东北大学学报(自然科学版) ›› 2025, Vol. 46 ›› Issue (12): 66-77.DOI: 10.12068/j.issn.1005-3026.2025.20249031
王宪彬, 包文龙, 李麟, 张英哲
收稿日期:2024-06-18
出版日期:2025-12-15
发布日期:2026-02-09
通讯作者:
王宪彬
基金资助:Xian-bin WANG, Wen-long BAO, Lin LI, Ying-zhe ZHANG
Received:2024-06-18
Online:2025-12-15
Published:2026-02-09
Contact:
Xian-bin WANG
摘要:
针对恶劣工况下人机共驾过程中存在的共驾效果即汽车路径跟踪精度与侧向稳定性影响机理探究不系统、不充分的问题,在双驾双控串联式人机共驾框架的基础上,建立了包含驾驶员状态的人机共驾模型,并且设计了基于模型预测控制(MPC)的人机共驾方法;深入研究了驾驶员预瞄时间、车速、路面附着系数、驾驶员状态参数和控制器参数对人机共驾汽车路径跟踪精度与侧向稳定性的影响.结果表明:恶劣工况下人机共驾汽车路径跟踪精度与侧向稳定性是相互耦合制约的,人机共驾汽车抵抗影响共驾效果因素的扰动能力越强,所设计的人机共驾车辆控制器性能越好.
中图分类号:
王宪彬, 包文龙, 李麟, 张英哲. 恶劣工况下人机共驾效果影响机理分析及应用[J]. 东北大学学报(自然科学版), 2025, 46(12): 66-77.
Xian-bin WANG, Wen-long BAO, Lin LI, Ying-zhe ZHANG. Mechanism Analysis and Application of Human-Machine Co-driving Effect Under Severe Driving Conditions[J]. Journal of Northeastern University(Natural Science), 2025, 46(12): 66-77.
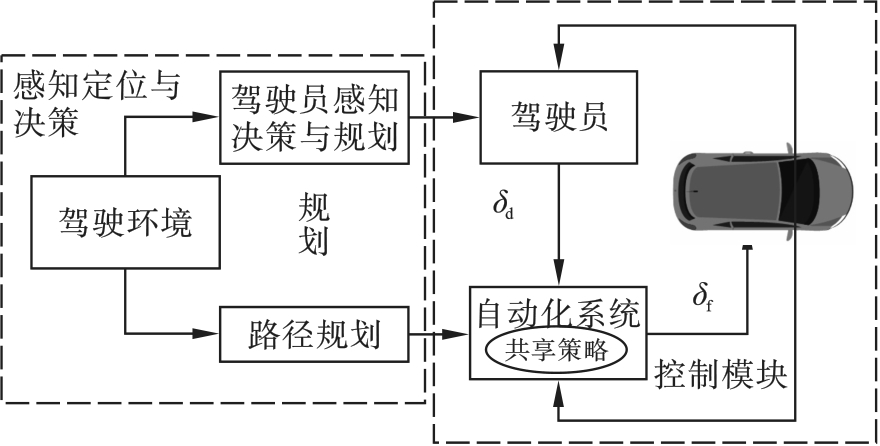
图1 双驾双控串联式人机共驾框架
Fig.1 Dual-driving and dual-control tandem human-machine co-driving framework
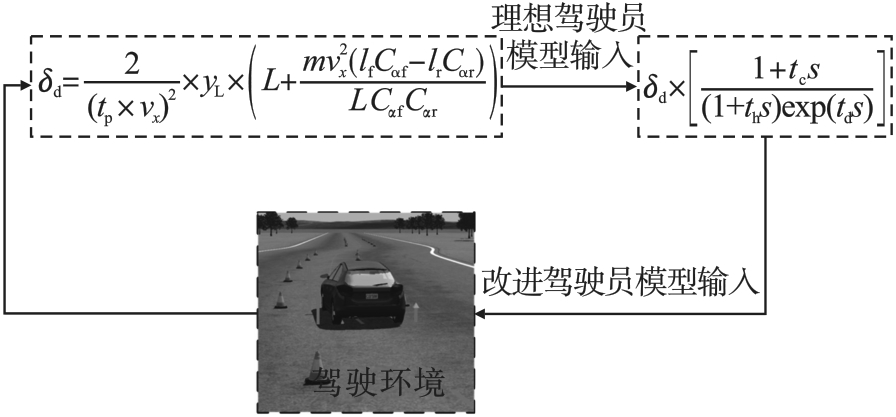
图2 改进的驾驶员模型
Fig.2 Improved driver model
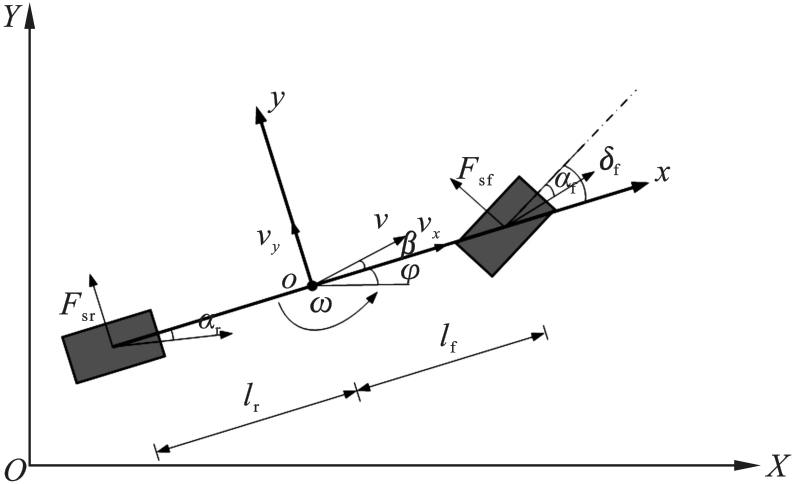
图3 车辆模型
Fig.3 Vehicle model
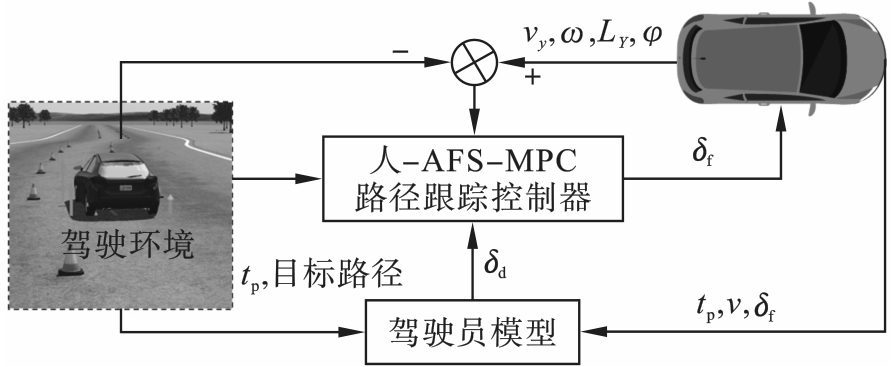
图4 人机共驾策略
Fig.4 Human-machine co-driving strategy
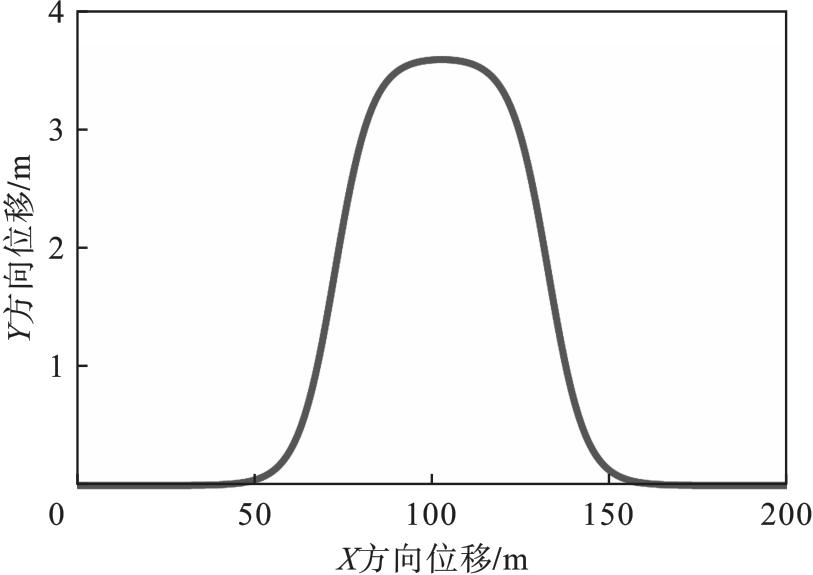
图5 参考轨迹
Fig.5 Reference trajectory
| 参数 | 数值 |
|---|---|
| 车辆质量 | 1 412 |
| 1.015 | |
| 1.895 | |
| -112 600 | |
| -94 568 | |
| 1 536.7 |
表1 车辆参数(以某款C级人机共驾轿车为例)
Table 1 Vehicle parameters (taking a certainC-class human-machine co-driving sedan as an example)
| 参数 | 数值 |
|---|---|
| 车辆质量 | 1 412 |
| 1.015 | |
| 1.895 | |
| -112 600 | |
| -94 568 | |
| 1 536.7 |
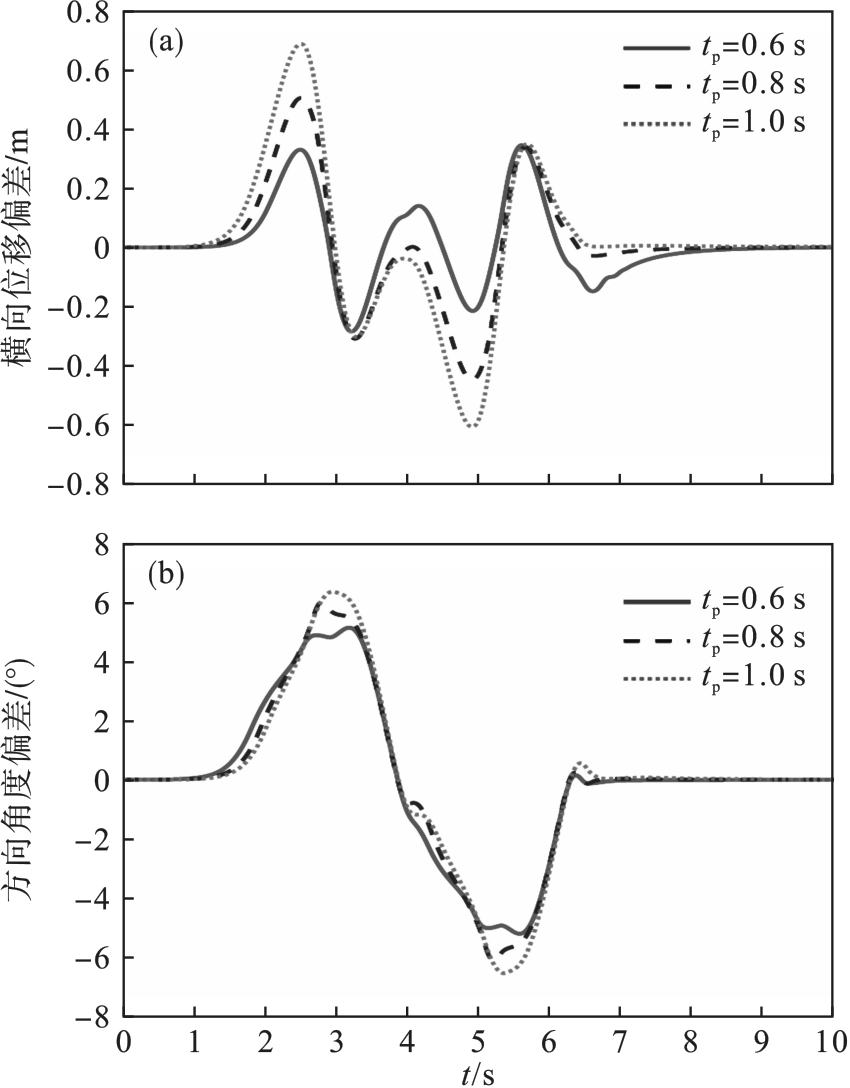
图6 不同预瞄时间下跟踪精度(a)—横向位移偏差; (b)—方向角度偏差.
Fig.6 Tracking accuracy at different preview time
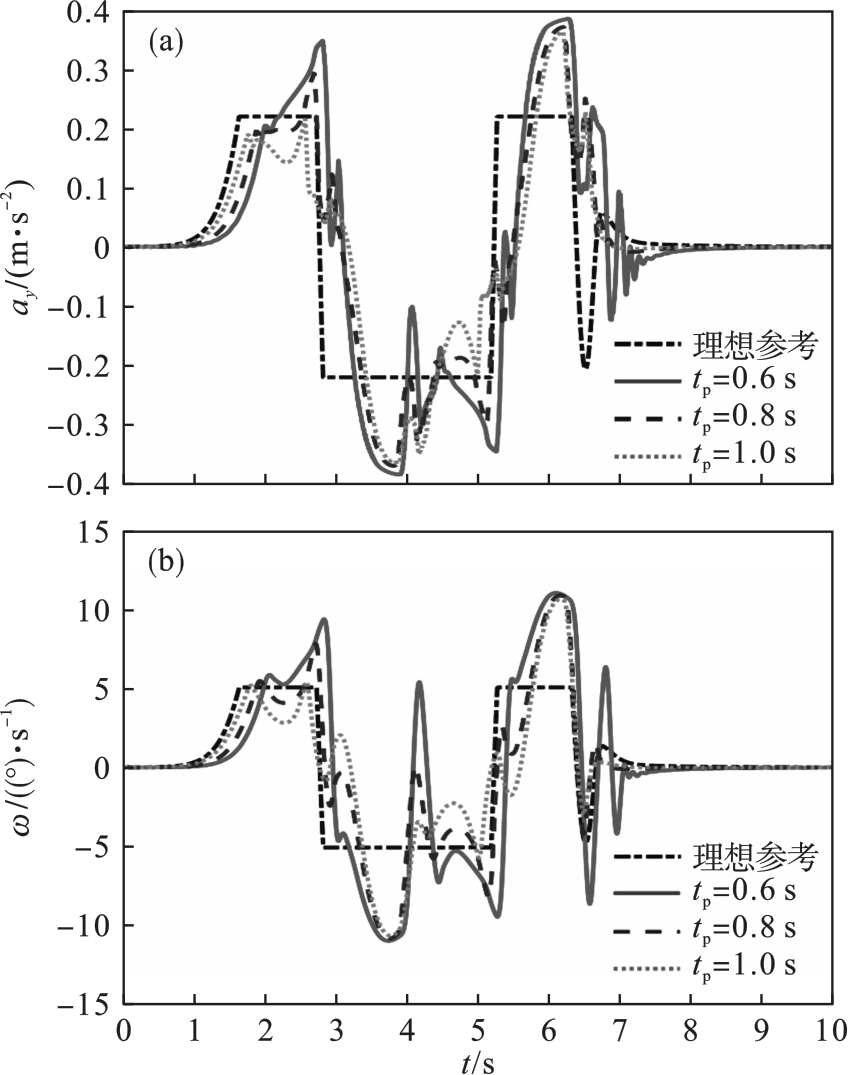
图7 不同预瞄时间下侧向稳定性(a)—横向加速度; (b)—横摆角速度.
Fig.7 Lateral stability at different preview time
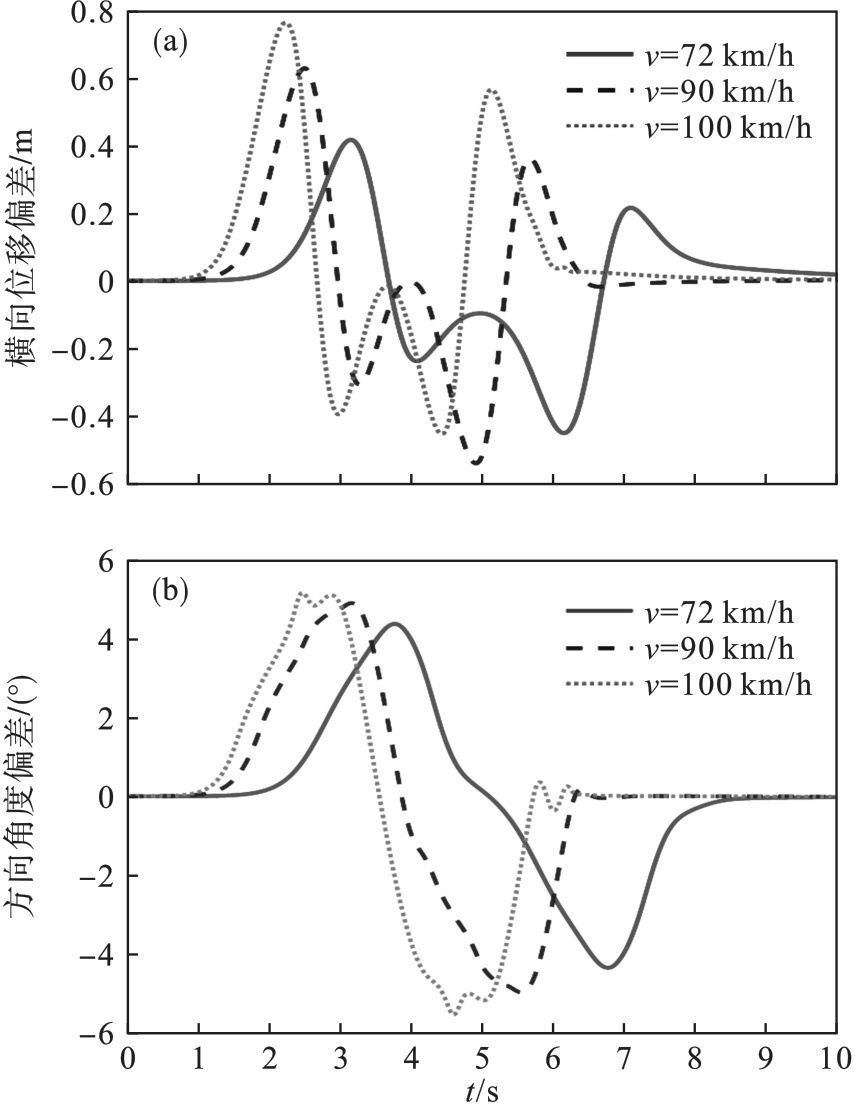
图8 不同车速下跟踪精度(a)—横向位移偏差; (b)—方向角度偏差.
Fig.8 Tracking accuracy at different speeds
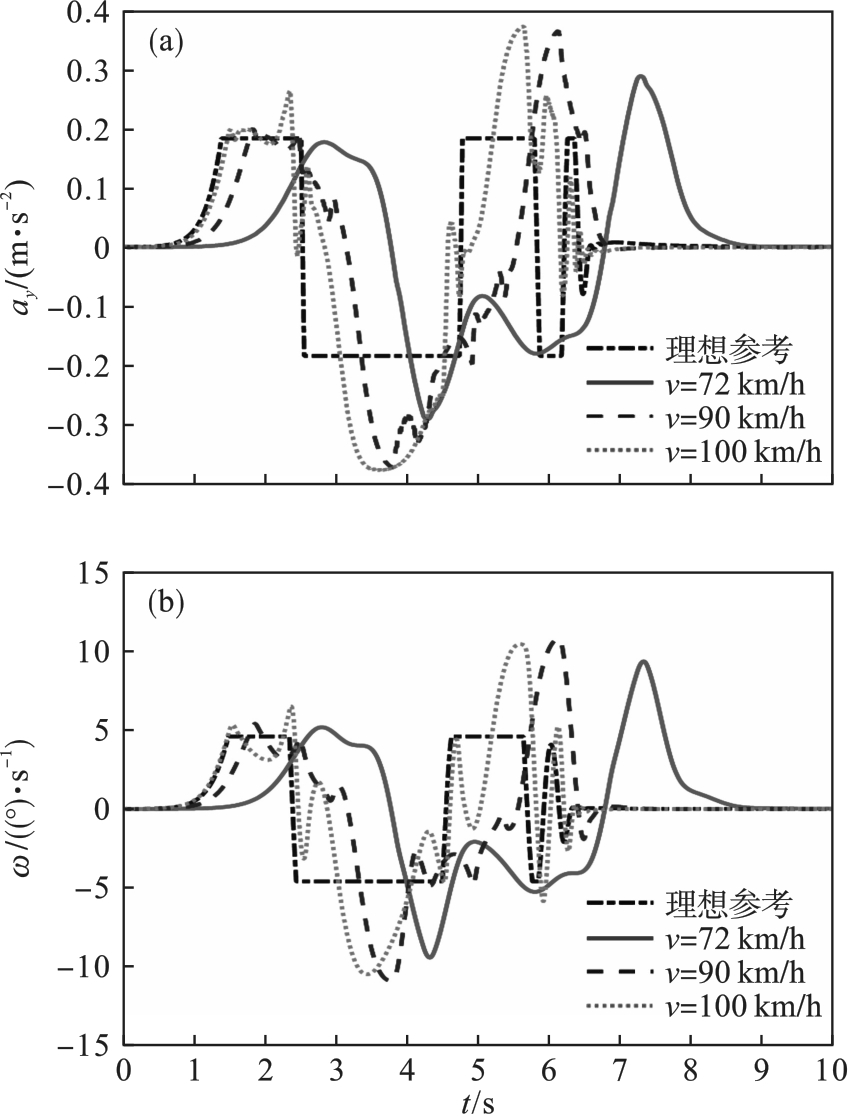
图9 不同车速下侧向稳定性(a)—横向加速度; (b)—横摆角速度.
Fig.9 Lateral stability at different speeds
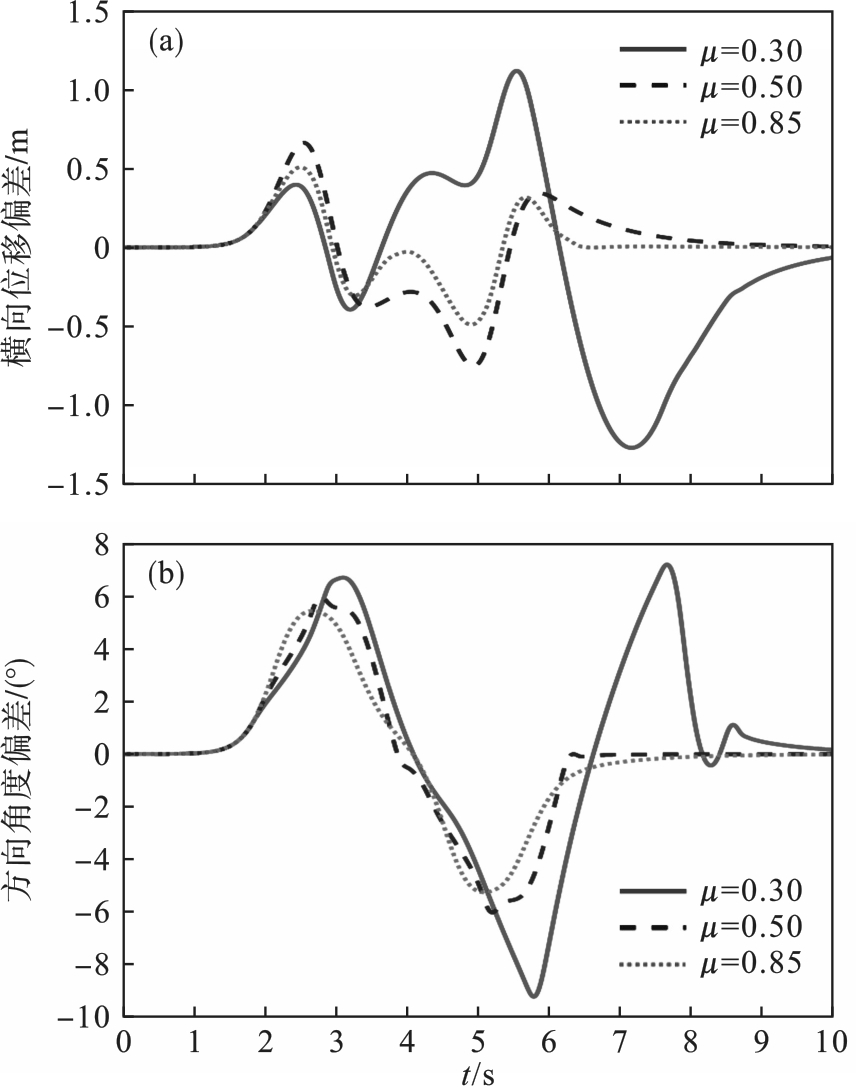
图10 不同路面附着系数下跟踪精度(a)—横向位移偏差; (b)—方向角度偏差.
Fig.10 Tracking accuracy under different road adhesion coefficients
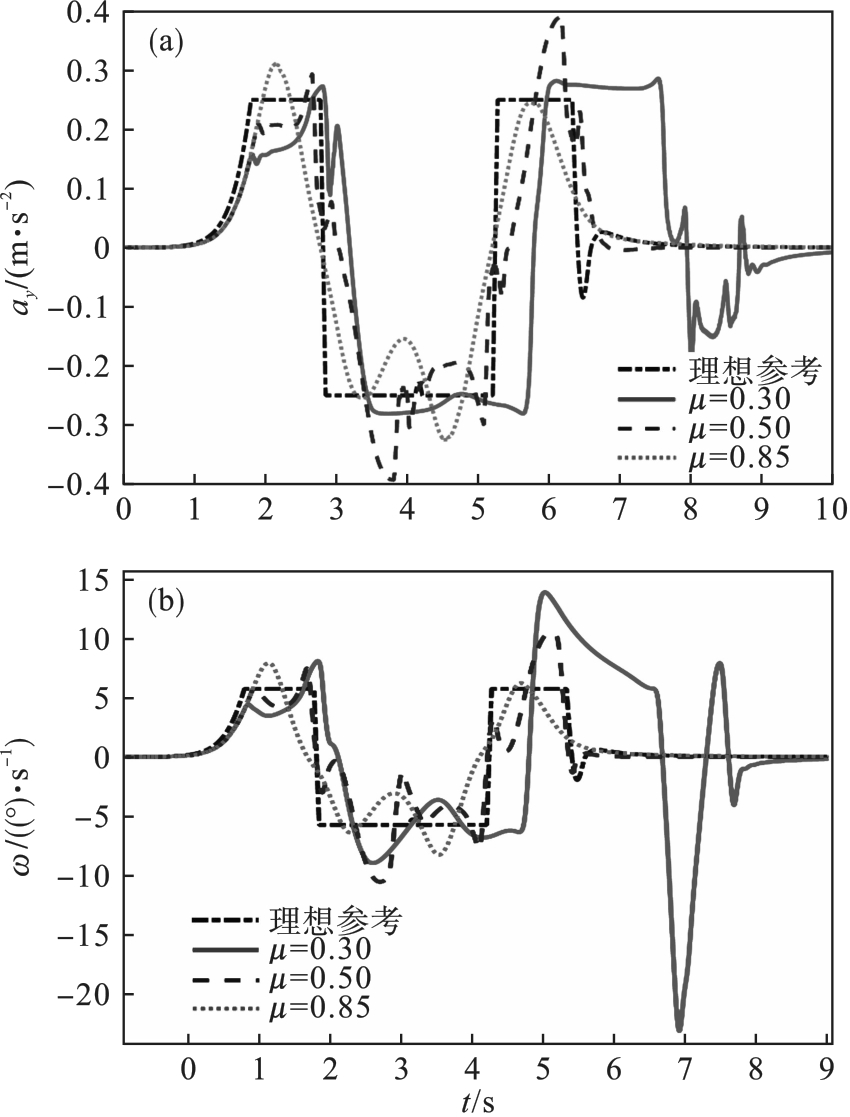
图11 不同路面附着系数下侧向稳定性(a)—横向加速度; (b)—横摆角速度.
Fig.11 Lateral stability under different road adhesion coefficients
| 参数 | 状态1 | 状态2 | 状态3 | 状态4 | 状态5 |
|---|---|---|---|---|---|
| 0.1 | 0.2 | 0.2 | 0.2 | 0.3 | |
| 0.1 | 0.1 | 0.2 | 0.2 | 0.2 | |
| 0.4 | 0.4 | 0.4 | 0.3 | 0.3 |
表2 驾驶员状态参数
Table 2 Driver state parameters
| 参数 | 状态1 | 状态2 | 状态3 | 状态4 | 状态5 |
|---|---|---|---|---|---|
| 0.1 | 0.2 | 0.2 | 0.2 | 0.3 | |
| 0.1 | 0.1 | 0.2 | 0.2 | 0.2 | |
| 0.4 | 0.4 | 0.4 | 0.3 | 0.3 |
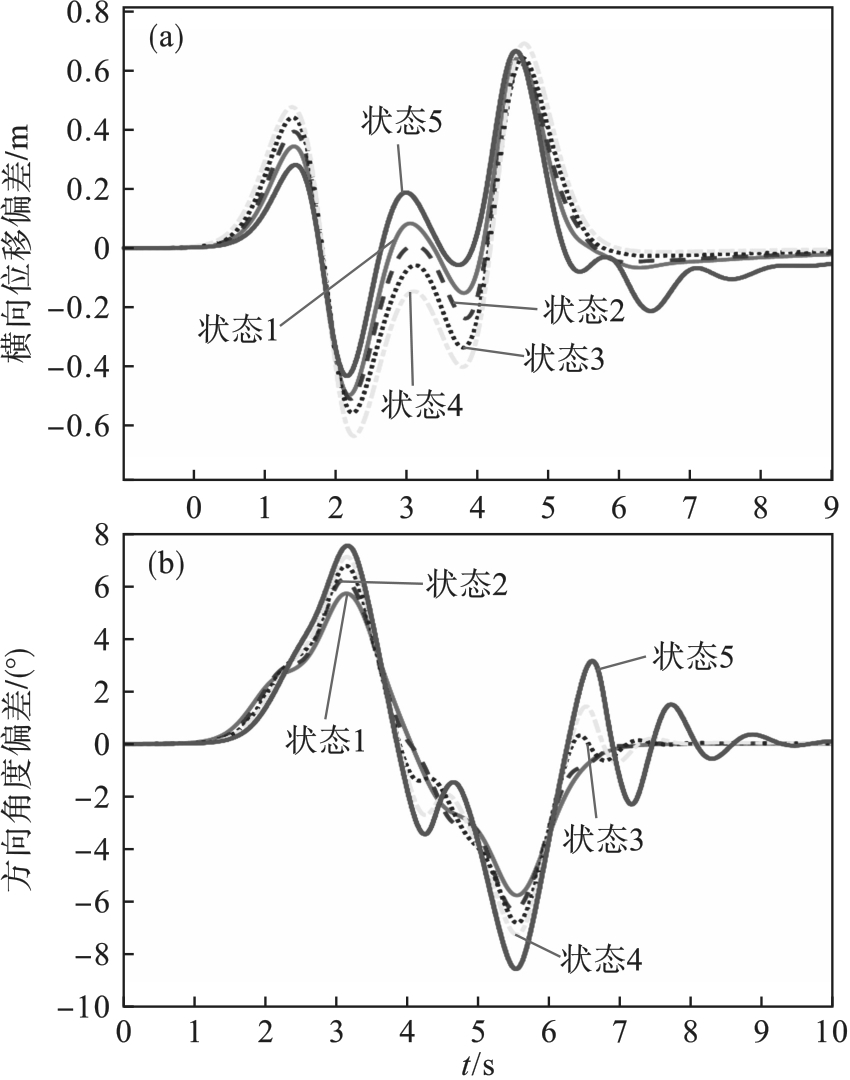
图12 不同驾驶员状态下跟踪精度(a)—横向位移偏差; (b)—方向角度偏差.
Fig.12 Tracking accuracy under different driver states
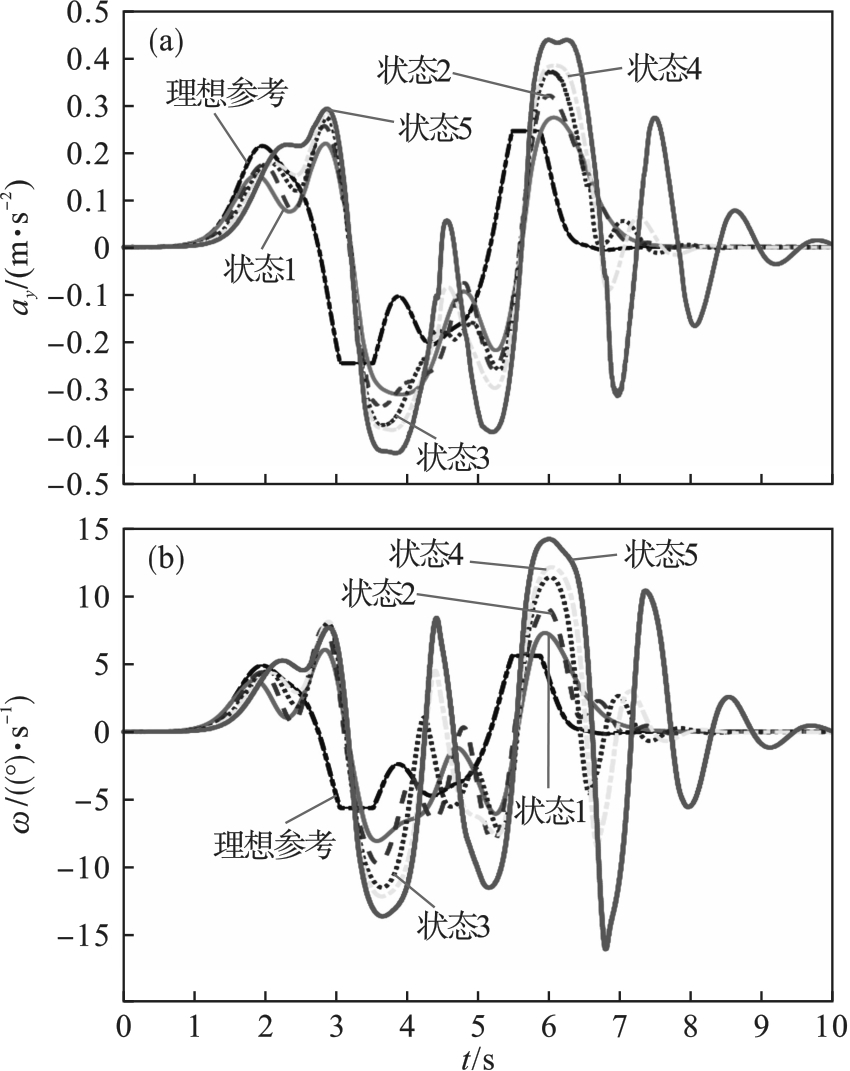
图13 不同驾驶员状态下侧向稳定性(a)—横向加速度; (b)—横摆角速度.
Fig.13 Lateral stability under different driver states
| 工况 | Np | Nc | 状态权重 Q | 控制权重 R |
|---|---|---|---|---|
| 工况1 | 80 | 60 | [1 0 0 0;0 1 0 0;0 0 2 0;0 0 0 5] | [ |
| 工况2 | 80 | 60 | [1 0 0 0;0 1 0 0;0 0 1 0;0 0 0 1] | [ |
| 工况3 | 80 | 60 | [2 0 0 0;0 5 0 0;0 0 1 0;0 0 0 1] | [ |
表 3 控制器参数
Table 3 Controller parameters
| 工况 | Np | Nc | 状态权重 Q | 控制权重 R |
|---|---|---|---|---|
| 工况1 | 80 | 60 | [1 0 0 0;0 1 0 0;0 0 2 0;0 0 0 5] | [ |
| 工况2 | 80 | 60 | [1 0 0 0;0 1 0 0;0 0 1 0;0 0 0 1] | [ |
| 工况3 | 80 | 60 | [2 0 0 0;0 5 0 0;0 0 1 0;0 0 0 1] | [ |
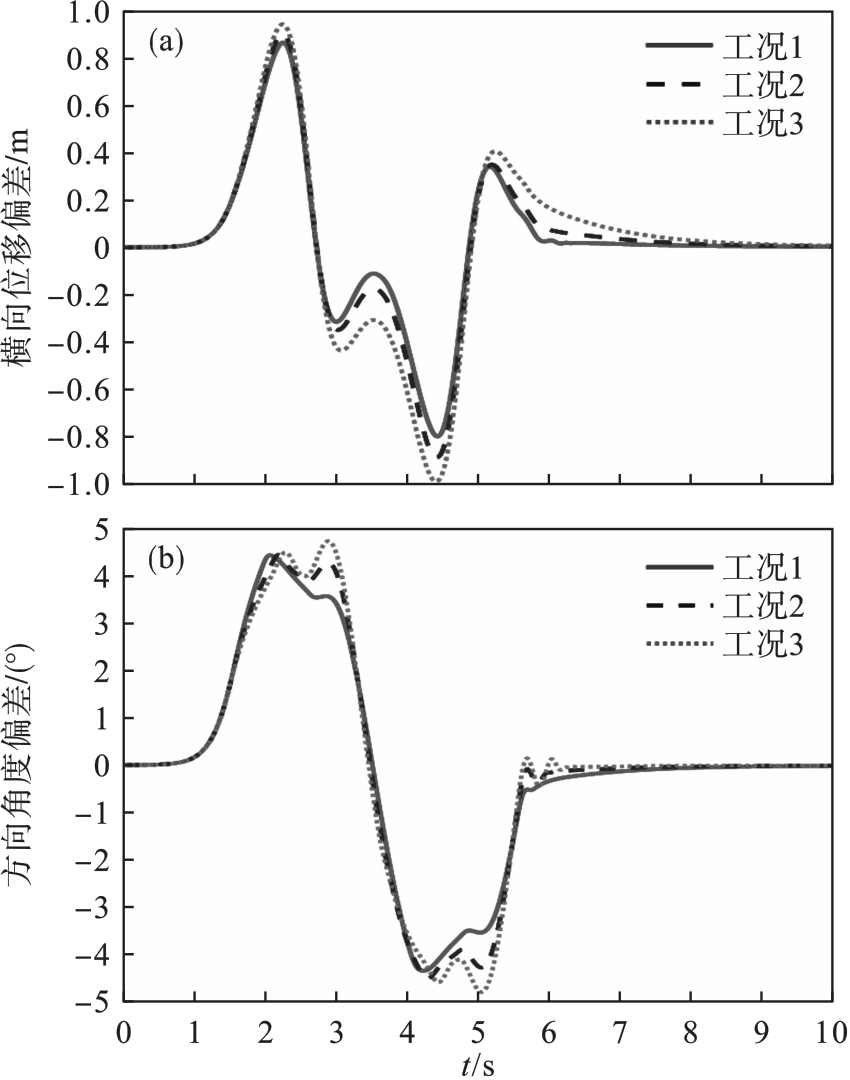
图14 不同控制器参数下跟踪精度(a)—横向位移偏差; (b)—方向角度偏差.
Fig.14 Tracking accuracy under different controller parameters
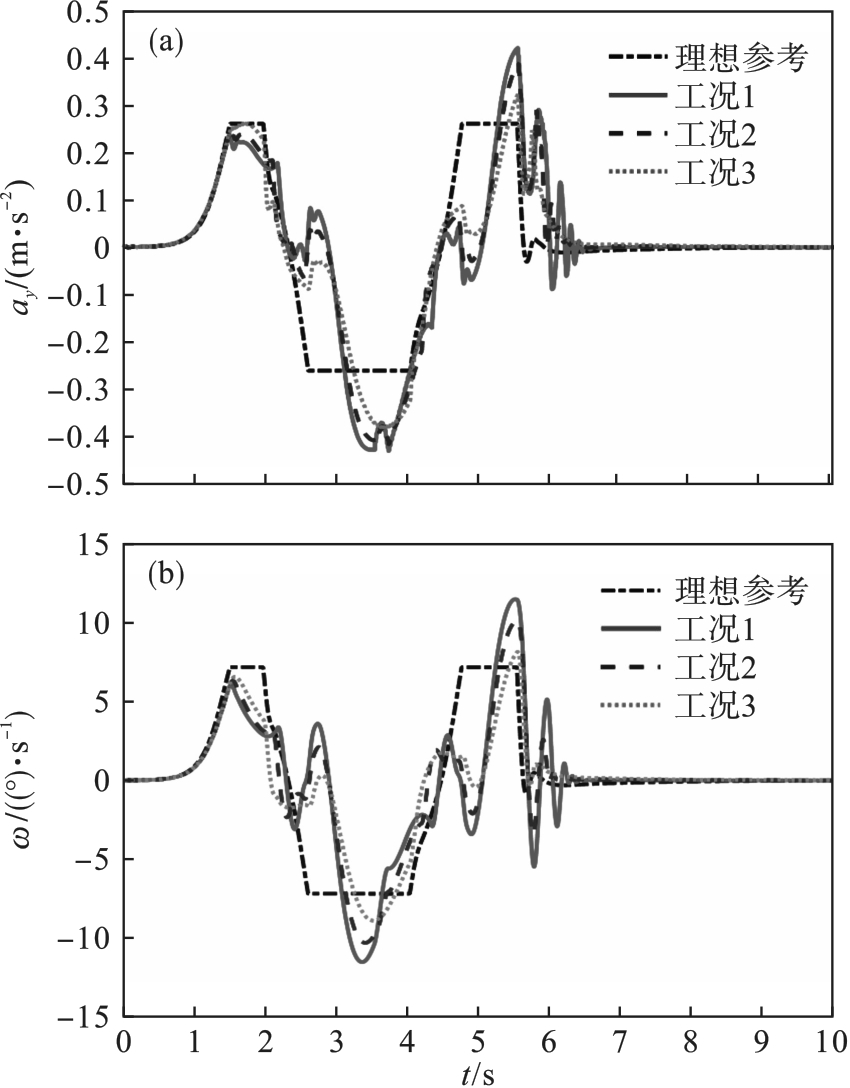
图15 不同控制器参数下侧向稳定性
Fig.15 Lateral stability under different controller parameters
控制器 参数工况 | 侧向位移误差 绝对值均值 | 方向角度误差 绝对值均值 | 侧向加速度误差 绝对值均值 | 横摆角速度 误差绝对值均值 |
|---|---|---|---|---|
| m | ( | m·s-2 | ( | |
| 工况1 | 0.169 7 | 1.386 0 | 0.853 | 1.988 7 |
| 工况2 | 0.194 7 | 1.441 6 | 0.839 | 1.828 5 |
| 工况3 | 0.236 7 | 1.468 7 | 0.834 | 1.719 2 |
表4 不同控制器参数的人机共驾效果对比
Table 4 Comparison of human-machine co-driving effects with different controller parameters
控制器 参数工况 | 侧向位移误差 绝对值均值 | 方向角度误差 绝对值均值 | 侧向加速度误差 绝对值均值 | 横摆角速度 误差绝对值均值 |
|---|---|---|---|---|
| m | ( | m·s-2 | ( | |
| 工况1 | 0.169 7 | 1.386 0 | 0.853 | 1.988 7 |
| 工况2 | 0.194 7 | 1.441 6 | 0.839 | 1.828 5 |
| 工况3 | 0.236 7 | 1.468 7 | 0.834 | 1.719 2 |
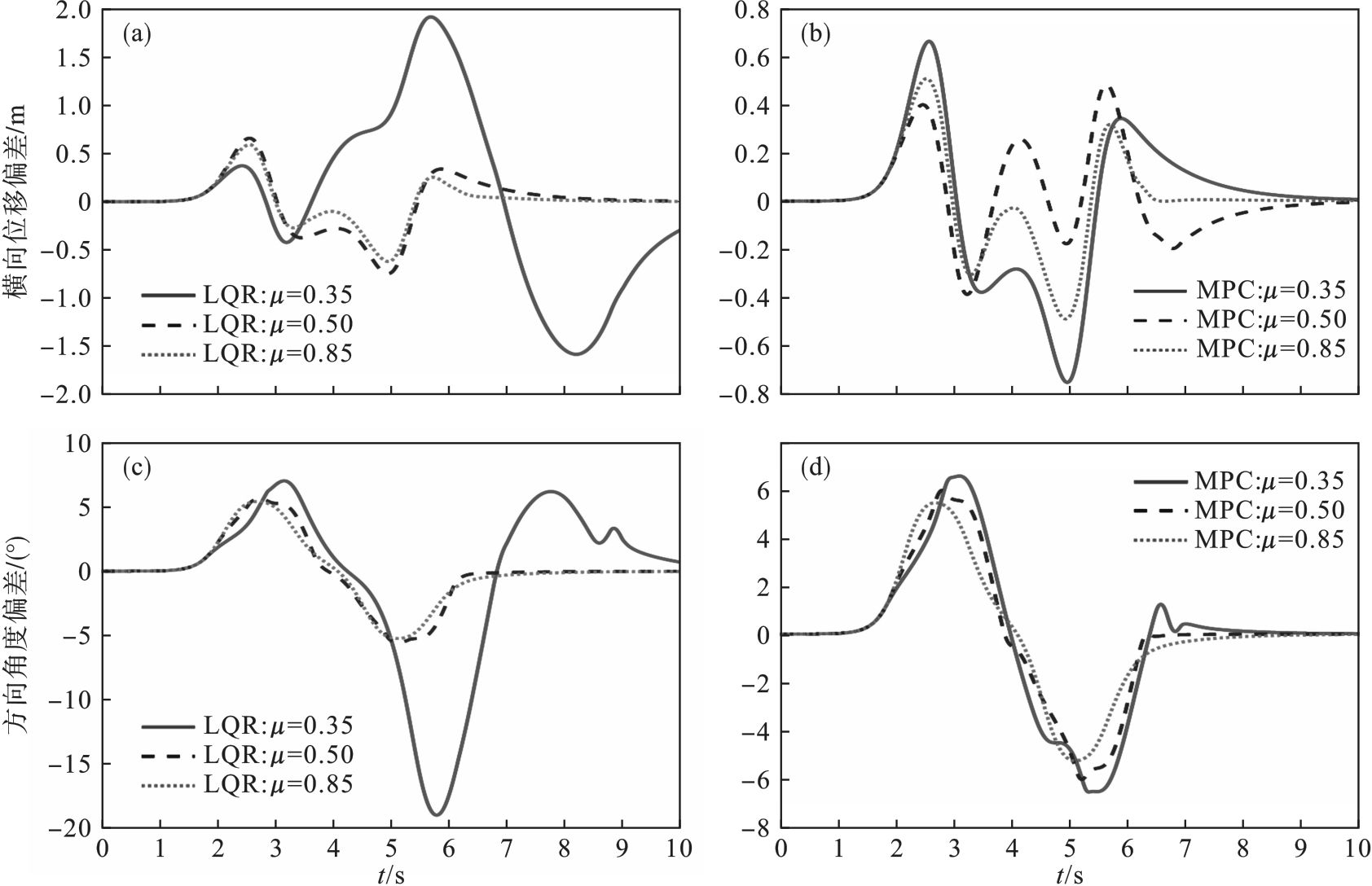
图16 抗路面附着系数扰动能力:跟踪精度(a)—基于LQR控制器的横向位移偏差; (b)—基于MPC控制器的横向位移偏差;(c)—基于LQR控制器的方向角度偏差; (d)—基于MPC控制器的方向角度偏差.
Fig.16 Resistance to road adhesion coefficient disturbance: tracking accuracy
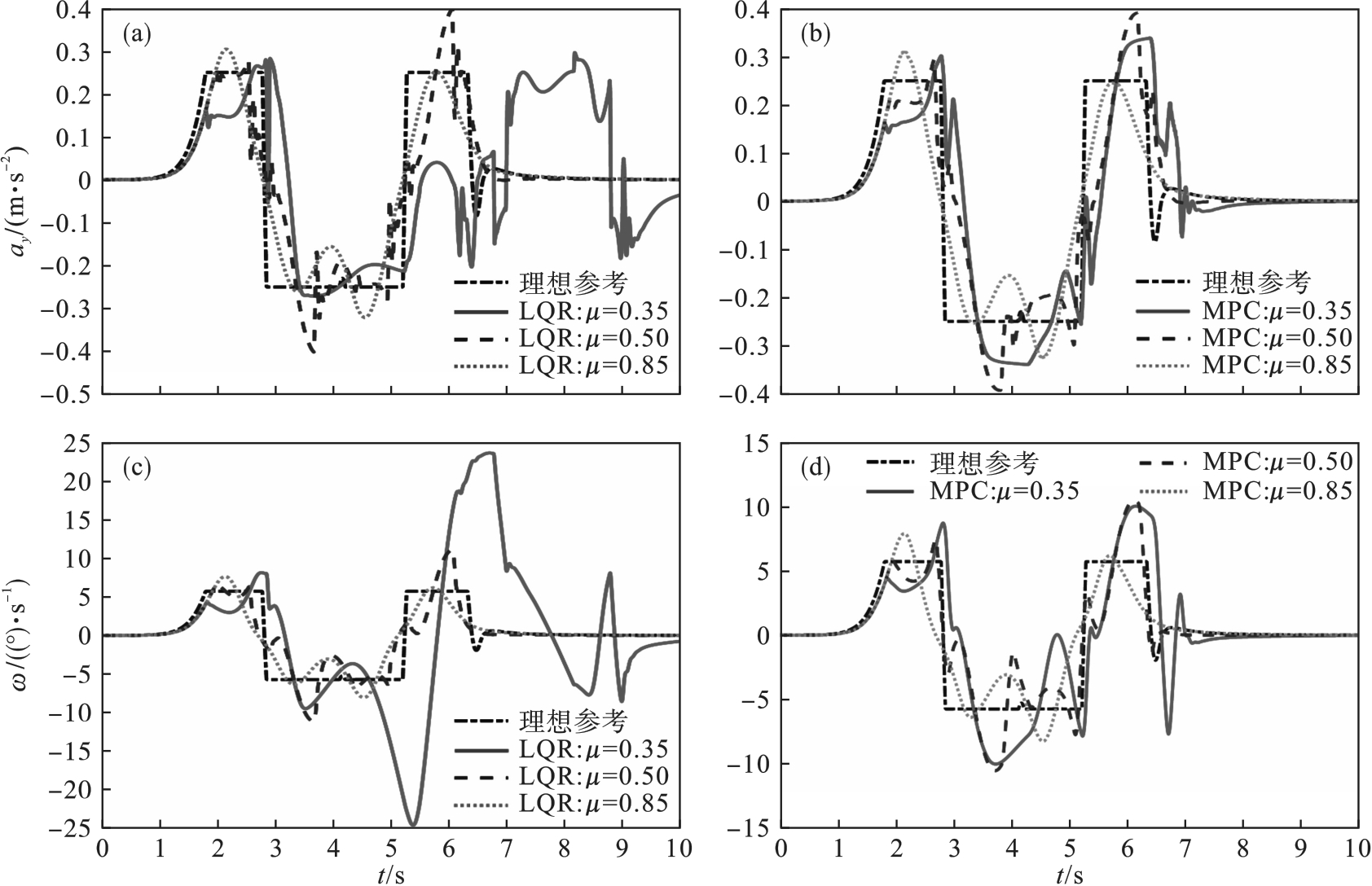
图17 抗路面附着系数扰动能力:侧向稳定性(a)—基于LQR控制器的横向加速度; (b)—基于MPC控制器的横向加速度;(c)—基于LQR控制器的横摆角速度; (d)—基于MPC控制器的横摆角速度.
Fig.17 Resistance to road adhesion coefficient disturbance: lateral stability
| [1] | Nunes A, Reimer B, Coughlin J F. People must retain control of autonomous vehicles [J].Nature, 2018, 556(7700): 169-171. |
| [2] | Zheng N N, Liu Z Y, Ren P J, et al. Hybrid-augmented intelligence: collaboration and cognition[J]. Frontiers of Information Technology & Electronic Engineering, 2017, 18(2): 153-179. |
| [3] | 熊璐, 杨兴, 卓桂荣, 等. 无人驾驶车辆的运动控制发展现状综述[J]. 机械工程学报, 2020, 56(10): 127-143. |
| Xiong Lu, Yang Xing, Zhuo Gui-rong, et al. Review on motion control of autonomous vehicles[J] Journal of Mechanical Engineering, 2020, 56(10): 127-143. | |
| [4] | Mars F, Chevrel P. Modelling human control of steering for the design of advanced driver assistance systems [J]. Annual Reviews in Control, 2017, 44: 292-302. |
| [5] | Flad M, Otten J, Schwab S, et al. Steering driver assistance system: a systematic cooperative shared control design approach[C]//2014 IEEE International Conference on Systems, Man, and Cybernetics(SMC).San Diego,2014: 3585–3592. |
| [6] | Na X, Cole D J. Game-theoretic modeling of the steering interaction between a human driver and a vehicle collision avoidance controller[J]. IEEE Transactions on Human-Machine Systems, 2015, 45(1): 25-38. |
| [7] | Na X, Cole D J. Linear quadratic game and non-cooperative predictive methods for potential application to modelling driver-AFS interactive steering control[J]. Vehicle System Dynamics, 2013, 51(2): 165-198. |
| [8] | Na X, Cole D J. Application of open-loop Stackelberg equilibrium to modeling a driver’s interaction with vehicle active steering control in obstacle avoidance[J]. IEEE Transactions on Human-Machine Systems, 2017, 47(5): 673-685. |
| [9] | 潘学军, 张兆惠. 基于模糊PID的智能汽车控制系统[J]. 控制工程, 2009, 16(5): 618-622. |
| Pan Xue-jun, Zhang Zhao-hui. Fuzzy PID control system for intelligent vehicle[J]. Control Engineering of China, 2009, 16(5): 618-622. | |
| [10] | 赵艳娥, 张建武. 基于滑模控制的四轮驱动电动汽车稳定性控制[J]. 上海交通大学学报, 2009, 43(10): 1526-1530. |
| Zhao Yan-e, Zhang Jian-wu. Stability control for a four-motor-wheel drive electric vehicle based on sliding mode control[J]. Journal of Shanghai Jiaotong University, 2009, 43(10): 1526-1530. | |
| [11] | 李炜, 吴麟麟, 汪若尘,等. 智能汽车路径跟踪精度及操纵稳定性耦合机理分析[J]. 汽车工程学报, 2021, 11(5): 346-353. |
| Li Wei, Wu Lin-lin, Wang Ruo-chen, et al. Mechanism analysis of the coupling between intelligent vehicle path tracking accuracy and steering stability[J]. Chinese Journal of Automotive Engineering, 2021, 11(5): 346-353. | |
| [12] | 刘瑞, 朱西产, 刘霖,等. 基于非合作模型预测控制的人机共驾策略[J]. 同济大学学报(自然科学版), 2019, 47(7): 1037-1045. |
| Liu Rui, Zhu Xi-chan, Liu Lin, et al. Cooperative driving strategy based on non-cooperative model predictive control[J]. Journal of Tongji University(Natural Science), 2019, 47(7): 1037-1045. | |
| [13] | Khosravani S, Khajepour A, Fidan B,et al. Development of a robust vehicle control with driver in the loop[C]// 2014 American Control Conference. Portland: IEEE, 2014:3482-3487. |
| [14] | Li R J, Li S B, Gao H B, et al. Effects of human adaptation and trust on shared control for driver automation cooperative driving [R]. Kunshan: Kunshan Economic and Technological Development Zone Management Committee, 2017. |
| [15] | Li R J, Li Y N, Li S E, et al. Driver-automation indirect shared control of highly automated vehicles with intention-aware authority transition [C] //2017 IEEE Intelligent Vehicles Symposium. Los Angeles, 2017: 26-32. |
| [16] | Liu J, Guo H Y, Song L H, et al. Driver-automation shared steering control for highly automated vehicles [J]. Science China Information Sciences, 2020, 63(9): 190201. |
| [17] | 郭孔辉. 驾驶员-汽车闭环系统操纵运动的预瞄最优曲率模型[J]. 汽车工程, 1984, 6(3): 1-16. |
| Guo Kong-hui. Drivers-vehicle close-loop simulation of handling by preselect optimal curvature method [J]. Automotive Engineering, 1984, 6(3): 1-16. | |
| [18] | 陈无畏, 谈东奎, 汪洪波,等. 一类基于轨迹预测的驾驶员方向控制模型[J]. 机械工程学报, 2016, 52(14): 106-115. |
| Chen Wu-wei, Tan Dong-kui, Wang Hong-bo, et al. A class of driver directional control model based on trajectory prediction[J]. Journal of Mechanical Engineering, 2016, 52(14): 106-115. | |
| [19] | Falcone P, Borrelli F, Asgari J, et al. Predictive active steering control for autonomous vehicle systems [J]. IEEE Transactions on Control Systems Technology, 2007, 15(3): 566-580. |
| [20] | 余志生. 汽车理论 [M].5版. 北京: 机械工业出版社, 2009. |
| Yu Zhi-sheng. Automobile theory [M].5th ed. Beijing: China Machine Press,2009. | |
| [21] | Rajamani R .Vehicle dynamics and control[M].Boston: Springer,2012. |
| [22] | 郭孔辉, 马凤军, 孔繁森. 人-车-路闭环系统驾驶员模型参数辨识[J]. 汽车工程, 2002, 24(1): 20-24. |
| Guo Kong-hui, Ma Feng-jun, Kong Fan-sen. Driver model parameter identification of the driver-vehicle-road closed-loop system[J]. Automotive Engineering, 2002, 24(1): 20-24. |
| [1] | 李倩雯, 孟庆有, 袁致涛, 齐赛男. 羟肟酸捕收剂对钛铁矿和钛辉石的浮选效果及作用机理[J]. 东北大学学报(自然科学版), 2025, 46(6): 138-146. |
| [2] | 李刚, 张修鹏, 常伟达, 周伟. 高温条件下NCM锂离子电池热失控释放气体的爆炸特性[J]. 东北大学学报(自然科学版), 2025, 46(4): 78-86. |
| [3] | 赵鑫鑫, 李兵, 杨珏. 非公路车辆混动变速器切换过程可拓优化控制[J]. 东北大学学报(自然科学版), 2025, 46(3): 106-114. |
| [4] | 王宏伟, 张晴晴, 汪洵. 基于快速模型预测控制的重型车辆侧翻稳定性研究[J]. 东北大学学报(自然科学版), 2025, 46(11): 12-18. |
| [5] | 唐传茵, 潘律, 李静红, 章明理. 考虑稳定边界和侧倾稳定的车辆路径跟踪控制[J]. 东北大学学报(自然科学版), 2024, 45(8): 1123-1134. |
| [6] | 苏卫星, 薛凤, 温永刚, 刘芳. 面向人机共驾决策的实时驾驶能力评价算法[J]. 东北大学学报(自然科学版), 2023, 44(8): 1078-1088. |
| [7] | 李寿涛, 魏玉博, 李秋媛, 于丁力. 考虑车辆侧偏刚度变化的MPC稳定性控制方法[J]. 东北大学学报(自然科学版), 2023, 44(2): 162-167. |
| [8] | 唐传茵, 赵懿峰, 赵亚峰, 周淑文. 智能车辆轨迹跟踪控制方法研究[J]. 东北大学学报:自然科学版, 2020, 41(9): 1297-1303. |
| [9] | 王永刚;柴天佑;. 蒸发过程的非线性模型预测控制[J]. 东北大学学报(自然科学版), 2008, 29(10): 1369-1372. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||