conversational transfer learning for emotion recognition[J]. Information Fusion, 2021, 65: 1-12. |
| [13] | Lu J, Bebbood V, Hao P, et al. Transfer learning using computational intelligence: a survey[J]. Knowledge-Based Systems, 2015, 80: 14-23. |
| [14] | Zhuang F Z, Qi Z Y, Duan K Y, et al. A comprehensive survey on transfer learning[J]. Proceedings of the IEEE, 2021, 109(1): 43-76. |
| [15] | Wang J D, Chen Y Q, Feng W J, et al. Transfer learning with dynamic distribution adaptation[J]. ACM Transactions on Intelligent Systems and Technology, 2020, 11(1): 1-25. |
| [16] | Tzeng E, Hoffman J, Darrell T, et al. Simultaneous deep transfer across domains and tasks[C]// 2015 IEEE International Conference on Computer Vision(ICCV). Santiago, 2015: 4068-4076. |
| [17] | Pardoe D, Stone P. Boosting for regression transfer[C]// 27th International Conference on Machine Learning. Haifa, 2010: 863-870. |
| [18] | 杨吉祥,王恭硕,叶葱葱, 等. 一种基于迁移学习的材料去除率模型的建立方法和装置: CN202110230749.5[P]. 2021-07-06. |
| Yang Ji-xiang, Wang Gong-shuo, Ye Cong-cong, et al. A method and device for establishing a material removal rate model based on transfer learning: CN202110230749.5 [P]. 2021-07-06. |
| [1] | Ling-xuan LI, Zhen-wei MA, Ze-jun YU, Zhuang XING. Method for Bearing Fault Quantitative Diagnosis Based on MTF and Improved Residual Network [J]. Journal of Northeastern University(Natural Science), 2024, 45(5): 697-706. |
| [2] | GONG Ya-dong, ZHAO Xian-li, ZHANG Wei-jian, TANG Ben-jia. Factors Influencing Single Abrasive Material Removal for Robotic Abrasive Belt Grinding [J]. Journal of Northeastern University(Natural Science), 2023, 44(9): 1285-1291. |
| [3] | ZHAO Hai, WANG Xiang, SHI Han, CHEN Jia-wei. A Transfer Learning Framework for EEG Emotion Recognition [J]. Journal of Northeastern University(Natural Science), 2023, 44(7): 913-921. |
| [4] | ZHAO Hai, CHEN Jia-wei, SHI Han, WANG Xiang. A Transfer Learning Algorithm Applied to Human Activity Recognition [J]. Journal of Northeastern University(Natural Science), 2022, 43(6): 776-782. |
| [5] | HOU Dong-xiao, MU Jin-tao, FANG Cheng, SHI Pei-ming. Fault Diagnosis of Variable Speed Bearings Based on GADF and ResNet34 Introduced Transfer Learning [J]. Journal of Northeastern University(Natural Science), 2022, 43(3): 383-389. |
| [6] | WANG Xin-gang, HAN Kai-zhong, WANG Chao, LI Lin. Bearing Remaining Useful Life Prediction Method Based on Transfer Learning [J]. Journal of Northeastern University(Natural Science), 2021, 42(5): 665-672. |
| [7] | WANG Shu, GUAN Zhan-xu, WANG Jing, SUN Xiao-hui. Bayesian Network Parameter Learning Method Based on Transfer Learning [J]. Journal of Northeastern University(Natural Science), 2021, 42(4): 509-515. |
| [8] | CHANG Yu-qing, ZHAO Wei-wei, LIU Le-yuan, KANG Xiao-yun. Modeling of Coal Mill Process Monitoring Based on Instance-based Transfer Learning [J]. Journal of Northeastern University(Natural Science), 2021, 42(10): 1369-1375. |
| [9] | XU Li-sheng, ZHANG Wen-xu, PANG Yu-xuan, WU Cheng-yang. Driver Drowsiness Detection Algorithm Using Short-Time ECG Signals [J]. Journal of Northeastern University Natural Science, 2019, 40(7): 937-941. |
| [10] | QI Lin, LYU Xu-yang, YANG Ben-qiang, XU Li-sheng. Segmentation of Left Ventricle Endocardium Based on Transfer Learning of Fully Convolutional Networks [J]. Journal of Northeastern University Natural Science, 2018, 39(11): 1577-1582. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||