Journal of Northeastern University(Natural Science) ›› 2024, Vol. 45 ›› Issue (7): 974-983.DOI: 10.12068/j.issn.1005-3026.2024.07.009
• Mechanical Engineering • Previous Articles Next Articles
Quan SHAN( ), Shun ZHANG, Jian-cong HUANG, Yan CHEN
), Shun ZHANG, Jian-cong HUANG, Yan CHEN
Received:2023-03-15
Online:2024-07-15
Published:2024-10-29
Contact:
Quan SHAN
About author:SHAN QuanE-mail:shanquan@neuq.edu.cnCLC Number:
Quan SHAN, Shun ZHANG, Jian-cong HUANG, Yan CHEN. Research on Fuzzy Adaptive Interactive Control of Upper Limb Rehabilitation Robots[J]. Journal of Northeastern University(Natural Science), 2024, 45(7): 974-983.
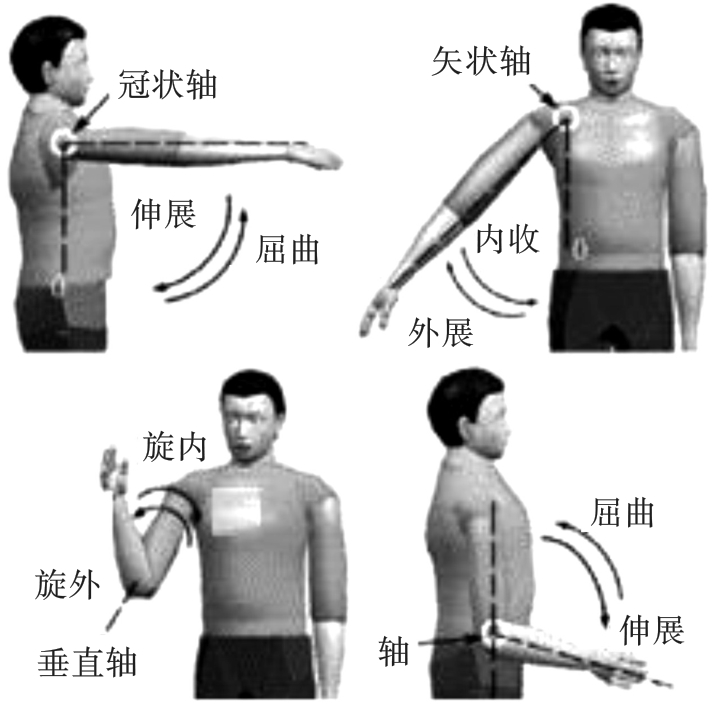
Fig.1 Schematic diagram of shoulder and elbow joint movement
| 关节 | 运动类型 | 角度/(°) |
|---|---|---|
| 肩关节 | 屈曲 | 0~180 |
| 伸展 | 0~50 | |
| 外展 | 0~60 | |
| 内收 | 0~45 | |
| 肘关节 | 旋外 | 0~80 |
| 旋内 | 0~100 | |
| 屈曲 | 0~145 | |
| 伸展 | 0~5 |
Table1 Range of shoulder and elbow jointmotion
| 关节 | 运动类型 | 角度/(°) |
|---|---|---|
| 肩关节 | 屈曲 | 0~180 |
| 伸展 | 0~50 | |
| 外展 | 0~60 | |
| 内收 | 0~45 | |
| 肘关节 | 旋外 | 0~80 |
| 旋内 | 0~100 | |
| 屈曲 | 0~145 | |
| 伸展 | 0~5 |
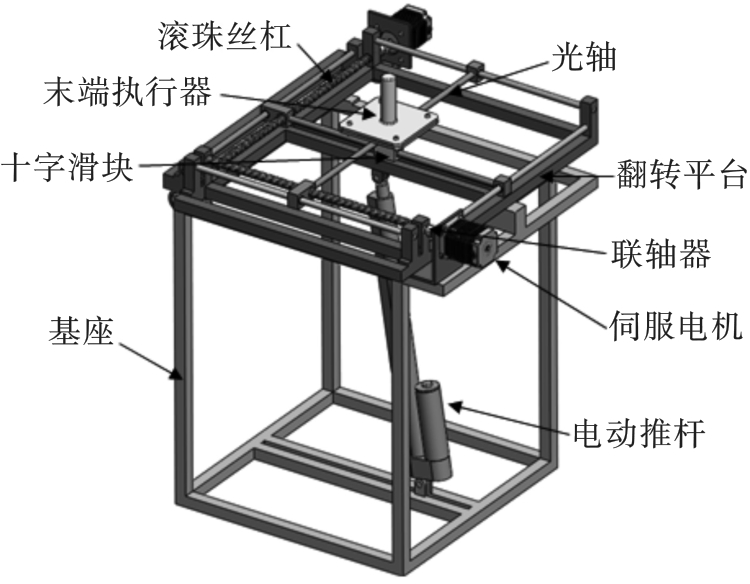
Fig. 2 Upper limb rehabilitation robot model
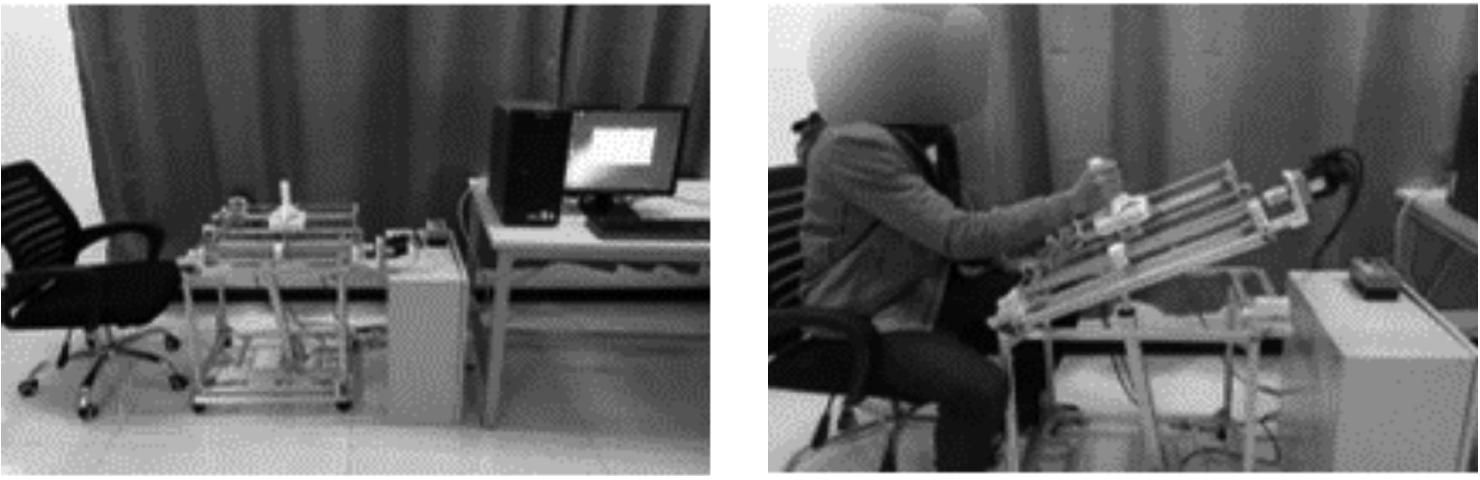
Fig.3 Upper limb rehabilitation robot prototype and human?machine interaction demonstration
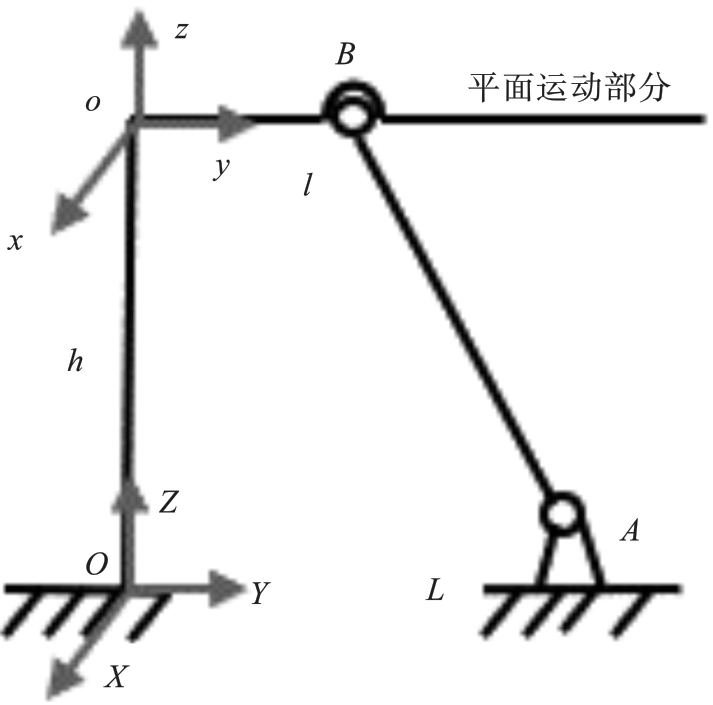
Fig.4 Schematic diagram of the upper limb rehabilitation robot
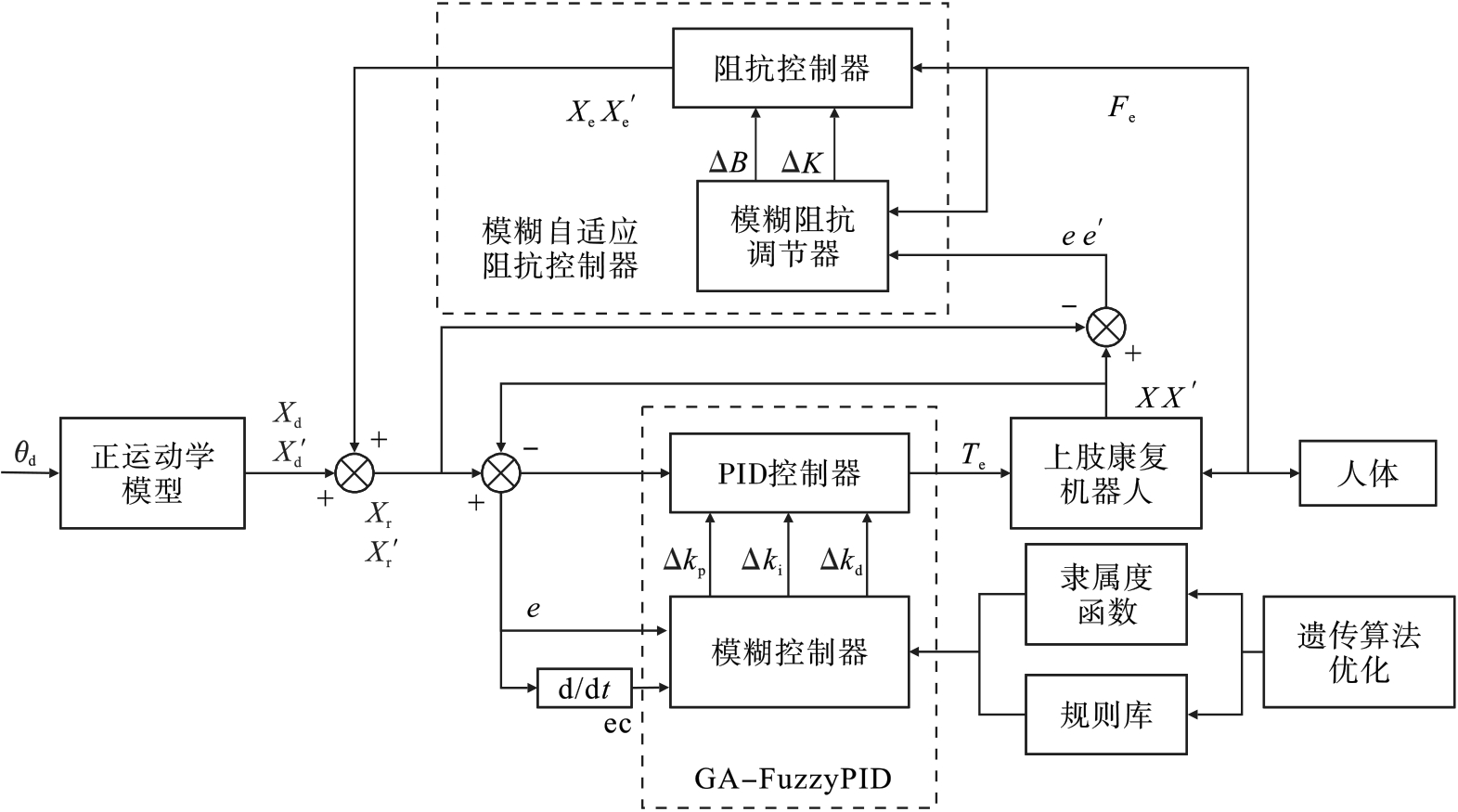
Fig.5 Schematic diagram of the fuzzy adaptive interactive control system
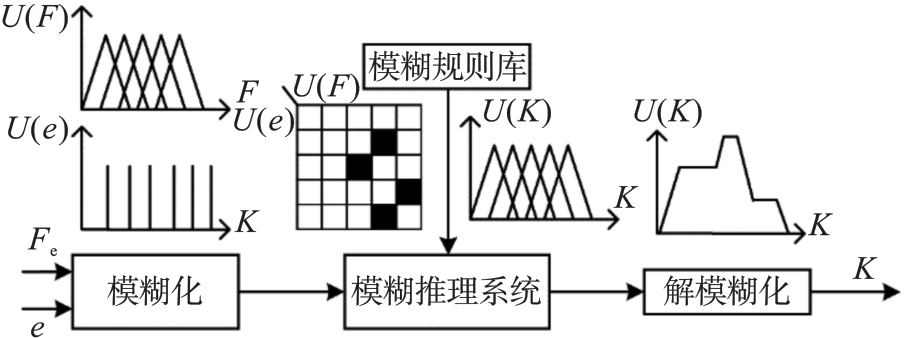
Fig.6 Fuzzy rule schematic
| e | Fe | ||||
|---|---|---|---|---|---|
| NL | NS | ZE | PS | PL | |
| NL | NL | NL | NS | ZE | ZE |
| NS | NL- | NS | NS | ZE | PS |
| ZE | NS | NS | ZE | PS | PS |
| PS | NS | ZE | PS | PS | PL |
| PL | ZE | ZE | PS | PL | PL |
Table2 Fuzzy rule table of stiffness parameters
| e | Fe | ||||
|---|---|---|---|---|---|
| NL | NS | ZE | PS | PL | |
| NL | NL | NL | NS | ZE | ZE |
| NS | NL- | NS | NS | ZE | PS |
| ZE | NS | NS | ZE | PS | PS |
| PS | NS | ZE | PS | PS | PL |
| PL | ZE | ZE | PS | PL | PL |
| e′ | Fe | ||||
|---|---|---|---|---|---|
| NL | NS | ZE | PS | PL | |
| NL | NL | NS | NS | ZE | PS |
| NS | NL | NS | NS | ZE | PS |
| ZE | NS | ZE | ZE | PS | PL |
| PS | NS | ZE | PS | PS | PL |
| PL | NS | PS | PS | PL | PL |
Table3 Fuzzy rule table of damping parameters
| e′ | Fe | ||||
|---|---|---|---|---|---|
| NL | NS | ZE | PS | PL | |
| NL | NL | NS | NS | ZE | PS |
| NS | NL | NS | NS | ZE | PS |
| ZE | NS | ZE | ZE | PS | PL |
| PS | NS | ZE | PS | PS | PL |
| PL | NS | PS | PS | PL | PL |
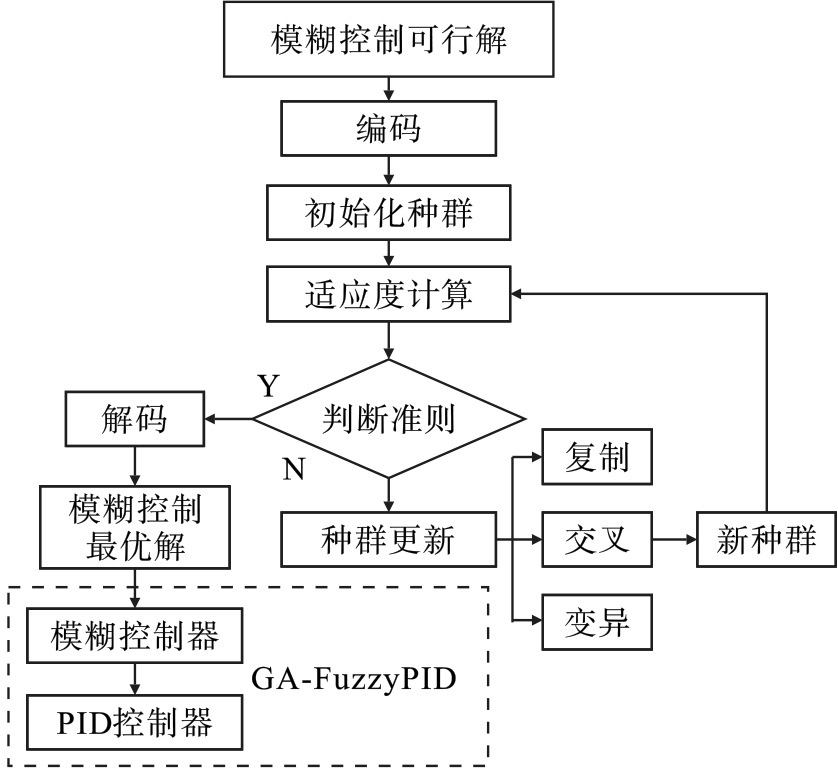
Fig.7 Flowchart of fuzzy rule optimization by genetic algorithm
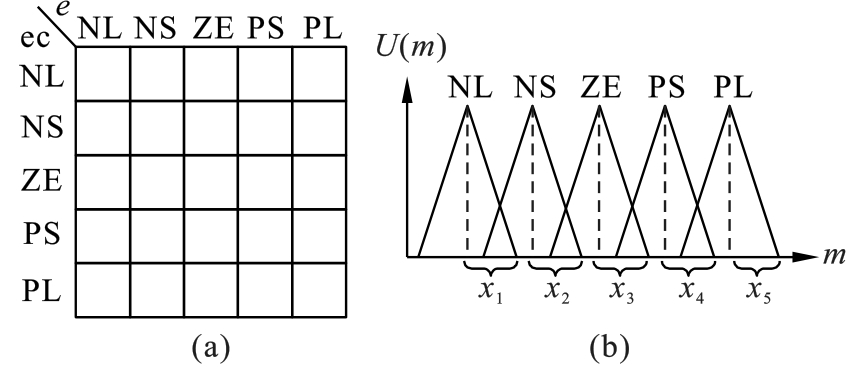
Fig.8 Fuzzy rules
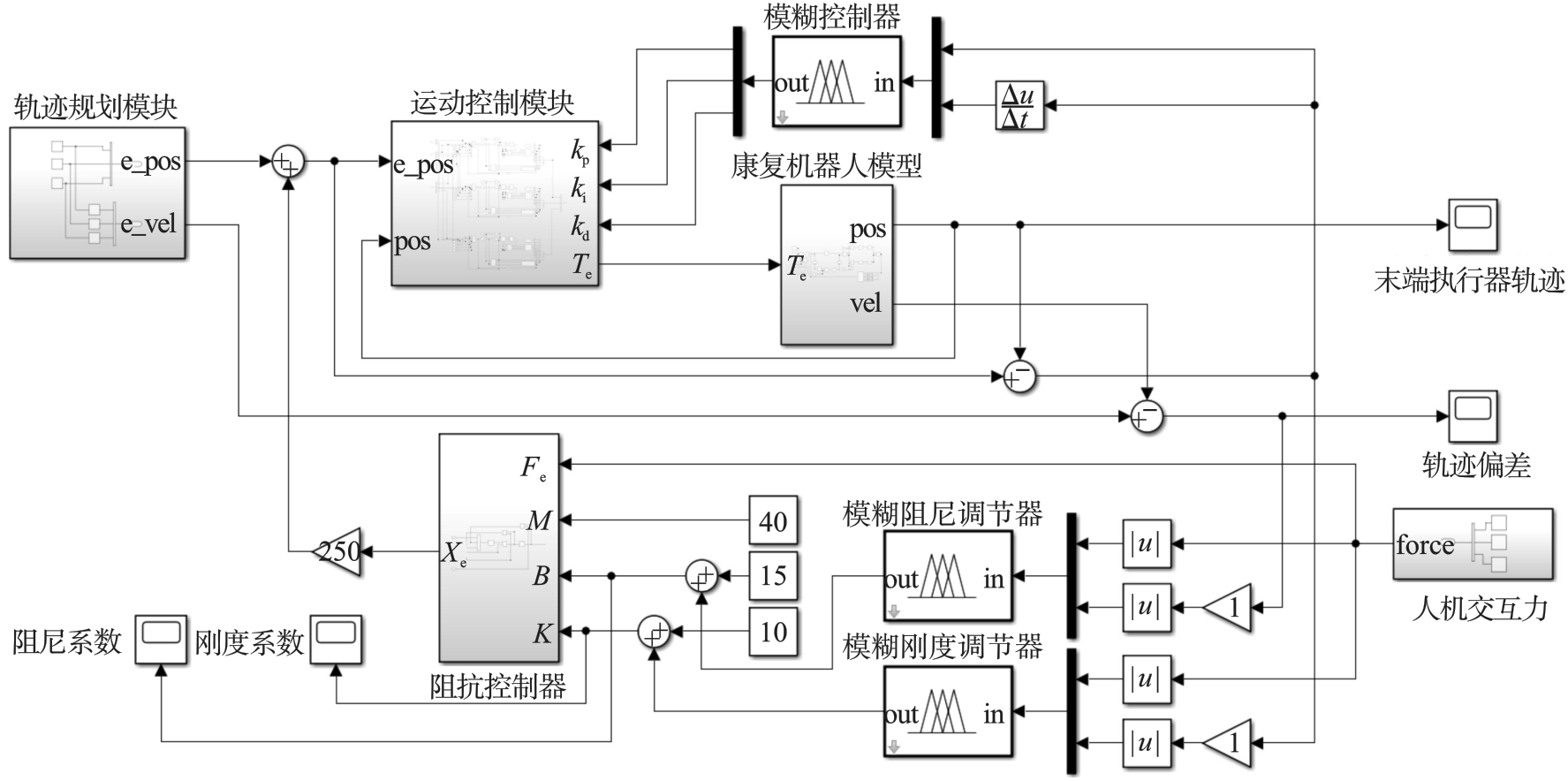
Fig.9 Simulation model of the adaptive interactive control system
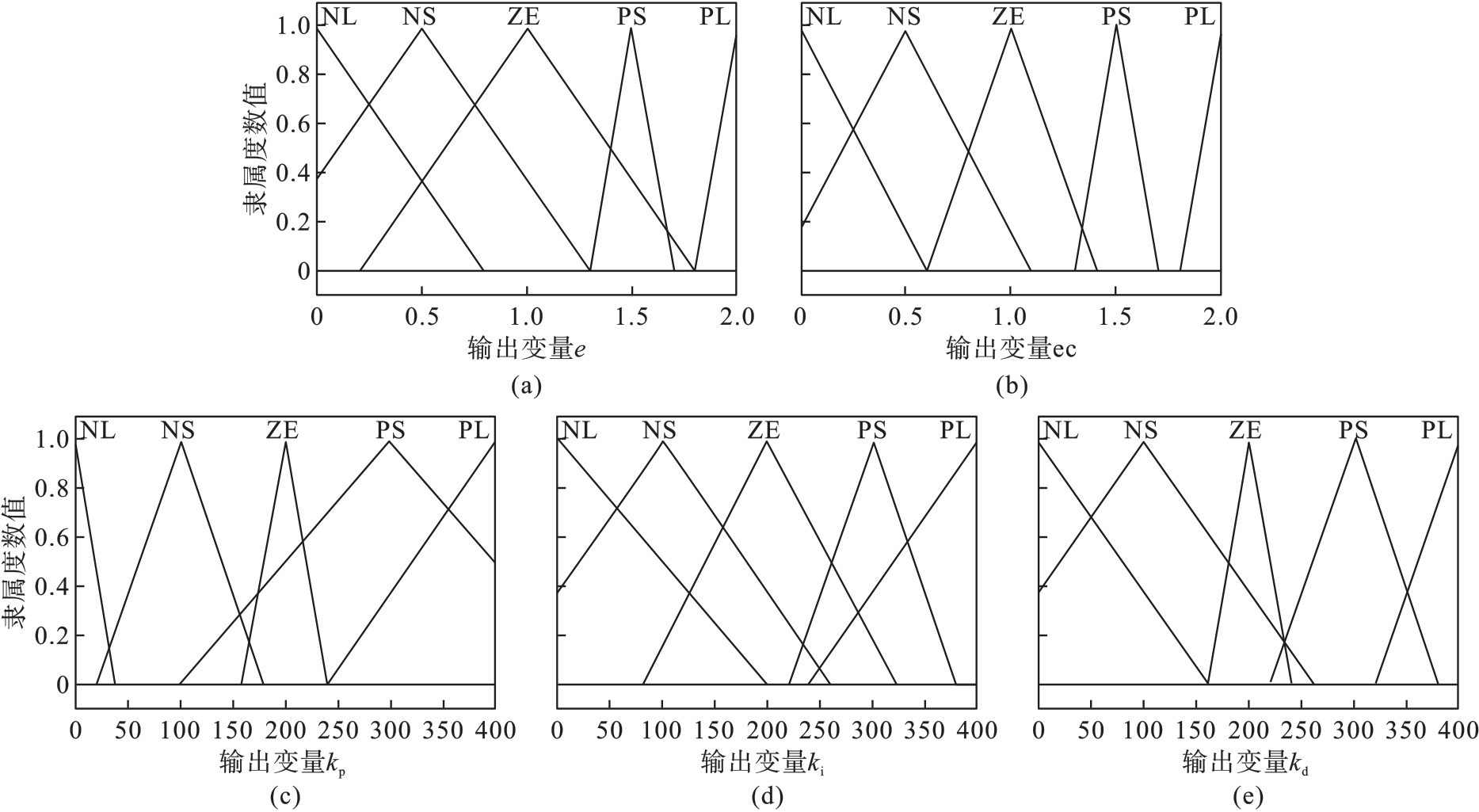
Fig.10 Optimal membership curves
| ec | e | ||||
|---|---|---|---|---|---|
| NL | NS | ZE | PS | PL | |
| NL | ZE | PL | PL | ZE | NL |
| NS | PS | NL | ZE | PL | PL |
| ZE | PS | PS | NS | ZE | PS |
| PS | NL | NS | ZE | PS | PS |
| PL | NL | NS | ZE | ZE | ZE |
Table 4 kp fuzzy rule base
| ec | e | ||||
|---|---|---|---|---|---|
| NL | NS | ZE | PS | PL | |
| NL | ZE | PL | PL | ZE | NL |
| NS | PS | NL | ZE | PL | PL |
| ZE | PS | PS | NS | ZE | PS |
| PS | NL | NS | ZE | PS | PS |
| PL | NL | NS | ZE | ZE | ZE |
| ec | e | ||||
|---|---|---|---|---|---|
| NL | NS | ZE | PS | PL | |
| NL | NS | PS | NS | ZE | PL |
| NS | NL | ZE | NL | PS | PL |
| ZE | ZE | PS | ZE | NS | NL |
| PS | PS | PS | PS | NS | PL |
| PL | PS | PL | PL | PL | PS |
Table 5 ki fuzzy rule base
| ec | e | ||||
|---|---|---|---|---|---|
| NL | NS | ZE | PS | PL | |
| NL | NS | PS | NS | ZE | PL |
| NS | NL | ZE | NL | PS | PL |
| ZE | ZE | PS | ZE | NS | NL |
| PS | PS | PS | PS | NS | PL |
| PL | PS | PL | PL | PL | PS |
| ec | e | ||||
|---|---|---|---|---|---|
| NL | NS | ZE | PS | PL | |
| NL | NS | PS | PL | ZE | PL |
| NS | NS | NS | PS | NS | PL |
| ZE | NL | ZE | PS | PS | NS |
| PS | PS | PS | ZE | ZE | ZE |
| PL | ZE | PL | PS | ZE | NS |
Table6 kd fuzzy rule base
| ec | e | ||||
|---|---|---|---|---|---|
| NL | NS | ZE | PS | PL | |
| NL | NS | PS | PL | ZE | PL |
| NS | NS | NS | PS | NS | PL |
| ZE | NL | ZE | PS | PS | NS |
| PS | PS | PS | ZE | ZE | ZE |
| PL | ZE | PL | PS | ZE | NS |
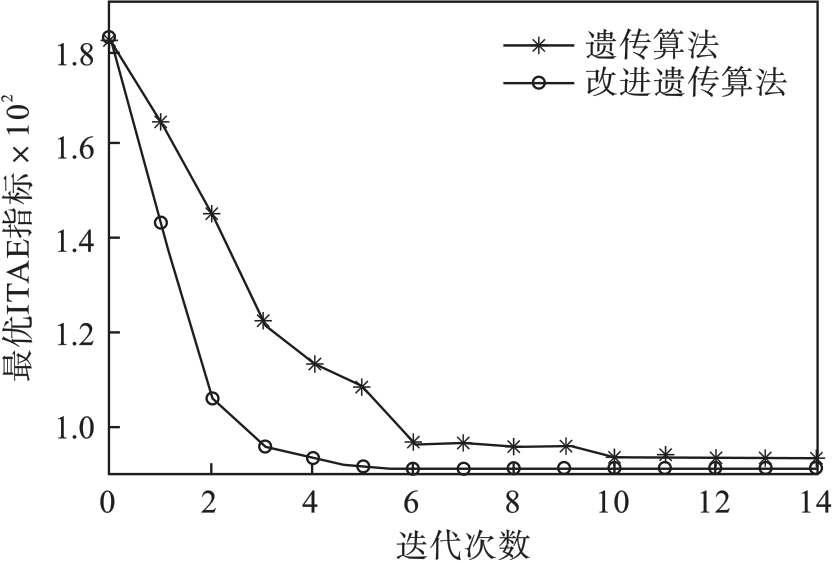
Fig.11 Iterative comparison of genetic algorithms
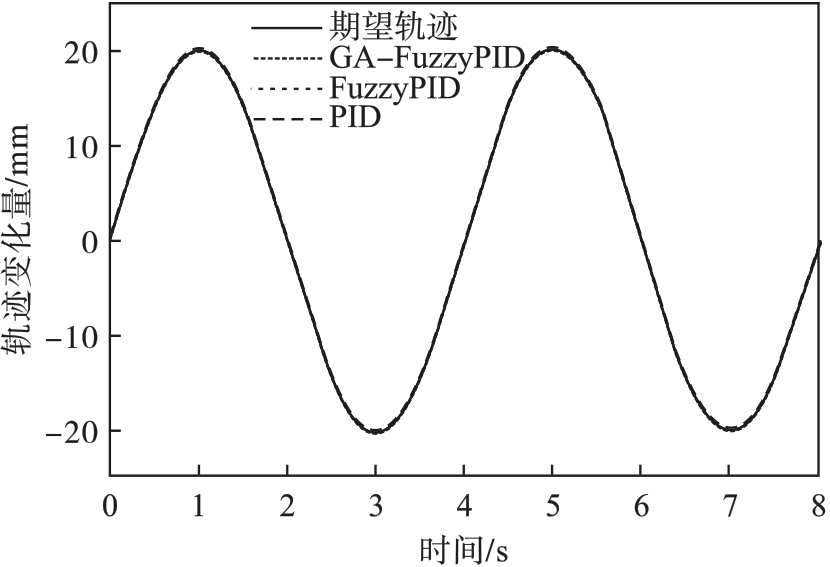
Fig.12 Trajectory tracking curve
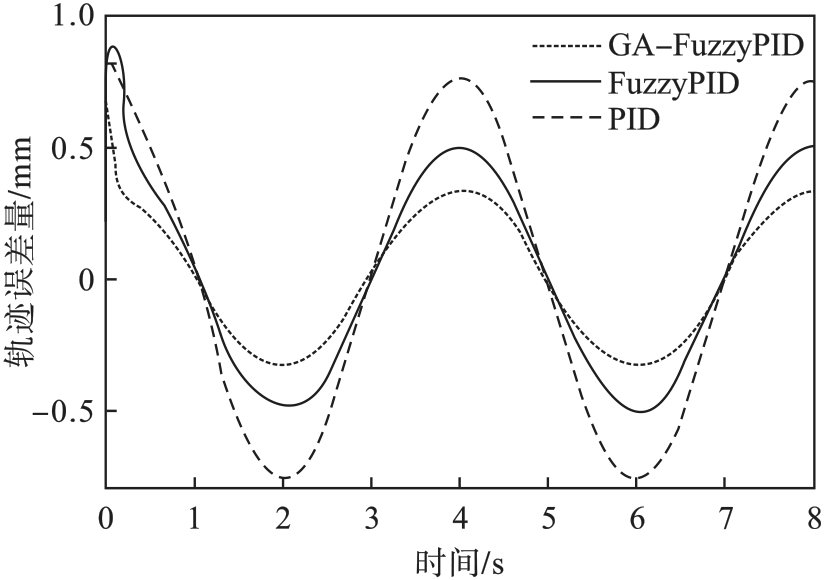
Fig.13 Trajectory tracking error
| 控制器 | 性能指标 | |||
|---|---|---|---|---|
| max( | ISE | ITSE | ITAE | |
| PID | 0.752 | 3.343 | 20.24 | 34.37 |
| FuzzyPID | 0.503 | 1.568 | 8.982 | 22.89 |
| GA-FuzzyPID | 0.332 | 0.685 | 3.991 | 15.26 |
Table7 Controller performance indicators
| 控制器 | 性能指标 | |||
|---|---|---|---|---|
| max( | ISE | ITSE | ITAE | |
| PID | 0.752 | 3.343 | 20.24 | 34.37 |
| FuzzyPID | 0.503 | 1.568 | 8.982 | 22.89 |
| GA-FuzzyPID | 0.332 | 0.685 | 3.991 | 15.26 |
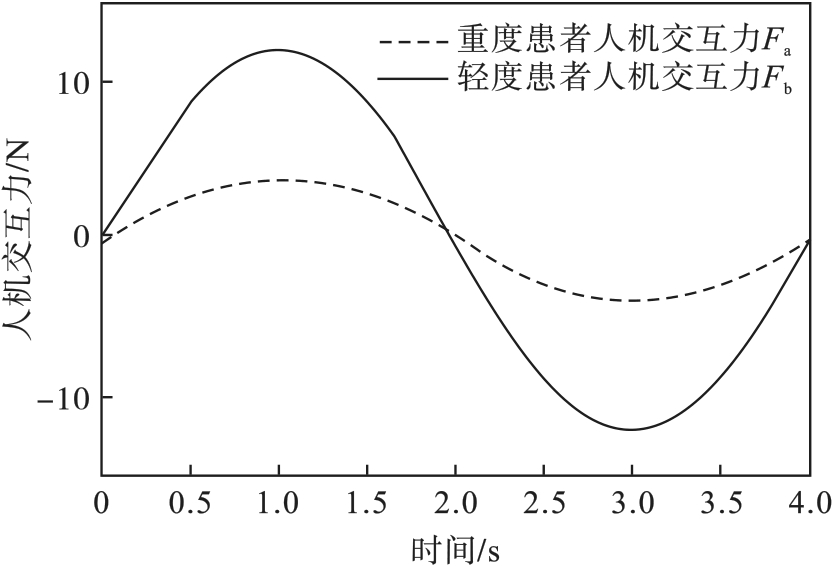
Fig.14 Human?machine interaction force
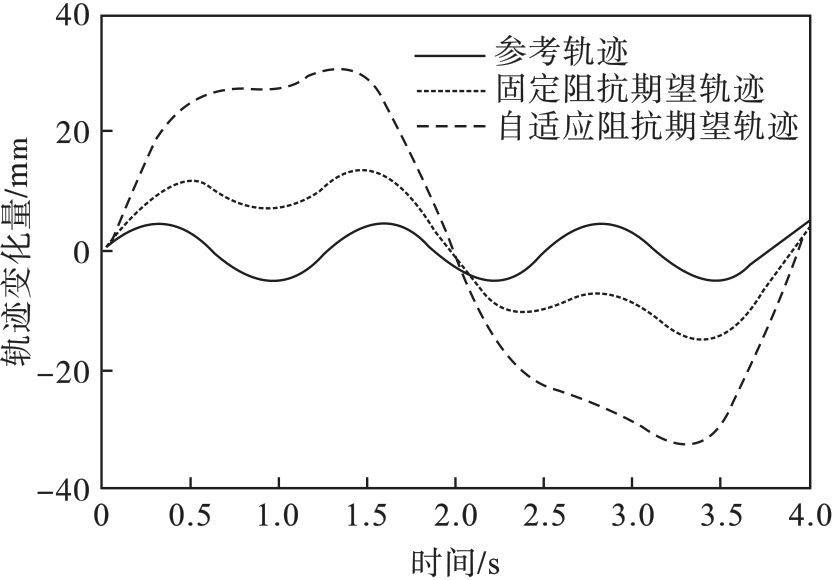
Fig.15 Comparison of impedance trajectory tracking of Group A

Fig.16 Comparison of impedance parameters of Group A
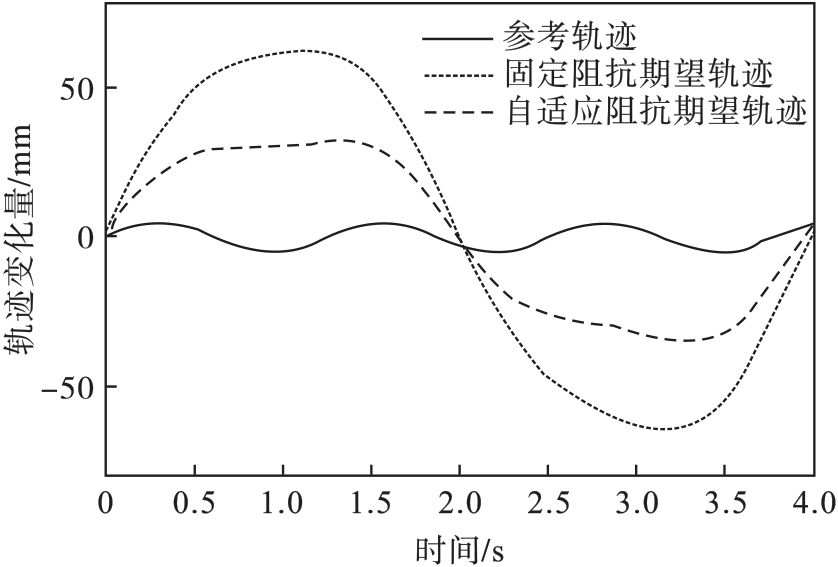
Fig.17 Comparison of impedance trajectory tracking of Group B
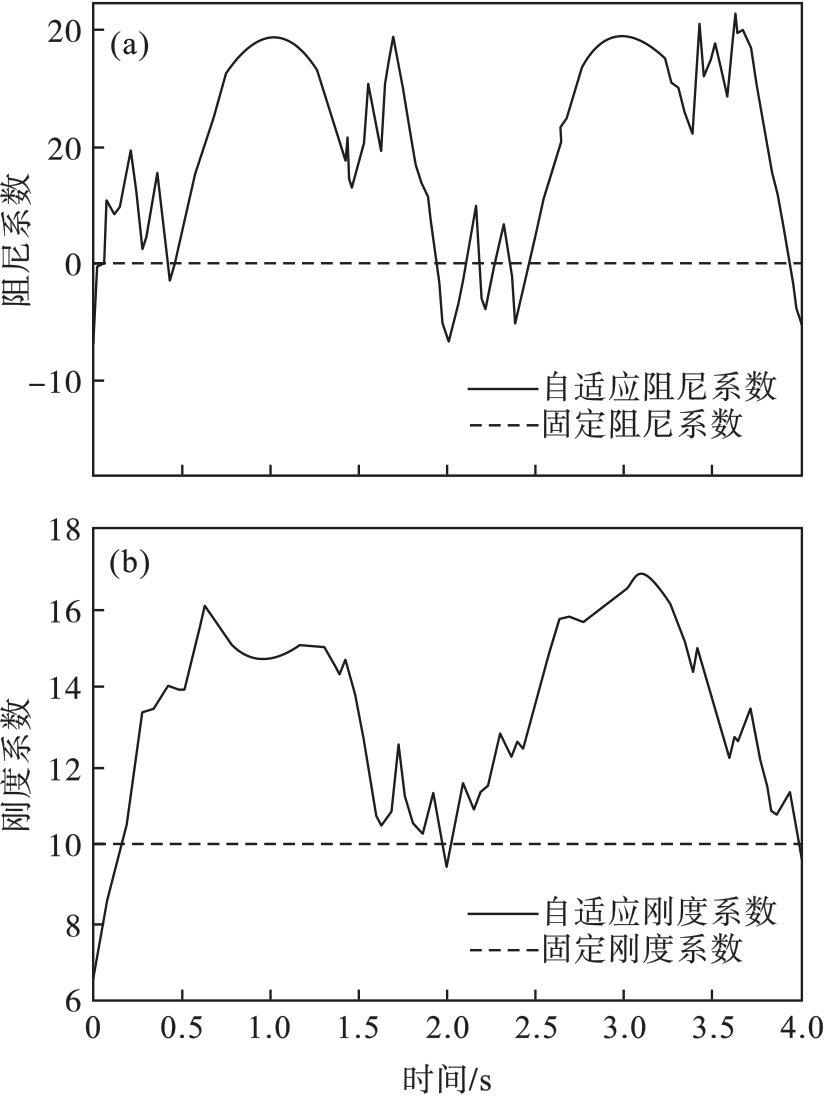
Fig.18 Comparison of impedance parameters ofGroup B
| 1 | Zhang L G, Guo S, Sun Q.Development and assist‑as‑needed control of an end‑effector upper limb rehabilitation robot[J].Applied Sciences,2020,10(19):6684. |
| 2 | 苗青,孙晨阳,张明明,等.基于任务表现的机器人辅助康复自适应控制策略[J].机器人,2021,43(5):539-546. |
| Miao Qing, Sun Chen‑yang, Zhang Ming‑ming,et al. Adaptive control strategy for robot‑assisted rehabilitation based on task performance[J].Robotics,2021,43(5):539-546. | |
| 3 | Hogan N.Impedance control:an approach to manipulation[C]//American Control Conference.San Diego:IEEE,1984:304-313. |
| 4 | Akdoğan E, Aktan M E, Koru A T,et al.Hybrid impedance control of a robot manipulator for wrist and forearm rehabilitation:performance analysis and clinical results[J].Mechatronics,2018,49:77-91. |
| 5 | Jamwal P K, Hussain S, Ghayesh M H,et al.Impedance control of an intrinsically compliant parallel ankle rehabilitation robot[J].IEEE Transactions on Industrial Electronics,2016,63(6):3638-3647. |
| 6 | Khoshdel V, Akbarzadeh A, Naghavi N,et al.sEMG‑based impedance control for lower‑limb rehabilitation robot[J].Intelligent Service Robotics,2018,11:97-108. |
| 7 | Gray V, Rice C L, Garland S J.Factors that influence muscle weakness following stroke and their clinical implications:a critical review[J].Physiotherapy Canada,2012,64(4):415-426. |
| 8 | Andrews A W, Bohannon R W.Distribution of muscle strength impairments following stroke[J].Clinical Rehabilitation,2000,14(1):79-87. |
| 9 | 程晓芳.基于惯性传感器的可穿戴人机交互设备信息控制模型[J].计算机测量与控制,2019,27(6):70-74. |
| Cheng Xiao‑fang.Inertial sensor based information control model for wearable human‑computer interaction devices[J].Computer Measurement and Control,2019,27(6):70-74. | |
| 10 | Tran H T, Cheng H, Duong M K,et al.Fuzzy‑based impedance regulation for control of the coupled human‑exoskeleton system[C]//IEEE International Conference on Robotics and Biomimetics (ROBIO 2014).Bali,2014:986-992. |
| 11 | Sharma R, Gaur P, Bhatt S,et al.Optimal fuzzy logic‑based control strategy for lower limb rehabilitation exoskeleton[J].Applied Soft Computing,2021,105:107226. |
| 12 | Jiang D W, Shi G Q, Pang Z X,et al.Control of a new cycling rehabilitation robot based on fuzzy PID[J].Journal of Physics:Conference Series,2020,1622(1):012119. |
| 13 | Wang H B, Lu T T, Niu B S,et al.Research on fuzzy PID control algorithm for lower limb rehabilitation robot[C]//4th Information Technology and Mechatronics Engineering Conference.Chongqing,2018:956-960. |
| 14 | 卡潘德吉A.骨关节功能解剖学 [M].顾冬云,戴尅戎,译.北京:人民军医出版社,2011. |
| Kapandji A.Functional anatomy of bone and joint[M].Translated by Gu Dong‑yun,Dai Ke‑rong.Beijing:People’s Military Medical Press,2011. |
| [1] | Zhao-hui REN, Yu-lin LIU, Ze-yu JIANG, Xiang-yu CHEN. Adaptive Fault-Tolerant Control of Quadrotor UAV Based on Fuzzy Gain Sliding Mode [J]. Journal of Northeastern University(Natural Science), 2024, 45(2): 209-216. |
| [2] | LI Jie, JIA Chang-wang, QIAO Bin, LIU Jia-yong. Genetic Algorithm for Solving Nonlinear Equilibrium Points of Automobile Steering and Its Improvement [J]. Journal of Northeastern University(Natural Science), 2023, 44(12): 1726-1733. |
| [3] | DING Shan, ZANG Shi-yi, CAO Dian-ming, SHE Li-huang. Security Scheduling Algorithm of CAN Bus Based on Dynamic ID Hopping [J]. Journal of Northeastern University(Natural Science), 2022, 43(3): 350-358. |
| [4] | YANG Dong-mei, LI Da. Asynchronous Dissipative Control for Nonlinear Generalized Markov Jump Systems [J]. Journal of Northeastern University(Natural Science), 2021, 42(9): 1226-1230. |
| [5] | YE Cui-li, WANG Na, PANG Shuo, YAN Hang. Blade Power Consumption Optimization of Straw Crushing Machines Using the Improved Genetic Algorithm [J]. Journal of Northeastern University(Natural Science), 2021, 42(9): 1290-1298. |
| [6] | DING Shan, BAO Lin-hui, GAO Meng-ning, SHE Li-huang. A Security-based CAN-FD Signal Packing Method [J]. Journal of Northeastern University(Natural Science), 2021, 42(6): 775-781. |
| [7] | LIU Jun, YANG Qing-wen, WANG Jin-tao, LIU Hua-wei. Spatial Information Network Restoration Strategy Based on Improved Genetic Algorithm [J]. Journal of Northeastern University(Natural Science), 2021, 42(4): 524-530. |
| [8] | PEI Yu-long, YANG Shi-jun, PAN Heng-yan. Optimization of Buses’ Flexible Departure Intervals Considering Crowdedness State [J]. Journal of Northeastern University(Natural Science), 2021, 42(11): 1663-1672. |
| [9] | LI Zhuang-nian, CHU Man-sheng, LIU Zheng-gen, LI Bao-feng. Prediction and Optimization of Blast Furnace Parameters Based on Machine Learning and Genetic Algorithm [J]. Journal of Northeastern University Natural Science, 2020, 41(9): 1262-1267. |
| [10] | HUANG Chuan, HU Ping, LIAN Jing. A Big Data Method to Rebuild 3D Road Map Based on Vehicle Data [J]. Journal of Northeastern University Natural Science, 2020, 41(6): 771-777. |
| [11] | LIU Fang, LIU Xin-yi, SU Wei-xing, LIN Hui. Online Estimation Method for State of Health of Electric Vehicle Power Battery [J]. Journal of Northeastern University Natural Science, 2020, 41(4): 492-498. |
| [12] | WANG Xin-gang, XU Pei-xi, LI Shang-jie, MA Rui-min. Optimal Design of Interval Reliability for Uncertain Structures [J]. Journal of Northeastern University Natural Science, 2020, 41(4): 521-527. |
| [13] | ZHANG Hua-wei, ZHENG Xiao-tao. Blank Holder Force Prediction of Tailor Welded Blank Based on Neural Network Optimized by Genetic Algorithm [J]. Journal of Northeastern University Natural Science, 2020, 41(2): 241-245. |
| [14] | LIU Fang, MA Jie, SU Wei-xing, HE Mao-wei. Model Parameter Online Identification Based SOC Estimation Method [J]. Journal of Northeastern University Natural Science, 2020, 41(11): 1543-1549. |
| [15] | RU Jing-yu, JIA Zi-xi, WU Cheng-dong. A Sunshine-Based Trajectory Simplification Algorithm [J]. Journal of Northeastern University Natural Science, 2019, 40(8): 1070-1075. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||